
Advanced Vision Techniques in Soccer Match Analysis: From Detection
to Classification
Jakub Eichner
1 a
, Jan Nowak
1,2 b
, Bartłomiej Grzelak
1,3 c
, Tomasz Górecki
1 d
,
Tomasz Piłka
1 e
and Krzysztof Dyczkowski
1 f
1
Adam Mickiewicz University, Pozna´n, Poland
2
Poznan Supercomputing and Networking Center, Pozna´n, Poland
3
KKS Lech Pozna´n, Pozna´n, Poland
Keywords:
Computer Vision in Football, Object Detection and Tracking, Team Classification in Sports, Deep Learning
for Sports Analytics, Football Match Analysis.
Abstract:
This paper introduces an integrated pipeline for detecting, classifying, and tracking key objects within soccer
match footage. Our research uses datasets from KKS Lech Pozna
´
n, SoccerDB, and SoccerNet, considering
various stadium environments and technical conditions, such as equipment quality and recording clarity. These
factors mirror the real-world scenarios encountered in competitions, training sessions, and observations. We
assessed the effectiveness of cutting-edge object detection models, focusing on several R-CNN frameworks
and the YOLOv8 methodology. Additionally, for assigning players to their respective teams, we compared
the performance of the K-means algorithm with that of the Multi-Modal Vision Transformer CogVLM model.
Despite challenges like suboptimal video resolution and fluctuating weather conditions, our proposed solutions
have successfully demonstrated high precision in detecting and classifying key elements such as players and
the ball within soccer match footage. These findings establish a robust basis for further video analysis in
soccer, which could enhance tactical strategies and the automation of match summarization.
1 INTRODUCTION
The intricate flow of player movements, strategic for-
mations, and dynamic decision-making within a soc-
cer match creates a complex data landscape for anal-
ysis. The accurate interpretation of this data has
immense potential for coaches seeking to optimize
player positioning and team strategy. Traditional
analysis methods rely on manual observation and lim-
ited data points. However, advances in computer vi-
sion offer a compelling opportunity to unlock a new
level of objectivity and detail.
This paper presents the groundwork for creating
an unsupervised pipeline using computer vision tech-
niques to provide comprehensive insights into on-
field events and tactical analysis. Our solution aims to
a
https://orcid.org/0009-0001-6572-6000
b
https://orcid.org/0009-0001-9764-4798
c
https://orcid.org/0000-0002-6132-651X
d
https://orcid.org/0000-0002-9969-5257
e
https://orcid.org/0000-0003-1206-2076
f
https://orcid.org/0000-0002-2897-3176
automatically identify individual players, track their
movements across the field, classify team affiliation,
and extract key tactical trends. By combining object
detection and classification algorithms, our approach
provides a comprehensive solution to the challenges
of traditional soccer analysis. Each area has been
tested with different methods to determine the best al-
gorithm for this niche problem.
To bridge the gap between on-field events and
data-driven analysis, our research lays the ground
for future work, where computer vision becomes an
integral tool for extracting complex data from non-
enriched video data that can be captured in any loca-
tion in the stadium. This paper invites further explo-
ration and refinement, ultimately contributing to the
advancement of both computer vision and soccer ana-
lytics. The findings presented here are part of a larger
research project in collaboration with KKS Lech Poz-
na
´
n, which includes an analysis of motor preparation,
injury prevention, and player evaluation (see (Piłka
et al., 2023; Sadurska et al., 2023)).
808
Eichner, J., Nowak, J., Grzelak, B., Górecki, T., Piłka, T. and Dyczkowski, K.
Advanced Vision Techniques in Soccer Match Analysis: From Detection to Classification.
DOI: 10.5220/0013377100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
808-815
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
2 PROBLEM DESCRIPTION
The proposed pipeline addresses three core tasks: ob-
ject detection, object tracking, and object classifica-
tion within soccer match videos. Each of these tasks
faces unique challenges, which we describe below:
2.1 Object Detection in Soccer
Object detection is key to computer vision-based soc-
cer analysis, as it allows you to identify players, the
ball, and the referee in video frames.
Region-based convolutional neural networks (Gir-
shick, 2015) (R-CNNs), such as the Faster R-CNN,
are among the more popular approaches and have
shown excellent results. However, these models
can have trouble with occlusions, player variations
and real-time performance limits. Recent research
has also explored single-stage detectors, such as the
YOLO architecture, offering real-time inference ca-
pabilities (Reis et al., 2023).
Achieving high accuracy while maintaining real-
time performance remains challenging, especially for
small objects. Despite progress in object detection in
soccer, certain challenges remain.
2.2 Object Classification in Soccer
Matches
Detecting and tracking players, and classifying them
by team is vital to soccer analysis. This helps us un-
derstand team dynamics, tactics, and player interac-
tions during a match.
Traditionally, player classification relied on
colour-based methods that segmented jersey colours
to differentiate between teams. But variations in jer-
sey design, lighting, and occlusion often limit these
techniques.
Researchers have explored using deep learning
techniques with colour-based features to overcome
limitations. For example, Liu et al. (Liu et al., 2023)
proposed a two-stage classification framework com-
bining colour and deep learning features, achieving
improved accuracy compared to colour-based meth-
ods.
Transformer-based architectures show promise.
Wang et al. (Wang et al., 2022) demonstrated the
potential of vision transformers for robust feature
extraction in cluttered scenes, leading to improved
player classification performance.
Research into multi-class classification tasks, e.g.,
player role identification and team formation identifi-
cation, can provide coaches and analysts with deeper
insights into team strategies and individual player
contributions (Asali et al., 2016). The use of contex-
tual information has shown potential to improve clas-
sification accuracy (Kim et al., 2022).
By incorporating these cues, models can better
disambiguate players.
3 METHODS
Our work focuses on the detection, tracking and
recognition of players, referees (people) and balls.
Many neural networks can be used for this task.
Choosing the right methods allows us to prepare a test
environment adapted to our case.
We used the Detectron2 (Wu et al., 2019) plat-
form, which supports different neural network archi-
tectures through a single standard tool. We also used
one of the new architectures, YOLOv8, which offers
improved performance and better detection of small
and occluded objects. The Deep SORT architecture
was used for player and ball tracking. We tested two
methods for player detection: the K-means algorithm
and the Vision Transformer.
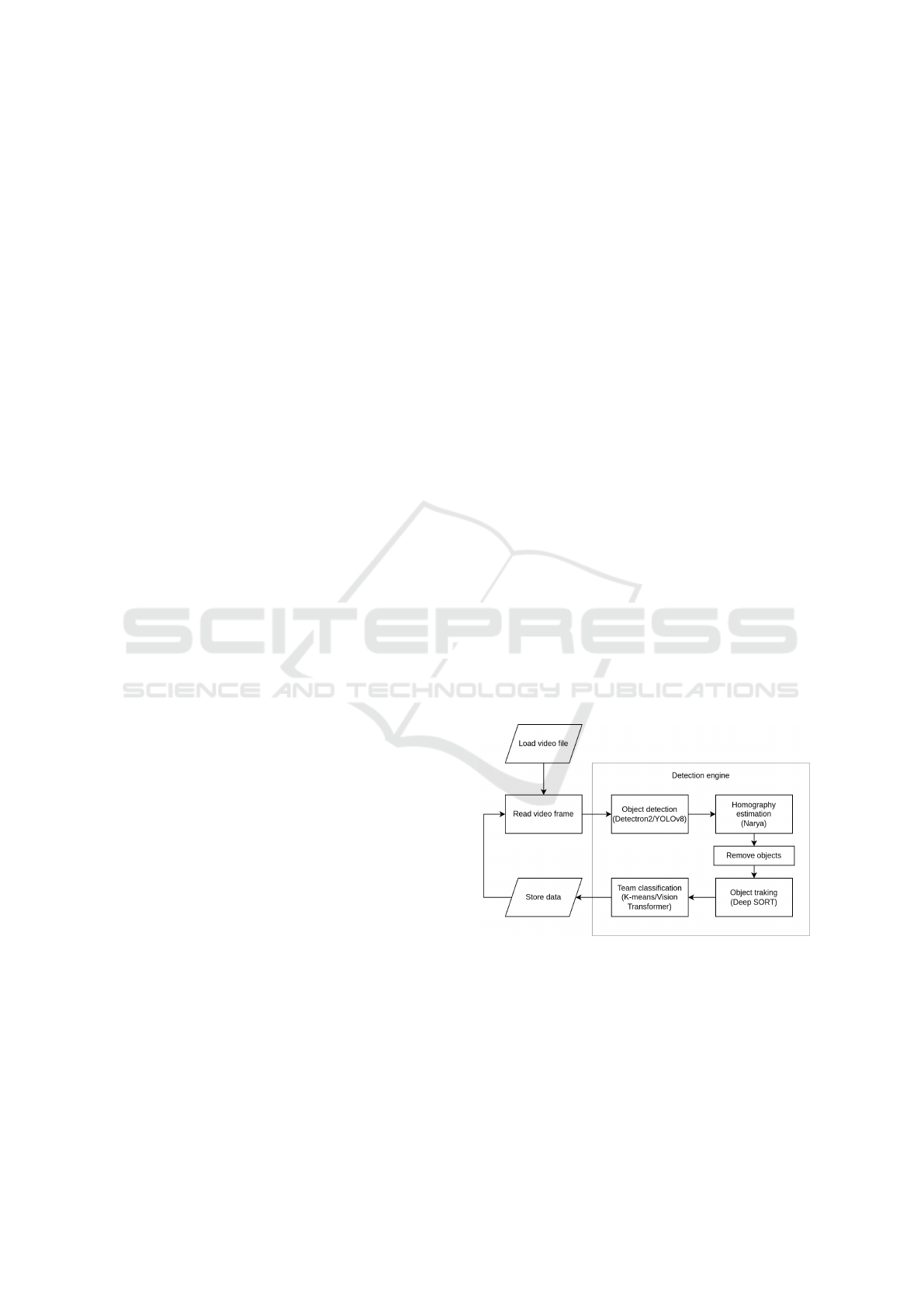
Our method consists of four main steps: Object
Detection, Object Tracking and Team Classification.
The flow diagram is shown in Figure 1. Balls, players,
goalkeepers and referees were detected. Using Narya
homography estimation (Garnier and Gregoir, 2021),
all objects not on the pitch were excluded. Then each
player was grouped with his team. Each belonging
object has a unique ID and is tracked.
Figure 1: Detection flow diagram represents the sequence
of algorithms used in our tool.
We used different algorithms for each of these
stages. For object detection, we used three archi-
tectures: Faster R-CNN (Ren et al., 2015), Mask R-
CNN (He et al., 2017) and YOLOv8 (Redmon et al.,
2016). In the player grouping phase, K-means or Vi-
sion Transformer was used. Object tracking was done
using the Deep SORT algorithm.
Advanced Vision Techniques in Soccer Match Analysis: From Detection to Classification
809

By using different algorithms, better results can
be achieved for a given strategy. Dividing the tool
into individual segments allows each algorithm to be
focused on separately. This facilitates team collabora-
tion and allows for modular swapping of algorithms.
All the algorithms mentioned are described in more
detail in the following subsections. Due to the limited
space of the article, we have omitted the description
of the homography estimation algorithm. More infor-
mation about it can be found in (Garnier and Gregoir,
2021).
This section discusses the strategy for solving the
problem of player and ball detection, tracking and
recognition using the above platforms. It describes
the structure, how each platform works and how each
architecture was used.
3.1 Detection Strategy
For the Detectron2 platform, the Object Detection
Algorithms Test Tool (ODATT) (Nowak and Dy-
czkowski, 2022) was used to train all the algorithms.
This tool evaluates the accuracy of player and ball de-
tection in soccer match videos or frames using dif-
ferent object detection algorithms (e.g. Faster R-
CNN, Mask R-CNN and YOLOv8).The generated
data can be used in evaluation programs (Padilla
et al., 2021), and it supports fine-tuning of pre-
trained Detectron2 baseline model zoo models (Wu
et al., 2019). We have fine-tuned the You Only Look
Once v8 (YOLOv8) architecture (Jocher et al., 2023).
YOLOv8 integrates Feature Pyramid Network (FPN)
and Path Aggregation Network (PAN) modules to im-
prove feature representation at different levels of ab-
straction.
3.1.1 Detectron2
Detectron2, developed by Facebook AI Research, is
a library providing state-of-the-art detection and seg-
mentation algorithms. It supports neural network ar-
chitectures such as R-CNN, Fast R-CNN, Faster R-
CNN, Mask R-CNN, and Panoptic FPN. We focused
on Faster R-CNN and Mask R-CNN.
Detectron2 simplifies switching between architec-
tures by adjusting two parameters: the model config-
uration file and model weights. Pre-trained baseline
models are available for all supported architectures.
Detectron2 downloads weights automatically if not
locally available. To analyze soccer environments, we
employed the FV2D tool (Nowak et al., 2022), which
implements algorithms for pitch analysis, as shown in
Figure 1. Its modular structure allows replacing com-
ponents by overriding abstract classes. Details about
the tool are in (Nowak et al., 2022).
We tested the Faster R-CNN X101 32x8d FPN 3x,
which combines Faster R-CNN and ResNeXt object
detection networks with FPN.It has 101 hidden layers,
a cardinality of 32 (Xie et al., 2017) and a bottleneck
width of 8 units.The architecture begins by passing
the image through a backbone CNN for feature maps,
which are sent to a region proposal network (RPN)
to generate regions of interest (RoIs). These RoIs are
scaled using RoI pooling and combined with the fea-
ture maps for classification, producing a confidence
vector and an envelope vector (Ren et al., 2016).
Mask R-CNN X101 32x8d FPN 3x extends Faster
R-CNN by adding a branch for instance segmentation
masks and using RoIAlign for more accurate feature
mapping and scaling.This improves the accuracy of
small object detection, essential for tasks such as ball
detection (He et al., 2018).Mask R-CNN’s generated
masks allow the elimination of non-player colours
(e.g. turf).
These architectures, supported by pyramid neu-
ral networks, enhance the detection of small objects,
improving the accuracy of ball detection in video
files.The choice of algorithms was guided by the re-
sults of (Nowak, 2022).
3.1.2 YOLOv8
YOLOv8 (Redmon et al., 2016), introduced architec-
tural improvements for detecting small and occluded
objects in real time. By treating object detection as
a regression problem, YOLOv8 simultaneously pre-
dicts bounding boxes and class probabilities.
YOLOv8 integrates Feature Pyramid Network
(FPN) and Path Aggregation Network (PAN) mod-
ules. FPN creates feature maps at multiple scales to
recognise objects of different sizes, while PAN aggre-
gates features across network levels using skip con-
nections for contextual information. This combina-
tion improves feature representation and increases ac-
curacy.
YOLOv8 uses anchor-free detection, directly pre-
dicting object centres and eliminating anchor box off-
set calculations. This simplifies post-processing and
speeds up real-time detection. Soft-NMS refines over-
lapping boxes, improving accuracy and reducing re-
dundancy.
With real-time speed and improved accuracy for
small/obscured objects, YOLOv8 is well suited for
challenging tasks such as ball detection in sports anal-
ysis where accuracy and performance are critical.
3.2 Deep SORT
Deep SORT (Wojke et al., 2017) was used to track
players and balls. It uses a Kalman filter to track,
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
810

smooth and fill in missing data (Pei et al., 2019).
Convolutional Neural Networks are used to extract
features of the tracked objects, such as motion and
appearance, while a Hungarian algorithm associates
these features and assigns them to the corresponding
objects tracked by the Kalman filter. Object detection
algorithms (Detectron2, YOLO or others) pass the de-
tected objects frame by frame to the Deep SORT ar-
chitecture.
Deep SORT analyses the characteristics of each
object in the frame and assigns it a corresponding
identifier. In subsequent frames, it compares the fea-
tures and Kalman filter data with previously tracked
objects. If similarities and dependencies are detected,
the identifier is retained; otherwise, a new identifier
is assigned (Wojke et al., 2017). Having unique iden-
tifiers for each object, such as players or balls, en-
ables detailed analysis of movements, distances cov-
ered and other metrics.
3.3 Classification Strategies
Two methods were used to classify players into teams:
dominant colour detection using a K-means algorithm
and a vision transformer technique. Details of each
approach are given below.
3.3.1 K-means Algorithm
The K-means algorithm was used to detect the colours
of the players’ outfits and assign them to the appropri-
ate team. For Faster R-CNN and YOLOv8 architec-
tures, the entire bounding box area was considered,
while Mask R-CNN provided object masks represent-
ing player silhouettes. The masks excluded the back-
ground of the soccer field, which improved the accu-
racy of the colour distribution of the outfits.
Colours extracted from bounding boxes or masks
were converted from RGB to HSV to reduce the influ-
ence of lighting on colour recognition. These colours
were then grouped using the K-means algorithm. The
three dominant colours identified correspond to the
teams and the category of goalkeepers, who typically
wear different uniforms.
3.3.2 Vision Transformer
The Vision Transformer approach used the CogVLM
multimodal architecture to classify players into their
respective teams. This process consists of two main
steps.
In the first stage, CogVLM processes a single
video frame to infer the dominant team colours, al-
lowing the model to learn the visual representation of
team uniforms without explicit supervision.
In the second stage, the learned team colour repre-
sentations are used to classify each detected player in-
stance. The model analyses bounding boxes, segmen-
tation masks, and input frames, using its multimodal
capabilities to associate player appearances with in-
ferred team colours. This adaptive approach achieves
accurate player classification without relying on pre-
defined colour models or heuristics, learning directly
from the data.
4 EXPERIMENT
4.1 Experimental Setup
We evaluated the approach for soccer player detection
and team affiliation on a diverse dataset with images
from our local team (KKS Lech Pozna
´
n), as well as
the SoccerDB and SoccerNet datasets.
This allowed for a more comprehensive evalua-
tion. The KKS Lech Pozna
´
n dataset ensured accu-
rate ground truth annotations, while the SoccerDB
and SoccerNet datasets provided a broader represen-
tation. This combined dataset allowed a robust evalu-
ation of the models used for player detection and team
affiliation tasks.
Figure 2: Example frame from tactical camera.
4.2 Datasets
4.2.1 Tactical Camera Recordings
The hand-labeled dataset from KKS Lech Pozna
´
n’s
tactical camera consisted of 15 soccer match record-
ings, annotated to provide ground truth labels for
player bounding boxes. This dataset encompassed
various scenarios, including different stadiums, light-
ing conditions, camera angles, and player configu-
rations, ensuring a comprehensive evaluation of the
proposed approach. The dataset has been developed
based on multiple videos from different stadiums and
stages of the game. Videos have been created using
Advanced Vision Techniques in Soccer Match Analysis: From Detection to Classification
811
the special tactical camera that provides an uninter-
rupted shot of the entire match, as shown in Figure 2,
with constant movements and no cuts in the footage.
Those clips have been recorded in various locations
and positions of the camera. Each recording has a
standardized resolution of 1280 × 720 pixels and 60
frames per second rate. Part of the training set has
been resized to improve the models’ performance.
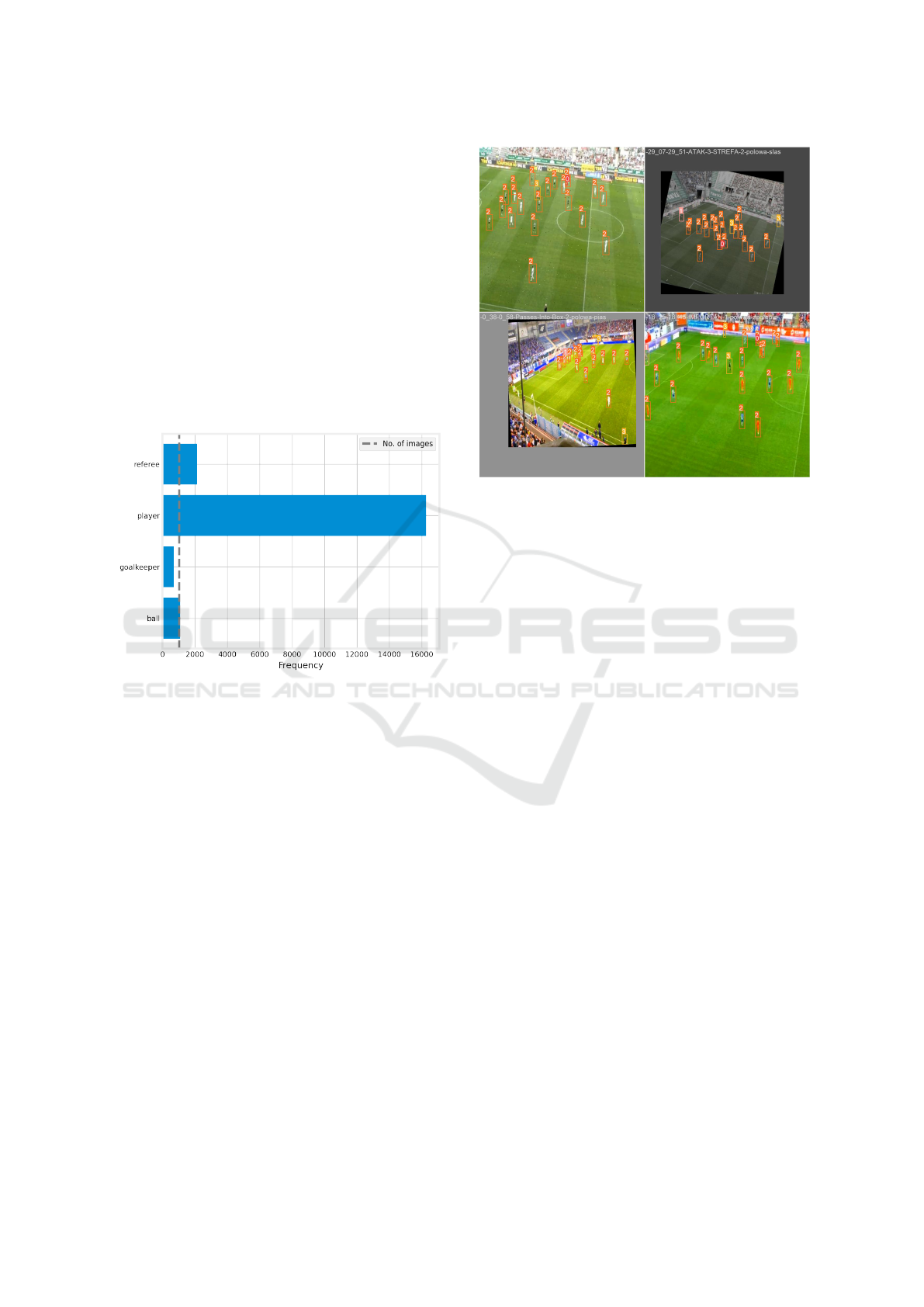
As shown in Figure 3, the labeled images con-
tained a total of 16 280 players, 1 100 balls, 2 134 ref-
erees, and 693 goalkeepers instances, annotated with
bounding boxes across 1 041 images, shown by the
gray line in Figure 3, providing a diverse set of ob-
jects to evaluate the performance of the detection and
classification models.
Figure 3: Class frequency across tactical camera dataset.
4.2.2 Data Augmentation
Data augmentation can significantly improve training
effectiveness (Zoph et al., 2020). We applied several
strategies:
Rotation. Images rotated between −15
◦
and +15
◦
to detect objects in varying orientations.
Blur. Up to 1-pixel blur applied to simulate defocus-
ing and motion blur.
Noise. 0.26% of pixels affected by noise to intro-
duce realistic distortions.
Bounding Box Blur. Boxes blurred up to 2 pixels to
account for annotation imprecision.
Rotation and blur values were based on similar
works, while noise percentage was selected to add
variance without occluding features.
These augmentations, shown in Figure 4, ex-
panded the dataset with realistic variations, increasing
the total to 1 452 images (1 259 train, 193 validation).
This improved model generalization for soccer game
scenarios.
Figure 4: Examples of augmented frames from the dataset.
Top left: noise, top right: rotation and blur, bottom left:
rotation, bottom right: bounding box blur.
4.3 Evaluation Metrics
We evaluate multiple architectures using these met-
rics:
• Recall measures the ratio of true positive detec-
tions to ground truth objects, indicating detection
completeness.
• Precision measures the ratio of true positives to
all positive detections, indicating false positive
avoidance.
• mean Precision (mP) averages precision values
across all detected classes.
• Average Precision (AP) measures average preci-
sion per class, providing comprehensive perfor-
mance assessment.
• mean Average Precision (mAP) averages AP
across all classes for overall performance evalu-
ation.
• Average Precision at IoU=0.50 (AP50) and Av-
erage Precision at IoU range from 0.5 to 0.95
(AP50:95) measure detection precision at specific
IoU thresholds.
• mean Average Precision at IoU=0.50 (mAP50)
and mean Average Precision at IoU=0.75
(mAP75) average AP50 and AP75 across classes,
indicating performance at different localization
strictness levels.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
812
4.4 Object Detection Results
We evaluated the object detection performance using
a variety of standard metrics for object detection mod-
els. Additionally, we analyzed the localization accu-
racy using different IoU thresholds – higher thresh-
olds indicating stricter evaluation rules.
4.4.1 Detectron2 – Faster R-CNN and Mask
R-CNN
The faster_rcnn_X_101_32x8d_FPN_3x and
mask_rcnn_X_101_32x8d_FPN_3x architectures
were pre-trained on train2017 and evaluated on
val2017 datasets with the 3x schedule (≈ 37 COCO
1
epochs).
Next, models were fine-tuned using our dataset
and ODATT tool. Networks were trained during nine
epochs, with a batch size of 3 and a learning rate of
0.0125. The number of epochs and the learning rate
were selected based on the research in (Nowak, 2022).
As the dataset grows, we intend to fine-tune the hy-
perparameters further. We decided on batch size three
due to hardware limitations.
4.4.2 YOLOv8
The model was trained using yolov8l and NAdam with
a 0.06 dropout rate. All other parameters came from
the Ultralytics (Jocher et al., 2023). library.
The model excelled at detecting players, followed
by referees and goalkeepers. Detecting the ball was
the hardest part, since it’s often hidden, moves a lot,
and remains a small, colourful object on the pitch.
Table 1: YOLOv8 model evaluation.
Class Precision Recall AP50 AP50-95
ball 80.245 40.625 50.918 20.051
goalkeeper 82.421 87.302 88.153 53.668
player 89.717 91.237 90.697 54.222
referee 85.559 90.676 89.517 53.624
all 84.485 77.459 79.821 45.391
Table 1 shows the YOLOv8 model’s high perfor-
mance in detecting players.
It achieves high recall and precision over a wide
range of intersection over union thresholds. This indi-
cates its effectiveness in detecting and localising play-
ers on the soccer pitch. The model’s superior perfor-
mance in detecting players can be attributed to several
factors. Players are larger than the ball, making them
1
COCO is a dataset containing labeled images of com-
plex everyday scenes containing common objects in their
natural context (Lin et al., 2015).
easier to detect. They have distinct visual features,
such as jerseys and body shapes, which the model can
learn to recognise.
The dataset contains enough player instances for
the model to learn robust representations. The model
performs better at detecting players than balls, with
recall values ranging from 0.50 to 0.35 and precision
values ranging from 0.80 to 0.82 for IoU thresholds
up to 0.90. This is because balls are smaller and
harder to detect. The ball is often obscured or par-
tially visible due to player proximity, especially dur-
ing close interactions or tackles. Appearance varies
due to factors such as motion blur, lighting and dis-
tance from the camera. The dataset may contain fewer
ball instances than player instances, potentially limit-
ing the model’s ability to learn robust representations.
4.5 Object Detection Performance
Comparison
The models were compared across two datasets.
Firstly, on hand labeled, prepared for this study real-
world KKS Lech Pozna
´
n’s tactical camera dataset and
a more general comparison using a combination of
SoccerDB (Jiang et al., 2020), SoccerNet (Deliege
et al., 2021) and additional Polish Ekstraklasa League
match recordings, which accumulate to over 20 000
annotated images.
Table 2: Object detection model comparison.
Model mAP mAP50 mAP75 mP
Faster RCNN 38.797 75.690 38.480 75.780
Mask RCNN 40.797 75.441 40.903 76.873
YOLOv8 45.389 79.821 47.896 84.485
In summary, the results shown in Table 2 demon-
strate the superior performance of YOLOv8 over
Faster R-CNN and Mask R-CNN for object detec-
tion in soccer game scenarios, particularly in terms
of overall accuracy, moderate localization accuracy,
and highly accurate object localization. YOLOv8’s
consistently higher scores across all evaluation met-
rics suggest its suitability for real-world applications
in sports analytics and computer vision tasks.
Table 3: Object types detection model comparison (AP50).
Model Ball Referee Player
Faster RCNN 20.064 44.889 55.509
Mask RCNN 22.260 43.990 54.202
YOLOv8 15.970 48.409 53.583
Table 3 compares the performance of Faster R-
Advanced Vision Techniques in Soccer Match Analysis: From Detection to Classification
813

CNN, Mask R-CNN, and YOLOv8 in detecting spe-
cific object classes in the soccer game scenario using
the tactical camera dataset. While the models’ AP
values are similar to player detection, the YOLOv8
demonstrates significantly better goalkeeper detec-
tion, alongside a slight advantage in referee detec-
tion. The Mask R-CNN model better detects the ball,
achieving the highest AP among the evaluated archi-
tectures.
4.6 Team Affiliation Classification
Results
Random frames were selected from each video
recording to create the dataset. In total, 309 close-
up images of individual players were obtained. Each
player image was tagged with a game identifier, which
later allowed for the integration of these data into
a broader game context for individual classification.
Due to the zero-shot nature of the task and the small
dataset, we did not split the images into training and
validation sets.
Table 4: Object classification approach comparison (TP –
True Positive, FP – False Positive, FN – False Negative).
Model TP FP FN Precision
K-means BBox 202 61 46 76.806
K-means Mask 210 52 47 80.152
CogVLM 202 101 6 66.667
Table 4 compares the results of K-means and
CogVLM Multimodal Vision Transformer in the clas-
sification task.
K-means has two versions, BBox and Mask. The
player team was assigned using the area of the bound-
ing box detected by Faster R-CNN. Mask’s player
team is determined by Mask R-CNN. True Positive
(TP) is the number of player appearances correctly
assigned to their team. False Positive is the number
misclassified as a player. False Negative is the num-
ber of players not assigned to any team. False nega-
tives are due to misclassification or misalignment of
the bounding box, so we evaluated methods mainly on
precision and true positives. The K-means method is
superior to the multimodal approach, especially when
using a mask (80.152 vs. 76.806 vs. 66.667). Both
models classified 202-210 players across all teams,
showing significant potential. The advantage may be
due to a masked algorithm.
5 CONCLUSIONS, LIMITATIONS,
AND FUTURE WORK
We have shown that it is possible to detect key objects
in soccer match footage, despite challenges such as
imperfect video resolution, complex image conditions
and dynamic weather.
The best models accurately detected players, ref-
erees and goalkeepers. These results, along with sig-
nificant advances in the classification of detected in-
stances, provide a solid foundation for broader video
analysis of soccer matches.
However, the proposed models face limitations,
particularly in the ball detection task. It’s hard to de-
tect such a small, fast-moving object at 1280 × 720
resolution, where the ball appears as just a few pixels.
This problem is made worse by the ball’s similarity
to other objects in the scene. Future work will fo-
cus on improving ball tracking by integrating trajec-
tory estimation techniques such as (Liu, 2009), which
use temporal data to predict the ball’s position even
when it is occluded or undetected. The use of super-
resolution models and contextual data, such as player
movement and game dynamics, could also improve
detection accuracy.
K-means clustering performs well when players
wear multicoloured uniforms or when the class distri-
butions are very similar. The CogVLM model main-
tains high confidence when multiple players appear
within the same bounding box. Future work will
explore integrating these approaches to improve the
classification.
We’re developing a game-changing homograph
model to determine players’ positions on the pitch.
By combining this with external data from providers
like StatsBomb, we aim to compute a dynamic per-
spective matrix. This could enable more accurate spa-
tial analysis of player positioning and movement.
The solutions presented in this article can be
adapted to other team sports, such as basketball or
hockey, where player tracking and classification face
similar challenges. The flexibility of the proposed
models allows them to be fine-tuned for different data
types, player representations and team affiliations.
Finally, by associating detected player instances
with their respective teams and integrating temporal
information, it is possible to track individual players
throughout a match. This opens the door to compre-
hensive player and team analysis. Combining player
detection with ball tracking could provide a com-
plete understanding of a match, enabling better tactics
and decisions. Future work will focus on developing
tracking algorithms for soccer, paving the way for a
data-driven approach to soccer analysis.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
814

ACKNOWLEDGEMENTS
The publication and the underlying research owe their
existence to the invaluable support extended by the
KKS Lech Pozna
´
n club, which provided access to
datasets.
REFERENCES
Asali, E., Valipour, M., Zare, N., Afshar, A., Katebzadeh,
M., and Dastghaibyfard, G. (2016). Using machine
learning approaches to detect opponent formation.
In 2016 Artificial Intelligence and Robotics (IRA-
NOPEN), pages 140–144. IEEE.
Deliege, A., Cioppa, A., Giancola, S., Seikavandi, M. J.,
Dueholm, J. V., Nasrollahi, K., Ghanem, B., Moes-
lund, T. B., and Van Droogenbroeck, M. (2021).
Soccernet-v2: A dataset and benchmarks for holistic
understanding of broadcast soccer videos. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 4508–4519.
Garnier, P. and Gregoir, T. (2021). Evaluating soccer player:
from live camera to deep reinforcement learning.
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
IEEE international conference on computer vision,
pages 1440–1448.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE interna-
tional conference on computer vision, pages 2961–
2969.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. (2018).
Mask R-CNN.
Jiang, Y., Cui, K., Chen, L., Wang, C., and Xu, C. (2020).
SoccerDB: A large-scale database for comprehensive
video understanding. In Proceedings of the 3rd Inter-
national Workshop on Multimedia Content Analysis in
Sports, MM ’20. ACM.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). Ultralytics
YOLOv8.
Kim, H., Kim, B., Chung, D., Yoon, J., and Ko, S.-K.
(2022). SoccerCPD3: Formation and role change-
point detection in soccer matches using spatiotempo-
ral tracking data. In Proceedings of the 28th ACM
SIGKDD Conference on Knowledge Discovery and
Data Mining, pages 3146–3156.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Dollár, P. (2015). Microsoft COCO: Common Ob-
jects in Context.
Liu, H., Adreon, C., Wagnon, N., Bamba, A. L., Li, X.,
Liu, H., MacCall, S., and Gan, Y. (2023). Auto-
mated player identification and indexing using two-
stage deep learning network. Scientific Reports,
13(1):10036.
Liu, S. (2009). Object trajectory estimation using optical
flow. Utah State University.
Nowak, J. (2022). Methods for detecting objects in video
image and their application in the analysis of sports
recordings. Master’s thesis, Adam Mickiewicz Uni-
versity in Poznan.
Nowak, J. and Dyczkowski, K. (2022). ODATT - Object
Detection Algorithms Test Tool.
Nowak, J., Galla, Z., and Dyczkowski, K. (2022). FV2D -
Fotball video to 2 dimensionnal pitch.
Padilla, R., Passos, W. L., Dias, T. L. B., Netto, S. L., and
da Silva, E. A. B. (2021). A comparative analysis
of object detection metrics with a companion open-
source toolkit. Electronics, 10(3).
Pei, Y., Biswas, S., Fussell, D. S., and Pingali, K. (2019).
An elementary introduction to kalman filtering.
Piłka, T., Grzelak, B., Sadurska, A., Górecki, T., and Dy-
czkowski, K. (2023). Predicting injuries in football
based on data collected from GPS-based wearable
sensors. Sensors, 23(3).
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Reis, D., Kupec, J., Hong, J., and Daoudi, A. (2023). Real-
time flying object detection with YOLOv8. arXiv
preprint arXiv:2305.09972.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Ren, S., He, K., Girshick, R., and Sun, J. (2016). Faster R-
CNN: Towards real-time object detection with region
proposal networks.
Sadurska, A., Piłka, T., Grzelak, B., Górecki, T., Dy-
czkowski, K., and Zar˛eba, M. (2023). Fusion of a
fuzzy rule-based method and other decision-making
models in injury prediction problem in football. In
2023 IEEE International Conference on Fuzzy Sys-
tems (FUZZ), pages 1–6.
Wang, Y., Chen, X., Cao, L., Huang, W., Sun, F., and
Wang, Y. (2022). Multimodal token fusion for vision
transformers. In Proceedings of the IEEE/CVF con-
ference on computer vision and pattern recognition,
pages 12186–12195.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y., and Gir-
shick, R. (2019). Detectron2. https://github.com/
facebookresearch/detectron2.
Xie, S., Girshick, R., Dollár, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks.
Zoph, B., Cubuk, E. D., Ghiasi, G., Lin, T.-Y., Shlens, J.,
and Le, Q. V. (2020). Learning data augmentation
strategies for object detection. In Computer Vision–
ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, Part XXVII 16,
pages 566–583. Springer.
Advanced Vision Techniques in Soccer Match Analysis: From Detection to Classification
815
