
Predicting Depth Maps from Single RGB Images and Addressing
Missing Information in Depth Estimation
Mohamad Mofeed Chaar
a
, Jamal Raiyn
b
and Galia Weidl
c
Connected Urban Mobility, Faculty of Engineering,
University of Applied Sciences, Aschaffenburg, Germany
{MohamadMofeed.Chaar, Jamal.Raiyn, Galia.Weidl}@th-ab.de
Keywords:
Depth Image, Image Segmentation, Cityscape Dataset, Autonomous Driving.
Abstract:
Depth imaging is a crucial area in Autonomous Driving Systems (ADS), as it plays a key role in detecting and
measuring objects in the vehicle’s surroundings. However, a significant challenge in this domain arises from
missing information in Depth images, where certain points are not measurable due to gaps or inconsistencies in
pixel data. Our research addresses two key tasks to overcome this challenge. First, we developed an algorithm
using a multi-layered training approach to generate Depth images from a single RGB image. Second, we
addressed the issue of missing information in Depth images by applying our algorithm to rectify these gaps,
resulting in Depth images with complete and accurate data. We further tested our algorithm on the Cityscapes
dataset and successfully resolved the missing information in its Depth images, demonstrating the effectiveness
of our approach in real-world urban environments.
1 INTRODUCTION
Depth images are used to estimate the distance of ob-
jects at each pixel by employing a stereo camera. The
Cityscapes dataset (Cordts et al., 2016; Cordts et al.,
2015) Depth images are used to estimate the distance
of objects at each pixel by employing a stereo cam-
era. The Cityscapes dataset (Figure1). However, a
significant challenge in Depth imaging is the pres-
ence of missing information, which is a known issue
in the Cityscapes dataset. Our work focuses on two
key tasks:
• Generating Depth images from a single RGB im-
age using a multi-level training approach based on
an image segmentation algorithm.
• Enhancing the accuracy of Depth images by
correcting missing information through our pro-
posed methodology, achieving an accuracy rate of
90.19%.
In addition, our work enhanced the accuracy of Depth
image generation from a single RGB image through
image segmentation(Minaee et al., 2021; Yu et al.,
2023).
a
https://orcid.org/0000-0001-9637-5832
b
https://orcid.org/0000-0002-8609-3935
c
https://orcid.org/0000-0002-6934-6347
The black pixels represent
invalid measurements
Figure 1: The Depth image from the Cityscape dataset con-
tains black pixels, indicating missing information that af-
fects the accuracy of the Depth image.
In a separate phase, we employed deep learning tech-
niques to generate Depth images from the Cityscapes
dataset, followed by applying our model to refine the
data further. This refined dataset has been then used
as a target to train a new model, continuing an it-
erative process (loop training) that has progressively
improved the Cityscapes dataset and has resulted in
higher accuracy (Figure 2). In this study, we have
Chaar, M. M., Raiyn, J. and Weidl, G.
Predicting Depth Maps from Single RGB Images and Addressing Missing Information in Depth Estimation.
DOI: 10.5220/0013365900003941
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 549-556
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
549

applied the loop training process five times. After
the first training iteration, the accuracy of generating
Depth images reached 82.78%. In the last training
loop, the accuracy increased to 90.19%, representing
an improvement of approximately 7.41%.
(a) (b)
Figure 2: Image (a) shows an example from the Cityscapes
dataset before applying our filtering technique to address
missing pixels. Image (b) shows the result after applying
our method, where the missing information has been suc-
cessfully restored.
2 RELATED WORK
Monocular Depth estimation is the task of predicting
a Depth map (distance from the camera) from a sin-
gle RGB image. This is a challenging problem due
to the lack of direct Depth cues (like stereo vision or
motion) in a single image. Moreover, Many Depth
estimation models trained on specific datasets tend to
perform well on those datasets but fail when tested on
new or unseen datasets due to differences in lighting
conditions, camera characteristics, or environmental
contexts. This is a significant issue because creat-
ing large-scale annotated Depth datasets is resource-
intensive. The paper (Ranftl et al., 2020) mixed the
data for better generalization, and the severe weather
(Chaar et al., 2023; Chaar et al., 2024) has also been
included in their data. The authors (Ma et al., 2019)
introduced a method for Depth completion, convert-
ing sparse LiDAR data into dense Depth maps us-
ing RGB images without needing ground-truth Depth
annotations. The approach leveraged self-supervised
learning through photometric and geometric consis-
tency losses, enabling the model to train effectively
by using sparse LiDAR points and monocular images.
It also incorporated stereo image pairs to enhance
Depth accuracy. This framework achieved robust,
high-quality Depth estimation, providing a practical
solution for applications like autonomous driving, this
methodology works well in specific scenes that are
used in training, but it is limited when we general-
ize it in other data. The paper (Xian et al., 2018) ap-
proached predicting relative Depth from a single im-
age using stereo data from the web for weak supervi-
sion. Instead of relying on costly ground-truth Depth
annotations, the method leveraged geometric cues
from stereo images (3600 images) to train a model
that can generalize across diverse scenes. This scal-
able approach pushes the boundaries of monocular
Depth estimation, making it effective for real-world
applications without requiring extensive labeled data.
The paper (Agarwal and Arora, 2023) introduced a
monocular Depth prediction using a novel skip at-
tention mechanism. The model leveraged attention
layers focusing on important features across differ-
ent network scales. By incorporating skip connec-
tions with attention, the model efficiently combines
high-level semantic information with low-level spa-
tial details, improving Depth prediction accuracy. The
authors (Eigen et al., 2014) present an approach for
predicting Depth maps from a single RGB image
by utilizing a multi-scale deep network. The model
processes images at different scales, capturing both
global scene context and fine-grained details to im-
prove Depth estimation accuracy. By combining fea-
tures from multiple resolutions, the network is able
to predict Depth for complex scenes better, handling
variations in scale and structure more effectively. The
paper (Zhang et al., 2023) introduced a novel ap-
proach for monocular Depth estimation using a multi-
scale Laplacian pyramid to fuse Depth predictions at
different scales. By capturing both global and local
Depth information, the model refines Depth estimates
through residual learning at each pyramid level.
Previous studies primarily focused on generating
Depth images by utilizing Depth images as the target
output. In contrast, our methodology has introduced
improvements to the datasets by addressing and cor-
recting missing pixels, allowing us to use the refined
Depth images as target outputs. This approach re-
sulted in a significant increase in accuracy, achieving
a performance of 90.19% as we will see later.
3 METHODOLOGY
3.1 Image Segmentation
Image segmentation is the process of partitioning an
image into multiple segments or regions for each
pixel, with the goal of simplifying the representation
of an image to make it more meaningful and eas-
ier to analyze. One of the most effective architec-
tures for image segmentation tasks, especially in med-
ical imaging, is the U-Net architecture (Ronneberger
et al., 2015), which operates the encoder and decoder
layers to deduce the segmentation for each pixel. In
practice, U-Net can be trained using annotated images
where each pixel is labeled as belonging to a spe-
cific class or object. The loss function that we used
in this work is the Mean Square Error Loss function
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
550
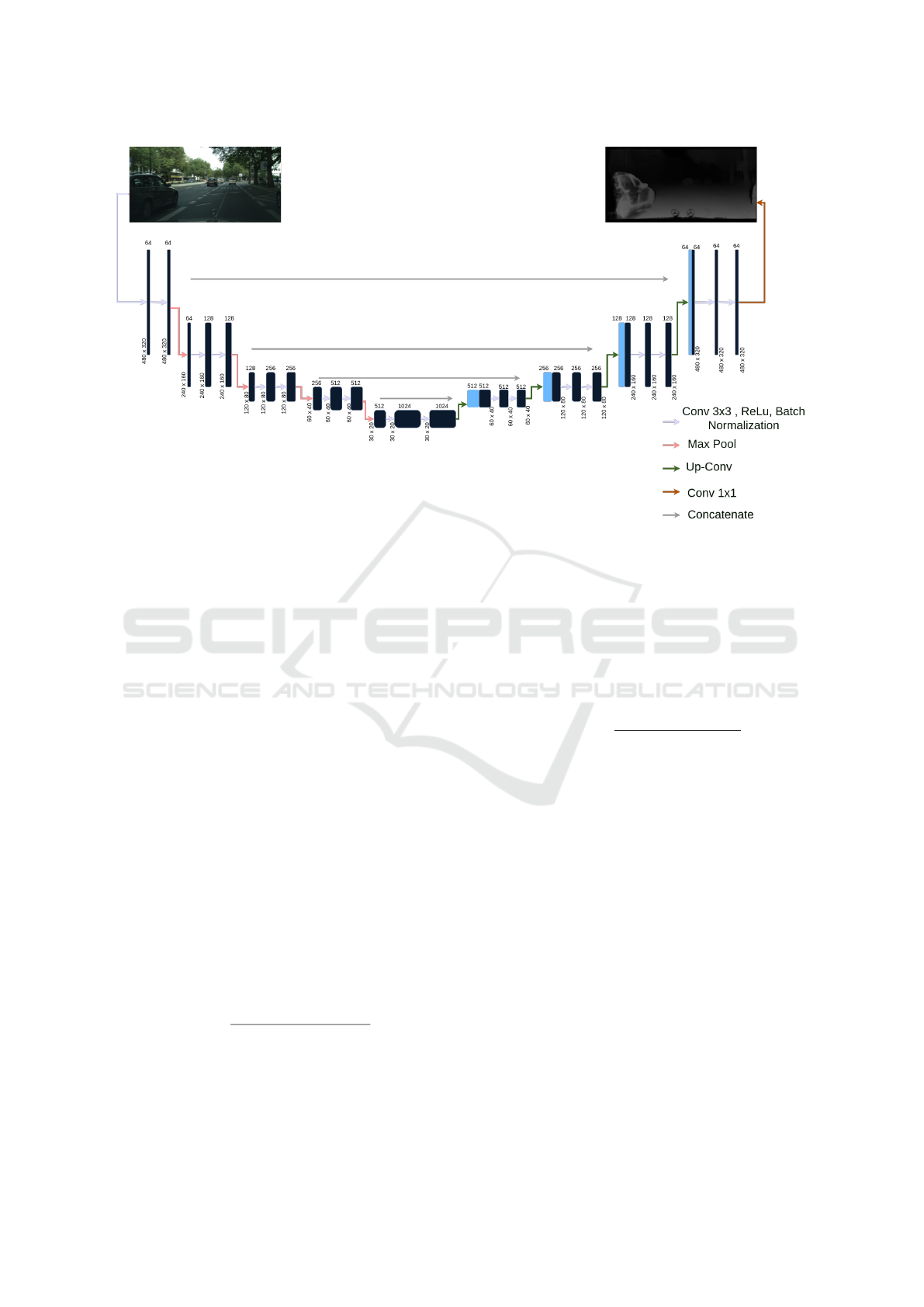
Figure 3: Creator of the U-Net algorithm, which was implemented in our work.
(MSELoss). In our work, we used U-Net to train on
the Cityscapes dataset, with the Depth image as the
target mask. Both input and output images have a res-
olution of 480x320 pixels (Figure 3).
The stereo camera provides two images (left and
right) for each depth image, but since our goal is to
generate depth from a single image, we selected only
the left image for training and omitted the right image.
3.2 Metrics
3.2.1 Accuracy
The accuracy in this work is evaluated based on the
Absolute Error between the predicted pixel values and
the target values of the depth image, calculated using
the following formula:
Aboolute Error pixels =
∑
P∈Pixels
|P −
ˆ
P| (1)
Where P represents the actual pixel value, and
ˆ
P de-
notes the predicted pixel value, the percentage of ac-
curacy is calculated by dividing the absolute error of
the pixels by the sum of all pixel values in the image,
as expressed in the following formula:
Accuracy =
Aboolute Error pixels
∑
P∈Pixels
P
∗ 100 (2)
3.2.2 Corrected Pixels
The primary objective of this work is to correct miss-
ing information in depth images, represented as black
pixels. To establish a criterion for addressing this is-
sue, we calculated the average number of black pix-
els per image (Appendix A), which was found to be
1,206,898. To validate our approach, we calculated
the average number of corrected black pixels per it-
eration, using this as a performance criterion, as ex-
pressed in the following formula which calculate the
percentage of corrected pixels:
Corrected Pixels =
Average o f corrected pixels
Average black pixels
∗ 100 (3)
3.3 Depth Image
Typically, generating a Depth image dataset involves
using a stereo camera(Zhou, 2024) setup, where two
cameras capture images from slightly different an-
gles. The Depth information is obtained by calculat-
ing the disparity between corresponding points in the
two images.
Estimate Depth of pixels is calculated by the fol-
lowing equation(OpenCv, 2024):
Z = B f /disparity (4)
Where B (baseline) is the distance between two cam-
eras where it is 22 cm in the Cityscapes dataset(Cordts
et al., 2016), Z is the Depth of the pixel, and f is the
focal length.
In cityscape datasets, disparity calculated by the fol-
lowing(Team, 2021):
disparity = ( f loat(p) − 1.)/256 (5)
Predicting Depth Maps from Single RGB Images and Addressing Missing Information in Depth Estimation
551

Where p is the value of a pixel in the Depth image,
and it is between [0,126]; furthermore, p = 0 when
the measurement is invalid (Figure 4) (Kaehler and
Bradski, 2016).
Figure 4: The disparity value can be used to calculate dis-
tance using Equation 4.
3.4 Cityscape Datasets
The Cityscapes dataset (Cordts et al., 2016; Cordts
et al., 2015; Downloads, 2016) is a large-scale dataset
created for urban scene understanding, particularly
tailored for research in semantic segmentation, in-
stance segmentation, and depth prediction in com-
plex city environments. This dataset is widely used
in computer vision research due to its high-quality
annotations and realistic street scenes captured from
various German cities. The depth images in the
Cityscapes dataset were generated using stereo cam-
era sensors mounted on a vehicle as it drove through
various European cities. The dataset is organized into
three folders: train, test, and validation, containing
a total of approximately 150,000 images with size
(2048x1024) pixels. In addition to the depth images,
corresponding left and right camera images are pro-
vided, enabling comprehensive analysis and training
for depth estimation and other vision-based tasks.
As shown in Figure 5, the depth image contains black
points, representing invalid measurement areas. In
the Cityscapes dataset, each image has an average of
1,206,898 black pixels (Appendix A), accounting for
57.5% of the image, indicating missing information,
which our work is concerned with solving this prob-
lem.
Figure 5: The image was captured from the Cityscapes
dataset in Frankfurt. Using the left and right stereo images,
a depth image can be generated.
3.5 Iterative Training
The missing information impacts the accuracy of the
training data, reducing accuracy when this data is
used as a target mask in image segmentation algo-
rithms, resulting in an accuracy of 82.78% (Figure 6).
Figure 6: The graphs showing how accuracy and loss
change over the steps. The left graph displays the accu-
racy trend, while the right graph shows the loss trend across
each step; the highest accuracy is 82.78%.
The image segmentation results after training the
data give us a result without missed information
which means a smoother image but with an accuracy
of 82.78% for the pixels that have been filled in Depth
image (Figure 7).
We trained our model for image segmentation to en-
hance the Depth of images and address the issue
of black pixels. After predicting each image, we
examined every pixel in the Depth image from the
Cityscape dataset. The zero-value pixels are replaced
with the corresponding pixel values predicted by our
model for the same location, effectively filling in the
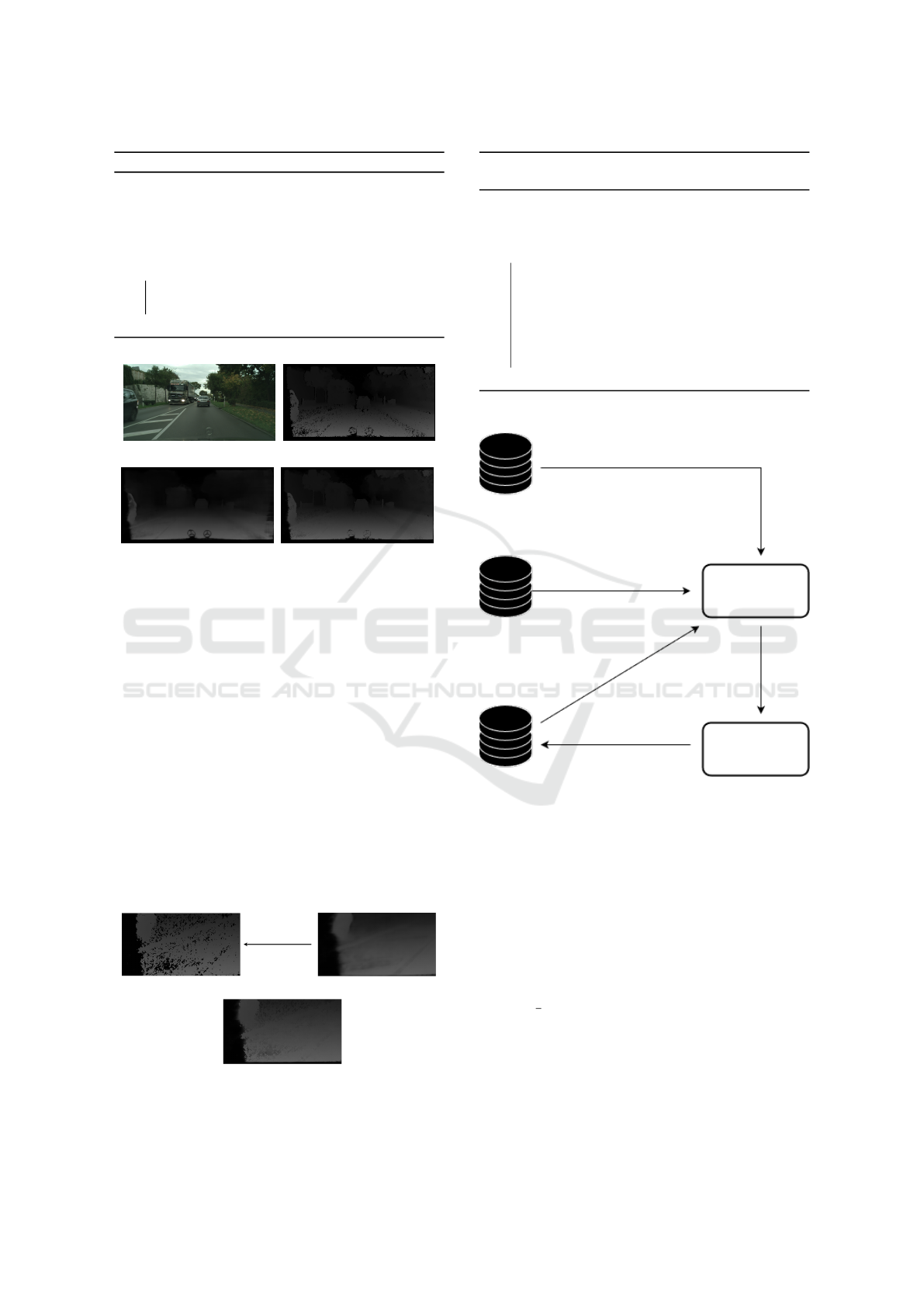
missing Depth information (Algorithm 1)(Figure 8).
The results shown in Figures 7 and 8 illustrate our
initial training (first iteration). At this stage, we en-
hanced the Depth images, achieving complete images
without missing information, which we filled using
our predictions with an accuracy of 82.78%. These
improved images can now be utilized to train our data
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
552
Algorithm 1: How to Fix black pixels in Depth image.
Data: Depth image
Result: Fix missing information in Depth
image
initialization;
predict depth image using our model;
while There is Pixel with value zero do
Replace it with the value of the predicted
image in the same position;
end
(a) (b)
(c) (d)
Figure 7: Figure (a) presents an example from the
Cityscapes dataset captured in Lindau city. Figure (b) de-
picts a Depth map generated using the stereo camera. Fig-
ure (c) illustrates the predicted depth map produced by our
initial model training. Finally, Figure (d) demonstrates an
enhanced version of the depth map generated by the stereo
camera (Figure b), achieved through our proposed method,
as reflected in the improvements shown in Figure (c).
further and serve as masks for image segmentation in
the next training iteration. This approach increases
accuracy, as the masks used are free from missing in-
formation (Algorithm 2) (Figure 9).
When using enhanced depth images, the accu-
racy of training the dataset improved with each it-
eration. During the first training iteration, an accu-
racy of 82.78% was achieved. After enhancing the
datasets, the accuracy increased to 88.16%. Based on
this improvement, we decided to iterate the training
Depth Image
Predicted Depth from RGB Image
Improve
Result
Figure 8: The Depth image from the Cityscape dataset con-
tains black pixels, indicating missing information that af-
fects the accuracy of the Depth image.
Algorithm 2: In iterative training, we process the datasets
using the latest depth images, which we have enhanced.
Data: Depth image
Result: Depth image without missed
information
while Iteration do
Train a new model using Depth images as
a mask;
Improve Depth image using our model
(Algorithm 1);
Update Depth images by improved Depth
images;
end
RGB Images
Depth Images
Train
Train
New Model
Predict Depth
images
Data Predicted
from the last
model
Improve Depth images
Enhanced
Depth Images
Figure 9: This diagram illustrates the iterative training pro-
cess, where we train our datasets to predict depth images.
We then enhance the depth images in the Cityscape dataset
and retrain using the enhanced images. With each iteration,
we observe an increase in accuracy. In this work, we re-
peated the training process five times.
process five times, ultimately achieving an accuracy
of 90.19%.
3.6 Correct Missed Information Using
U Net
According to our previous work, we improved depth
images by filling in the missing information with
highly accurate predictions during the final iteration
of training (90.19%). However, the correction pro-
cess is time-consuming and impractical, as it requires
Predicting Depth Maps from Single RGB Images and Addressing Missing Information in Depth Estimation
553
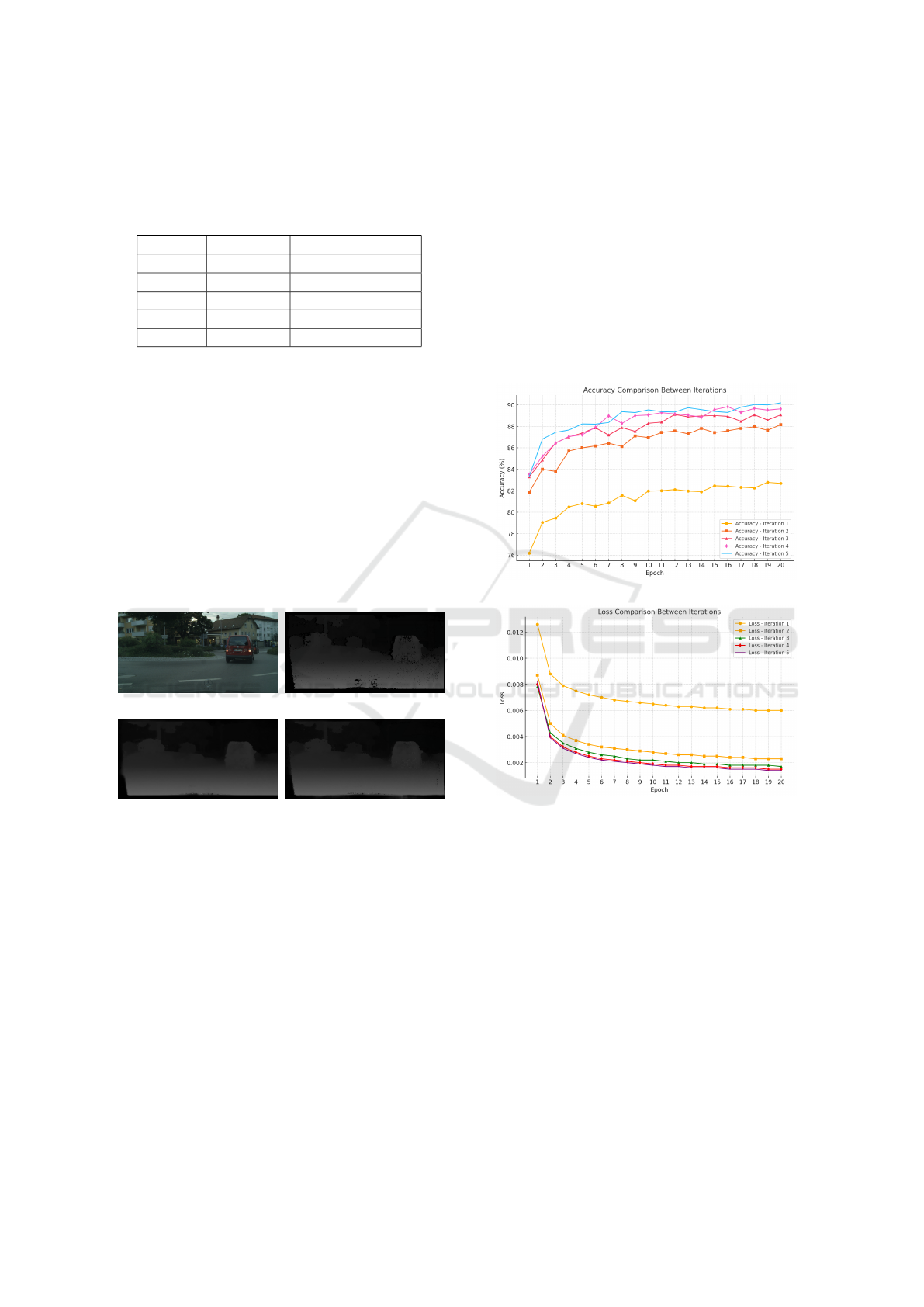
Table 1: The accuracy and the percentage of corrected
pixels improved significantly through our iterative learning
process. As observed, the training accuracy of our model in-
creased steadily, and the percentage of corrected black pix-
els also showed a consistent rise.
Iterative Accuracy
1
Corrected Pixels
2
1 82.78% 58.3%
2 88.16% 65.8%
3 89.11% 70.5%
4 89.83% 72,5%
5 90.19% 73.3%
1
According to our formula at Equation 2
2
According to our formula at Equation 3
predicting each image and checking every pixel to fill
in the missing information (806 ms for each frame)
for our computer properties, see Appendix B. Fortu-
nately, we already have depth images and their cor-
rected versions from our earlier work. This allows us
to train a new image segmentation model, using the
depth images with missing information as input and
the corrected images as masks. The model can then
predict new images with corrected missing informa-
tion using AI, where we have achieved an accuracy of
96.44% (Figure 10d) which it costs (19 ms for each
frame).
(a) (b)
(c) (d)
Figure 10: Figure (a) presents an example from the
Cityscapes dataset captured in Lindau city. Figure (b) de-
picts a Depth map generated using the stereo camera. Fig-
ure (c) illustrates our model to enhance the missed informa-
tion from the depth image using the U-Net algorithm (the
input is an image (b)). Finally, Figure (d) demonstrates an
enhanced version of the depth map generated by the stereo
camera (Figure b), achieved through our proposed method,
as reflected in the improvements shown in Figure (d).
4 RESULTS AND DISCUSSION
Building upon our previous approach, we success-
fully accomplished multiple tasks in this work, as out-
lined below:
• Generating depth images from a single RGB
image using an iterative training approach, we
steadily improved the accuracy of depth predic-
tions with each iteration. The iterative process
demonstrated consistent progress, with accuracy
increasing at each step, showcasing the effective-
ness of the refinement and optimization strategies
applied during training.
• Improving Depth Image Accuracy with U-Net and
Self-Supervised Learning: Leveraging enhanced
depth maps as masks to correct missing informa-
tion, achieving 96.44% accuracy.
(a)
(b)
Figure 11: Figure a: Accuracy Trends Across Epochs for
Multiple Iterations This figure illustrates the progression of
accuracy across epochs for five iterations, highlighting im-
provements and comparisons between each iteration. Fig-
ure b: Loss Trends Across Epochs for Multiple Iterations
This figure depicts the reduction of loss across epochs for
five iterations, demonstrating the convergence behavior and
performance stability over time.
5 CONCLUSIONS
This study demonstrates a comprehensive approach
to addressing the challenge of missing information in
Depth images, a critical aspect of Autonomous Driv-
ing Systems (ADS). By employing iterative training
combined with deep learning techniques, we success-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
554

fully generated and refined Depth images from single
RGB inputs, achieving a notable accuracy improve-
ment from 82.78% to 90.19% over five iterations. The
iterative refinement process not only enhanced the ac-
curacy but also significantly reduced the percentage
of missing pixels in Depth images.
Additionally, leveraging the U-Net algorithm for
image segmentation allowed us to automate and ac-
celerate the correction process, further improving the
prediction accuracy to 96.44%. These advancements
were validated using the Cityscapes dataset, which
served as an effective benchmark for urban scene
understanding in autonomous driving applications.
Our methodology demonstrated robust performance
in filling missing information, as evidenced by sub-
stantial improvements in corrected pixel percentages
and accuracy metrics.
This work lays a strong foundation for future re-
search aimed at enhancing Depth image generation
and refinement techniques. The iterative training ap-
proach and segmentation-based corrections can be
extended to other datasets and use cases, such as
3D reconstruction, robotics, and other computer vi-
sion applications, where accurate depth information is
paramount. Future directions may include optimizing
the computational efficiency of the model and explor-
ing multi-modal input strategies to further improve
depth prediction performance in real-time scenarios.
REFERENCES
Agarwal, A. and Arora, C. (2023). Attention attention ev-
erywhere: Monocular depth prediction with skip at-
tention. In Proceedings of the IEEE/CVF Winter Con-
ference on Applications of Computer Vision, pages
5861–5870.
Chaar, M., Weidl, G., and Raiyn, J. (2023). Analyse the
effect of fog on the perception. EU Science Hub, page
329.
Chaar, M. M., Raiyn, J., and Weidl, G. (2024). Improving
the perception of objects under foggy conditions in the
surrounding environment. Research square.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3213–3223.
Cordts, M., Omran, M., Ramos, S., Scharw
¨
achter, T., En-
zweiler, M., Benenson, R., Franke, U., Roth, S., and
Schiele, B. (2015). The cityscapes dataset. In CVPR
Workshop on The Future of Datasets in Vision.
Downloads, C. D. (2016). Cityscapes dataset downloads.
https://www.cityscapes-dataset.com/downloads/. Ac-
cessed: February 5, 2025.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. Advances in neural information pro-
cessing systems, 27.
Kaehler, A. and Bradski, G. (2016). Learning OpenCV 3:
computer vision in C++ with the OpenCV library. ”
O’Reilly Media, Inc.”.
Ma, F., Cavalheiro, G. V., and Karaman, S. (2019). Self-
supervised sparse-to-dense: Self-supervised depth
completion from lidar and monocular camera. In 2019
International Conference on Robotics and Automation
(ICRA), pages 3288–3295. IEEE.
Minaee, S., Boykov, Y., Porikli, F., Plaza, A., Kehtarnavaz,
N., and Terzopoulos, D. (2021). Image segmenta-
tion using deep learning: A survey. IEEE transac-
tions on pattern analysis and machine intelligence,
44(7):3523–3542.
OpenCv (2024). Depth map from stereo images. Last ac-
cessed 18 November 2024.
Ranftl, R., Lasinger, K., Hafner, D., Schindler, K., and
Koltun, V. (2020). Towards robust monocular depth
estimation: Mixing datasets for zero-shot cross-
dataset transfer. IEEE transactions on pattern anal-
ysis and machine intelligence, 44(3):1623–1637.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical image computing and
computer-assisted intervention–MICCAI 2015: 18th
international conference, Munich, Germany, October
5-9, 2015, proceedings, part III 18, pages 234–241.
Springer.
Team, C. (2021). cityscapesscripts. Last accessed 17
November 2024.
Xian, K., Shen, C., Cao, Z., Lu, H., Xiao, Y., Li, R., and
Luo, Z. (2018). Monocular relative depth perception
with web stereo data supervision. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 311–320.
Yu, Y., Wang, C., Fu, Q., Kou, R., Huang, F., Yang, B.,
Yang, T., and Gao, M. (2023). Techniques and chal-
lenges of image segmentation: A review. Electronics,
12(5):1199.
Zhang, A., Ma, Y., Liu, J., and Sun, J. (2023). Promot-
ing monocular depth estimation by multi-scale resid-
ual laplacian pyramid fusion. IEEE Signal Processing
Letters, 30:205–209.
Zhou, R. (2024). Scalable multi-view stereo camera array
for real-time image capture and 3d display in real-
world applications. Mathematical Modeling and Al-
gorithm Application, 2(2):43–48.
APPENDIX A
We calculate the average number of black pixels
across all Depth images in the Cityscapes dataset us-
ing the following formula:
Average black pixels =
1
N
N
∑
P∈P
Π
Predicting Depth Maps from Single RGB Images and Addressing Missing Information in Depth Estimation
555

Where P is the pixels in the image, N is the number
of images, which is 150 thousand images in our work
and Π as the following:
Π =
(
1 if p = 0
0 else
APPENDIX B
In our work, we employed an NVIDIA RTX 4090
graphics card, an Intel Core i9-14900K CPU, and 64
GB of RAM operating at 4000 MT/s.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
556
