
Interactive Problem-Solving with Humanoid Robots and Non-Expert
Users
Duygun Erol Barkana
1 a
, Mattias Wahde
2 b
and Minerva Suvanto
2 c
1
Yeditepe University, Kayıs¸da
˘
gı, Atas¸ehir,
˙
Istanbul, Turkey
2
Chalmers University of Technology, SE-412 96 Gothenburg, Sweden
duygunerol@yeditepe.edu.tr, {mattias.wahde, minerva.suvanto}@chalmers.se
Keywords:
Interpretable Models, Conversational AI, Human-Robot Interaction, NAO Robot.
Abstract:
We study conversational interaction between a humanoid (NAO) robot and a human user, using a glass-box
dialogue manager (DAISY). The aim is to investigate how such an interaction can be organized in order for a
non-expert user to be able to interact with the robot in a meaningful way, in this case solving a scheduling task.
We compare two kinds of experiments, those that involve the NAO robot and the dialogue manager, and those
that involve only the dialogue manager. Our findings show a rather clear preference for the setup involving
the robot. Moreover, we study the level of linguistic variability in task-oriented human-machine interaction,
and find that, at least in the case considered here, most dialogues can be handled well using a small number of
patterns (for matching user input) in the agent.
1 INTRODUCTION
Robots are taking an active role in many fields, such
as education, health care, and assistance (Youssef
et al., 2022). Humanoid robots are among the most
dominant categories in spoken human-robot inter-
action (Reimann et al., 2024). These robots are
designed specifically to interact with human users
(Breazeal et al., 2016), for example by using spo-
ken dialogue. The interaction of humans with social
robots plays a crucial role (Baraka et al., 2020; Fong
et al., 2003) in the context of elderly care (Broekens
et al., 2009) and education (Belpaeme et al., 2018).
Different robotic platforms have been used with vary-
ing interaction modalities for human-robot interaction
(Youssef et al., 2022; Reimann et al., 2024) bearing in
mind that spoken dialogue systems are not restricted
to specific robots with certain shapes or features. The
small, commercially available humanoid robot NAO
is preferred in many studies due to its affordability
compared to other robots with similar functionality,
its wide range of capabilities, and its ability to act
as a platform for evaluating human-robot interaction
(Amirova et al., 2021; Pino et al., 2020).
However, in most cases, robots are demonstrators
a
https://orcid.org/0000-0002-8929-0459
b
https://orcid.org/0000-0001-6679-637X
c
https://orcid.org/0009-0003-1751-151X
rather than usable tools. Going from a carefully or-
chestrated demonstration to a fully operational and re-
liable robotic system is a daunting task for several rea-
sons, including issues related to reliability and safety,
as well as the ability of the robot to handle new and
unexpected situations. Another reason is that the in-
tended end users - for instance, medical doctors or
teachers - are rarely robotics experts. Instead, to be
useful from their point of view, the robot should seam-
lessly be integrated into the daily work activities of
its users. Those activities may involve a need to tune
the robot’s behaviors, or to add new behaviors, both
of which are very hard to achieve for a non-expert.
In this paper, we will describe a method for conver-
sational interaction between a non-expert user and a
small humanoid robot (NAO). In other words, we will
illustrate how a non-expert user, with our method, can
carry out meaningful interactions with the robot to
complete the task at hand.
At present, studies on human-machine verbal in-
teraction are dominated by the use of large lan-
guage models (LLMs), popularized in chatbots such
as ChatGPT. While such systems have indeed had a
massive impact on the development of dialogue ca-
pabilities in artificial systems, they also suffer from
several drawbacks (Wahde, 2024), one such drawback
being their lack of interpretability: LLMs are essen-
tially black boxes that struggle with accountability,
reliability, and safety. Moreover, they are prone to
870
Erol Barkana, D., Wahde, M. and Suvanto, M.
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users.
DOI: 10.5220/0013369000003890
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 870-879
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

what is sometimes referred to as hallucinations, i.e., a
propensity to make up answers that are factually in-
correct. This problem, in particular, limits their use-
fulness in high-stakes applications (Rudin, 2019) such
as, for example, in healthcare.
In this paper, as the primary task, we will study the
specific problem where a doctor wishes to generate a
daily schedule for a patient with the help of an interac-
tive system. Instead of an LLM-based system, we will
use our precise dialogue manager DAISY (Wahde
and Virgolin, 2023) that, unlike the currently popu-
lar LLM-based chatbots, does not hallucinate. On
the other hand, DAISY’s conversational capabilities
are much more limited than those of an LLM-based
chatbot. Hence, as a secondary task, we will investi-
gate to what degree a dialogue manager of this kind
is capable of handling the variability (as induced by
the human users) of dialogue that occurs naturally in
human-machine interactions, even in cases such as
ours, where the task is rather narrowly defined.
2 INTERACTIVE SYSTEM
PLATFORM
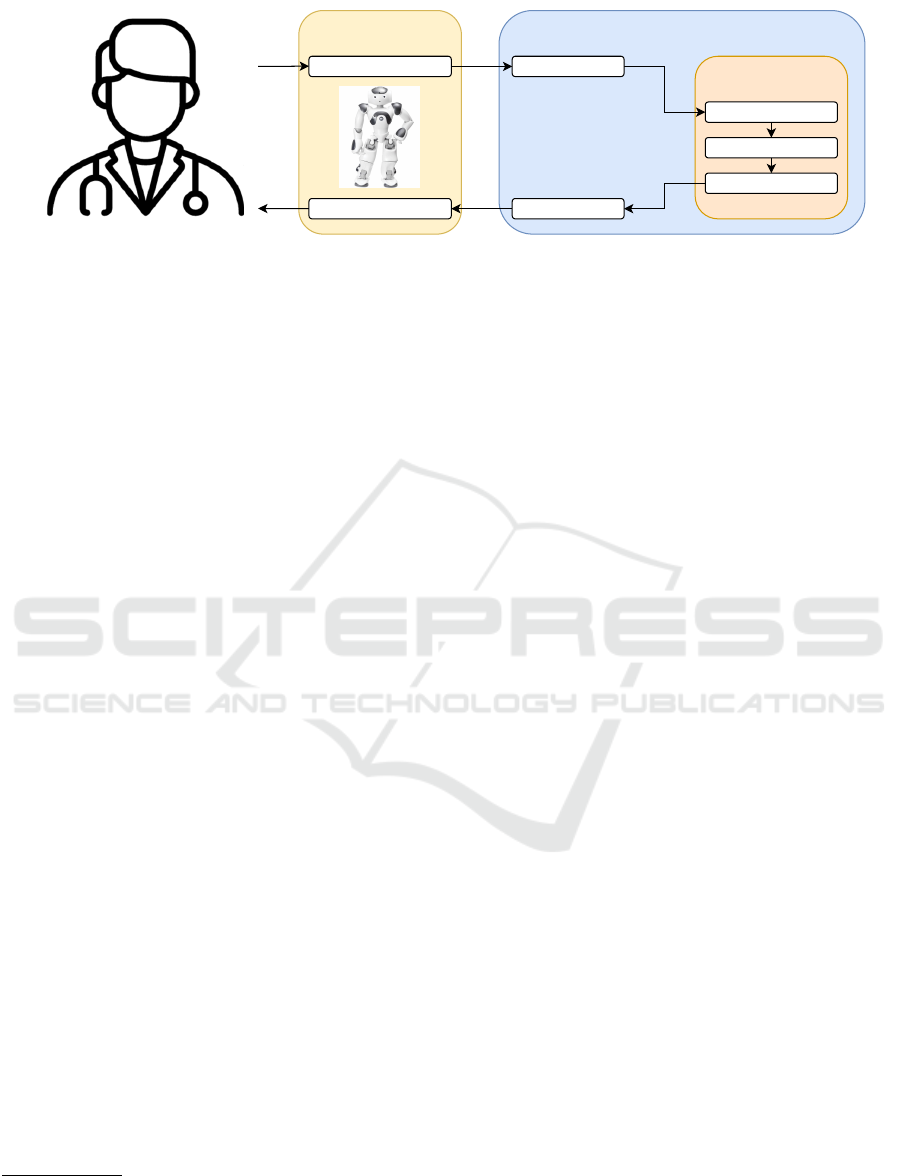
The overall system architecture is shown in Figure 1.
As can be seen in the figure, a human operator gives
input to NAO in the form of speech. The recorded
speech is then transferred to an external computer
(connected to NAO through a wireless network) that
carries out speech recognition, i.e., converting the
speech recording to text. Next, the text is passed
to DAISY, which then carries out its processing in
three steps: Language understanding (input match-
ing), cognitive processing (thinking, of sorts), and, fi-
nally, response generation. The (textual) response and
a suitable animation (movement) sequence are then
passed to NAO. The robot then carries out the anima-
tion (if any) while, at the same time, presenting its
output in the form of speech.
The following subsections provide a more detailed
description of the robot, the dialogue manager, and
their communication.
2.1 Robot: NAO
The NAO robot is 0.58 m tall and weighs 4.5 kg. The
version used in this study is NAO v.6. The robot has a
Python SDK (Naoqi) available, allowing researchers
to easily control the hardware and to design robot be-
haviors involving motion processing, speech, and vi-
sion. NAO has support with its application program-
ming interface (API) for natural user interaction.
The onboard sensors include an inertial measure-
ment unit (IMU), touch and force sensors, and sonars.
The force-sensitive sensors are on the hands and feet
and are used for detecting contact with objects. Light-
emitting diodes (LEDs) are located on the eyes and
the body. There are four microphones to identify the
source of sounds and two loudspeakers for communi-
cation. NAO has two hands with self-adapting grip-
ping abilities, but a single engine controls the three
fingers of each hand, so they cannot be moved inde-
pendently. It has 25 degrees of freedom in the joints,
allowing independent movement of the head, shoul-
ders, elbows, wrists, waist, legs, knees, and ankles.
The robot also has two built-in cameras, one at
the mouth level and the other on its forehead. Both
are 920p cameras able to run at 30 images per second
with (up to) 1280 × 720-pixel images. NAO’s head
can move 68 degrees vertically and 239 degrees hori-
zontally. NAO can see 61
◦
horizontally and 47
◦
verti-
cally with its cameras located in the forehead. Hence,
it has a good overview of its environment. Its fore-
head camera records videos of the person in front of
NAO during the interaction.
The NAO robot has been used in social robotics
research as a tutor, a therapist, and a peer learner
(Amirova et al., 2021; Namlisesli et al., 2024). In
educational settings it has been used with children
(Tanaka and Matsuzoe, 2012; Lemaignan et al., 2016)
and university students (Banaeian and Gilanlioglu,
2021). As a therapist or assistant in rehabilitation,
research with NAO has been done with patients that
have cognitive impairments (Pino et al., 2020), as well
as physically impaired patients (Pulido et al., 2017).
In this study, the NAO robot will transmit what the
user says to the DAISY dialogue manager and ver-
bally report the information from DAISY back to the
user.
2.2 Dialogue Management
Currently, most research in conversational AI is de-
voted to chatbots based on large language mod-
els (LLMs), such as, for example, GPT-4 (OpenAI,
2023), LLAMA-2 (Touvron et al., 2023), and so on.
These models are highly capable in the sense that
they can and will respond to any questions posed to
them (except for certain questions that, for example,
involve offensive language). Such models generate
responses probabilistically, token by token. While
this process often results in sensible answers, LLM-
based chatbots also quite often (and unpredictably)
generate output that is factually incorrect or even
completely nonsensical, sometimes simply making
things up (a phenomenon sometimes called hallu-
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users
871
Doctor
NAO Computer
Audio and video recording
Speech and animation
Speech recognition
DAISY
Language understanding
Cognitive processing
Response generation
Animation
Figure 1: System Architecture.
cination, although one should be careful to avoid
drawing detailed parallels with hallucination in hu-
mans). This is a persistent problem, despite various
measures that have been taken to counteract it, such
as fine-tuning and using retrieval-augmented gener-
ation (Lewis et al., 2020) or step-by-step reasoning.
Moreover, sometimes chatbots may even respond in a
strongly aggressive manner (Si et al., 2022), a highly
undesirable feature in an AI system operating in, say,
a healthcare setting or a teaching situation. As men-
tioned above, LLMs are, to all intents and purposes,
black-box models whose inner workings are not ac-
cessible to a human observer. Moreover they are
trained over huge data sets that may (and often do)
contain offensive language and unwanted biases.
Taken together, these aspects of LLMs (and,
indeed, black-box models in general) imply that
such models are not suitable in high-stakes situa-
tions (Rudin, 2019) such as, for example, in mental
health care (Coghlan et al., 2023) and elderly care:
A model that lacks transparency also lacks safety and
accountability.
It is precisely for those situations that the DAISY
dialogue manager (Wahde and Virgolin, 2023) has
been developed. This dialogue manager allows for
a very precise, reliable, accountable, and fully trans-
parent interaction between a human user and a com-
puter. Moreover, DAISY has a built-in procedure for
providing correct-by-construction explanations of its
reasoning
1
.
On the negative side, DAISY’s capabilities are
generally limited to the task at hand and are, at
present, encoded by hand (a procedure for allowing
automated learning is under development, however).
Furthermore, unlike LLM-based chatbots, DAISY
is neither probabilistic nor generative. Thus, while
DAISY is by no means a direct competitor to LLM-
based chatbots over their full range of applicability,
1
It should be noted that, if prompted, an LLM-based
chatbot will also provide an explanation, but there is no
guarantee that the explanation (or the original statement, for
that matter) is correct.
in its present state the model is useful in clearly de-
fined tasks, where precision and reliability are more
important than flexibility and human likeness.
A detailed description of DAISY can be found
in (Wahde and Virgolin, 2023). Here, only a brief
overview will be given. It should be noted that, re-
cently, DAISY has undergone important modifica-
tions, such that (i) its declarative memory (facts) are
now instead stored as a knowledge graph (KG) and
(ii) it includes another KG that contains linguistic and
grammatical information, such as explicit similarity
relationships between words and phrases. The basic
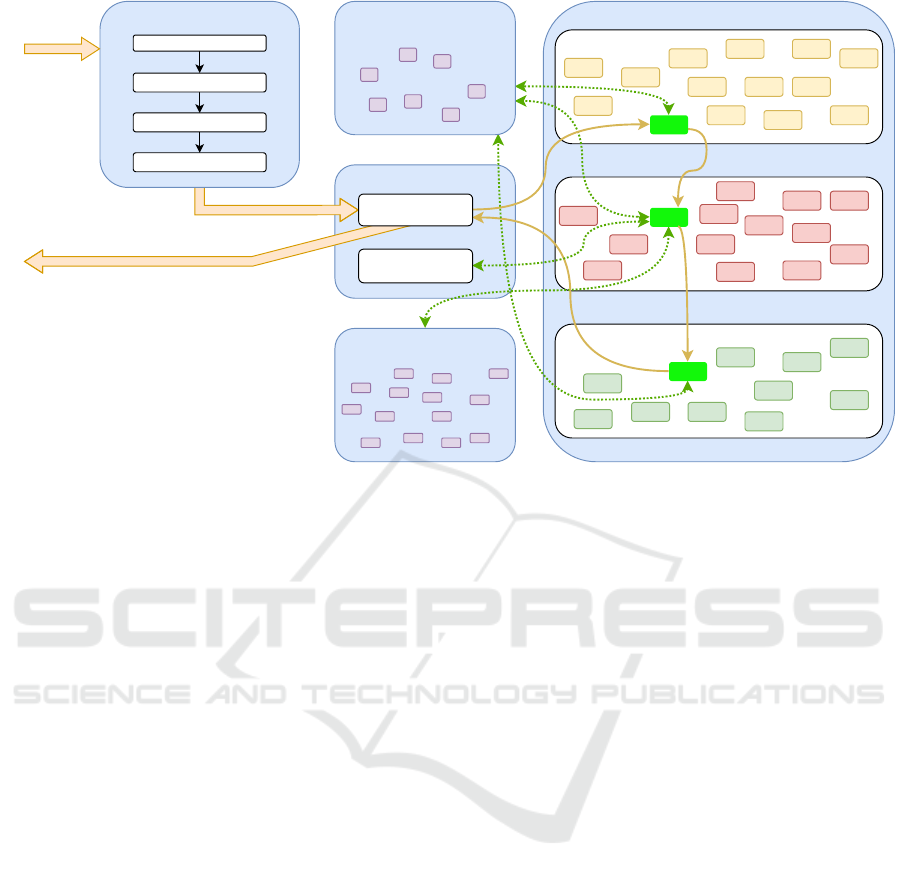
flow of information in DAISY is shown in Figure 2.
The input to DAISY is in the form of a text
string, obtained either by typing on a keyboard or
via speech recognition (that, in itself, is not a part of
DAISY). The text string is then preprocessed, by car-
rying out the steps of tokenization, spelling correc-
tion, spelling normalization (for example, converting
between British and American spelling), and punctua-
tion handling (splitting text into sentences, if needed).
Then, the text is passed through a linguistic KG that
handles paraphrasing, meaning that (when possible) it
generates alternative texts that are semantically iden-
tical to the given input text.
After that, the text (with all the variants just men-
tioned) is passed to the procedural memory, consist-
ing of three different types of entities: Input items that
match the input text in order to determine what pro-
cessing needs to be carried out, cognitive items that
do the actual processing, retrieving relevant data (if
any) from working memory and (long-term) declara-
tive memory, and output items that formulate the out-
put text, using (when needed) variables that were gen-
erated in the cognitive processing step.
The input matching is based on patterns with vary-
ing levels of complexity: The simplest possible pat-
tern specification consists of a single string such as I
want to make a schedule for a patient. However, since
the user input is matched exactly against the stored
patterns, typically the patterns must be quite a bit
more dynamic to handle the natural variability in user
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
872
Language model
Declarative memory
Input items
Procedural memory
Cognitive items
Output items
User input
Working memory
tokenization
Preprocessing
spelling correction
spelling normalization
punctuation handling
language processing
(various aspects)
Agent output
paraphrasing
Figure 2: A schematic view of the DAISY dialogue manager.
input. A more sophisticated pattern for the case just
mentioned could take the form I (WANT) to (MAKE) a
(daily;-), (PLAN) for a patient. Here, the specification
(daily;-) means that the word daily is optional. The
capitalized specifications, e.g. (MAKE), represent se-
mantic grammars (SGs), i.e., a set of words or phrases
with identical meaning. For example, in the case of
(MAKE), the semantic grammar is defined as (MAKE)
= (make; create; generate; establish; set; organize;
arrange; define; plan), and so on. Thus, the sample
pattern just described would be matched by user in-
puts such as I want to make a plan for a patient, I want
to generate a schedule for a patient, I wish to define a
daily plan for a patient, and so on. Note that patterns
can also define variables that are placed in working
memory. For example, the pattern I want to make
a schedule for (TITLE) $name, where the SG (TI-
TLE) is defined as (TITLE) = (Mr.,Mrs.,Ms.), would
be matched by, say, I want to make a schedule for
Mr. Duck, in which case the variable $name (in work-
ing memory) would hold the name Duck, making it
available during cognitive processing (which may, for
example, involve extracting a room number for the
patient in question; see also the dialogue examples
below).
After input matching, cognitive processing and
output generation ensues, during which the agent car-
ries out a sequence of steps necessary for determining
which output to return to the user. This procedure
will not be described here, but the interested reader
can find a thorough description in (Wahde and Vir-
golin, 2023). The generated output text is then again
passed through the linguistic KG, where it can be
paraphrased to allow for a more human-like output,
rather than just robotically answering similar ques-
tions in exactly the same way.
Specifying a DAISY agent for a particular task in-
volves defining input, cognitive, and output items us-
ing a scripting language, a process that is further de-
scribed in (Wahde and Virgolin, 2023). The specifica-
tion of input items, which is our focus here, involves
the definition of a set of patterns that together handle
the natural variation in the human-agent interaction.
This would be a near-impossible task for general in-
teraction over an unlimited range of topics (where in-
stead LLMs excel). However, in a task-oriented set-
ting, where the user is trying to achieve a specific out-
come, it may be possible to provide a sufficiently var-
ied set of patterns with a reasonable effort. Determin-
ing whether this is actually the case is indeed one of
the tasks in this paper, as outlined at the end of Sec-
tion 1. The analysis related to this issue is presented
in Section 4 below.
2.3 NAO-DAISY Interaction
The user can interact with the DAISY dialogue man-
ager either directly (via textual input on a keyboard)
or via NAO (using speech). A client-server configu-
ration is used, where the computer (running DAISY)
is the server and NAO is the client.
Robots that use speech as a primary mode of inter-
action need to understand the user’s utterances and se-
lect appropriate responses given the context: A social
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users
873
robot with conversation ability acquires sound sig-
nals, processes these signals to recognize sequences
of words in the user’s input, and then formulates an
appropriate reply (using DAISY, in our case). The
robot synthesizes the sound signal corresponding to
the reply, and then emits this signal using a loud-
speaker.
The external computer (See Figure 1) runs a pro-
gram, here called the main script, which is responsi-
ble for handling the interaction between the DAISY
dialogue manager (that also runs on the same com-
puter) and the NAO robot. Initially, the main script
sends a command to NAO to calibrate its micro-
phones. The calibration process includes 4 seconds
of sampling the energy received by each microphone
at 10Hz, and the baseline is extracted by taking the
average of this value. Later on, the baseline is used
for determining whether a person has completed an
utterance.
When the calibration is completed, NAO greets
the user with predetermined greeting phrases and
speaking animations. Then, NAO starts listening to
the participant and simultaneously recording the par-
ticipant’s audio and video. The duration of the record-
ings is dynamic and based on the average microphone
energy of the environment, as previously mentioned.
Considering the computation time for emotion recog-
nition, the video frame rate can also be changed.
When the participant has completed an utterance, the
audio and video recordings are saved onto the NAO
computer. The main script in the computer running
DAISY then requests the saved audio and video us-
ing a secure copy protocol (SCP). After the computer
has retrieved the file, noise reduction is carried out on
the audio file to enhance the speech signal (Sainburg,
2019); (Sainburg et al., 2020). Next, the participant’s
speech is converted into text using the speech-to-text
model Whisper (Radford et al., 2022). The text is fed
into the DAISY dialogue manager, which then (after
processing) returns a response. NAO reads the mes-
sage from DAISY to the user using the Naoqi library,
which includes a text-to-speech function.
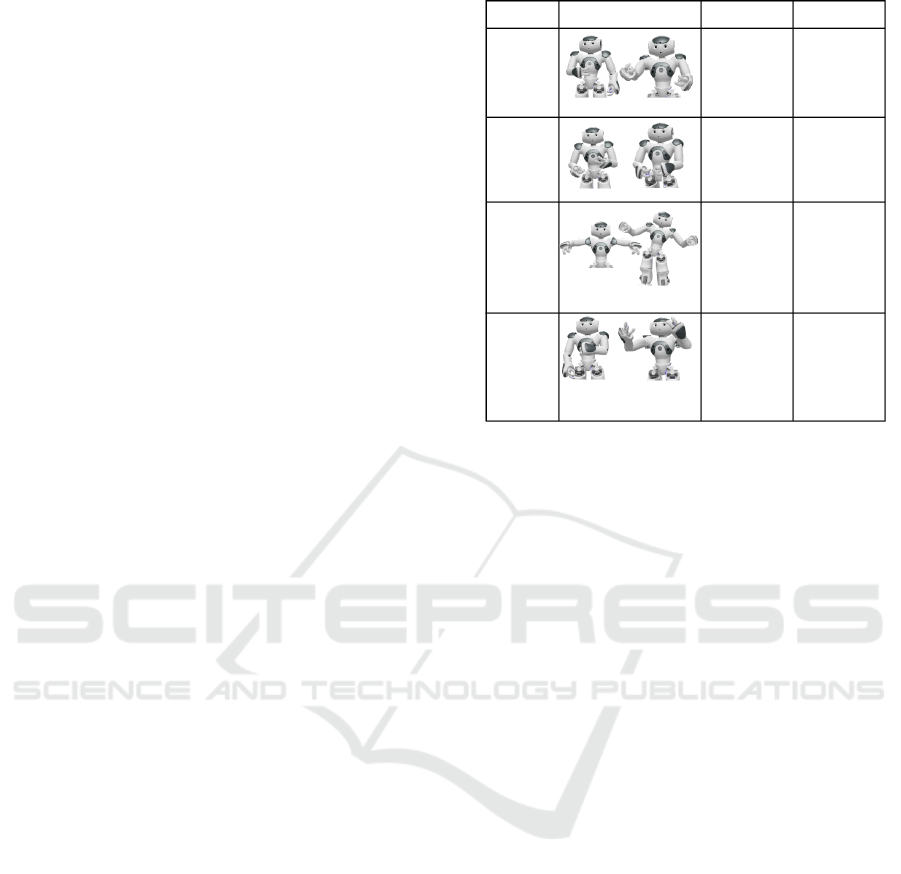
Interactions with robots are not purely speech-
based but can also use multimodal cues like gestures,
gaze, or facial expressions. Thus, NAO uses a related
tag based on the conversation stage. Tags are groups
of predetermined animations on NAO that indicate
certain gestures for specific circumstances, such as
comparison, confirmation, disappointment, etc. The
activity-specific behaviors of NAO used during the in-
teraction are given in Figure 3. The communication
between the user and DAISY via the NAO robot con-
tinues until the task at hand has been completed.
Stage Non-verbal Animated Say tags Verbal
Greeting
Confirmation
Activities
Appreciation
Self, Joy
Hello, Hi,
Greetings
Confirmation,
Affirmative
Understood,
Confirmed
Custom animations
Breakfast, Shower,
Rest, Wake up,
Physical exercises,
Sleep
Joy, Global Thank you
Waving hands Greeting user
Nodding Hand gestures
Exercise
movements
Thanking
gestures
Figure 3: Activity-specific gestures and behaviors.
3 EXPERIMENTS USING THE
DIALOGUE SYSTEM
The primary task of the study involved creating a
daily schedule for an elderly person, by a person who
is a non-expert using the NAO robot (and the dialogue
manager). The participants were asked to complete
an experiment of this kind for two different configu-
rations: (1) With DAISY only and (2) with DAISY
and the NAO robot.
Five different dialogues were generated. Each di-
alogue includes greeting, making a plan (one action
for morning, one action for noon, one action for after-
noon, and one action for evening) and, finally, saying
goodbye. Every participant carried out one randomly
assigned dialogue. An example dialogue is presented
below where P is the participant, and R is the NAO
robot.
• P: Hello.
• R: Hello doctor.
• P: I want to make a daily schedule for a patient.
• R: Yes certainly what is the name of the patient?
• P: Mister Duck.
• R: Ok schedule for Mister Duck in room 101
please provide the activities one by one.
• P: Wake-up at 6:00.
• R: Ok wake-up will take place at 6:00.
• P: Shower at 6:15.
• R: Ok shower at 6:15.
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
874

• P: He should have breakfast at 7.
• R: Understood changed the time for breakfast
from 7:30 to 7:00.
• P: After that he should have some light exercise at
8.
• R: Ok exercise will take place at 8.
• P: Nap at 10:00.
• R: Noted, nap will take place at 10:00.
• P: Lunch at 12:30.
• R: Ok lunch at 12.30.
• P: Then walk at 13.
• R: Confirmed walk is scheduled for 13.
• P: Dinner at 18:00.
• R: Confirmed dinner will take place at 18:00.
• P: Then he should go to bed at 21:00.
• R: Noted bedtime is scheduled for 21:00.
• P: Please repeat his entire schedule.
• R:. . . (Repeats the entire schedule)
• P: Done.
• R: Ok noted.
Note that, before the interaction starts, the robot
has been given information about the names of pa-
tients and the room number in which they reside. It
should also be noted that, in this example, a default
time for breakfast was set, at 07:30, but it is changed
by the user to 07:00, as can be seen in the dialogue
above. All the other events lacked a default value and
were thus added through the interaction above.
25 participants who were not included in the ini-
tial dialogue generation participated in the experi-
ments. The participants were university students aged
between 21 and 33 years. A cross-over evaluation
was done, meaning that half the attendees had ini-
tially communicated only with DAISY and generated
their schedule (Figure 4). Then, they were asked to
perform the exact same conversation with NAO and
DAISY together (Figure 5). The other half of the at-
tendees had this conversation with NAO first and then
with DAISY only.
In the literature, different subjective and objective
methods have been used to evaluate the performance
of dialogue managers. Detailed surveys can be found
in (Deriu et al., 2021; Reimann et al., 2024). User
studies have the advantage of allowing a review of the
performance of the dialogue manager and the robot in
a real interaction. Users can also provide their opin-
ions in questionnaires like the Godspeed question-
naire (Bartneck et al., 2009). In that way, user frus-
tration and other subjective measurements can also be
Figure 4: Experiment with DAISY.
Figure 5: Experiment with NAO.
included in the evaluation. The participant numbers
reported for user studies differ significantly, ranging
from 2 to 97, with an average of 21 participants (SD
18.4) (Reimann et al., 2024). Some papers report the
number of turns (Campos et al., 2018; Chai et al.,
2014), while some focus on the length of the turns
(Dino et al., 2019) or the total amount of time (Jo-
hansson and Skantze, 2015). In this study, the par-
ticipants were asked to provide an evaluation using
the System usability scale (SUS; see below) at the
end of the experiment with NAO and DAISY. SUS
has been widely used to evaluate subjective usabil-
ity (Lewis, 2012) and has been shown to detect dif-
ferences at smaller sample sizes than other question-
naires (Brooke, 2013).
SUS is a 10-item questionnaire (each question
with a Likert scale ranging from strongly agree to
strongly disagree) designed to measure the usability
of a system (Brooke, 1996). The possible ratings
were Strongly Disagree (1), Disagree (2), Neutral (3),
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users
875

Agree (4), and Strongly Agree (5). SUS is formulated
as a balanced survey consisting of 5 questions with
positive statements and 5 with negative statements,
with scores ranging from 0 to 100. The process for
computing a SUS score is as follows: i) subtract 1
from the user’s Likert ratings for odd-numbered items
or questions, ii) subtract the user’s Likert ratings from
5 for even-numbered items, so that each item score
will range from 0 to 4, and iii) sum the numbers and
multiply the total by 2.5, so that the calculation will
provide a range of possible SUS scores from 0 to 100.
4 RESULTS AND DISCUSSION
Starting with the primary task (generating a sched-
ule; see Section 3), the average completion time for
experiments involving DAISY only was 6.3 minutes,
whereas, for the case involving DAISY with NAO it
was 8.8 minutes. The longer duration of the exper-
iments involving NAO can be explained by the fact
that it takes some time for NAO to complete its ani-
mations. Furthermore, speech recognition in human-
robot interaction may be impacted by noise from the
robot’s motors and the environment in which the robot
is placed. The age, accent, and way of speaking
can vary. All of those factors can affect the per-
formance of the speech recognition module and may
cause some delay.
The SUS scores were 73.1 (for NAO + DAISY)
and 68.8 (DAISY only), indicating a higher usabil-
ity for the combined system. In the literature, a
threshold of around 68 is typically used (Sauro and
Lewis, 2016), putting the combined system comfort-
ably above the threshold, whereas DAISY alone is es-
sentially at the threshold.
The gender and age of the participants may also
play a role in the responses. As opposed to male users,
female users have been observed to prefer some non-
verbal behaviors in embodied agents (Kr
¨
amer et al.,
2010). In this case, however, we found that there was
no big difference between female and male partici-
pants (9 and 16 participants, respectively), with an
average SUS score of 72.2 (NAO) and 68.8 (DAISY)
for female respondents, and 73.6 (NAO) and 68.9
(DAISY) for male respondents. However, inspecting
the average SUS score of two different age groups
(16 participants aged 21-24, 9 participants aged 25-
33) showed that the older age group (25-33) had a
larger preference for the robot, average scores being
76.4 (NAO) and 66.7 (DAISY), while the scores of
the younger age group (21-24) did not exhibit a big
difference, 71.2 (NAO) and 70.0 (DAISY).
The participants were also asked if they preferred
to complete the task with only DAISY or with NAO
and DAISY combined. Additionally, they were asked
to provide reasons for their preferences. 18 partici-
pants (out of 25) preferred NAO. The robot was pre-
ferred because the participants found interaction with
a robot enjoyable and exciting. Furthermore, some
participants mentioned that they do not like writing
and thus appreciated that they were able to complete
the task just by talking. Some participants said that
it was enjoyable to talk to a robot. One participant
found the NAO robot to be cute and one participant
found NAO easy to communicate with. On the other
hand, seven participants preferred DAISY. These par-
ticipants mostly did not like interacting via speech
and were frustrated when NAO did not understand
their speech. The participants were not happy to re-
peat their statements a couple of times.
While the results of our investigation indicate a
preference for the setup involving the NAO robot, it
is important not to draw too far-reaching conclusions
based on a fairly small pool of participants solving a
single task. The results obtained are to be seen as a
first indication, rather than a definitive answer. An
obvious step for future work would be to expand the
number of participants and to study user preferences
in other tasks as well. Another possible avenue for
further work would be to compare user preferences
between, on the one hand, the DAISY and NAO setup
and, on the other hand, a setup involving DAISY
combined with an on-screen 3D-animated face (rather
than just the textual interface).
Regarding the secondary task mentioned in Sec-
tions 1 and 2.2, the aim was to see how much vari-
ation there is in a task-oriented setting, such as the
scenario presented in this paper. As mentioned ear-
lier, in DAISY, the user’s input is matched against a
set of predefined patterns that redirects the system to
do cognitive processing. By determining the degree
of variability, one can estimate the number of patterns
needed in order to handle the natural variations in the
user’s inputs.
For this task, 24 participants (different from the
participants in the NAO experiments) were asked to
manually create five variations of the dialogue sce-
nario (described in Section 3). From these dialogues,
each individual statement was inspected manually.
That is, the investigation involved statements that de-
scribe the same action but expressed with different
words. For example, the sentences I’m making a
schedule for Buzz and I am currently arranging Buzz’s
timetable use mostly different words to express the
same intent. In measuring the similarity between
statements, one can ignore variables such as, for in-
stance, Buzz in the previous example, which can be
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
876

replaced by another individual and still maintain the
same meaning from the perspective of DAISY. Differ-
ences in lexical choices, such as the choice of word
for an action (e.g., awaken as wake up, rise, get up,
etc.), can be handled by the linguistic KG in DAISY;
see Section 2.2, assuming that all the relevant entries
in this KG have been defined. Actions may also in-
clude placeholders to handle subjects within a phrasal
verb, for example, wake her up. Statements involv-
ing corrections or multiple answers are excluded from
this evaluation.
Statements can contain utterances that are not use-
ful from a task-oriented perspective (Oh, I almost for-
got to tell you, . . . or, She prefers to sleep a lit-
tle longer, so . . . ). One challenge for DAISY is to
detect and ignore these parts of the statement com-
pletely. Another challenge may be ambiguous state-
ments, where it is not clear what the speaker means,
such as the statement he needs to start the day quite
early, 7:15, where it is unclear whether the given time
refers to wake-up or some other undefined first task
of the day. For some statements, the dialogue man-
ager needs to do some additional cognitive process-
ing to determine the correct action, for example, in
the sentence he should eat at 12, the system needs
to set lunch in the schedule, even if it is not explic-
itly stated. Additionally, statements where the action
or time is referred to with a pronoun may pose chal-
lenges (e.g., At 12:00 he should be getting hungry so
serve lunch at that time).
While sentences of the kind just described exhibit
quite a bit of variation, we can conclude that, for the
remaining sentences (that form a majority), a single
pattern can indeed often cover most of the variation in
user statements. For example, for the statement that
sets the wake-up time, most participants appear to use
the structure of subject-verb-prepositional phrase (he
wakes up at 6) in their dialogues, where the verb spec-
ifies the action (wake up) and the prepositional phrase
describes the time (at 6). Variations in this struc-
ture include, for example, dropping the subject (wake
up at 6), using auxiliaries (he will wake up at 6), or
adding adverbial phrases (he usually wakes up at 6).
Still, these variations can be handled by DAISY using
a single pattern with optional structures included, as
described in Section 2.2.
Some variation requires more than just optional
parameters within the pattern, though. In certain
cases, the common structure of the statements is mod-
ified by moving the prepositional phrase before the
verb (at 6 he wakes up). This can be either handled by
adding a new pattern (essentially a modified version
of the previously mentioned pattern) or modifying the
existing pattern by allowing a flexible position of the
prepositional phrase within the pattern. In addition,
three more patterns were identified for this statement,
to handle (1) a structure with the action as the subject
and is as the verb (wake up is at 6), (2) using imper-
ative requests (set wake up at 6), and (3) the action
specified in a subordinate clause (let’s start by wak-
ing her up at 6:00). In all of these cases, patterns can
be defined, as discussed above, with optional slots to
handle the variability in the user’s statements.
The same patterns for one statement can be reused
for other statements. The most common pattern for
each statement varies; for example, for the state-
ment lunch is at 12, the most common pattern is still
the structure of subject-verb-prepositional phrase, but
with the action (in this case lunch) as the subject in-
stead of the verb of the sentence.
5 CONCLUSIONS
We have carried out user studies involving either a di-
alogue manager (DAISY) alone, or a NAO robot op-
erating together with the dialogue manager, applied in
a task that involved the definition of a daily schedule
for a patient. The main conclusion is that most partici-
pants have a preference for the setup that involves the
robot, possibly due to its pleasant visual appearance
and the fact that the interaction between the robot and
a user is verbal rather than textual.
We also studied the linguistic variability of
human-machine dialogue in the task described above.
Our findings show that, for the most part, the dialogue
can be handled with a rather limited set of patterns.
Thus, while the specification of patterns would be a
prohibitively complex task for general, unconstrained
human-robot interaction, we conclude that it is man-
ageable for task-oriented dialogue where a single pat-
tern (that allows for some variability) or a few such
patterns suffice to handle most user inputs. For fu-
ture work, this conclusion paves the way for applying
our DAISY dialogue manager in other task-oriented
settings.
ACKNOWLEDGEMENTS
This research was funded in part by the GENIE pro-
gramme at Chalmers University of Technology.
REFERENCES
Amirova, A., Rakhymbayeva, N., Yadollahi, E.,
Sandygulova, A., and Johal, W. (2021). 10 years of
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users
877

human-nao interaction research: A scoping review.
Frontiers In Robotics And AI, 8:744526.
Banaeian, H. and Gilanlioglu, I. (2021). Influence of the nao
robot as a teaching assistant on university students’
vocabulary learning and attitudes. Australasian Jour-
nal of Educational Technology, 37(3):71–87.
Baraka, K., Alves-Oliveira, P., and Ribeiro, T. (2020). An
extended framework for characterizing social robots.
Human-Robot Interaction: Evaluation Methods and
Their Standardization, pages 21–64.
Bartneck, C., Kuli
´
c, D., Croft, E., and Zoghbi, S. (2009).
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and per-
ceived safety of robots. International journal of social
robotics, 1:71–81.
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati,
B., and Tanaka, F. (2018). Social robots for education:
A review. Science robotics, 3(21):eaat5954.
Breazeal, C., Dautenhahn, K., and Kanda, T. (2016). Social
robotics. Springer handbook of robotics, pages 1935–
1972.
Broekens, J., Heerink, M., Rosendal, H., et al. (2009). As-
sistive social robots in elderly care: a review. Geron-
technology, 8(2):94–103.
Brooke, J. (1996). SUS: A “quick and dirty” usability scale.
Usability Evaluation in INdustry/Taylor and Francis.
Brooke, J. (2013). SUS: a retrospective. Journal of usability
studies, 8(2).
Campos, J., Kennedy, J., and Lehman, J. F. (2018). Chal-
lenges in exploiting conversational memory in human-
agent interaction. In Proceedings of the 17th Interna-
tional Conference on Autonomous Agents and Multi-
Agent Systems, pages 1649–1657.
Chai, J. Y., She, L., Fang, R., Ottarson, S., Littley, C., Liu,
C., and Hanson, K. (2014). Collaborative effort to-
wards common ground in situated human-robot dia-
logue. In Proceedings of the 2014 ACM/IEEE interna-
tional conference on Human-robot interaction, pages
33–40.
Coghlan, S., Leins, K., Sheldrick, S., Cheong, M., Gooding,
P., and D’Alfonso, S. (2023). To chat or bot to chat:
Ethical issues with using chatbots in mental health.
Digital health, 9:20552076231183542.
Deriu, J., Rodrigo, A., Otegi, A., Echegoyen, G., Rosset,
S., Agirre, E., and Cieliebak, M. (2021). Survey on
evaluation methods for dialogue systems. Artificial
Intelligence Review, 54:755–810.
Dino, F., Zandie, R., Abdollahi, H., Schoeder, S., and
Mahoor, M. H. (2019). Delivering cognitive behav-
ioral therapy using a conversational social robot. In
2019 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 2089–2095.
IEEE.
Fong, T., Nourbakhsh, I., and Dautenhahn, K. (2003). A
survey of socially interactive robots: Concepts, de-
sign, and applications. Robotics and autonomous sys-
tems, 42:3–4.
Johansson, M. and Skantze, G. (2015). Opportunities and
obligations to take turns in collaborative multi-party
human-robot interaction. In Proceedings of the 16th
Annual Meeting of the Special Interest Group on Dis-
course and Dialogue, pages 305–314.
Kr
¨
amer, N. C., Hoffmann, L., and Kopp, S. (2010). Know
your users! empirical results for tailoring an agent s
nonverbal behavior to different user groups. In Intel-
ligent Virtual Agents: 10th International Conference,
IVA 2010, Philadelphia, PA, USA, September 20-22,
2010. Proceedings 10, pages 468–474. Springer.
Lemaignan, S., Jacq, A., Hood, D., Garcia, F., Paiva, A.,
and Dillenbourg, P. (2016). Learning by teaching a
robot: The case of handwriting. IEEE Robotics & Au-
tomation Magazine, 23(2):56–66.
Lewis, J. R. (2012). Usability testing. Handbook of human
factors and ergonomics, pages 1267–1312.
Lewis, P., Perez, E., Piktus, A., Petroni, F., Karpukhin,
V., Goyal, N., K
¨
uttler, H., Lewis, M., Yih, W.-t.,
Rockt
¨
aschel, T., et al. (2020). Retrieval-augmented
generation for knowledge-intensive NLP tasks. Ad-
vances in Neural Information Processing Systems,
33:9459–9474.
Namlisesli, D., Bas¸, H. N., Bostancı, H., Cos¸kun, B.,
Barkana, D. E., and Tarakc¸ı, D. (2024). The effect of
use of social robot nao on children’s motivation and
emotional states in special education. In 2024 21st
International Conference on Ubiquitous Robots (UR),
pages 7–12. IEEE.
OpenAI (2023). GPT-4 technical report (arxiv:
2303.08774).
Pino, O., Palestra, G., Trevino, R., and De Carolis, B.
(2020). The humanoid robot nao as trainer in a mem-
ory program for elderly people with mild cognitive
impairment. International Journal of Social Robotics,
12:21–33.
Pulido, J. C., Gonz
´
alez, J. C., Su
´
arez-Mej
´
ıas, C., Bandera,
A., Bustos, P., and Fern
´
andez, F. (2017). Evaluating
the child–robot interaction of the naotherapist plat-
form in pediatric rehabilitation. International Journal
of Social Robotics, 9:343–358.
Radford, A., Kim, J. W., Xu, T., Brockman, G., McLeavey,
C., and Sutskever, I. (2022). Robust speech recogni-
tion via large-scale weak supervision.
Reimann, M. M., Kunneman, F. A., Oertel, C., and Hin-
driks, K. V. (2024). A survey on dialogue manage-
ment in human-robot interaction. ACM Transactions
on Human-Robot Interaction.
Rudin, C. (2019). Stop explaining black box machine learn-
ing models for high stakes decisions and use inter-
pretable models instead. Nature machine intelligence,
1(5):206–215.
Sainburg, T. (2019). timsainb/noisereduce: v1.0.
Sainburg, T., Thielk, M., and Gentner, T. Q. (2020).
Finding, visualizing, and quantifying latent structure
across diverse animal vocal repertoires. PLoS compu-
tational biology, 16(10):e1008228.
Sauro, J. and Lewis, J. R. (2016). Quantifying the user expe-
rience: Practical statistics for user research. Morgan
Kaufmann.
Si, W. M., Backes, M., Blackburn, J., De Cristofaro, E.,
Stringhini, G., Zannettou, S., and Zhang, Y. (2022).
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
878

Why so toxic? measuring and triggering toxic be-
havior in open-domain chatbots. In Proceedings of
the 2022 ACM SIGSAC Conference on Computer and
Communications Security, pages 2659–2673.
Tanaka, F. and Matsuzoe, S. (2012). Children teach a care-
receiving robot to promote their learning: field ex-
periments in a classroom for vocabulary learning. J.
Hum.-Robot Interact., 1(1):78–95.
Touvron, H., Martin, L., Stone, K., Albert, P., Almahairi,
A., Babaei, Y., Bashlykov, N., Batra, S., Bhargava,
P., Bhosale, S., Bikel, D., Blecher, L., Ferrer, C. C.,
Chen, M., Cucurull, G., Esiobu, D., Fernandes, J., Fu,
J., Fu, W., Fuller, B., Gao, C., Goswami, V., Goyal,
N., Hartshorn, A., Hosseini, S., Hou, R., Inan, H.,
Kardas, M., Kerkez, V., Khabsa, M., Kloumann, I.,
Korenev, A., Koura, P. S., Lachaux, M.-A., Lavril, T.,
Lee, J., Liskovich, D., Lu, Y., Mao, Y., Martinet, X.,
Mihaylov, T., Mishra, P., Molybog, I., Nie, Y., Poul-
ton, A., Reizenstein, J., Rungta, R., Saladi, K., Schel-
ten, A., Silva, R., Smith, E. M., Subramanian, R.,
Tan, X. E., Tang, B., Taylor, R., Williams, A., Kuan,
J. X., Xu, P., Yan, Z., Zarov, I., Zhang, Y., Fan, A.,
Kambadur, M., Narang, S., Rodriguez, A., Stojnic, R.,
Edunov, S., and Scialom, T. (2023). Llama 2: Open
foundation and fine-tuned chat models.
Wahde, M. (2024). Models with verbally enunciated expla-
nations: Towards safe, accountable, and trustworthy
artificial intelligence. In ICAART, pages 101–108.
Wahde, M. and Virgolin, M. (2023). DAISY: An imple-
mentation of five core principles for transparent and
accountable conversational ai. International Journal
of Human–Computer Interaction, 39(9):1856–1873.
Youssef, K., Said, S., Alkork, S., and Beyrouthy, T.
(2022). A survey on recent advances in social
robotics. Robotics, 11(4):75.
Interactive Problem-Solving with Humanoid Robots and Non-Expert Users
879
