
Multi-Modal Multi-View Perception Feature Tracking for Handover
Human Robot Interaction Applications
Chaitanya Bandi
a
and Ulrike Thomas
Robotics and Human Machine Interaction Lab, Technical University of Chemnitz, Chemnitz, Germany
{chaitanya.bandi, ulrike.thomas}@etit.tu-chemnitz.de
Keywords:
Hand Pose, Hand-Object Pose, Body Pose, Handover, Human-Robot Interaction.
Abstract:
Object handover is a fundamental task in human-robot interaction (HRI) that relies on robust perception fea-
tures such as hand pose estimation, object pose estimation, and human pose estimation. While human pose
estimation has been extensively researched, this work focuses on creating a comprehensive architecture to
track and analyze hand and object poses, thereby enabling effective handover state determination. We pro-
pose an end-to-end architecture that integrates unified hand-object pose estimation with hand pose tracking,
leveraging an early and efficient fusion of RGB and depth modalities. Our method incorporates existing state-
of-the-art techniques for human pose estimation and introduces novel advancements for hand-object pose esti-
mation. The architecture is evaluated on three large-scale open-source datasets, demonstrating state-of-the-art
performance in unified hand-object pose estimation. Finally, we implement our approach in a human-robot
interaction scenario to determine the handover state by extracting and tracking the necessary perception fea-
tures. This integration highlights the potential of the proposed system for enhancing collaboration in HRI
applications.
1 INTRODUCTION
Bi-directional handovers in human-robot interaction
(HRI) involve the mutual transfer of objects be-
tween humans and robots, encompassing both robot-
to-human and human-to-robot interactions. This dy-
namic exchange requires the robot to not only exe-
cute precise physical actions but also understand con-
textual cues to coordinate effortlessly with the human
partner. In both directions, the process depends on
accurate perception, intention recognition, and syn-
chronized motion planning. For instance, in a robot-
to-human handover, the robot must identify when the
human is ready to receive the object by analyzing
body posture, hand position, and gaze direction. Con-
versely, in a human-to-robot handover, the robot must
detect when the human intends to release the object by
monitoring cues like grip loosening or object trajec-
tory. For human-to-robot handovers, the robot’s role
involves anticipating the human’s intent, adjusting its
gripper orientation to align with the object’s pose, and
ensuring a firm grasp at the right moment. This direc-
tion of communication also needs to consider safety
of human subject and avoid collsions.
a
https://orcid.org/0000-0001-7339-8425
In this work, we design a model and test specifi-
cally for human-to-robot complex handover scenario
nevertheless the model is applicable for handover ap-
plication. We can achieve the seamless interaction
model by fusing vision-based 3D hand pose track-
ing, unified hand-object pose tracking, and body pose
tracking. The core idea is to leverage the relationships
between the tracked features (hand pose, body pose,
and object pose) to recognize the interaction state
(handover).The fusion of data from multiple modal-
ities ensures robustness and reduces ambiguities in
complex or cluttered environments.
Human body pose estimation is a well-researched
area, with recent advancements achieving robust per-
formance even under conditions of partial body oc-
clusion. Given this progress, our focus is not on con-
tributing to this domain but rather on leveraging exist-
ing state-of-the-art methods capable of real-time 3D
human pose estimation.
The primary contribution of this work lies in
achieving unified hand-object pose estimation. Lever-
aging Intel RealSense D415 cameras, which provide
both RGB and depth data, we utilize multimodal in-
put to enhance the accuracy of hand-object pose esti-
mation. To surpass state-of-the-art performance, our
approach integrates feature fusion from multimodal
Bandi, C. and Thomas, U.
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications.
DOI: 10.5220/0013373800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
797-807
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
797

Figure 1: The proposed architecture provides an overview of a multi-camera setup designed for object handover interactions
in a human-robot interaction environment. Among the three available camera views, only two are utilized, as the third view
is deemed unnecessary for the handover application and is therefore excluded from the architecture.
data at early stages, along with cross-attention and
self-attention mechanisms within the network. The
complete process for estimating the handover inter-
action states is depicted in Figure 1. In the collabo-
rative interaction scenario, two cameras are strategi-
cally positioned within the workspace. The first cam-
era is placed to ensure a clear view of the subject’s
upper body and face, capturing essential cues for in-
teraction. The second camera is mounted on the left
and right sides, respectively as illustrated in Figure 1.
The RGB image from the first camera view is pro-
cessed using RTMW3D (Jiang et al., 2024) to obtain
3D human pose estimation. Images from the second
camera are fed into the YOLOv8 (Ultralytics, 2023)
architecture to detect bounding boxes of the hand and
identify the object regions, facilitating unified hand-
object pose estimation.
After extracting the necessary information from
YOLOv8 (Ultralytics, 2023), we proceed with two
distinct tasks: 3D hand pose estimation and unified
hand-object pose tracking. To avoid overload of load-
ing all the models every time, we introduce proxim-
ity and geometric cues in addition to the bounding
box intersection from object detection. For indepen-
dent 3D hand mesh reconstruction, we adopt a process
similar to the Vision Transformer (ViT) (Dosovitskiy
et al., 2020) architecture. The input images are di-
vided into patches and passed through a transformer
encoder, which regresses the pose parameters of the
MANO hand model.
Building on this foundation, our proposed contri-
bution focuses on estimating the unified hand-object
pose for real-time tracking in handover interaction
scenarios. This unified approach enables precise and
efficient tracking of both the hand and the object, en-
hancing the system’s reliability during dynamic inter-
actions. For unified hand-object pose estimation, we
rely on multi-modal data from intelrealsense camera.
To reduce computational complexity in later stages,
we first fuse the RGB and depth information using an
attention mechanism. The fused data is then passed
through a unified backbone network based on a Mo-
bileNetV2 (Sandler et al., 2018) feature pyramid net-
work (Lin et al., 2017) (FPN). ROI aligned informa-
tion from hand and object are forwarded to separate
hand and object encoders using attention mechanism
which are later decoded using cross-attention to ob-
tain outputs. From the hand decoder, MANO pose
and shape parameters are obtained, which are then
processed through the MANO model to reconstruct
the 3D hand mesh. Meanwhile, the object decoder
regresses 2D keypoint correspondences, which are
matched with 3D keypoints to compute the object’s
6D pose using the Perspective-n-Point (PnP) (Lepetit
et al., 2009) algorithm.
2 RELATED WORK
This work focuses on three perception features: 3D
body pose estimation, 3D hand mesh recovery, and
6D object pose estimation. We then perform unified
hand-object pose estimation. For 3D body pose esti-
mation we rely on existing state-of-the-art works. In
this section, we discuss recent work related to hand
mesh reconstruction and unified hand-object pose es-
timation.
2.1 3D Hand Mesh Reconstruction
The work introduced in (Zimmermann and Brox,
2017) one of the first deep learning frameworks for
3D hand pose estimation from RGB images. It em-
ployed a keypoint-based regression method to pre-
dict the 3D pose and introduced a dataset to facili-
tate this task. The model demonstrated robustness in
single-view hand pose estimation but lacked the abil-
ity to model the hand’s detailed shape. Hand Point-
Net (Ge et al., 2018) utilized point clouds to esti-
mate hand poses directly, avoiding reliance on inter-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
798

Figure 2: The architecture of the proposed 3D hand pose estimation and unified hand-object pose estimation.
mediate 2D representations. By operating on point
sets, this method was robust to occlusions and noise.
The approach effectively captured geometric features
but required depth input, limiting its applicability in
RGB-only scenarios. The work introduced in (Baek
et al., 2019) contains a neural rendering framework
that iteratively refines hand pose estimations by com-
paring the rendered hand image with the observed in-
put. This iterative approach improved pose accuracy
and made the network more resilient to occlusions and
ambiguous poses.
In contrast, to achieve accurate hand pose estima-
tion, many works adopt a model-based method uti-
lizing the differentiable MANO model introduced in
(Romero et al., 2017). This approach enables the si-
multaneous estimation of 3D hand pose and shape,
represented as a detailed mesh. The authors in (Ge
et al., 2019) propose a method for estimating both
hand shape and pose by predicting the parameters
of the MANO hand model. By leveraging the dif-
ferentiable nature of MANO (Romero et al., 2017),
the method reconstructed realistic hand meshes while
maintaining computational efficiency. Later many re-
search works such as (Cai et al., 2019), (Moon et al.,
2020), (Park et al., 2022a), (Pavlakos et al., 2024)
were developed on MANO based hand model with
different backbones.
2.2 Unified Hand-Object Pose
Estimation
HOPE-Net (Wang et al., 2022) integrates hand and
object pose estimation into a unified framework us-
ing a shared latent space. The network employs a
disentangled representation for joint and independent
pose estimations of hands and objects. The use of
multi-task learning allows simultaneous hand and ob-
ject pose prediction, resulting in efficient processing.
A key advantage of this approach is its ability to han-
dle occlusions effectively due to the shared feature
space between hands and objects, enabling robust es-
timation under challenging conditions.
HOISDF (Xu et al., 2022) employs global signed
distance fields (SDFs) for simultaneous learning of
hand and object shapes. It leverages SDFs to encode
mutual constraints between hands and objects, focus-
ing on global plausibility rather than fine-grained de-
tails. The approach includes a U-Net-based encoder-
decoder for hierarchical feature extraction and SDF
decoders for estimating distances to hand and object
surfaces. This method excels in handling occlusions
and capturing robust global information. Later many
works improved and extended based of SDFs (Chen
et al., 2022b), (Chen et al., 2023).
The framework (Qu et al., 2023) combines neu-
ral rendering and model-based fitting for joint hand-
object pose estimation. The method uses offline learn-
ing to build generative implicit models for hand and
object geometry. During online inference, rendering-
based model fitting refines poses under geometric
constraints. A key advantage is the ability to generate
smooth and stable pose sequences for videos, reduc-
ing jitter and improving temporal consistency.
Dense Mutual Attention (Zhao et al., 2023) in-
troduces a novel approach for estimating 3D hand-
object poses by explicitly modeling fine-grained in-
teractions using a dense mutual attention mechanism.
This method aims to improve the physical plausibil-
ity and quality of pose estimations while maintain-
ing real-time inference speed. The approach con-
structs hand and object graphs based on their mesh
structures. Each node in the hand graph aggregates
features from all nodes in the object graph through
learned attention weights, and vice versa. This dense
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications
799

interaction captures detailed dependencies between
the hand and object, enhancing interaction modeling.
HFL-Net (Wang et al., 2023) presents a frame-
work that integrates hand and object pose estima-
tion into a unified process by focusing on capturing
mutual constraints and interactions. The core con-
tribution lies in a harmonious feature learning strat-
egy, which emphasizes extracting joint features that
represent both the hand and the object while main-
taining their distinct identities. The approach lever-
ages advanced neural architectures to encode fine-
grained hand-object relationships and applies atten-
tion mechanisms to dynamically prioritize critical in-
teraction regions. Experimental results show that this
method achieves superior accuracy and robustness,
particularly in scenarios involving occlusions or com-
plex hand-object interactions, making it well-suited
for real-world applications in human-robot collabora-
tion and augmented reality.
The work (Hoang et al., 2024)proposes a novel ap-
proach to hand-object pose estimation that combines
multiple modalities, such as RGB and depth images,
to enhance the accuracy and robustness of the estima-
tion. The method employs adaptive fusion techniques
to intelligently combine information from different
sensory inputs, optimizing the model’s ability to han-
dle varying input conditions. The core innovation of
this work lies in the introduction of interaction learn-
ing, which models the dynamic interactions between
the hand and object to improve pose predictions, es-
pecially in challenging scenarios involving complex
hand-object interactions.
Figure 3: Early efficient RGBD fusion. Attention-based fu-
sion of RGB and depth image.
3 METHODOLOGY
In this work, we aim to develop a comprehensive
model for object handover with a strong focus on
safety. To achieve this, we utilize perception fea-
ture extraction networks capable of real-time opera-
tion. These include 3D human body pose estimation,
3D hand pose estimation, and unified hand-object
pose estimation. Rather than designing all compo-
nents from scratch, we leverage existing state-of-the-
art methods. Specifically, for 3D human body pose
estimation, we adopt the recently introduced RTMW
model (Jiang et al., 2024), which offers high accu-
racy and real-time performance, making it suitable
for multi-person whole-body pose estimation scenar-
ios. The model processes input images to detect mul-
tiple people and their detailed poses simultaneously,
even in crowded or dynamic scenarios. By balancing
speed and precision, RTMW demonstrates robust per-
formance in real-time applications such as sports an-
alytics, augmented reality, and human-robot interac-
tion. Its real-world usability is enhanced by its ability
to handle occlusions and variations in body configu-
rations.
To optimize system performance, we chose to
track features continuously, except for 3D human
body pose estimation, to avoid unnecessary computa-
tional overhead. To minimize redundant processing,
we implemented a hand-object proximity detection
method to bypass 6D object pose estimation when
it is not required. The proximity detection relies on
two simple but effective approaches. The first ap-
proach involves monitoring the intersection of bound-
ing boxes over time, as detected using YOLOv8.
However, due to the cluttered arrangement of ob-
jects, multiple items may overlap within certain dura-
tions. To address this, we incorporated additional cri-
teria, including depth proximity and geometric cues.
Specifically, we check if the depth of both the hand
and object is within close range (less than 0.5 cm)
and overlaps persist for a set number of frames. When
these conditions are met, we assume the object is in
the human hand and trigger unified hand-object pose
estimation. Otherwise, we only compute 3D hand
pose reconstruction, reducing unnecessary computa-
tional load. The complete architecture is illustrated in
Figure 2
The process begins by passing the RGB image
through the YOLOv8 (Ultralytics, 2023) object de-
tection model, which has been retrained for this work
to detect YCB (Calli et al., 2017) objects and hu-
man hands. The model outputs bounding boxes for
all YCB (Calli et al., 2017) objects and the hand,
if present. Using this bounding box information,
proximity is assessed based on depth and geometric
cues. The RGB and depth images are then cropped
to focus on either the hand pose or the unified hand-
object pose, guided by the bounding box and proxim-
ity data. To ensure consistency, the cropped regions
maintain their original aspect ratios and are resized to
dimensions of 224 × 224 × 3 for the RGB image and
224 × 224 × 1 for the depth image.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
800

3.1 RGBD Attention-Based Fusion
The initial step involves performing efficient early-
stage RGB-D attention fusion. Direct fusion at this
stage often results in information loss, so we em-
ploy an attention mechanism with learnable parame-
ters to selectively integrate critical depth information
into the model. This approach eliminates the need for
additional networks, such as PointNet++ (Qi et al.,
2017) or CNNs, which can introduce latency and
hinder real-time inference. By integrating depth in-
formation efficiently, the system maintains high per-
formance without compromising real-time processing
capabilities. The process of Efficient RGBD fusion
with attention mechanism is illustrated in Figure 3.
3.2 Hand Mesh Reconstruction
Network
The backbone of the Hand Mesh Reconstruc-
tion (HMR) network is the vision transformer
(ViT) (Dosovitskiy et al., 2020). we follow the similar
process as the work (Pavlakos et al., 2024) to encode
the hand features using vision transformer. The en-
coded features are then decoded to obtain the mano
parameters. The MANO parameters are then for-
warded to the MANO model to obtain 3D hand mesh
and 3D hand joint locations.
3.2.1 MANO Parametric Model
The MANO (Model-based Articulated hand tracking
using a NOnlinear representation) hand parametric
model is a statistical 3D model that represents hu-
man hand shapes and poses in a compact and effi-
cient form. It is an adaptation of the SMPL (Skinned
Multi-Person Linear) model, customized for hand
pose and shape estimation. MANO parameterizes a
3D hand mesh using two components: pose param-
eters θ ∈ R
K×3
, which control the rotation of K =
16 joints in axis-angle format, and shape parameters
β ∈ R
N
, which define individual hand shape variations
based on N = 10 principal components derived from
a dataset of scanned hand shapes.
The MANO model outputs a triangulated 3D
mesh with V = 778 vertices connected by faces to
form the hand’s surface. The pose and shape param-
eters (16 × 3 + 10 = 58) are combined with a linear
blend skinning algorithm to deform the mesh accord-
ing to the desired articulation and morphology. This
allows for realistic and anatomically plausible hand
representations. A key feature of MANO is its ability
to directly regress joint locations, making it suitable
for both hand pose estimation and applications requir-
ing high-quality hand-object interaction modeling.
3.3 Architecture
The input to the proposed architecture is a fused im-
age of size 224 × 224 × 3. This image is divided
into 16 non-overlapping patches, which are then for-
warded to the Vision Transformer (ViT) (Dosovitskiy
et al., 2020) architecture to encode hand-specific fea-
tures. The ViT-H backbone outputs a sequence of to-
kens that encapsulate the encoded hand information.
To decode these features, a transformer decoder is
employed. It processes the output tokens from the
ViT and regresses the MANO parameters similar to
the work in (Pavlakos et al., 2024). These parameters
are subsequently passed to the MANO model, which
generates 3D hand joint locations and 3D mesh ver-
tices.
3.4 Hand-Object Mesh Reconstruction
Network
Once the proximity is triggered, the system performs
unified hand-object pose estimation. The fused im-
age F
fused
∈ R
224×224×3
is forwarded as input to
the Hand-Object Mesh Reconstruction (HOMR) net-
work. For feature extraction from F
fused
, the Mo-
bileNetV2 FPN (Lin et al., 2017) architecture is uti-
lized, which ensures computational efficiency while
capturing rich feature representations.
MobileNetV2 (Sandler et al., 2018) is a
lightweight and efficient convolutional neural
network architecture designed for mobile and em-
bedded vision applications. The core innovation in
MobileNetV2 is the use of inverted residual blocks
and linear bottlenecks. MobileNetV2 FPN (Lin et al.,
2017) (Feature Pyramid Network) combines the
efficient MobileNetV2 backbone with the multi-scale
feature processing capabilities of FPN for improved
object detection and segmentation tasks. In the FPN
architecture, features from different stages of the
network are combined to form a feature pyramid,
allowing the model to leverage both high-resolution
and high-level semantic information. Once the
hand-object features from MobileNetV2 FPN are
extracted, the region of interest (ROI) aligned infor-
mation of each of the features are extracted. The ROI
aligned features are then forwarded to the deformable
transformer (Zhu et al., 2021) (DETR) encoder for
both hand and object.
The input to the deformable multi-headed trans-
former attention is a feature map of size 7 × 7 × 256,
which corresponds to a spatial resolution of 7 × 7
with 256 feature channels. This input is first flat-
tened into a sequence of size 49 × 256, where 49 is
the total number of spatial tokens (7 × 7). A learn-
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications
801
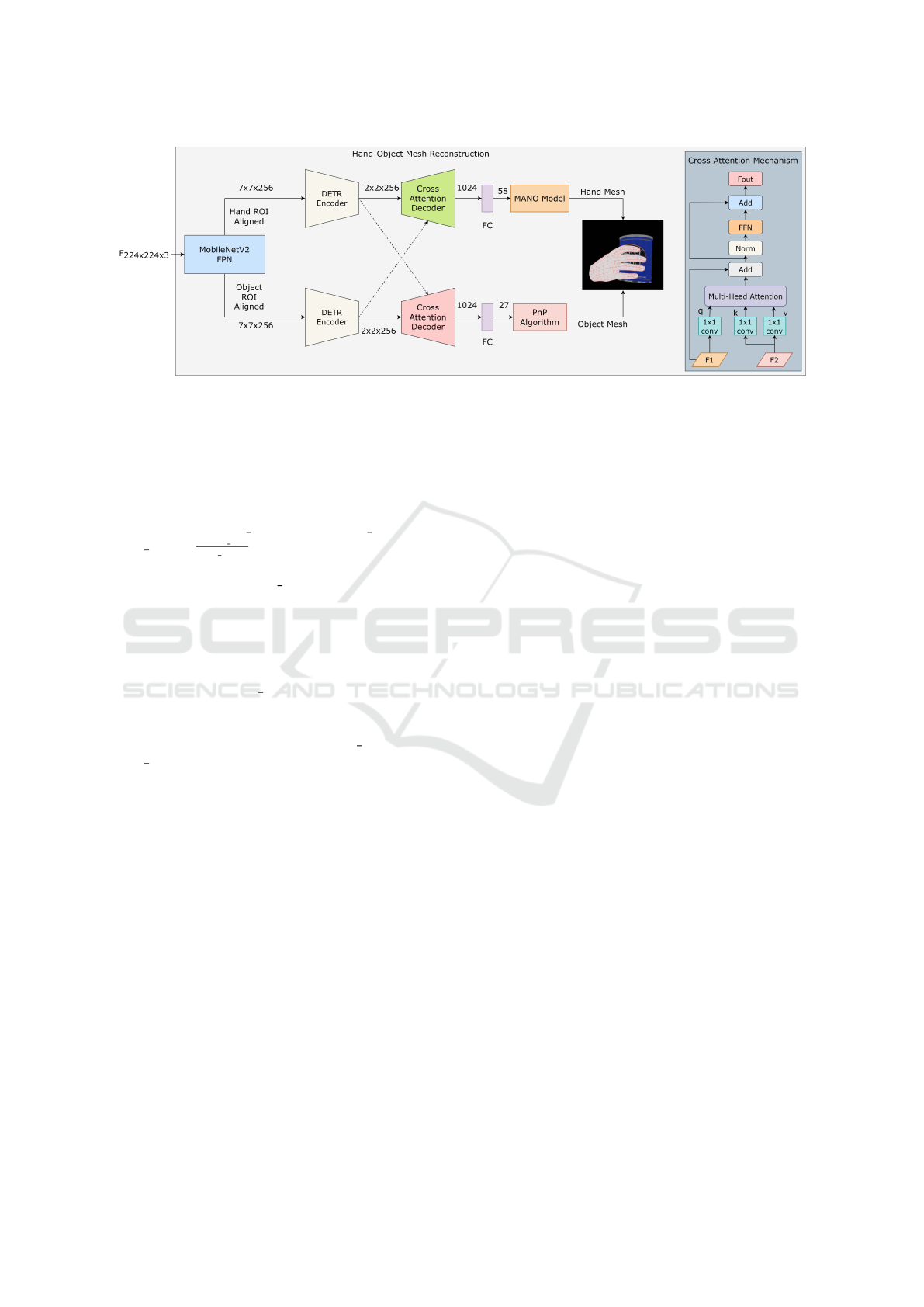
Figure 4: The architecture of the Hand-Object Mesh Reconstruction (HOMR) network. This network employs a MobileNet-
FPN backbone, deformable transformers, and a cross-attention mechanism to achieve unified hand-object pose estimation.
able positional embedding of size 49 × 256 is added
to the input sequence to incorporate spatial informa-
tion. The input is then projected into query, key,
and value tensors, each of size 49 × 256. These ten-
sors are reshaped for multi-head attention into the
dimensions B × num heads × 49 × head dim, where
head dim =
embed dim
num heads
. Offsets for deformable sam-
pling are predicted through a linear layer, producing
a tensor of size 49 × num heads × 2 for each spatial
token. These offsets dynamically determine the sam-
pling locations within the feature map and B is the
batch size, number of heads is 8, and head dimension
is 128.
The attention mechanism computes attention
scores of size B × num heads × 49 × 49 using scaled
dot-product attention. These scores are used to com-
pute a weighted sum of the value tensor, resulting
in an attended output of size B × num heads × 49 ×
head dim. The outputs from all heads are concate-
nated back into the shape B × 49 × 256. After ap-
plying a final projection layer, the output is reshaped
back into the original spatial resolution of 7×7 ×256.
To meet the desired output size of 2 × 2 × 256, bilin-
ear interpolation is applied to downsample the spatial
dimensions from 7 × 7 to 2 × 2, while preserving the
256 feature channels. The final output is a tensor of
size B × 2 × 2 × 256.
The extracted features are forwarded to the cross-
attention decoder layer, where the query for the hand
decoder consists of the object-encoded information,
while the query for the object decoder is derived from
the hand decoder’s features. After performing the
cross-attention mechanism, a fully connected layer is
employed to generate the respective output features.
Specifically, the hand decoder outputs 58 parameters
representing the MANO (Romero et al., 2017) hand
model, and the object decoder outputs 27 features cor-
responding to 9 keypoints, each with 3 dimensions.
For the object keypoints, the first two dimensions
(x, y) represent the 2D location of the keypoint, while
the third dimension represents the confidence score of
the keypoint being accurately predicted.
The predicted MANO parameters are subse-
quently passed into the MANO model to compute
the hand mesh vertices and the 3D keypoints of the
hand. Similarly, using the predicted 2D keypoints and
known 3D correspondences of the object, the 6D pose
of the object is estimated by solving the Perspective-
n-Point (Lepetit et al., 2009) (PnP) problem itera-
tively. This approach ensures accurate estimation of
both the hand’s mesh structure and the object’s pose in
a unified framework. The complete HOMR network
is illustrated in Figure 4
3.4.1 Loss Function
To train the network, we define a composite loss
function that minimizes the L2 distances between the
predicted and ground truth values of H (object key-
points), θ (pose parameters), β (shape parameters), V
(3D vertices), and J (3D joints). The total loss for
hand pose estimation, denoted as L
overall
, is formu-
lated as:
L
overall
= L
Obj
+ L
3D
+ L
MANO
The term L
Ob j
corresponds to the L2 loss for 2D
object keypoint location predictions, ensuring accu-
rate localization of keypoints in the 2D space:
L
Ob j
=
K
∑
i=1
o
i
− o
gt
i
2
2
Here, o
i
and o
gt
i
denote the predicted and ground
truth keypoints for the i-th keypoint, respectively, and
K is the total number of keypoints.
The term L
3D
accounts for the L2 loss between the
predicted and ground truth 3D vertices (V) and joint
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
802

Table 1: Comparison with the state-of-the-art on the Frei-
HAND dataset.
Method PA-MPJPE↓ PA-MPVPE↓ F@5↑ F@15↑
I2UV-HandNet (Chen et al., 2021) 6.7 6.9 0.707 0.977
METRO (Lin et al., 2021) 6.5 6.3 0.731 0.984
Tang et al. (Tang et al., 2021) 6.7 6.7 0.724 0.981
MobRecon (Chen et al., 2022a) 5.7 5.8 0.784 0.986
AMVUR (Jiang et al., 2023) 6.2 6.1 0.767 0.987
HaMeR (Pavlakos et al., 2024) 6.0 5.7 0.785 0.990
Ours 5.7 5.6 0.797 0.990
Table 2: Comparison with the state-of-the-art on the HO-3D
dataset.
Method PA-MPJPE↓ PA-MPVPE↓ F@5↑ F@15↑
Liu et al. (Liu et al., 2021) 9.9 9.5 0.528 0.956
HandOccNet (Park et al., 2022b) 9.1 8.8 0.564 0.963
I2UV-HandNet (Chen et al., 2021) 9.9 10.1 0.500 0.943
Hampali et al. (Hampali et al., 2020) 10.7 10.6 0.506 0.942
Hasson et al. (Hasson et al., 2019) 11.0 11.2 0.464 0.939
METRO (Lin et al., 2021) 10.4 11.1 0.484 0.946
MobRecon (Chen et al., 2022a) 9.2 9.4 0.538 0.957
AMVUR (Jiang et al., 2023) 8.3 8.2 0.608 0.965
HaMeR (Pavlakos et al., 2024) 7.7 7.9 0.635 0.980
Ours 7.7 7.8 0.635 0.978
coordinates (J), promoting accurate 3D mesh recon-
struction and joint localization:
L
3D
=
V − V
gt
2
2
+
J − J
gt
2
2
The term L
MANO
imposes L2 losses on the
MANO shape parameters (β) and pose parameters
(θ), ensuring accurate estimation of the hand’s pose
and shape:
L
MANO
=
β − β
gt
2
2
+
θ − θ
gt
2
2
Here, V
gt
, J
gt
, β
gt
, and θ
gt
represent the ground
truth 3D vertices, joint coordinates, shape parame-
ters, and pose parameters, respectively. The com-
bined loss L
overall
ensures robust hand pose, object
pose and mesh estimation by optimizing both spatial
accuracy and parametric consistency.
4 EXPERIMENTATION
This section presents a comprehensive evaluation of
the proposed approach on three widely used RGB-
D datasets: FreiHand (Only hand interactions) (Zim-
mermann et al., 2020), HO-3D (Zhang et al., 2020)
and DexYCB (Mishra et al., 2020) (these contain
hand-object interactions). These datasets are de-
signed to reflect realistic hand pose scenarios, offer-
ing a robust benchmark for assessing the performance
of hand pose estimation techniques in practical set-
tings. Our analysis includes a detailed comparison
with leading RGB-based and depth-based methods,
allowing us to effectively validate the robustness and
accuracy of our approach against state-of-the-art al-
ternatives.
4.1 Implementation Details
For hand and YCB (Calli et al., 2017) object detec-
tion, we utilize bounding box annotations from all
three datasets. While YOLOv8 (Ultralytics, 2023)
is employed for detection tasks, we do not conduct
an extensive evaluation of its transfer learning perfor-
mance, as this aspect has already been thoroughly ex-
plored in prior studies.
The HMR network was trained for 70 epochs us-
ing the Adam optimizer. To improve generalization,
a weight decay of 5 × 10
−4
was applied, which was
scheduled to update every 10 epochs. During training,
the aspect ratios of all input images were preserved to
ensure realistic representations of hand poses. The
images were resized to a resolution of 224 × 224 pix-
els while maintaining their original proportions.
The HOMR architecture was trained under a setup
similar to the hand mesh reconstruction network, with
a few adjustments. The HOMR model was trained for
100 epochs using the Adam optimizer, with a weight
decay of 5× 10
−4
applied every 10 epochs. The train-
ing process also preserved the aspect ratios of all in-
put images, which were resized to a fixed resolution
of 224 × 224 pixels to align with the network’s input
requirements while retaining critical spatial informa-
tion.
4.2 Datasets and Evaluation Metrics
The HO-3D (Hand-Object 3D) dataset (Zhang
et al., 2020) is a publicly available resource designed
for research in hand pose estimation and hand-object
interaction analysis. It provides a comprehensive col-
lection of RGB-D images capturing real-world in-
teractions between hands and various objects. The
dataset emphasizes scenarios involving natural hand
poses while manipulating objects, making it highly
suitable for studying complex hand-object interac-
tions.
The DexYCB dataset (Mishra et al., 2020) is a
comprehensive resource designed for studying hand-
object interactions, particularly focusing on 6D ob-
ject pose estimation and 3D hand pose estimation. It
features a diverse set of RGB-D sequences capturing
real-world interactions with objects from the YCB ob-
ject set, a widely used benchmark for robotic manip-
ulation research.
The FreiHand dataset (Zimmermann et al.,
2020) is a high-quality resource for advancing re-
search in 3D hand pose estimation and shape recon-
struction. It is specifically designed to provide chal-
lenging and realistic scenarios, featuring diverse hand
poses captured from real-world settings. The dataset
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications
803

Figure 5: The qualitative samples of the DexYCB dataset obtained from the HOMR network.
includes 134,000 samples collected from 32 unique
subjects, ensuring significant variation in hand shape,
size, and pose.
For FreiHand dataset and HO-3D dataset, we re-
port the F-scores, the mean joint error (PAMPJPE),
and the mean mesh error (PAMPVPE) in millimeters
after performing Procrustes alignment. For DexYCB
dataset, we report non procrustes aligned MPJPE. For
6D object pose estimation, we compute ADD-S (Av-
erage Distance of Model Points with Symmetry). The
Average Distance of Model Points (ADD) is a widely
used metric to evaluate the accuracy of 6D object
pose estimation. It calculates the mean distance be-
tween corresponding 3D points of the ground truth
object model and the estimated object model under a
predicted pose. In particular, for symmetric objects,
the ADD-s variant is employed to handle symmetry.
ADD-s is defined as:
ADD-s =
1
|M|
∑
x∈M
min
y∈M
∥(Rx+t)−(R
gt
y+t
gt
)∥, (1)
where M is the set of 3D model points, R and t
are the predicted rotation and translation of the ob-
ject, and R
gt
and t
gt
are the ground truth rotation and
translation. The term min
y∈M
accounts for symmetry
by finding the closest point y in the model set M for
each transformed point x.
ADD-S measures the average alignment error be-
tween the predicted and ground truth poses. Lower
ADD-s values indicate more accurate pose predic-
tions, making it a key metric for evaluating object
pose estimation in scenarios involving symmetrical
objects.
Table 3: Performance comparison with state-of-the-art
methods on hand pose estimation on the HO3D dataset.
Method PA-MPJPE↓ PA-MPVPE↓ F@5↑ F@15↑
Hasson et al. (Hasson et al., 2020) 11.4 11.4 42.8 93.2
Hasson et al. (Hasson et al., 2019) 11.0 11.2 46.4 93.9
Hampali et al. (Hampali et al., 2020) 10.7 10.6 50.6 94.2
Liu et al. (Liu et al., 2021) 10.1 9.7 53.2 95.2
HFL-Net (Wang et al., 2023) 8.9 8.7 57.5 96.5
Ours 8.87 8.79 58.5 96.9
Table 4: Performance comparison on the object pose esti-
mation task for Cleanser, Bottle, and Can categories.
Method Cleanser↑ Bottle↑ Can↑ Average↑
Liu et al. (Liu et al., 2021) 88.1 61.9 53.0 67.7
HFL-Net (Wang et al., 2023) 81.4 87.5 52.2 73.3
Ours 85.4 86.3 51.4 74.3
4.3 Comparison to the State-of-the-Art
In this study, we implement two distinct networks:
HMR and HOMR. For the model trained with the
HMR network, we evaluate and compare the 3D
hand pose and 3D mesh errors against state-of-the-
art methods using the HO-3D and FreiHand datasets.
For the model trained with the HOMR network,
which is a unified framework, we perform compar-
isons on both the HO-3D (Zhang et al., 2020) and
DexYCB (Mishra et al., 2020) datasets, benchmark-
ing the results against state-of-the-art techniques.
4.3.1 HMR Network Comparisons
Initially, we trained the HMR network using the Frei-
Hand dataset (Zimmermann et al., 2020). A detailed
comparison with state-of-the-art methods on the Frei-
Hand dataset is provided in Table 1. The evaluation
follows the standard protocol, with metrics reported
for assessing 3D joint and 3D mesh accuracy. The
PA-MPVPE and PA-MPJPE metrics are presented in
millimeters and low the error higher the 3D pose ac-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
804
Table 5: Comparison of hand pose estimation results with
state-of-the-art methods on the DexYCB dataset.
Method MPJPE↓ PAMPJPE↓ RGB-D
Hasson (Hasson et al., 2019) 17.6 - RGB
Hasson (Hasson et al., 2020) 18.8 - RGB
Tze et al. (Tse et al., 2022) 15.3 - RGB
Liu et al. (Liu et al., 2021) 15.27 6.58 RGB
DMA (Zhao et al., 2023) 12.7 - RGB
HFL-Net (Wang et al., 2023) 12.56 5.47 RGB
Hoang et al. (Hoang et al., 2024) 12.15 4.54 RGBD
Ours 11.9 4.61 RGBD
Table 6: Performance comparison of the object pose esti-
mation on DexYCB datset.
Method AUC↑ ADD-S < 2cm↑
Hasson et al. (Hasson et al., 2019) 0.69 0.65
Hasson et al. (Hasson et al., 2020) 0.75 0.71
Cao et al. (Cao et al., 2021) 0.70 0.72
Chen et al. (Chen et al., 2022b) 0.72 0.74
Chen et al. (Chen et al., 2023) 0.75 0.77
Hoang et al. (Hoang et al., 2024) 0.84 0.82
Ours 0.86 0.83
curacy.
To assess the performance of our model on hand-
object datasets, we further evaluate the HMR network
using the HO-3D (Zhang et al., 2020) dataset. Consis-
tent with the evaluation on the FreiHand dataset, we
report PA-MPVPE and PA-MPJPE metrics, both ex-
pressed in millimeters. A detailed comparison of the
results is presented in Table 2. From these compar-
isons, it is evident that our model achieves error rates
comparable to HaMeR (Pavlakos et al., 2024). The
slight differences in error values can be attributed to
our use of a fused RGB and Depth image approach,
where the depth fusion introduces marginal variations
in performance.
4.3.2 HOMR Network Comparisons
We evaluate the performance of the HOMR network
on two datasets: HO-3D (Zhang et al., 2020) and
DexYCB (Mishra et al., 2020). The evaluation in-
cludes both hand pose estimation errors and object
pose estimation metrics. Our proposed HOMR net-
work is compared against existing state-of-the-art
methods for hand-object pose estimation on HO-3D
dataset. The detailed results are presented in Ta-
ble 3. From the comparison, it is evident that the F-
scores and mesh error (PA-MPVPE) achieved by our
method surpass those of the current state-of-the-art
approaches. Additionally, the joint error (PA-MPJPE)
is slightly lower than that of the most recent state-of-
the-art methods.
Limited comparisons regarding object pose esti-
mation on the HO-3D (Zhang et al., 2020) dataset
have been presented in prior works. Two studies re-
ported the ADD-0.1D error for four objects from the
YCB dataset (Calli et al., 2017). For a fair evaluation,
we compare these specific objects, and the results are
detailed in Table 4. From the comparison, it can be
observed that the average object pose estimation error
in our method is slightly higher than the state-of-the-
art methods.
Similarly, limited works have reported hand-
object pose estimation performance on the
DexYCB (Mishra et al., 2020) dataset. Based
on our research, we compare the results with the
state-of-the-art methods. The reported values for
hand pose estimation are presented in Table 5. For
object pose evaluation, not all works use same
metrics so we compute ADD-S because it wasmostly
mentioned by research works. The ADD-S and area
under the curve (AUC) for object pose evaluation is
mentioned in the Table 6. Few qualitative samples
obtained from HOMR network on DexYCB dataset
is illustrated in Figure 5.The primary limitation of
this work arises when the hands are significantly
occluded, leading to failures in accurately estimating
hand joints.
5 CONCLUSIONS
In this work, we present a comprehensive architec-
tural framework tailored for human-robot interaction
applications, particularly focusing on tasks such as
object handover. Our key contribution lies in uni-
fied hand-object pose estimation, achieved through an
early-stage fusion of RGB and depth modalities. The
fused data is processed by a MobileNetV2 FPN-based
backbone to extract region-of-interest (ROI) aligned
features for both the hand and the object. These fea-
tures are subsequently encoded using a deformable
transformer, with cross-attention-based decoding em-
ployed to estimate both hand and object parameters.
From these parameters, we derive 3D hand mesh re-
constructions and 6D object pose estimations. The
proposed models are evaluated on large-scale open-
source datasets, demonstrating competitive, state-of-
the-art performance. Our future work will focus on
thoroughly evaluating the proposed system within a
human-robot interaction (HRI) workspace. While we
have tested the inference speed in real-time and con-
ducted preliminary tests on a limited number of sam-
ples to validate the system’s functionality in the HRI
environment, further efforts will include creating a
new dataset and testing the system in entirely unseen
environments to assess its robustness and generaliza-
tion capabilities.
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications
805

ACKNOWLEDGEMENTS
Funded by the German Federal Ministry of Educa-
tion and Research (BMBF) – Project-ID 01IS23047B
– aiRobot.
REFERENCES
Baek, S., Kim, K. I., and Kim, T.-K. (2019). Pushing the
envelope for rgb-based dense 3d hand pose estimation
via neural rendering. In 2019 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1067–1076.
Cai, Y., Ge, L., Liu, J., Cai, J., Cham, T.-J., Yuan, J., and
Thalmann, N. M. (2019). Exploiting spatial-temporal
relationships for 3d pose estimation via graph convo-
lutional networks. In Proceedings of the IEEE In-
ternational Conference on Computer Vision, pages
2272–2281.
Calli, B., Siu, A., Walsman, A., Matusik, W., and Allen, P.
(2017). The ycb object and model set: Towards com-
mon benchmarks for manipulation research. arXiv
preprint arXiv:1709.06965.
Cao, Z., Radosavovic, I., Kanazawa, A., and Malik, J.
(2021). Reconstructing hand-object interactions in
the wild. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV), pages
12417–12426.
Chen, P., Chen, Y., Yang, D., Wu, F., Li, Q., Xia, Q., and
Tan, Y. B. (2021). I2uv-handnet: Image-to-uv pre-
diction network for accurate and high-fidelity 3d hand
mesh modeling. 2021 IEEE/CVF International Con-
ference on Computer Vision (ICCV), pages 12909–
12918.
Chen, X., Liu, Y., Dong, Y., Zhang, X., Ma, C., Xiong, Y.,
Zhang, Y., and Guo, X. (2022a). Mobrecon: Mobile-
friendly hand mesh reconstruction from monocular
image. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 12912–12921.
Chen, Z., Hampali, S., Schmid, C., and Laptev, I. (2023).
Gsdf: Geometry-driven signed distance functions for
3d hand-object reconstruction. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 12890–12900.
Chen, Z., Hasson, Y., Schmid, C., and Laptev, I. (2022b).
Alignsdf: Pose-aligned signed distance fields for
hand-object reconstruction. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 231–248, Cham, Switzerland. Springer.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Min-
derer, M., Heigold, G., Gelly, S., Uszkoreit, J., and
Houlsby, N. (2020). An image is worth 16x16 words:
Transformers for image recognition at scale. ArXiv,
abs/2010.11929.
Ge, L., Cai, Y., Weng, J., and Yuan, J. (2018). Hand point-
net: 3d hand pose estimation using point sets. In 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 8417–8426.
Ge, L., Ren, Z., Li, Y., Xue, Z., Wang, Y., Cai, J., and
Yuan, J. (2019). 3d hand shape and pose estimation
from a single rgb image. 2019 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 10825–10834.
Hampali, S., Rad, M., Oberweger, M., and Lepetit, V.
(2020). Honnotate: A method for 3d annotation
of hand and object poses. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 3196–3206.
Hasson, Y., Tekin, B., Bogo, F., Laptev, I., Pollefeys, M.,
and Schmid, C. (2020). Leveraging photometric con-
sistency over time for sparsely supervised hand-object
reconstruction. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 571–580.
Hasson, Y., Varol, G., Tzionas, D., Kalevatykh, I., Black,
M. J., Laptev, I., and Schmid, C. (2019). Learning
joint reconstruction of hands and manipulated objects.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
11807–11816.
Hoang, D.-C., Tan, P. X., Nguyen, A.-N., Vu, D.-Q., Vu,
V.-D., Nguyen, T.-U., Hoang, N.-A., Phan, K.-T.,
Tran, D.-T., Nguyen, V.-T., Duong, Q.-T., Ho, N.-
T., Tran, C.-T., Duong, V.-H., and Ngo, P.-Q. (2024).
Multi-modal hand-object pose estimation with adap-
tive fusion and interaction learning. IEEE Access,
12:54339–54351.
Jiang, T., Xie, X., and Li, Y. (2024). Rtmw: Real-time
multi-person 2d and 3d whole-body pose estimation.
arXiv preprint arXiv:2407.08634.
Jiang, Z., Rahmani, H., Black, S., and Williams, B. M.
(2023). A probabilistic attention model with
occlusion-aware texture regression for 3d hand recon-
struction from a single rgb image. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 6276–6286.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). Epnp:
An accurate o(n) solution to the pnp problem. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 1–8.
Lin, K., Wang, L., and Liu, Z. (2021). End-to-end human
pose and mesh reconstruction with transformers. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
10690–10699.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2117–2125.
Liu, S., Jiang, H., Xu, J., Liu, S., and Wang, X.
(2021). Semi-supervised 3d hand-object poses esti-
mation with interactions in time. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 14687–14696.
Mishra, A., Fathi, A., Jain, M., and Handa, A. (2020). Dex-
ycb: A benchmark for dexterous manipulation of ob-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
806

jects in cluttered environments. In Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 3473–3480.
Moon, G., Yu, S.-I., Wen, H., Shiratori, T., and Lee, K. M.
(2020). Interhand2.6m: A dataset and baseline for
3d interacting hand pose estimation from a single rgb
image. In European Conference on Computer Vision
(ECCV).
Park, J., Oh, Y., Moon, G., Choi, H., and Lee, K. M.
(2022a). Handoccnet: Occlusion-robust 3d hand mesh
estimation network. In Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Park, J., Oh, Y., Moon, G., Choi, H., and Lee, K. M.
(2022b). Handoccnet: Occlusion-robust 3d hand mesh
estimation network. In Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Pavlakos, G., Shan, D., Radosavovic, I., Kanazawa, A.,
Fouhey, D., and Malik, J. (2024). Reconstructing
hands in 3D with transformers. In CVPR.
Qi, C. R., Liu, W., Wu, C., Su, H., and Guibas, L. J.
(2017). Pointnet++: Deep hierarchical feature learn-
ing on point sets in a metric space. In Advances
in Neural Information Processing Systems (NeurIPS),
volume 30.
Qu, W., Cui, Z., Zhang, Y., Meng, C., Ma, C., Deng, X., and
Wang, H. (2023). Novel-view synthesis and pose esti-
mation for hand-object interaction from sparse views.
2023 IEEE/CVF International Conference on Com-
puter Vision (ICCV), pages 15054–15065.
Romero, J., Masi, I., Ranjan, A., Zhu, Z., Liu, Y., Shih, Y.,
Joo, H., Niebles, J. C., and Black, M. J. (2017). Em-
bodied hands: Modeling and capturing hands and bod-
ies together. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 4514–4523.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residuals
and linear bottlenecks. Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 4510–4520.
Tang, X., Wang, T., and Fu, C.-W. (2021). Towards accurate
alignment in real-time 3d hand-mesh reconstruction.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision (ICCV), pages 13909–
13918.
Tse, T. H. E., Kim, K. I., Leonardis, A., and Chang, H. J.
(2022). Collaborative learning for hand and object re-
construction with attention-guided graph convolution.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
1664–1674.
Ultralytics (2023). Yolov8: State-of-the-
art object detection and segmentation.
https://github.com/ultralytics/ultralytics.
Wang, H., Wang, C., Li, H., and Li, Y. (2022). Hope net:
Hierarchical object pose estimation. IEEE Robotics
and Automation Letters, 7(4):7519–7526.
Wang, H., Wang, C., Li, H., and Li, Y. (2023). Har-
monious features learning for hand-object pose es-
timation. IEEE Robotics and Automation Letters,
8(2):1683–1690.
Xu, Y., Wang, H., Wang, C., Li, H., and Li, Y. (2022).
Hoisdf: A hierarchical object-interaction dataset with
spatial and functional dependencies. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
45(11):10379–10393.
Zhang, W., Wu, X., Luo, Z., Zhou, Z., Li, C., and Bao, X.
(2020). Ho-3d: A dataset for 3d hand object inter-
action. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 5867–5876.
Zhao, Y., Wang, H., Wang, C., Li, H., and Li, Y. (2023).
Interacting hand-object pose estimation via dense mu-
tual attention. IEEE Robotics and Automation Letters,
8(2):1675–1682.
Zhu, X., Su, W., Lu, L., Xu, B., Li, X., and Wang, J. (2021).
Deformable detr: Deformable transformers for end-
to-end object detection. In Proceedings of the In-
ternational Conference on Learning Representations
(ICLR).
Zimmermann, C. and Brox, T. (2017). Learning to estimate
3d hand pose from single rgb images. In 2017 IEEE
International Conference on Computer Vision (ICCV),
pages 4913–4921.
Zimmermann, C., Rother, C., Saito, J., Pock, T., Sumer, H.,
Loper, M., Deigel, M., and Geiger, A. (2020). Frei-
hand: A dataset for hand mesh estimation. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR), pages 4316–
4325.
Multi-Modal Multi-View Perception Feature Tracking for Handover Human Robot Interaction Applications
807
