
Image Compositing Is all You Need for Data Augmentation
Ang Jia Ning Shermaine
1
, Michalis Lazarou
2
and Tania Stathaki
1
1
Imperial College London, U.K.
2
University of Surrey, U.K.
Keywords:
Data Augmentation, Image Classification, Generative Modelling, Stable Diffusion, ControlNet.
Abstract:
This paper investigates the impact of various data augmentation techniques on the performance of object
detection models. Specifically, we explore classical augmentation methods, image compositing, and advanced
generative models such as Stable Diffusion XL and ControlNet. The objective of this work is to enhance model
robustness and improve detection accuracy, particularly when working with limited annotated data. Using
YOLOv8, we fine-tune the model on a custom dataset consisting of commercial and military aircraft, applying
different augmentation strategies. Our experiments show that image compositing offers the highest improvement
in detection performance, as measured by precision, recall, and mean Average Precision (mAP@0.50). Other
methods, including Stable Diffusion XL and ControlNet, also demonstrate significant gains, highlighting
the potential of advanced data augmentation techniques for object detection tasks. The results underline
the importance of dataset diversity and augmentation in achieving better generalization and performance in
real-world applications. Future work will explore the integration of semi-supervised learning methods and
further optimizations to enhance model performance across larger and more complex datasets.
1 INTRODUCTION
Deep learning models, particularly Convolutional Neu-
ral Networks (CNNs) have revolutionized the field
of computer vision, achieving state-of-the-art perfor-
mance on a wide range of tasks, including image clas-
sification and object detection. However, the perfor-
mance of these models is heavily reliant on the avail-
ability of large, high-quality datasets. In many real-
world scenarios, obtaining sufficient training data can
be challenging, especially for specific domains or rare
classes.
To address this limitation, data augmentation has
been shown to produce promising ways to increase
the accuracy of classification tasks, to artificially ex-
pand training datasets. Previous research has explored
various data augmentation techniques such as tradi-
tional methods, such as rotation, flipping, and crop-
ping (Perez and Wang, 2017), and generative adver-
sarial networks (GANs) to generate synthetic images
(Mikołajczyk and Grochowski, 2018). Some other
works have changed images’ semantics using an off-
the-shelf diffusion model, which generalizes to novel
visual concepts from a few labeled examples (Tra-
bucco et al., 2023), another study has used Multi-stage
Augmented Mixup (MiAMix), which integrates image
augmentation into the mixup framework, utilizes mul-
tiple diversified mixing methods concurrently, and im-
proves the mixing method by randomly selecting mix-
ing mask augmentation methods (Liang et al., 2023).
One specific area that faces the challenge of scarce
labeled data is aircraft detection. Accurate and timely
identification of aircraft is crucial in various sectors,
including airspace security, airport traffic management,
and military applications (Sumari, 2009).
In this paper, we propose a novel data augmen-
tation method for this application that combines ele-
ments from multiple images to create a new, synthetic
image, which we will refer to as Image Compositing.
Impressively, we show that our method outperforms
other complex generative model techniques such as
multi-modal diffusion models (Rombach et al., 2021).
2 RELATED WORK
Data augmentation and synthetic data generation have
emerged as powerful techniques to enhance the perfor-
mance and robustness of deep learning models, partic-
ularly in scenarios with limited data.
2.1 Data Augmentation Methods
Data augmentation techniques have been widely em-
ployed to enhance the performance and generalization
of deep learning models, especially in scenarios with
Shermaine, A. J. N., Lazarou, M. and Stathaki, T.
Image Compositing Is all You Need for Data Augmentation.
DOI: 10.5220/0013370300003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
789-796
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
789

limited data. Traditional methods, such as geomet-
ric transformations (e.g., random cropping, flipping,
rotation) and colour jittering, have been effective in
improving model robustness (Shijie et al., 2017).
Recent advancements in data augmentation have fo-
cused on more sophisticated techniques. For instance,
RICAP (Takahashi et al., 2020) randomly crops and
patches images to create new training examples, while
also mixing class labels to introduce soft label learning.
This approach has shown promising results in various
computer vision tasks.
To address the issue of colour variations between
different cameras, a novel approach has been proposed
to map colour values using deep learning (Puttaruksa
and Taeprasartsit, 2018). By learning colour-mapping
parameters, this technique enables the augmentation
of colour data by converting images from one camera
to another, effectively expanding the training dataset.
Another recent technique, SmoothMix, addresses
the limitations of existing regional dropout-based data
augmentation methods (Lee et al., 2020). By blending
images based on soft edges and computing correspond-
ing labels, SmoothMix minimizes the "strong-edge"
problem and improves model performance and robust-
ness against image corruption.
In the domain of hyperspectral image (HSI) denois-
ing, data augmentation has been less explored. A new
method called PatchMask has been proposed to aug-
ment HSI data while preserving spatial and spectral
information (Dou et al., 2022). By creating diverse
training samples that lie between clear and noisy im-
ages, PatchMask can enhance the effectiveness of HSI
denoising models.
Recent advancements in attention mechanisms
have enabled more effective data augmentation tech-
niques. Attentive CutMix (Walawalkar et al., 2020) is
a novel method that leverages attention maps to iden-
tify the most discriminative regions within an image,
and then selectively applies cut-mix operations to these
regions. This targeted approach can lead to significant
improvements in model performance.
2.2 Synthetic Data Generation Methods
Synthetic data generation has emerged as a powerful
technique to address data scarcity and domain shift
challenges in various domains. By generating real-
istic synthetic data, models can be trained on larger
and more diverse datasets, leading to improved perfor-
mance.
Generative Adverserial Networks (GANs) have
gained widespread popularity for their ability to pro-
duce high-quality synthetic data by training a gener-
ator to create realistic samples while a discriminator
distinguishes between real and generated data. Their
versatility has been demonstrated across domains such
as image synthesis (Wu et al., 2022) and industrial
object detection (Hu et al., 2023). However, GANs
can be challenging to train and often suffer from mode
collapse, where the generator fails to capture the full
diversity of the data distribution.
Variational Autoencoders (VAEs) learn a latent rep-
resentation of the data distribution and can generate
new data points by sampling from this latent space.
VAEs are more stable to train than GANs, but they of-
ten produce lower-quality samples, especially for com-
plex data distributions. VAEs have been applied to var-
ious tasks, including image generation, anomaly detec-
tion, and data augmentation. For example, VAEs have
been used to generate synthetic medical images for
training medical image segmentation models (Akkem
et al., 2024) and to synthesize semantically rich images
for geospatial applications (Xiao et al., 2020).
Vector Quantised-Variational Autoencoders (VQ-
VAEs) enhance the capabilities of VAEs by introducing
a discrete latent code, making it more efficient and in-
terpretable. VQ-VAEs have been shown to be effective
in generating high-quality images and can be used as
a building block for more complex generative models.
VQ-VAEs have been applied to various tasks, includ-
ing image compression, image generation, and video
prediction. For example, VQ-VAEs have been used to
generate synthetic data for human activity recognition
(HAR) with complex multi-sensor inputs (Lafontaine
et al., 2024).
Diffusion models gradually denoise a random noise
vector to generate realistic data samples. Recent work,
such as (Ho et al., 2020), has shown that diffusion mod-
els can achieve state-of-the-art results in image gener-
ation. Diffusion models have been applied to various
tasks, including image generation, image restoration,
and text-to-image generation. Latent diffusion models
(LDMs) (Rombach et al., 2022) enhance efficiency by
operating in a compressed latent space, significantly
reducing computational costs.
3 BACKGROUND
3.1 Data Collection
While existing datasets like FGVC-Aircraft provide
valuable resources for aircraft recognition, they pri-
marily focus on aircraft images captured from aerial
perspectives, which do not align with the specific re-
quirements of ground-based aircraft detection. To ad-
dress this limitation, we adopted a novel data curation
strategy involving a multi-step process.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
790

Table 1: Baseline Dataset Split.
Class Training Validation Test
Commercial 218 62 36
Military 22 9 6
We meticulously sourced images from various on-
line platforms, including stock photo websites and
aviation enthusiast forums such as JetPhotos. This
approach allowed us to gather a diverse collection of
images capturing aircraft in various scenarios, with a
specific focus on ground-based perspectives.
To efficiently label the large dataset, we employed
a semi-automated approach leveraging the Grounding
DINO model using Roboflow. This model was trained
on a large-scale image-text dataset and can accurately
localize objects in images given textual prompts. By
providing a prompt such as "plane", the model was
able to generate initial bounding box proposals.
However, to ensure high-quality annotations, each
image with proposed bounding boxes was then care-
fully examined. Incorrect or missed detections were
corrected, and additional annotations were added as
needed. The final dataset split can be seen in Table 1.
The following sections will first explore the base-
line augmentation techniques – classical data augmen-
tion Stable Diffusion and its extension, ControlNet.
Building upon these foundations, we will then intro-
duce a novel method for data augmentation: Image
Compositing.
3.2 Baselines Methods
Classical Data Augmentation These methods used
were horizontal flipping, Gaussian blurring and expo-
sure adjustment. Horizontal flipping was applied to
introduce spatial variability. This technique mirrors
the image along the vertical axis, effectively doubling
the dataset size without altering the underlying seman-
tic content. Gaussian blurring introduces a controlled
level of noise and blurring, mimicking the effects of
atmospheric conditions or sensor noise. Additionally,
exposure adjustment was employed to vary the overall
intensity of the image, simulating changes in illumina-
tion.
Stable Diffusion XL. Stable Diffusion XL is a state-
of-the-art text-to-image model capable of generating
highly realistic and detailed images from textual de-
scriptions (Podell et al., ). We provided specific
prompts, such as "A photo of a military plane in sky,
taken from the ground" or "A photo of a commer-
cial plane in sky, taken from the ground," as well as
negative prompts such as "cropped, close-up, low res-
olution, blurred, partial view, cut-off edges," to ensure
they met our specific requirements. The generated im-
ages were then labeled using the approach in section
3.1.
Stable Diffusion XL with ControlNet. We had pro-
vided the Stable Diffusion XL model with a guidance
image to influence its output, ensuring that the gen-
erated images were consistent with the desired char-
acteristics. This was carried out using the recently
published model of ControlNet (Zhang et al., 2023).
The idea of ControlNet is to to use a conditioning input
such as a segmentation maps, Canny edges and depth
maps that can be used to control the generated image.
In our work we utilized Canny edges as the condition-
ing input for the ControlNet. We used a subset of the
training images and obtained their Canny edge images
by applying Canny edge detection. Then we feed these
Canny edge images as input to the network and in a
similar way to section 3.2 we provided a prompt that
will generate a plane. Our hypothesis is that using the
Canny edges and the ControlNet will force the Stable
Diffusion XL model to generate plane exactly in the
same location as the original input images. In this
way we will be able to use the original bounding box
information to fine-tune our plane detector.
3.3 Image Compositing
Image fusion techniques were employed, which in-
volved background removal, sky integration and seam
reduction, illustrated in Figure 1. Background ele-
ments were firstly removed from images containing an
aircraft, isolating the foreground object — the aircraft.
The foreground aircraft objects were then integrated
onto sky background images captured from a ground
perspective. The foreground aircraft was then rotated
by an angle between
0
◦
to
10
◦
and flipped horizontally,
increasing robustness of training data. To enhance
image realism, Gaussian filtering was applied to blur
the boundaries between the foreground aircraft and the
background sky, minimising visible seams.
Gaussian Filtering. An image processing technique
employed for noise reduction and image smoothing.
This is accomplished by applying a filter kernel whose
weights are defined by a Gaussian function. This func-
tion is a bell-shaped curve that assigns higher weights
to pixels closer to the center and progressively lower
weights to those further away.
The Gaussian filter is applied to an image by con-
volving the Gaussian kernel with the image.
Image Compositing Is all You Need for Data Augmentation
791

Figure 1: Data Generation Using Image Composition.
4 METHODOLOGY
4.1 Problem Definition
We define a labeled baseline image dataset
D
base
=
(
x
i
,
y
i
)
, where x
i
represents the
i
th
image and y
i
repre-
sents the corresponding class label of image x
i
. This
dataset comprises images of commercial and mili-
tary planes. The dataset is partitioned into three
splits: the training set split,
D
train
= (x
i
, y
i
)
, the val-
idation set split,
D
val
= (x
i
, y
i
)
and testing set split,
D
test
= (x
i
, y
i
).
We use
D
train
to train a neural network,
that consists of a backbone
f
θ
and a classifier
g
φ
(last
layer of the network).
The validation set
D
val
is used in order to save the
model with the highest validation accuracy. Finally,
we use
D
test
to calculate the test set classification
accuracy.
4.2 Training Phase
In each batch, we use training images along with corre-
sponding annotations. Let
D = {
x
i
,
y
i
}
N
i=1
denote the
dataset, where x
i
represents the input image, and y
i
represents the corresponding annotations.
During the forward pass, the model predicts ˆy
i
for
each input x
i
. The prediction
ˆy
i
includes the bounding
box coordinates, class probabilities, and objectness
score.
The total loss,
L
total
, is calculated for each batch
as:
L
total
= L
obj
+ L
cls
+ L
bbox
, (1)
where:
• L
obj
is the objectness loss.
• L
cls
is the classification loss.
• L
bbox
is the bounding box regression loss.
The weights of the network, W, are updated using
the Adam optimizer:
W
t+1
= W
t
− η∇L
total
, (2)
where η is the learning rate.
Early stopping is employed to halt training if the
validation loss does not improve for
p
consecutive
epochs (patience
p = 10
). The training process is
summarized in Algorithm 1.
Algorithm 1: YOLOv8 Training Process.
Data:
Dataset
D
, configuration file
data.yaml
,
pre-trained model yolov8s. pt, number
of epochs E = 500, patience P = 10
Result: Trained model with updated weights
1 Initialize model with pre-trained weights
yolov8s. pt;
2 Set training parameters: batch_size = 16,
epochs = 500, learning_rate = 0.001667,
optimizer = AdamW;
3 Set data configuration file path: data.yaml;
4 for epoch ← 1 to E do
5 for each batch B in the training set D do
6 Perform forward pass on batch B;
7 Calculate loss using classification,
localization, and confidence
components;
8 Perform backward pass and update
model weights using AdamW
optimizer;
9
Calculate validation loss on validation set;
10 if validation loss does not improve for P
epochs then
11 Save the model with the lowest
validation loss;
12 Break;
13 Return the trained model with optimized
weights;
4.3 Inference Stage
During the inference stage, the model processes each
test image x
i
from the test dataset
D
test
= {
x
j
}
M
j=1
to predict the class labels and bounding boxes. The
predicted class label
ˆ
y
i
for each detected object is
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
792

derived as:
ˆ
y
i
= arg max
k∈[C]
ˆp
ik
, (3)
where
ˆp
ik
is the predicted probability for class
k
, and
C is the total number of classes.
The bounding box predictions are represented as
ˆ
b
i
= ( ˆx
i
, ˆy
i
, ˆw
i
,
ˆ
h
i
)
, where
ˆx
i
and
ˆy
i
denote the center
coordinates of the bounding box, and
ˆw
i
and
ˆ
h
i
are its
width and height. The model leverages anchor-free
mechanisms to predict these bounding boxes directly
at specific feature map locations, reducing the reliance
on predefined anchor boxes. The bounding boxes are
computed through the regression head of the network,
which predicts the normalized offsets for each feature
map grid cell corresponding to the detected objects.
To refine the predictions, the model applies post-
processing techniques such as non-maximum suppres-
sion (NMS) to eliminate redundant bounding boxes
and retain only the most confident detections. This is
mathematically expressed as:
ˆ
b
i
= NMS({b
i j
}
N
j=1
, { ˆp
i j
}
N
j=1
, τ), (4)
where
{
b
i j
}
N
j=1
and
{ ˆp
i j
}
N
j=1
are the sets of predicted
bounding boxes and their associated confidence scores
for image x
i
, and
τ
is the IoU threshold used to filter
overlapping boxes.
To evaluate the model’s performance, we utilize
three key metrics:
Mean Average Precision at IoU 0.50 (mAP@0.50).
This metric evaluates the overall detection perfor-
mance by calculating the average precision across
all classes for a fixed Intersection-over-Union (IoU)
threshold of 0.50.
Precision. Defined as the ratio of true positive detec-
tions to the sum of true positives and false positives.
It measures how many of the predicted detections are
relevant.
Recall. Defined as the ratio of true positive detec-
tions to the total number of ground-truth instances. It
measures the model’s ability to detect relevant objects.
These metrics collectively provide a comprehen-
sive evaluation of the model’s performance, capturing
its precision, completeness, and overall detection ca-
pability.
Table 2: Augmented Dataset Split.
Class Training Validation Test
Commercial 307 73 36
Military 338 43 6
5 EXPERIMENTS
5.1 Setup
Datasets. The final augmented dataset can be seen
in Table 2.
Network. In our work, we had used YOLOv8 and
had fine-tuned for our custom datasets. YOLOv8 em-
ploys pretrained backbones such as CSPDarknet53.
These pretrained weights, W
pretrained
, initialize the
model to improve convergence.
Implementation Details. Our implementation is
based on Python. We utilized the Ultralytics YOLOv8
framework for model training and inference, with Py-
Torch serving as the underlying deep learning library
for GPU-accelerated computations. For image aug-
mentation and preprocessing tasks, OpenCV, NumPy,
diffusers and transformers libraries.
Hyperparameters. In the experiment, the batch size
is implicitly set by the available GPU memory, but it
typically defaults to 16 for optimal performance. The
model was trained for 500 epochs, with early stopping
enabled by setting the patience to 10. The AdamW op-
timizer was used, with a learning rate of 0.001667 and
momentum of 0.9. The optimizer was configured with
parameter groups, where different decay rates were
applied to various parts of the model. Specifically, the
weight decay for the first group of parameters was set
to 0.0 (no weight decay), while for the second group
(weights), the decay was set to 0.0005. The third group
(bias parameters) had a weight decay of 0.0, ensuring
that bias terms did not undergo regularization. The
loss function employed is a combination of objectness,
classification, and bounding box regression losses, tai-
lored for object detection tasks. We use the validation
set to calculate the validation accuracy and save the
model with the highest validation accuracy through
comparisons at each epoch. The performance of the
model is monitored using metrics such as mean Aver-
age Precision (mAP), precision, and recall, which are
calculated at each epoch to track the model’s detection
accuracy on the test set.
Image Compositing Is all You Need for Data Augmentation
793
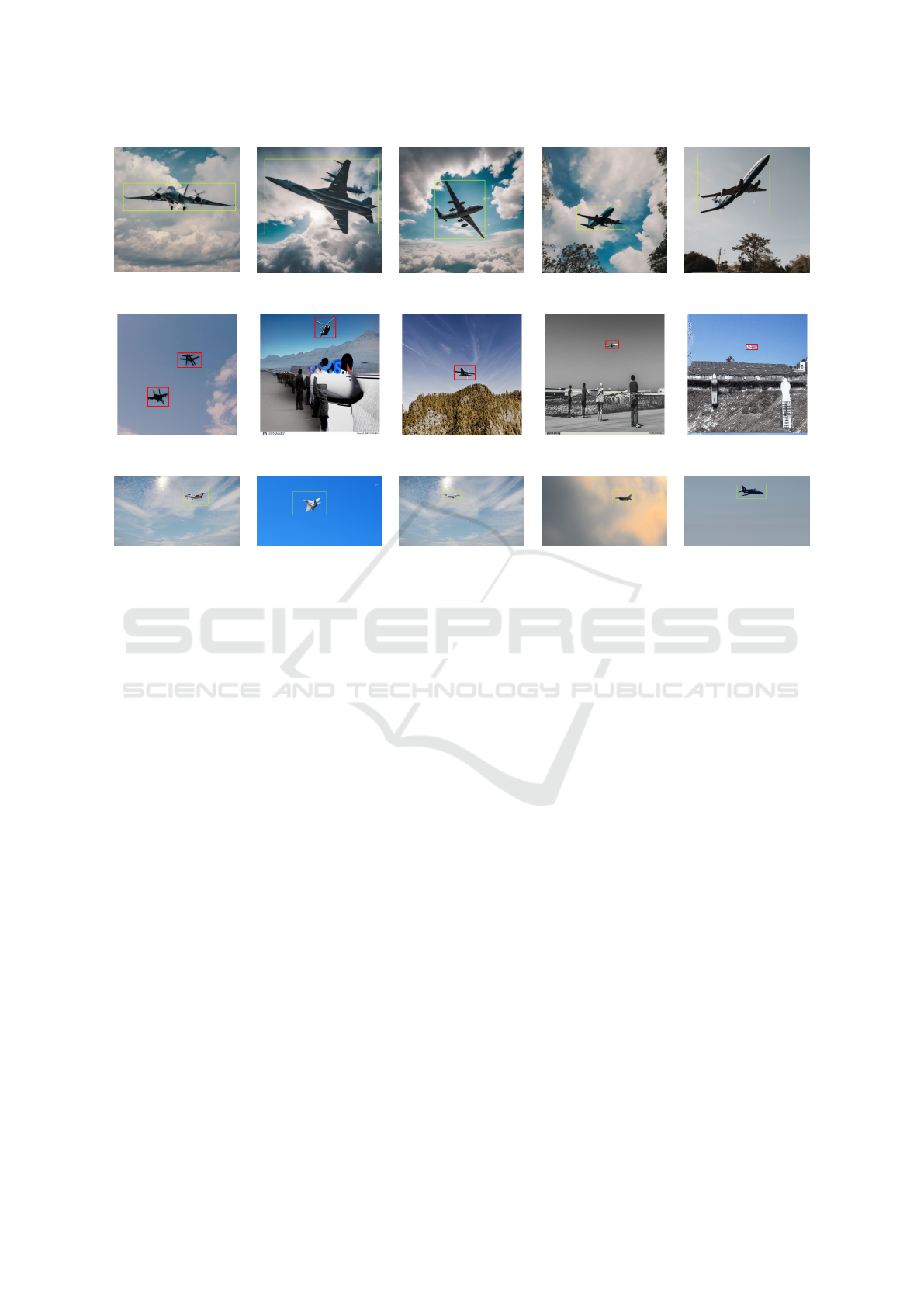
Generated Images from Stable Diffusion + ControlNet
Generated Images from Image Composition
Generated Images from Stable Diffusion XL
Figure 2: Images Generated using Different Methods.
5.2 Ablation Study
In this study, we conducted a series of experiments to
evaluate the impact of different data augmentation tech-
niques on model performance. For each dataset, we
applied a distinct augmentation method and compared
it to the baseline, which involved training the model
on the original unmodified data without any augmenta-
tion. The performance of each approach was assessed
using mAP@0.50, precision, and recall. These met-
rics were calculated for each augmented dataset and
presented in a comparative manner in Table 3.
5.3 Performance Comparison
Table 3 provides a quantitative comparison of preci-
sion, recall, and mAP@0.50 metrics across different
data augmentation techniques. The baseline model,
trained on the original dataset without augmentation,
showed moderate performance with an mAP@0.50 of
0.654. In contrast, classical data augmentation tech-
niques such as flipping and blurring significantly im-
proved performance, achieving an mAP@0.821. The
proposed Image Compositing method outperformed
all other techniques, with the highest mAP@0.911,
precision of 0.904, and recall of 0.907. Figure 2 vi-
sually supports these findings by showcasing sample
images generated through each augmentation method.
The superior performance of Image Compositing when
compared to advanced generative models like Stable
Diffusion can be attributed to the distribution shift be-
tween the source images and the images generated
by Stable Diffusion. This shift is evident in Figure 2,
particularly in the first row, where the airplanes in the
images generated by Stable Diffusion noticeably differ
from the airplanes in our dataset.
Figure 3 visually corroborates the quantitative re-
sults presented in Table 3. The baseline model exhibits
a high number of missed detections and incorrect la-
beling, resulting in a low precision score as shown in
Table 3. The classical augmentation method showed an
improvement over the baseline, with a notable increase
in detection accuracy. However, some aircraft remain
undetected, aligning with the higher recall score com-
pared to the original dataset.
Image compositing gives the best results with ac-
curate and confident bounding box predictions for all
aircraft. The model effectively handles cluttered back-
grounds and distant objects, which is consistent with
the scores in Table 3. While showcasing improved per-
formance over the original dataset, the model trained
with Stable Diffusion showed some inconsistencies in
the bounding box predictions, aligning with its scores
which are higher than the baseline but lower than Im-
age Compositing. Stable Diffusion + ControlNet has
a balance between precision and recall, but still falls
slightly short of the performance achieved by Image
Compositing, as evidenced by the scores in Table 3.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
794
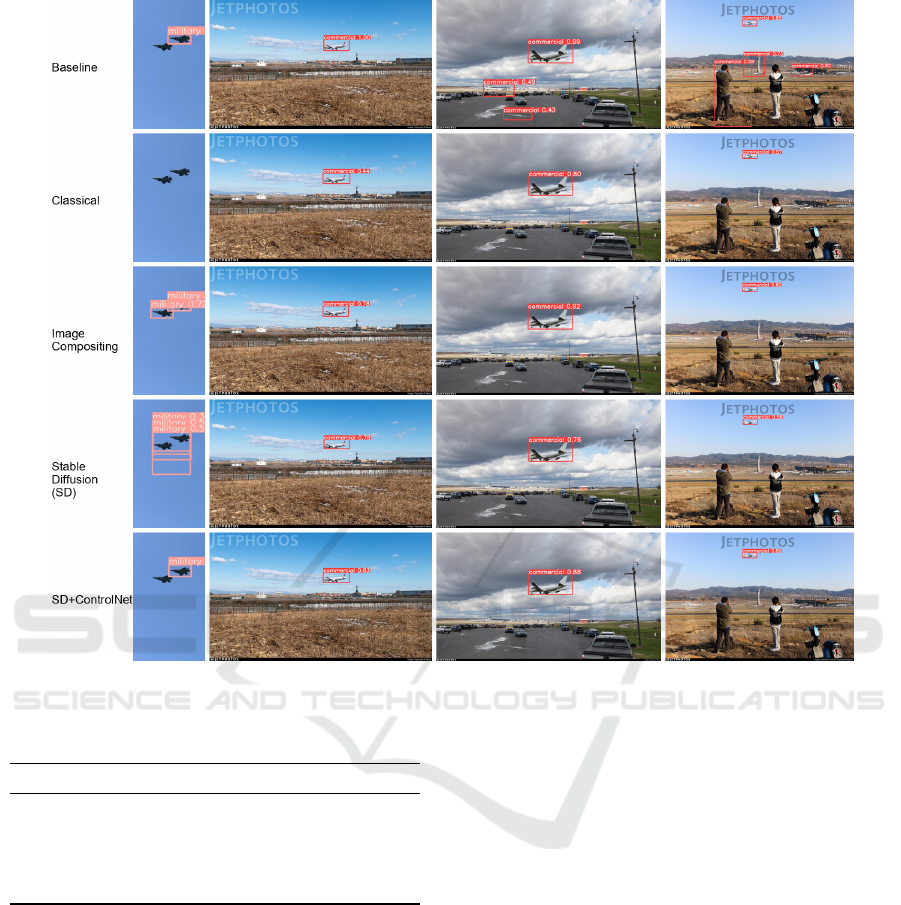
Figure 3: Prediction Results for Each Augmented Dataset.
Table 3: Performance Comparison of Different Augmenta-
tion Methods.
Method Precision Recall mAP50 Epoch
Original 0.558 0.699 0.654 2
Classical 0.856 0.794 0.821 28
Image Compositing 0.904 0.907 0.911 32
Stable Diffusion (SD) 0.718 0.809 0.808 25
SD+ControlNet 0.874 0.703 0.854 37
5.4 Verification of Hypotheses
The experiments were designed to validate that ad-
vanced augmentation methods, including generative
models, would improve object detection performance
over classical methods and that Image Compositing,
as a novel augmentation strategy, would outperform
state-of-the-art generative models in both precision
and recall.
The results supported both hypotheses. Stable
Diffusion XL and Stable Diffusion XL with Con-
trolNet demonstrated significant performance gains
(mAP@0.808 and mAP@0.854, respectively) over the
baseline model, confirming the effectiveness of ad-
vanced augmentation methods. Moreover, the superior
performance of Image Compositing across all metrics
validated its position as the most effective augmenta-
tion method tested.
6 CONCLUSION
In this research, we proposed a comprehensive frame-
work for improving object detection performance us-
ing various data augmentation techniques. Our ap-
proach leverages a combination of classical augmenta-
tion methods, image compositing, and advanced mod-
els like Stable Diffusion XL and ControlNet to aug-
ment the dataset. By augmenting the dataset in differ-
ent ways, we were able to improve model robustness
and generalization, addressing the challenges of lim-
ited annotated data in object detection tasks.
Through rigorous experiments on a custom dataset
involving both commercial and military aircraft, we
demonstrated that different augmentation techniques
provide varying degrees of improvement in detec-
tion accuracy, as measured by precision, recall, and
Image Compositing Is all You Need for Data Augmentation
795

mAP@0.50. Among the methods evaluated, image
compositing stood out as the most effective in terms
of performance, achieving the highest precision and
recall scores, as well as the best mAP.
Our results validate the hypothesis that data aug-
mentation can significantly enhance the performance
of object detection models, even in the presence of
complex and imbalanced datasets. Moving forward,
we plan to further refine and optimize the augmen-
tation strategies, combining them with cutting-edge
techniques such as generative adversarial networks
and semi-supervised learning methods. Additionally,
extending our approach to larger datasets and applying
it across other domains, such as autonomous vehicles
and medical imaging, presents an exciting direction for
future work. Our ultimate goal is to continue advanc-
ing the state-of-the-art in object detection, improving
both model accuracy and computational efficiency.
REFERENCES
Akkem, Y., Biswas, S. K., and Varanasi, A. (2024). A com-
prehensive review of synthetic data generation in smart
farming by using variational autoencoder and genera-
tive adversarial network. Engineering Applications of
Artificial Intelligence, 131:107881.
Dou, H.-X., Lu, X.-S., Wang, C., Shen, H.-Z., Zhuo, Y.-W.,
and Deng, L.-J. (2022). Patchmask: A data augmen-
tation strategy with gaussian noise in hyperspectral
images. Remote Sensing, 14(24).
Ho, J., Jain, A., and Abbeel, P. (2020). Denoising diffusion
probabilistic models.
Hu, J., Xiao, F., Jin, Q., Zhao, G., and Lou, P. (2023). Syn-
thetic data generation based on rdb-cyclegan for indus-
trial object detection. Mathematics, 11(22).
Lafontaine, V., Bouchard, K., Maître, J., and Gaboury, S.
(2024). Generating synthetic augmentation data from
a practical uwb radar dataset using vq-vae. In Pro-
ceedings of the 2024 International Conference on In-
formation Technology for Social Good, GoodIT ’24,
page 212–215, New York, NY, USA. Association for
Computing Machinery.
Lee, J.-H., Zaheer, M. Z., Astrid, M., and Lee, S.-I. (2020).
Smoothmix: A simple yet effective data augmenta-
tion to train robust classifiers. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops.
Liang, W., Liang, Y., and Jia, J. (2023). Miamix: Enhancing
image classification through a multi-stage augmented
mixed sample data augmentation method. Processes,
11(12).
Mikołajczyk, A. and Grochowski, M. (2018). Data augmen-
tation for improving deep learning in image classifica-
tion problem. In 2018 International Interdisciplinary
PhD Workshop (IIPhDW), pages 117–122.
Perez, L. and Wang, J. (2017). The effectiveness of data aug-
mentation in image classification using deep learning.
Podell, D., English, Z., Lacey, K., Blattmann, A., Dock-
horn, T., Müller, J., Penna, J., and Rombach, R. Sdxl:
Improving latent diffusion models for high-resolution
image synthesis. In The Twelfth International Confer-
ence on Learning Representations.
Puttaruksa, C. and Taeprasartsit, P. (2018). Color data aug-
mentation through learning color-mapping parameters
between cameras. In 2018 15th International Joint
Conference on Computer Science and Software Engi-
neering (JCSSE), pages 1–6.
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and Om-
mer, B. (2021). High-resolution image synthesis with
latent diffusion models. 2022 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 10674–10685.
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and
Ommer, B. (2022). High-resolution image synthesis
with latent diffusion models. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 10684–10695.
Shijie, J., Ping, W., Peiyi, J., and Siping, H. (2017). Re-
search on data augmentation for image classification
based on convolution neural networks. In 2017 Chinese
Automation Congress (CAC), pages 4165–4170.
Sumari, A. (2009). A study on identification friend, foe, or
neutral methods: The performance of supervised and
unsupervised neural networks in performing aircraft
identification tasks. 5:10.
Takahashi, R., Matsubara, T., and Uehara, K. (2020). Data
augmentation using random image cropping and patch-
ing for deep cnns. IEEE Transactions on Circuits and
Systems for Video Technology, 30(9):2917–2931.
Trabucco, B., Doherty, K., Gurinas, M., and Salakhutdinov,
R. (2023). Effective data augmentation with diffusion
models.
Walawalkar, D., Shen, Z., Liu, Z., and Savvides, M. (2020).
Attentive cutmix: An enhanced data augmentation ap-
proach for deep learning based image classification.
CoRR, abs/2003.13048.
Wu, Z., Wang, L., Wang, W., Shi, T., Chen, C., Hao, A.,
and Li, S. (2022). Synthetic data supervised salient
object detection. In Proceedings of the 30th ACM
International Conference on Multimedia, MM ’22,
page 5557–5565, New York, NY, USA. Association
for Computing Machinery.
Xiao, X., Ganguli, S., and Pandey, V. (2020). Vae-info-cgan:
generating synthetic images by combining pixel-level
and feature-level geospatial conditional inputs. In Pro-
ceedings of the 13th ACM SIGSPATIAL International
Workshop on Computational Transportation Science,
IWCTS ’20, New York, NY, USA. Association for
Computing Machinery.
Zhang, L., Rao, A., and Agrawala, M. (2023). Adding con-
ditional control to text-to-image diffusion models. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 3836–3847.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
796
