
Upper Bound Computation for the Multiple Close-Enough Traveling
Salesman Problem
Francesco Carrabs
a
, Raffaele Cerulli
b
, Ciriaco D’Ambrosio
c
and Gabriele Murano
d
Department of Mathematics, University of Salerno, Giovanni Paolo II, 132, 84084, Fisciano(SA), Italy
{fcarrabs, raffaele, cdambrosio, gmurano}@unisa.it
Keywords:
Close-Enough, Multiple Traveling Salesman Problem, Neighborhoods, Drones.
Abstract:
This paper addresses the Multiple Close-Enough Traveling Salesman Problem, a variant of the Close-Enough
Traveling Salesman Problem, where multiple vehicles are used to visit a given number of points. A vehicle
visits a point if it passes through the neighborhood set of that point. The goal of the problem is to minimize
the longest of the defined routes. We face the problem by using a discretization schema that reduces it to the
Multiple Generalized Traveling Salesman Problem for which we propose a Mixed Integer Linear Program-
ming formulation. The use of discretization schema introduces a discretization error that makes the optimal
solution value of our model an upper bound of the optimal solution value of the Multiple Close-Enough Trav-
eling Salesman Problem. Moreover, we apply a graph reduction algorithm to remove arcs and nodes without
changing the optimal solution of the problem. We provide proof of the correctness of this algorithm, and we
show that it significantly reduces the size of the instances tested. We verified the performance of our model on
the benchmark instances of Close-Enough Traveling Salesman Problem.
1 INTRODUCTION
In this paper we address a variant of the Close-
Enough Traveling Salesman Problem (CETSP) called
the Multiple Close-Enough Traveling Salesman Prob-
lem (mCETSP). Given a set of target points in a Eu-
clidean space, where each target has a neighborhood
represented by a circular compact region centered on
the target, the CETSP consists of finding a minimum
length tour that starts and ends at a depot and inter-
sects each neighborhood once. The variant mCETSP
that, to the best of our knowledge, we address for
the first time in the literature, considers m vehicles
and the neighborhoods are represented by a set of dis-
cretization points and it consists in finding m tours (or
routes), one for each vehicle, such that each neighbor-
hood is intersected by al least one tour. The goal of
the problem is to build the m tours so that the length
of the longest one is minimized.
The mCETSP has several practical applications in
the context of Unmanned Aerial Vehicles (UAV) in
particular when the use of multiple drones is required.
a
https://orcid.org/0000-0003-2187-8624
b
https://orcid.org/0000-0002-3277-6802
c
https://orcid.org/0000-0003-1274-6144
d
https://orcid.org/0009-0009-1238-1545
For example, in precision agriculture, a fleet of drones
is tasked with flying over specific areas of interest (see
Figure 1), gathering, from the sensors on the ground,
essential information on parameters such as soil mois-
ture, plant health, and other key indicators that influ-
ence agricultural decisions. In such a context, it be-
comes essential to plan the routes of the drones so that
every area of interest is covered and the time to gath-
ering the information is minimized. A comprehensive
review of UAV applications in Smart Farming, along
with the critical role of route planning for these vehi-
cles, can be found in (Dolias et al., 2022).
The CETSP was defined and addressed for the first
time in (Gulczynski et al., 2006). The authors de-
Figure 1: Collecting information from ground sensors using
drones.
186
Carrabs, F., Cerulli, R., D’Ambrosio, C. and Murano, G.
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem.
DOI: 10.5220/0013377900003893
In Proceedings of the 14th International Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 186-195
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

velop and test some heuristics on several test cases.
Later, in (Dong et al., 2007) based on a mixed-integer
nonlinear program (MINLP), the authors propose a
clustering-based algorithm and a convex hull-based
algorithm, to find near-optimal solutions. (Mennell,
2009) and (Mennell et al., 2011) propose a heuris-
tic algorithms based on Steiner zones, that is, the
nonempty zones obtained by the intersections of the
neighborhood sets, and this idea is applied also in
the paper of (Wang et al., 2019), while (Yuan et al.,
2007) introduces a first effective evolutionary ap-
proach. More recent and sophisticated approaches
to the CETSP have been presented by (Behdani and
Smith, 2014), (Coutinho et al., 2016), (Carrabs et al.,
2017a; Carrabs et al., 2017b), (Yang et al., 2018)
and (Carrabs et al., 2020). In (Behdani and Smith,
2014) the authors narrow the search space, proving
that all optimal solutions can be described by a finite
set of segments whose endpoints lie on the bound-
ary of the disks representing the neighbourhoods of
the targets. They present a mixed-integer program-
ming (MIP) model for the CETSP based on a dis-
cretization scheme. The MIP model offers both lower
and upper bounds for the optimal tour length, based
on the granularity of the discretization. Furthermore,
they propose valid inequalities along with two alter-
native formulations that further enhance the lower
bounds and the resolution of the original problem.
In (Coutinho et al., 2016), the authors propose an
exact algorithm based on branch-and-bound and a
Second-Order Cone Programming (SOCP) formula-
tion. The proposed algorithm is the first method that
provides exact optimal solutions for the CETSP in a
finite number of steps. A main contribution to CETSP
is represented by the discretization scheme proposed
in (Carrabs et al., 2017b), which suggests discretiz-
ing not the outer circumference of a disk, but an in-
ner circumference with a radius equal to the apothem
of the regular polygon inscribed within the circum-
ference, with the number of sides equal to the num-
ber of points used for discretization. In addition the
article proposes a graph reduction algorithm (elim-
inating redundant edges) that significantly reduces
the problem size. In (Carrabs et al., 2017a) the au-
thors present an improved version of the discretiza-
tion scheme proposed in (Carrabs et al., 2017b) and
propose a new heuristic approach that is able to com-
pute tight bounds for the problem. (Yang et al., 2018)
develops an heuristic that combines a genetic algo-
rithm with a particle swarm optimization. The com-
putational results show that this heuristic is effective
on the instances proposed by (Mennell, 2009). In
(Carrabs et al., 2020), the authors propose a meta-
heuristic called (lb/ub)Alg to compute both upper and
lower bounds on the optimal solution for the CETSP.
This metaheuristic employs an innovative strategy
to discretize the neighborhoods of the targets, mini-
mizing discretization error, and applies the Carousel
Greedy Algorithm to progressively select neighbor-
hoods to add to the partial solution until a feasible so-
lution is obtained. Very recently, in (Lei and Hao,
2024) the authors propose an effective memetic al-
gorithm that integrates a carefully designed crossover
operator and an effective local optimization procedure
with original search operators. This algorithm is com-
petitive with the others proposed in the literature and
provides 30 new upper bounds. Finally, (Cariou et al.,
2024) explores optimal route planning for UAVs used
to collect data from IoT-based agricultural sensors.
The study models sensor communication ranges as
hemispheres and tackles the CETSP to establish ef-
ficient UAV trajectories.
In this paper, we address the mCETSP, a variant of
the CETSP, which consists of finding m routes such
that: i) each route starts and ends in the depot; ii)
each neighborhood is crossed by at least one route.
The problem aims to minimize the maximum route
length among the m routes defined. Indeed, this goal
better suits the characteristics of the real application
since we want to gain the information from the sen-
sors as soon as possible and this is done by using the
drones simultaneously. However, the total time re-
quired to complete this task is not given by the sum
of the length of the routes but from the longest one
among them. Due to the complexity of this problem,
we face here a discretized version of mCETSP, named
mGTSP in which a set of discretization points are
used to represent each neighborhood. The only differ-
ence between the two problems is that for mGTSP the
routes are built by using only the discretization points
of the neighborhoods whereas for mCETSP any point
of the neighborhood can be used. Obviously, as a side
effect of using the discretization, the optimal solution
value of mGTSP will be an upper bound of the opti-
mal solution value of mCETSP. The idea to discretize
the neighborhoods was already successfully applied
for the CETSP too and it allowed us to obtain tight
upper bounds of the optimal solution. For mGTSP
we will provide a mixed integer linear programming
model. Unfortunately, from a literature review, we
found out that the min-max version of problems simi-
lar to mGTSP, like the mTSP, is usually more compli-
cated to solve with respect to the classical version in
which the goal is to minimize the total distance trav-
elled. To the best of our knowledge, mGTSP has not
been previously studied in the literature.
The contribution of the current work can be sum-
marized as follows:
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem
187

• We propose a Mixed Integer Programming (MIP)
formulation for mGTSP having a polynomial
number of constraints;
• In order to reduce the size of the instances, we
applied a graph reduction algorithm already tested
for the discretized version of CETSP by (Carrabs
et al., 2017b). In particular, we provide here a
correctness proof of this algorithm, to prove that it
works for the mGTSP problem too, despite in this
last problem there are more routes and a different
objective function.
• We provide a comprehensive numerical analysis
of our proposed model, testing it on benchmark
instances with a time limit of 1 hour.
The remainder of this paper is organized as fol-
lows. In Section 2, we introduce terminology and no-
tation to be used throughout the paper and the formal
definition of mGTSP. In Section 3 we present our MIP
model for solving the problem. Computational results
as reported in Section 4. Finally, conclusions are pro-
vided in Section 5.
2 DEFINITIONS AND NOTATION
Let N be a set of points in a two-dimensional plane,
with |N| = n, and let 0 denote the depot point. The
elements of N will be referred to as the target points.
Each target point v is associated with a circumference
C
v
having center v and radius r
v
. The neighborhood
N(v) of v consists of all points that are inside or on C
v
.
Without loss of generality, we assume that 0 /∈ N(v)
for all v ∈ N. The mCETSP consists of finding m
routes such that: i) each route starts and ends in the
depot; ii) each neighborhood is crossed by at least
one route. The length of a route T is defined as the
total sum of the edge lengths that compose T . We de-
note this length as c(T ). The goal of the problem is
to build the m tours so that the length of the longest
one is minimized. Let us define the turn points as the
points of a tour where a direction change occurs. Any
tour can be uniquely identified through its turn points.
Due to the limited battery capacity of the drones, a
maximum route distance (or travel time) T
max
is im-
posed. In what follows, the terms maximum route dis-
tance and maximum drone travel time will be used in-
terchangeably. The same is done for the terms tour
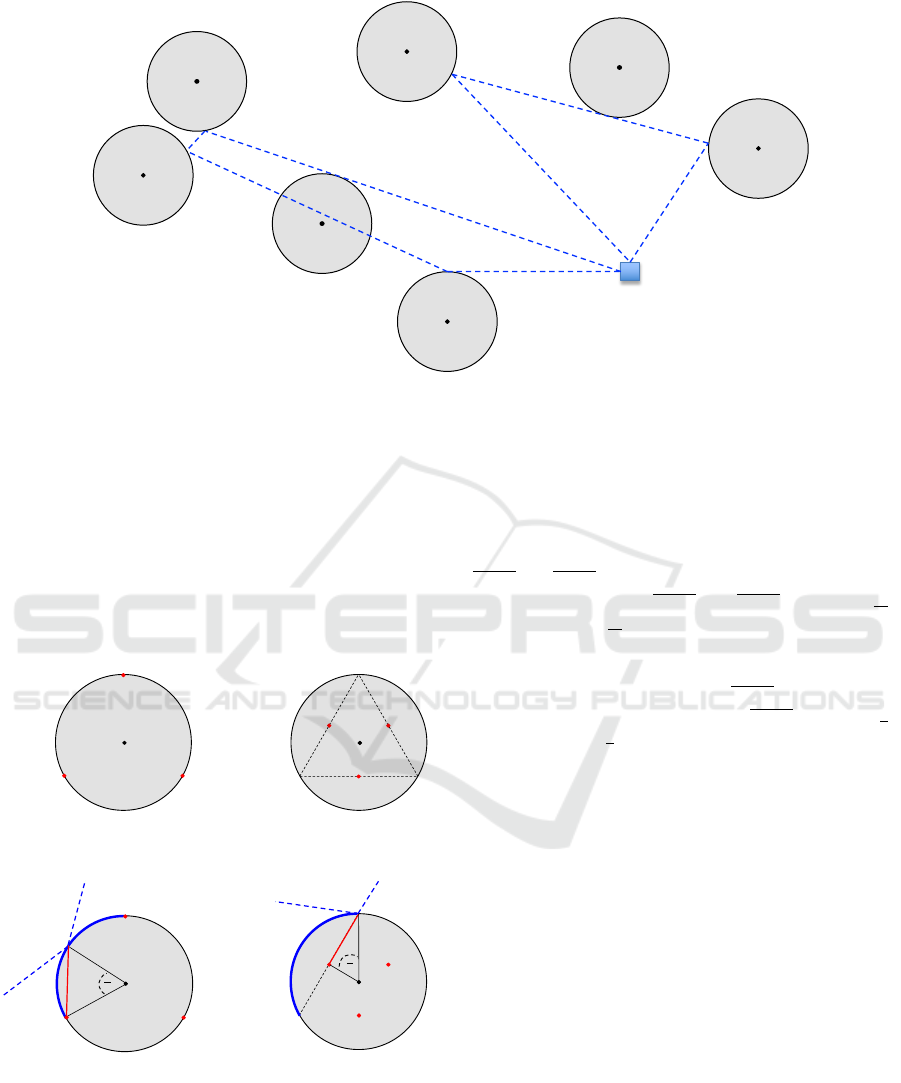
and route. In Figure 2, a solution for the mCETSP
problem is illustrated. The instance includes seven
target points
{
v
1
,v
2
,...,v
7
}
, with their corresponding
neighborhoods represented by disks centered at these
points. The points
{
p
1
, p
2
,..., p
5
}
are the turn points
and , together with the depot 0, define the two tours:
T
1
=< 0, p
1
, p
2
,0 > and T
2
=< 0, p
3
, p
4
, p
5
,0 >, de-
picted as dashed blue lines. In the following, we
denote a solution of mCETSP as the set of its tours
{T
1
,...,T
m
}. Therefore, the solution of the example
is denoted by {T
1
,T
2
}.
2.1 The Discretized Version of mCETSP
The number of feasible solutions for the mCETSP is
infinite because there are infinitely many possible turn
points in each neighborhood that can be used to build
the tours. However, the number of turn points in any
feasible solution is finite (see Figure 2). To formu-
late the mCETSP as an integer linear programming
problem, each neighborhood N(v) is discretized into
a fixed number k of discretization points. We denote
the set of discretization points for neighborhood N(v)
as
b
N(v), and the union of all discretization points for
the instance as
b
N =
S
n
v=1
b
N(v).
Moreover, let T (i) be a function that, given a dis-
cretization point i ∈
b
N, returns the target point v, if
i ∈
b
N(v), or the depot 0 if i is the depot. Formally,
T :
b
N ∪ {0} → N ∪ {0}
T (i) =
®
v ∈ N : i ∈
b
N(v), if i ̸= 0,
0, if i = 0.
The discretized version of the mCETSP corre-
sponds to a variant of the well-known Generalized
Traveling Salesman Problem (GTSP) with m vehicles
instead of a single one. For this reason, we denote the
discretized version of the mCETSP as mGTSP. To ob-
tain a feasible solution for the mGTSP, it is sufficient
to ensure that at least one discretization point in each
neighborhood is visited by one of m routes.
The discretization points positioning in the neigh-
borhoods is crucial to obtain high-quality solutions
for the mCETSP. Indeed, the gap between the op-
timal solution values of mCETSP and mGTSP de-
pends on this positioning. It has been proved, in the
literature (Behdani and Smith, 2014), that the op-
timal solution of the CETSP places the turn points
of the routes on the circumferences of the neighbor-
hoods. Hence, the most intuitive strategy would in-
volve placing the discretization points along the cir-
cumferences of the neighborhoods. Such a scheme,
referred to as the Perimetral Discretization Scheme
(PD), divides each circumference C
v
associated with
a neighborhood N(v) into k equal circular arcs. The
discretization points are positioned at the endpoints
of these arcs. In Figure 3(a) is shown the Perime-
tral Discretization Schema with three discretization
points, d
1
, d
2
and d
3
, and the relative circular arcs
˘
d
1
,d
2
,
˘
d
2
,d
3
and
˘
d
3
,d
1
.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
188
v
1
v
3
v
2
v
4
v
5
v
6
v
7
0
𝑝
!
𝑝
"
𝑝
#
𝑝
$
𝑝
%
<latexit sha1_base64="bNvJD3+0XyRfabhuGEoNLQMTS/Q=">AAACC3icbVC7TsNAEDyHVwivAAUFzYkEiSqyUwTKCBrKICUhUmJZ58smnHJ+6G6NiCx/Al9BCxUdouUjKPgXbOMCEqYazeze7I0bSqHRND+N0srq2vpGebOytb2zu1fdP+jrIFIcejyQgRq4TIMUPvRQoIRBqIB5roRbd3aV+bf3oLQI/C7OQ7A9NvXFRHCGqeRUj+ojhAfMH4pdGUESdx0rqTvVmtkwc9BlYhWkRgp0nOrXaBzwyAMfuWRaDy0zRDtmCgWXkFRGkYaQ8RmbwjClPvNA23Gem9DTSDMMaAiKCklzEX5vxMzTeu656aTH8E4vepn4nzeMcHJhx8IPIwSfZ0EoJORBmiuRNgN0LBQgsuxyoMKnnCmGCEpQxnkqRmlVlbQPa/H3y6TfbFitRuumWWtfFs2UyTE5IWfEIuekTa5Jh/QIJwl5Is/kxXg0Xo034/1ntGQUO4fkD4yPb+nomyM=</latexit>
T
1
<latexit sha1_base64="DHSATC82iWvrU8jeoibt7oo57Dc=">AAACC3icbVC7TsNAEDyHVwivAAUFzYkEiSqyUwTKCBrKICUhUmJZ58smnHJ+6G6NiCx/Al9BCxUdouUjKPgXbOMCEqYazeze7I0bSqHRND+N0srq2vpGebOytb2zu1fdP+jrIFIcejyQgRq4TIMUPvRQoIRBqIB5roRbd3aV+bf3oLQI/C7OQ7A9NvXFRHCGqeRUj+ojhAfMH4pdGUESd51mUneqNbNh5qDLxCpIjRToONWv0TjgkQc+csm0HlpmiHbMFAouIamMIg0h4zM2hWFKfeaBtuM8N6GnkWYY0BAUFZLmIvzeiJmn9dxz00mP4Z1e9DLxP28Y4eTCjoUfRgg+z4JQSMiDNFcibQboWChAZNnlQIVPOVMMEZSgjPNUjNKqKmkf1uLvl0m/2bBajdZNs9a+LJopk2NyQs6IRc5Jm1yTDukRThLyRJ7Ji/FovBpvxvvPaMkodg7JHxgf3+t5myQ=</latexit>
T
2
Figure 2: An example of feasible solution of mCETSP problem with seven target points and two routes.
(Carrabs et al., 2017b) proved that better results
can be achieved by positioning these discretization
points within the neighborhoods rather than on their
circumferences. This scheme, named Internal Point
Discretization Schema (IP), works as follows. Given
the number of discretization points k, IP divides C
v
into k equal circular arcs and places a discretization
point at the midpoint of the chord corresponding to
each arc. Figure 3(b) shows the IP schema for k = 3.
𝑝
!
𝑑
"
𝑑
#
𝑑
$
𝑣
𝑝
!
𝑑
"
𝑑
#
𝑑
$
𝑣
<latexit sha1_base64="SayPRMVZ5nQKTMgx2dfYjtbsAxQ=">AAACA3icbVC7TsNAEDzzDOFloKQ5kSBRRXaKQBlBQxkk8pDiKFpfNuGU80N360iRlZK/oIWGDtHyIUh8DE5wAQlTjWZ2tbPjx0oacpxPa219Y3Nru7BT3N3bPzi0j45bJkq0wKaIVKQ7PhhUMsQmSVLYiTVC4Cts++Obud+eoDYyCu9pGmMvgFEoh1IAZVLftotlb6hBpF4sZ+l4Vu7bJafiLMBXiZuTEsvR6Ntf3iASSYAhCQXGdF0npl4KmqRQOCt6icEYxBhG2M1oCAGaXrpIPuPniQGKeIyaS8UXIv7eSCEwZhr42WQA9GCWvbn4n9dNaHjVS2UYJ4ShmB8iqXBxyAgts0qQD6RGIpgnRy5DLkADEWrJQYhMTLKOsjrc5edXSatacWuV2l21VL/OiymwU3bGLpjLLlmd3bIGazLBJuyJPbMX69F6td6s95/RNSvfOWF/YH18Ay0Jl6M=</latexit>
⇡
k
<latexit sha1_base64="SayPRMVZ5nQKTMgx2dfYjtbsAxQ=">AAACA3icbVC7TsNAEDzzDOFloKQ5kSBRRXaKQBlBQxkk8pDiKFpfNuGU80N360iRlZK/oIWGDtHyIUh8DE5wAQlTjWZ2tbPjx0oacpxPa219Y3Nru7BT3N3bPzi0j45bJkq0wKaIVKQ7PhhUMsQmSVLYiTVC4Cts++Obud+eoDYyCu9pGmMvgFEoh1IAZVLftotlb6hBpF4sZ+l4Vu7bJafiLMBXiZuTEsvR6Ntf3iASSYAhCQXGdF0npl4KmqRQOCt6icEYxBhG2M1oCAGaXrpIPuPniQGKeIyaS8UXIv7eSCEwZhr42WQA9GCWvbn4n9dNaHjVS2UYJ4ShmB8iqXBxyAgts0qQD6RGIpgnRy5DLkADEWrJQYhMTLKOsjrc5edXSatacWuV2l21VL/OiymwU3bGLpjLLlmd3bIGazLBJuyJPbMX69F6td6s95/RNSvfOWF/YH18Ay0Jl6M=</latexit>
⇡
k
𝑑
$
𝑣
𝑑
"
𝑑
#
𝑣
𝑑
"
𝑑
#
𝑑
$
<latexit sha1_base64="2KWE0vXmPwoIzLddHXIKyLN/wH4=">AAAB9XicbVC7TsNAEDyHVwivACXNiQgpNJGNUKCMoKEMgjykxIrWl0045fzQ3RoURfkEWqjoEC3fQ8G/YBsXEJhqNLOrnR0vUtKQbX9YhaXlldW14nppY3Nre6e8u9c2YawFtkSoQt31wKCSAbZIksJupBF8T2HHm1ymfucetZFhcEvTCF0fxoEcSQGUSDdVOB6UK3bNzsD/EicnFZajOSh/9oehiH0MSCgwpufYEbkz0CSFwnmpHxuMQExgjL2EBuCjcWdZ1Dk/ig1QyCPUXCqeifhzYwa+MVPfSyZ9oDuz6KXif14vptG5O5NBFBMGIj1EUmF2yAgtkw6QD6VGIkiTI5cBF6CBCLXkIEQixkkppaQPZ/H7v6R9UnPqtfr1aaVxkTdTZAfskFWZw85Yg12xJmsxwcbskT2xZ+vBerFerbfv0YKV7+yzX7DevwAvIZHa</latexit>
(a)
<latexit sha1_base64="0PHSd84WPhkYQq9yJdEJJSRkJng=">AAAB9XicbVC7TsNAEFyHVwivACXNiQgpNJGNUKCMoKEMgjykxIrOl0045fzQ3RoURfkEWqjoEC3fQ8G/YBsXEJhqNLOrnR0vUtKQbX9YhaXlldW14nppY3Nre6e8u9c2YawFtkSoQt31uEElA2yRJIXdSCP3PYUdb3KZ+p171EaGwS1NI3R9Pg7kSApOiXRT9Y4H5YpdszOwv8TJSQVyNAflz/4wFLGPAQnFjek5dkTujGuSQuG81I8NRlxM+Bh7CQ24j8adZVHn7Cg2nEIWoWZSsUzEnxsz7hsz9b1k0ud0Zxa9VPzP68U0OndnMohiwkCkh0gqzA4ZoWXSAbKh1EjE0+TIZMAE15wItWRciESMk1JKSR/O4vd/Sfuk5tRr9evTSuMib6YIB3AIVXDgDBpwBU1ogYAxPMITPFsP1ov1ar19jxasfGcffsF6/wIwsZHb</latexit>
(b)
<latexit sha1_base64="3rc6dUe2IciS3sHw0BwXigV3pNs=">AAAB9XicbVC7TsNAEFyHVwivACXNiQgpNJGNUKCMoKEMgjykxIrOl0045fzQ3RoURfkEWqjoEC3fQ8G/YBsXEJhqNLOrnR0vUtKQbX9YhaXlldW14nppY3Nre6e8u9c2YawFtkSoQt31uEElA2yRJIXdSCP3PYUdb3KZ+p171EaGwS1NI3R9Pg7kSApOiXRTFceDcsWu2RnYX+LkpAI5moPyZ38YitjHgITixvQcOyJ3xjVJoXBe6scGIy4mfIy9hAbcR+POsqhzdhQbTiGLUDOpWCbiz40Z942Z+l4y6XO6M4teKv7n9WIanbszGUQxYSDSQyQVZoeM0DLpANlQaiTiaXJkMmCCa06EWjIuRCLGSSmlpA9n8fu/pH1Sc+q1+vVppXGRN1OEAziEKjhwBg24gia0QMAYHuEJnq0H68V6td6+RwtWvrMPv2C9fwEyQZHc</latexit>
(c)
<latexit sha1_base64="MJBkYAAZY0HwohITux054kR5PjI=">AAAB9XicbVC7TsNAEDyHVwivACXNiQgpNJGNUKCMoKEMgjykxIrWl0045fzQ3RoURfkEWqjoEC3fQ8G/YBsXEJhqNLOrnR0vUtKQbX9YhaXlldW14nppY3Nre6e8u9c2YawFtkSoQt31wKCSAbZIksJupBF8T2HHm1ymfucetZFhcEvTCF0fxoEcSQGUSDfV4fGgXLFrdgb+lzg5qbAczUH5sz8MRexjQEKBMT3HjsidgSYpFM5L/dhgBGICY+wlNAAfjTvLos75UWyAQh6h5lLxTMSfGzPwjZn6XjLpA92ZRS8V//N6MY3O3ZkMopgwEOkhkgqzQ0ZomXSAfCg1EkGaHLkMuAANRKglByESMU5KKSV9OIvf/yXtk5pTr9WvTyuNi7yZIjtgh6zKHHbGGuyKNVmLCTZmj+yJPVsP1ov1ar19jxasfGef/YL1/gUz0ZHd</latexit>
(d)
Figure 3: (a) Perimetral and (b) Internal Point Discretiza-
tion schemas for k = 3. Discretization error for (c) Perime-
tral schema and (d) Internal Point schema.
(Carrabs et al., 2017b) defined the discretization
error ε
v
, carried out by a tour T on a neighborhood
ˆ
N(v), as two times the maximum distance between
the turn point p
i
of T on C
v
and the discretization
point of
ˆ
N(v) closest to p
i
. Figure 3(c) shows the
discretization error for the PD schema. If T inter-
sects N(v) on the circular arc
˘
d
1
,d
3
then the maxi-
mum distance occurs when p
i
is in the middle of this
circular arc and it is represented by the red segment
d
3
, p
i
(or d
1
, p
i
). From trigonometry we derive that
the length of segment d
3
, p
i
is c(d
3
, p
i
) = 2r
v
sin(
π
2k
)
and ε
v
= 4r
v
sin(
π
2k
).
For the IP schema, the maximum distance occurs
when p
i
is on an extreme of the circular arc and it is
represented by the red segment d
1
, p
i
in Figure 3(d).
By trigonometry we have that c(d
1
, p
i
) = r
v
sin(
π
k
)
and ε
v
= 2r
v
sin(
π
k
). Based on trigonometric consider-
ations, this implies that the discretization error carried
out by the IP schema is lower than the one carried out
by the PD schema, in particular for small values of k.
For this reason, we adopt the IP discretization schema
in this work.
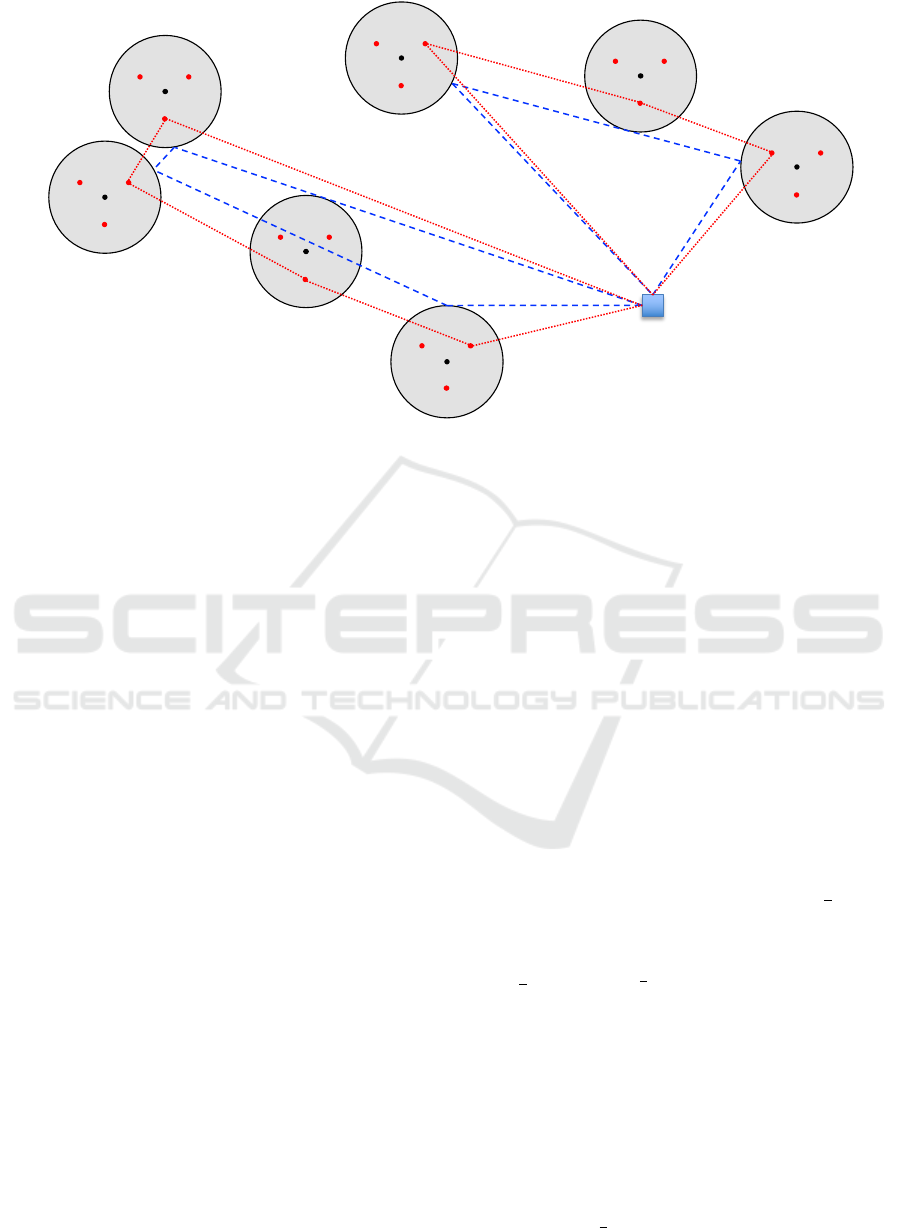
The mGTSP is defined on a complete directed
graph G = (V,A), where the node set is V = {0 ∪
b
N}
and the arc set is A = {(i, j) : i ∈ V, j ∈ V, i ̸= j,T (i) ̸=
T ( j)}. Figure 4 illustrates an instance of the mGTSP
with k = 3. The black points
{
v
1
,v
2
,...,v
7
}
represent
the target points, while the red points indicate the dis-
cretization points. In this example, three discretiza-
tion points are used to discretize each neighborhood.
The depot is denoted as 0. The two tours T
1
and T
2
,
shown as dashed blue lines, correspond to the solu-
tion {T
1
,T
2
} for the mCETSP, while the two tours
b
T
1
and
b
T
2
, depicted as red dotted lines, represent the so-
lution {
b
T
1
,
b
T
2
} for the mGTSP. Let us denote by ℓ(T )
the length of a tour T. The solution value of mCETSP
is equal to ℓ(T
2
) while the one of mGTSP is ℓ(
b
T
2
). It
is easy to see that ℓ(
b
T
2
) > ℓ(T
2
) and this occurs be-
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem
189
v
1
v
3
v
2
v
4
v
5
v
6
v
7
0
𝑝
!
𝑝
"
𝑝
#
𝑝
$
𝑝
%
<latexit sha1_base64="bNvJD3+0XyRfabhuGEoNLQMTS/Q=">AAACC3icbVC7TsNAEDyHVwivAAUFzYkEiSqyUwTKCBrKICUhUmJZ58smnHJ+6G6NiCx/Al9BCxUdouUjKPgXbOMCEqYazeze7I0bSqHRND+N0srq2vpGebOytb2zu1fdP+jrIFIcejyQgRq4TIMUPvRQoIRBqIB5roRbd3aV+bf3oLQI/C7OQ7A9NvXFRHCGqeRUj+ojhAfMH4pdGUESdx0rqTvVmtkwc9BlYhWkRgp0nOrXaBzwyAMfuWRaDy0zRDtmCgWXkFRGkYaQ8RmbwjClPvNA23Gem9DTSDMMaAiKCklzEX5vxMzTeu656aTH8E4vepn4nzeMcHJhx8IPIwSfZ0EoJORBmiuRNgN0LBQgsuxyoMKnnCmGCEpQxnkqRmlVlbQPa/H3y6TfbFitRuumWWtfFs2UyTE5IWfEIuekTa5Jh/QIJwl5Is/kxXg0Xo034/1ntGQUO4fkD4yPb+nomyM=</latexit>
T
1
<latexit sha1_base64="DHSATC82iWvrU8jeoibt7oo57Dc=">AAACC3icbVC7TsNAEDyHVwivAAUFzYkEiSqyUwTKCBrKICUhUmJZ58smnHJ+6G6NiCx/Al9BCxUdouUjKPgXbOMCEqYazeze7I0bSqHRND+N0srq2vpGebOytb2zu1fdP+jrIFIcejyQgRq4TIMUPvRQoIRBqIB5roRbd3aV+bf3oLQI/C7OQ7A9NvXFRHCGqeRUj+ojhAfMH4pdGUESd51mUneqNbNh5qDLxCpIjRToONWv0TjgkQc+csm0HlpmiHbMFAouIamMIg0h4zM2hWFKfeaBtuM8N6GnkWYY0BAUFZLmIvzeiJmn9dxz00mP4Z1e9DLxP28Y4eTCjoUfRgg+z4JQSMiDNFcibQboWChAZNnlQIVPOVMMEZSgjPNUjNKqKmkf1uLvl0m/2bBajdZNs9a+LJopk2NyQs6IRc5Jm1yTDukRThLyRJ7Ji/FovBpvxvvPaMkodg7JHxgf3+t5myQ=</latexit>
T
2
<latexit sha1_base64="7lJSpuBLDDpG1NLiJWk5tNmz2Qs=">AAACFnicbVC5TsNAFFyHO1wGSppVEiSqyE4RKCNoKIOUQKQksp43L7DK+tDuM4cs93wCX0ELFR2ipaXgX3BMCq6pRjPvHD9W0pDjvFulufmFxaXllfLq2vrGpr21fWaiRAvsikhFuueDQSVD7JIkhb1YIwS+wnN/cjz1z69QGxmFHbqNcRjARSjHUgDlkmdXagPCGyoGpRpHWTq4liO8BEo7mZc2sqzm2VWn7hTgf4k7I1U2Q9uzPwajSCQBhiQUGNN3nZiGKWiSQmFWHiQGYxATuMB+TkMI0AzT4oSM7yUGKOIxai4VL0T83pFCYMxt4OeVAdCl+e1Nxf+8fkLjw2EqwzghDMV0EUmFxSIjtMxDQj6SGolgejlyGXIBGohQSw5C5GKSp1bO83B/f/+XnDXqbrPePG1UW0ezZJbZLquwfeayA9ZiJ6zNukywO/bAHtmTdW89Wy/W61dpyZr17LAfsN4+AXUPoFc=</latexit>
b
T
2
<latexit sha1_base64="M6y7ISmt7WQdEKOsrCtnNdGwwcU=">AAACFnicbVC5TsNAFFyHK4QrQEmzIkGiiuwUgTKChjJIBJCSyHrevIQV60O7z0BkuecT+ApaqOgQLS0F/4JtUgBhqtHMO8eLlDRk2x9WaW5+YXGpvFxZWV1b36hubp2bMNYCuyJUob70wKCSAXZJksLLSCP4nsIL7/o49y9uUBsZBmc0iXDgwziQIymAMsmt7tb7hHdUDEo0DtOkfyuHeAWUnKVu4qRp3a3W7IZdgM8SZ0pqbIqOW/3sD0MR+xiQUGBMz7EjGiSgSQqFaaUfG4xAXMMYexkNwEczSIoTUr4XG6CQR6i5VLwQ8WdHAr4xE9/LKn2gK/PXy8X/vF5Mo8NBIoMoJgxEvoikwmKREVpmISEfSo1EkF+OXAZcgAYi1JKDEJkYZ6lVsjycv9/PkvNmw2k1WqfNWvtomkyZ7bBdts8cdsDa7IR1WJcJds8e2RN7th6sF+vVevsuLVnTnm32C9b7F3N9oFY=</latexit>
b
T
1
Figure 4: Comparison between the solutions of mCETSP (in blue) and mGTSP problems (in red).
cause the use of the discretization points limits the
number of routes that the algorithms can build. For
this reason, the optimal solution value we obtain by
solving mGTSP is an upper bound to the optimal so-
lution value of mCETSP.
3 A MATHEMATICAL
FORMULATION FOR mGTSP
In this section, we present a mixed integer linear
programming formulation for the mGTSP obtained
by adapting the formulation proposed by (Bianchessi
et al., 2018) for the Team Orienteering Problem. The
formulation involves four types of variables: x
i j
, y
i
,
w
i j
, and z. The meaning of these variables is defined
in the following.
x
i j
=
®
1 if the arc (i, j) is selected,
0 otherwise.
The x variables are used to describe the routes as-
signed to the drones.
y
i
=
®
1 if node i is visited,
0 otherwise.
The y variables state what are the nodes visited by
drones. These variables are necessary to assure that
each target point is covered by the routes.
w
i j
≥ 0
The w variables are continuous variables that state
the arrival time to the node j of a drone coming from
node i. This variable is used to calculate the length
of individual tours. Finally, variable z represents the
length of the maximum route inside the solution, and
the goal of the model is to minimize the value of this
variable.
Following the formulation proposed
by (Bianchessi et al., 2018), we introduce a sec-
ond (dummy) depot that we denote by
¯
0. Both
depots, 0 and
¯
0, are located in the same position
of the plane. Therefore, from now on, the graph
G = (V,A) has the node set V = {0 ∪
¯
0 ∪
b
N} and the
arc set is A = {(i, j ) : i ∈ V, j ∈ V,i ̸= j, T (i) ̸= T ( j)}
with T (
¯
0) =
¯
0.
In order to present our mathematical formulation
for mGTSP, we need the following notation.
• T
max
: Maximum length of a route;
• m: Number of routes;
• t
i j
: Travel time from node i to j, where t
0
0
= 0 and
t
ii
= 0;
• t
0
i j
= t
0i
+t
i j
;
• T
max
j0
= T
max
−t
j0
;
• δ
+
(S) = {(i, j) ∈ A : i ∈ S, j /∈ S}: Set of arcs leav-
ing the set S, with S ⊆
b
N ∪ {0,
¯
0};
• δ
−
(S) = {(i, j) ∈ A : i /∈ S , j ∈ S}: Set of arcs en-
tering the set S, with S ⊆
b
N ∪ {0,
¯
0}.
The mathematical formulation of the mGTSP is the
following:
(MIP) min z (1)
∑
j∈
b
N
x
0 j
=
∑
i∈
b
N
x
i0
= m (2)
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
190

∑
( j,i)∈δ
−
(i)
x
ji
=
∑
(i, j)∈δ
+
(i)
x
i j
= y
i
i ∈
b
N (3)
∑
i∈
b
N(v)
y
i
= 1 v ∈ N (4)
w
0 j
= t
0 j
x
0 j
j ∈
b
N (5)
∑
(i, j)∈δ
+
(i)
w
i j
−
∑
( j,i)∈δ
−
(i)
w
ji
=
∑
(i, j)∈δ
+
(i)
t
i j
x
i j
i ∈
b
N
(6)
w
i j
≤ T
max
j0
x
i j
(i, j ) ∈ A \ {(0, 0)} (7)
w
i j
≥ t
0
i j
x
i j
(i, j ) ∈ A \ {(0, 0)} (8)
z ≥ w
i0
i ∈
b
N (9)
y
i
∈ {0,1} i ∈
b
N (10)
w
i j
≥ 0 i, j ∈
b
N (11)
x
i j
∈ {0,1} (i, j) ∈ A \ {(0, 0)} (12)
• The objective function (1) aims to minimize the
variable z that represents the length of the maxi-
mum route inside the solution;
• Constraint (2) impose that exactly m routes have
to start from the depot 0 and end into the depot
¯
0.
This assure that all the required routes are defined
and that each route starts and ends into the depot;
• Constraint (3) assure that a discretization node i
is entered and leaved exactly once if it is visited
(i.e., if y
i
= 1);
• Constraint (4) ensures that exactly one discretiza-
tion point in the neighborhood
b
N(v) of each target
point v is visited. Since in our problem, we use the
Euclidean distances, the triangle inequality holds.
This means that always exists an optimal solution
to the problem that visits one point for each neigh-
borhood.
• Constraint (5) assigns to variable w
0 j
the arrival
time of a route into node j coming directly from
depot 0.
• Constraint (6) ensures that the w
i j
variables are
correctly updated according to the arcs selected
(i.e. x
i j
= 1).
• Constraint (7) sets an upper limit on the duration
of each route.
• Constraint (8) sets a lower bound on the values
of w
i j
, ensuring w
i j
represents the arrival time at
node j if x
i j
= 1, otherwise w
i j
= 0.
• Constraint (9) ensures that the variable z equals
the length of the maximum route.
• Finally, (10)-(12) are variables definition con-
straints.
To enhance the strength of the model, an addi-
tional constraint can be introduced to limit the overall
duration of all routes combined:
∑
(i, j)∈A\(0,0)
t
i j
x
i j
≤ mT
max
(13)
In our model, the T
max
parameter plays a funda-
mental role in determining the feasibility of solutions,
as it represents an upper limit on the maximum route
duration for each drone. In order to compute an upper
limit of the optimal solution value, we take a feasi-
ble solution T of the CETSP and add to its value c(T )
the discretization error ε
v
= 2r
v
sin
π
k
carried out for
each neighborhood
ˆ
N(v) inside a route. Formally:
T
max
=
¢
c(T ) +
∑
v∈N
ε
v
•
(14)
It is worth noting that the ε
v
value depends on
the r
v
value and, in general, the neighborhoods could
have different radii. Since T
max
is used as a bigM
value inside the model, we would to minimize its
value to improve the performance of the model. To
this end, we observe that each of the m routes must
contain at least one discretization point. This means
that, the maximum number of discretization points
inside a route for mGTSP, is equal to |N| − (m − 1).
Therefore, the total discretization error, carried out in
any route, can be computed by adding the |N| − (m −
1) largest ε
v
values. By denoting with N
m
the set of
|N|−(m − 1) largest ε
v
values, we update the formula
to compute T
max
as follow:
T
max
=
¢
c(T ) +
∑
v∈N
m
ε
v
•
(15)
3.1 Graph Reduction Algorithm (GRA)
In order to speed up the computation of the upper
bound, the graph reduction algorithm (GRA) pro-
posed in (Carrabs et al., 2017b), is applied on G =
(V,A) to remove nodes and arcs that will not con-
tribute to the optimal solution. Furthermore, we pro-
vide a proof of correctenss of GRA in the context of
mGTSP, as GRA was originally proposed for a dis-
cretized version of CETSP while in our case we have
m routes and a different objective function.
GRA works as follows. Let v be a target point
and let i ∈ V and j ∈ V be two points such that
T (i) ̸= T ( j) ̸= v (see Figure 5). According to the
Euclidean distance, the algorithm computes the short-
est path from i to j passing through r, for each point
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem
191
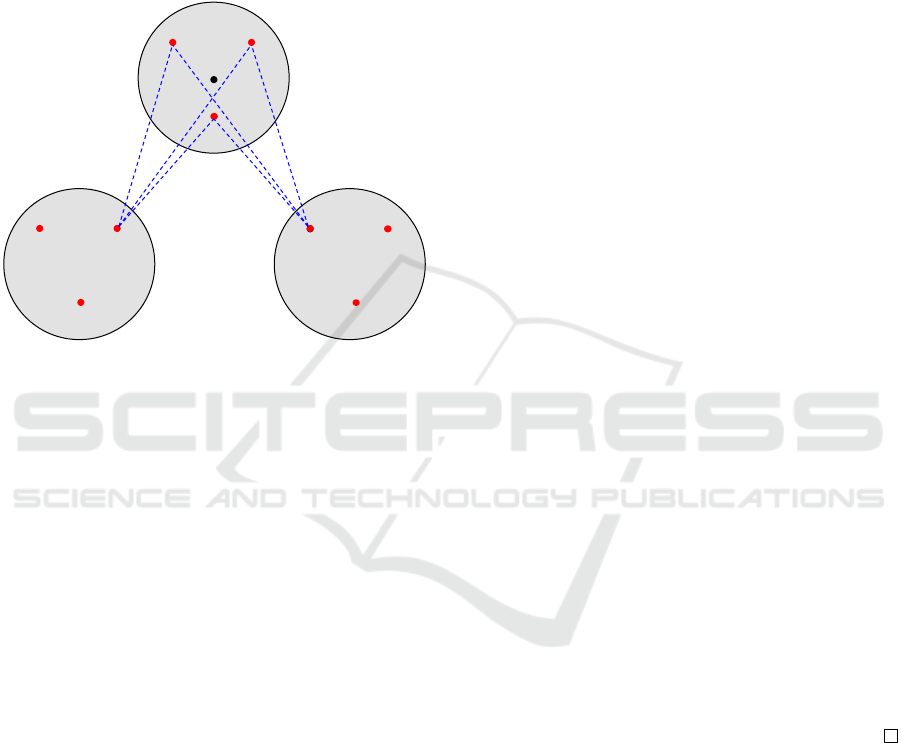
r ∈
b
N(v). Notice that these shortest paths are always
composed of two edges (i,r) and (r, j). Among all
the shortest paths computed, the algorithm saves the
shortest one, which we denote from now on as S
(i,v, j)
,
and it marks as necessary its two edges and the point
of
b
N(v) belong to it. This computation is repeated
for each target point v ∈ N and for each pair of points
i ∈ V and j ∈ V with T (i) ̸= T ( j ) ̸= v.
<latexit sha1_base64="vooPYmnqnlyVjVWccOWJVT5nwWw=">AAAB9XicbVC7TsNAEDyHVwivACXNiQSJKrJTBMoIGsogyENKrOh82YRTzmfrbh0UWfkEWqjoEC3fQ8G/YBsXkDDVaGZXOzteKIVB2/60CmvrG5tbxe3Szu7e/kH58KhjgkhzaPNABrrnMQNSKGijQAm9UAPzPQldb3qd+t0ZaCMCdY/zEFyfTZQYC84wke6qs+qwXLFrdga6SpycVEiO1rD8NRgFPPJBIZfMmL5jh+jGTKPgEhalQWQgZHzKJtBPqGI+GDfOoi7oWWQYBjQETYWkmQi/N2LmGzP3vWTSZ/hglr1U/M/rRzi+dGOhwghB8fQQCgnZIcO1SDoAOhIaEFmaHKhQlDPNEEELyjhPxCgppZT04Sx/v0o69ZrTqDVu65XmVd5MkZyQU3JOHHJBmuSGtEibcDIhT+SZvFiP1qv1Zr3/jBasfOeY/IH18Q1BQpHk</latexit>
v
<latexit sha1_base64="dOvC3Et+WZHqNOlAoPO+JEP1dZg=">AAAB9XicbVC7TsNAEDzzDOEVoKQ5kSBRRXaKQBlBQxkEeUiJFa0vm3DK+aG7NSiK8gm0UNEhWr6Hgn/BNi4gYarRzK52drxISUO2/WmtrK6tb2wWtorbO7t7+6WDw7YJYy2wJUIV6q4HBpUMsEWSFHYjjeB7Cjve5Cr1Ow+ojQyDO5pG6PowDuRICqBEuq3oyqBUtqt2Br5MnJyUWY7moPTVH4Yi9jEgocCYnmNH5M5AkxQK58V+bDACMYEx9hIagI/GnWVR5/w0NkAhj1BzqXgm4u+NGfjGTH0vmfSB7s2il4r/eb2YRhfuTAZRTBiI9BBJhdkhI7RMOkA+lBqJIE2OXAZcgAYi1JKDEIkYJ6UUkz6cxe+XSbtWderV+k2t3LjMmymwY3bCzpjDzlmDXbMmazHBxuyJPbMX69F6td6s95/RFSvfOWJ/YH18AzsCkeA=</latexit>
r
<latexit sha1_base64="pQn+2SMFLdhIEQgukFWgvrDgS78=">AAAB9XicbVC7TsNAEDzzDOEVoKQ5kSBRRXaKQBlBQxkEeUiJFa0vm3DK+aG7NSiK8gm0UNEhWr6Hgn/BNi4gYarRzK52drxISUO2/WmtrK6tb2wWtorbO7t7+6WDw7YJYy2wJUIV6q4HBpUMsEWSFHYjjeB7Cjve5Cr1Ow+ojQyDO5pG6PowDuRICqBEuq3IyqBUtqt2Br5MnJyUWY7moPTVH4Yi9jEgocCYnmNH5M5AkxQK58V+bDACMYEx9hIagI/GnWVR5/w0NkAhj1BzqXgm4u+NGfjGTH0vmfSB7s2il4r/eb2YRhfuTAZRTBiI9BBJhdkhI7RMOkA+lBqJIE2OXAZcgAYi1JKDEIkYJ6UUkz6cxe+XSbtWderV+k2t3LjMmymwY3bCzpjDzlmDXbMmazHBxuyJPbMX69F6td6s95/RFSvfOWJ/YH18Ayzykdc=</latexit>
i
<latexit sha1_base64="qJpX/pVz/5viYKzZDsp1IU8goLs=">AAAB9XicbVC7TsNAEDyHVwivACXNiQSJKrJTBMoIGsogyENKrOh82YQj57N1twZFVj6BFio6RMv3UPAv2MYFJEw1mtnVzo4XSmHQtj+twsrq2vpGcbO0tb2zu1feP+iYINIc2jyQge55zIAUCtooUEIv1MB8T0LXm16mfvcBtBGBusVZCK7PJkqMBWeYSDfV++qwXLFrdga6TJycVEiO1rD8NRgFPPJBIZfMmL5jh+jGTKPgEualQWQgZHzKJtBPqGI+GDfOos7pSWQYBjQETYWkmQi/N2LmGzPzvWTSZ3hnFr1U/M/rRzg+d2OhwghB8fQQCgnZIcO1SDoAOhIaEFmaHKhQlDPNEEELyjhPxCgppZT04Sx+v0w69ZrTqDWu65XmRd5MkRyRY3JKHHJGmuSKtEibcDIhT+SZvFiP1qv1Zr3/jBasfOeQ/IH18Q0ugpHY</latexit>
j
<latexit sha1_base64="8hnerFaxKwdSmNXqiWVuWoarfZo=">AAAB93icbVC7TsNAEDyHVwivACXNiQRBFdkpAmUEDWWQcBIpsaLzZRNOOZ+tuzVSZOUbaKGiQ7R8DgX/gm1cQMJUo5ld7ez4kRQGbfvTKq2tb2xulbcrO7t7+wfVw6OuCWPNweWhDHXfZwakUOCiQAn9SAMLfAk9f3aT+b1H0EaE6h7nEXgBmyoxEZxhKrl1fV6vjKo1u2HnoKvEKUiNFOiMql/DccjjABRyyYwZOHaEXsI0Ci5hURnGBiLGZ2wKg5QqFoDxkjzsgp7FhmFII9BUSJqL8HsjYYEx88BPJwOGD2bZy8T/vEGMkysvESqKERTPDqGQkB8yXIu0BaBjoQGRZcmBCkU50wwRtKCM81SM01qyPpzl71dJt9lwWo3WXbPWvi6aKZMTckouiEMuSZvckg5xCSeCPJFn8mLNrVfrzXr/GS1Zxc4x+QPr4xvS55Il</latexit>
r
0
<latexit sha1_base64="za5Tqt2X8dBxoH2JAOy2mNQ6BRM=">AAAB+HicbVC7TsNAEDzzDOEVoKQ5kaBQRXaKQBlBQxkk8pASKzpfNuHI+WzdrZGClX+ghYoO0fI3FPwLtnEBCVONZna1s+OFUhi07U9rZXVtfWOzsFXc3tnd2y8dHHZMEGkObR7IQPc8ZkAKBW0UKKEXamC+J6HrTa9Sv/sA2ohA3eIsBNdnEyXGgjNMpE5FV6uV4rBUtmt2BrpMnJyUSY7WsPQ1GAU88kEhl8yYvmOH6MZMo+AS5sVBZCBkfMom0E+oYj4YN87SzulpZBgGNARNhaSZCL83YuYbM/O9ZNJneGcWvVT8z+tHOL5wY6HCCEHx9BAKCdkhw7VIagA6EhoQWZocqFCUM80QQQvKOE/EKOkl7cNZ/H6ZdOo1p1Fr3NTLzcu8mQI5JifkjDjknDTJNWmRNuHknjyRZ/JiPVqv1pv1/jO6YuU7R+QPrI9vNcGSVg==</latexit>
r
00
Figure 5: Example of shortest paths computed using Graph
Reduction Algorithm.
At the end of the computation, GRA removes all
the edges and nodes not marked, that is, the ones
that do not belong to any shortest path S
(i,v, j)
. No-
tice that the depots are marked by default because
they are necessary for the construction of the routes.
In the following, with a little abuse of notation, we
use the ℓ function to denote the length of paths too.
Let us consider the example depicted in Figura 5.
GRA computes the three shortest paths < i,r, j >,
< i,r
′
, j > and < i,r
′′
, j >. Since, among these three
paths, the shortest one is < i,r, j >, the algorithm
marks the arcs (i,r), (r, j) and the node r. Moreover,
S
(i,v, j)
=< i,r, j >. Theorem 1 proves that by apply-
ing GRA to the graph, the optimal solution of mGTSP
does not change.
Theorem 1. Let S = ∪
i∈V, j∈V,v∈N,T (i)̸=T ( j)̸=v
S
(i,v, j)
be
the set of shortest paths saved by GRA algorithm.
Given a target point v ∈ N, any edge (x,y) ∈ A, in-
cident to
b
N(v) and not belonging to any shortest path
in S, either does not belong to the optimal solution
{
b
T
∗
1
,
b
T
∗
2
,...,
b
T
∗
m
} or there is an alternative optimal so-
lution without this arc.
Proof. Let us suppose that the arc (x,y) belongs to a
tour
b
T
∗
h
of the optimal solution, with x ∈
b
N(v), and let
q be the point that coming just before x in
b
T
∗
h
. There
are the following two cases to consider:
1.
b
T
∗
h
is the longest tour of the optimal solution and
the other tours are shorter than it.
In this case we have that ℓ(
b
T
∗
h
) > ℓ(
b
T
∗
p
), with p =
{1,...,m} \ {h}, and the optimal solution value is
equal to ℓ(
b
T
∗
h
). We have to consider the following
subcases:
• ℓ(< q, x, y >) > ℓ(S
(q,v,y)
).
Since the arc (x,y) do not belong to S
(q,v,y)
than there exists another discretization point
r ∈
b
N(v) such that the path < q,r,y > is shorter
than < q,x, y >. This means that, by replac-
ing < q,x,y > with < q,r,y > in
b
T
∗
h
, we obtain
a new shortest tour
b
T
∗
h
′
and then a new solution
{
b
T
∗
1
,
b
T
∗
2
,...,
b
T
∗
h
′
,...,
b
T
∗
m
} better than the optimal
one. A contradiction.
• ℓ(< q, x, y >) = ℓ(S
(q,v,y)
).
This situation occurs when S
(q,v,y)
can be build
by using more different discretization points
of
b
N(v). Let us suppose that r ∈
b
N(v) is an-
other discretization point of
b
N(v) such that ℓ(<
q,x,y >) = ℓ(< q,r, y >). This means that, by
replacing < q,x,y > with < q,r,y > in
b
T
∗
h
, we
obtain another tour
b
T
∗
h
′
with ℓ(
b
T
∗
h
) = ℓ(
b
T
∗
h
′
) and
then {
b
T
∗
1
,
b
T
∗
2
,...,
b
T
∗
h
′
,...,
b
T
∗
m
} is an alternative
optimal solution that does not contain the arc
(x,y).
2.
b
T
∗
p
is the longest tour of the optimal solution with
p ̸= h.
In this case we have that ℓ(
b
T
∗
h
) ≤ ℓ(
b
T
∗
p
). More-
over, since (x,y) does not belonging to any short-
est path in S then ℓ(< q,x,y >) ≥ ℓ(S
(q,v,y)
). As
a consequence, by replacing < q, x, y > with <
q,r, y > in
b
T
∗
h
, we obtain a new tour
b
T
∗
h
′
with
ℓ(
b
T
∗
h
′
) ≤ ℓ(
b
T
∗
h
). This means that the solution
{
b
T
∗
1
,
b
T
∗
2
,...,
b
T
∗
h
′
,...,
b
T
∗
m
} have the same cost of the
optimal one and then it is an alternative optimal
solution that does not contain the arc (x,y).
4 COMPUTATIONAL TESTS
In this section, we describe the results of our MIP
model for mGTSP obtained during our computational
test phase. The model was coded in C++ and solved
using the IBM ILOG CPLEX 22.1.1 solver. A time
limit of one hour, a thread limit of 4, a memory limit
of 16 GB were imposed. Moreover, the relative and
absolute MIP gap tolerance are set to 1e-7. All re-
maining CPLEX parameters were left to their default
value. All tests were performed on an OSX platform
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
192

(iMac 2020), running on an Intel Core i9-10910 pro-
cessor clocked at 3.6 GHz with 64 GB of RAM.
The computational tests are carried out on 360 in-
stances having 6, 8, 10 and 12 target points and three
radius values: 0.25, 0.50, and 1.00. There are 30 in-
stances for each combination of the number of tar-
get points and the radius values. This is a subset of
the instances proposed by (Behdani and Smith, 2014)
for the CETSP problem. For this set of instances, the
optimal values of the CETSP solutions are available.
So, since it is the smallest possible value as c(T ), we
use it to calculate T
max
as described in Section 2.
It is worth noting that in CETSP all the neighbor-
hoods must be covered by a single route whereas in
mGTSP the same task is carried out using m routes.
Therefore, it could be natural to think that the opti-
mal solution value of CETSP is an upper bound of the
optimal solution value of mGTSP but it’s not always
like this. Indeed, the use of the discretization points,
in mGTSP, generates a discretization error, for each
neighborhood, that must be added to the cost of the
routes and then the optimal solution value of CETSP
may be lower than the one of mGTSP.
Due to the complexity of mGTSP and to limit
the size of the instances, we use three discretization
points (that is k = 3) for each neighborhood. This
means that for a problem with 10 target nodes, the
model will solve an instance with 3 × 10 + 2 = 32
nodes. We start our computational study by evalu-
ating the effectiveness of the GRA algorithm. In Fig-
ure 6 the percentages of nodes and arcs removed by
the GRA algorithm are shown. The four scenarios,
with 6, 8, 10 and 12 target points and radii 0.25, 0.5
and 1, are reported on the x-axis, each one composed
of thirty instances. These results highlight the effec-
tiveness of GRA which removes always more than
14% of nodes and 32% of edges. In more detail, the
percentage of nodes removed ranges from 14.6%, in
the scenario with 12 target points and a radius equal
to 1, up to 27%, in the scenario with 6 target points
and a radius equal to 0.25. A similar trend is ob-
served for the arcs too but with higher percentage val-
ues. Indeed, the percentage of arcs removed ranges
from 32.4%, in the scenario with 12 target points and
a radius equal to 1, to 53.3%, in the scenario with
6 target points and a radius equal to 0.25. Figure 6
shows a clear trend in which GRA is more effective
in the instances with the smaller radius and smallest
number of targets in both the removal of nodes and
arcs. Since the new graph produced by GRA contains
a much smaller number of nodes and edges, the MIP
model requires less computational time to find the op-
timal solution.
In Table 1 we evaluate the performance of the MIP
model. Each row of the table contains values com-
puted on a test scenario composed of 30 instances.
The first four columns of the table report the char-
acteristics of the instances that is: the length of the
radius (Radius), the number of target points (Target),
the number of nodes (Nodes) and arcs (Arcs). The
next five columns report, for m = 2, the average ob-
jective value (Obj), the average computational time
(Time), in seconds, the number of optimal (#Opt) and
feasible (#Feas) solutions found by model and the av-
erage of the optimality gap (Gap%). The last five
columns report the same information but with m = 3.
Table 1 shows that, for m = 2, MIP finds the opti-
mal solution on 291 out of 360 instances within the
time limit of 1 hour. In particular, all the small in-
stances with 20 and 26 nodes are solved optimally in
less than 40 seconds whatever is the radius value. On
the larger instances, with 32 and 38 nodes, MIP finds
the optimal solution on 111 out of 180 instances. The
optimality gap percentage is at most 2.19% for the
instances with 32 nodes and lower than 9% for the in-
stances with 38 nodes. These optimality gaps show
that, in the largest instances with 38 nodes, the in-
cumbent solution found by the model, is not too far
from the optimal one when two drones are used. Fi-
nally, the average computational time is lower than
2450 seconds. The performance of the model wors-
ens when we increase the number of drones used to
3. Indeed, MIP finds the optimal solution on 230 out
of 360 instances for m = 3. In particular, all the small
instances with 20 and 26 nodes are solved to optimal-
ity but the computational time grows up to 73 sec-
onds. On the larger instances, with 32 and 38 nodes,
MIP finds the optimal solution on 50 out of 180 in-
stances and the optimality gap percentage reaches ap-
proximately 8% for the instances with 32 nodes, and
21% for the instances with 38 nodes. Finally, the av-
erage computational time grows up to 3290 seconds.
These results highlight that the number of routes used
impacts both the quality of the final solution found
by the model and the computational time required to
obtain it.
5 CONCLUSION
In this article, we studied the Multiple Close-Enough
Traveling Salesman Problem (mCETSP), a variant
of the Close-Enough Traveling Salesman Problem
(CETSP), where multiple vehicles are used to visit a
given number of target points. Due to the complexity
of the problem we adopted a discretization schema
that reduced mCETSP to the Multiple Generalized
Traveling Salesman Problem (mGTSP). For this dis-
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem
193
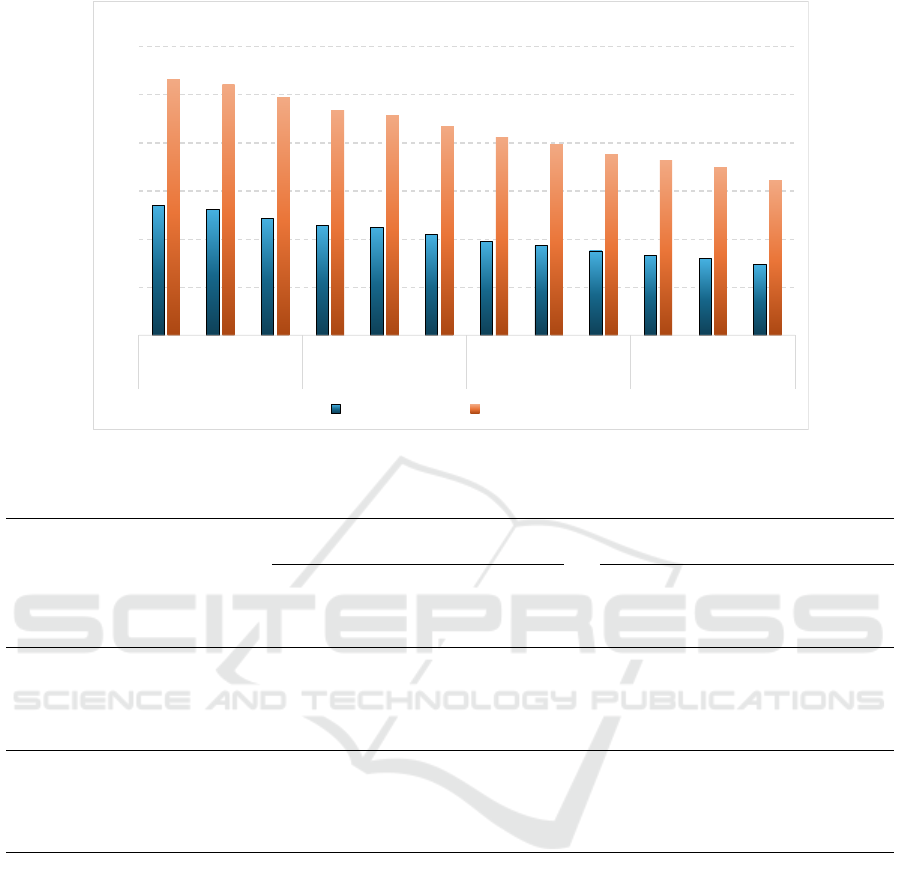
0%
10%
20%
30%
40%
50%
60%
0.25 0.50 1.00 0.25 0.50 1.00 0.25 0.50 1.00 0.25 0.50 1.00
6 8 10 12
Reduction Percentage
Node Reduction Arc Reduction
Figure 6: Percentage of nodes and arcs removed by GRA algorithm.
Table 1: Test Results of the MIP model.
2 vehicles 3 vehicles
Radius Target Nodes Arcs Obj Time #Opt #Feas Gap% Obj Time #Opt #Feas Gap%
0.25
6 20 306 22.85 0.30 30 0 0.00% 21.37 0.40 30 0 0.00%
8 26 552 25.52 18.94 30 0 0.00% 23.53 40.60 30 0 0.00%
10 32 870 26.80 859.84 26 4 1.04% 24.57 2162.57 15 15 6.79%
12 38 1260 28.70 2353.16 13 17 6.92% 26.20 3182.36 3 27 19.23%
0.50
6 20 306 22.53 0.40 30 0 0.00% 21.14 0.45 30 0 0.00%
8 26 552 25.17 24.80 30 0 0.00% 23.30 46.33 30 0 0.00%
10 32 870 26.38 978.08 24 6 1.54% 24.28 2264.88 14 16 7.65%
12 38 1260 28.24 2442.80 13 17 7.47% 25.90 3089.85 3 27 19.95%
1.00
6 20 306 21.93 0.65 30 0 0.00% 20.69 0.56 30 0 0.00%
8 26 552 24.53 39.83 30 0 0.00% 22.84 72.76 30 0 0.00%
10 32 870 25.60 1123.15 23 7 2.19% 23.76 2438.22 13 17 8.27%
12 38 1260 27.41 2441.69 12 18 8.88% 25.32 3288.45 2 28 21.68%
cretized version, we proposed a mixed integer lin-
ear Programming formulation which provides an up-
per bound for the optimal solution value of mCETSP,
given the discretization error introduced. Addition-
ally, we applied a graph reduction algorithm (GRA)
to reduce the problem size, and we provided a proof
of its correctness as the algorithm was originally pro-
posed for a discretized version of CETSP. The compu-
tation tests performed on benchmark instances of the
CETSP highlights i) the effectiveness of GRA in sig-
nificantly reducing the number of nodes and arcs, and
ii) the impact of the number of routes on the perfor-
mance on the mathematical model. A potential direc-
tion for future research is to improve the mathematical
model and develop effective metaheuristics.
ACKNOWLEDGEMENTS
We acknowledge financial support under the National
Recovery and Resilience Plan (NRRP), Mission 4,
Component 2, Investment 1.1, Call for tender No.
1409 published on 14.9.2022 by the Italian Ministry
of University and Research (MUR), funded by the
European Union – NextGenerationEU– Project Title
“Smart Agriculture by Collaborative Robots Swarm”
– CUP P2022E38SJ - Grant Assignment Decree No.
1379 adopted on 01.09.2023 by the Italian Ministry
of Ministry of University and Research (MUR).
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
194

REFERENCES
Behdani, B. and Smith, J. C. (2014). An integer-
programming-based approach to the close-enough
traveling salesman problem. INFORMS Journal on
Computing, 26(3):415 – 432.
Bianchessi, N., Mansini, R., and Speranza, M. G. (2018).
A branch-and-cut algorithm for the team orienteering
problem. International Transactions in Operational
Research, 25(2):627–635.
Cariou, C., Moiroux-Arvis, L., Bendali, F., and Mailfert,
J. (2024). Optimal route planning of an unmanned
aerial vehicle for data collection of agricultural sen-
sors. In IEEE INFOCOM 2024-IEEE Conference on
Computer Communications Workshops (INFOCOM
WKSHPS), pages 1–6. IEEE.
Carrabs, F., Cerrone, C., Cerulli, R., and D’Ambrosio, C.
(2017a). Improved upper and lower bounds for the
close enough traveling salesman problem. In Au, M.
H. A., Castiglione, A., Choo, K.-K. R., Palmieri, F.,
and Li, K.-C., editors, Green, Pervasive, and Cloud
Computing, pages 165–177, Cham. Springer Interna-
tional Publishing.
Carrabs, F., Cerrone, C., Cerulli, R., and Gaudioso, M.
(2017b). A novel discretization scheme for the close
enough traveling salesman problem. Computers and
Operations Research, 78:163 – 171.
Carrabs, F., Cerrone, C., Cerulli, R., and Golden, B. (2020).
An adaptive heuristic approach to compute upper and
lower bounds for the close-enough traveling sales-
man problem. INFORMS Journal on Computing,
32(4):1030–1048.
Coutinho, W. P., Nascimento, R. Q. d., Pessoa, A. A., and
Subramanian, A. (2016). A branch-and-bound algo-
rithm for the close-enough traveling salesman prob-
lem. INFORMS Journal on Computing, 28(4):752–
765.
Dolias, G., Benos, L., and Bochtis, D. (2022). On the rout-
ing of unmanned aerial vehicles (uavs) in precision
farming sampling missions. In Information and Com-
munication Technologies for Agriculture—Theme III:
Decision, pages 95–124. Springer.
Dong, J., Yang, N., and Chen, M. (2007). Heuristic ap-
proaches for a tsp variant: The automatic meter read-
ing shortest tour problem. Extending the horizons:
Advances in computing, optimization, and decision
technologies, pages 145–163.
Gulczynski, D. J., Heath, J. W., and Price, C. C. (2006).
The close enough traveling salesman problem: A dis-
cussion of several heuristics. Perspectives in Opera-
tions Research: Papers in Honor of Saul Gass’ 80 th
Birthday, pages 271–283.
Lei, Z. and Hao, J.-K. (2024). An effective memetic algo-
rithm for the close-enough traveling salesman prob-
lem. Applied Soft Computing, 153:111266.
Mennell, W., Golden, B., and Wasil, E. (2011). A steiner-
zone heuristic for solving the close-enough traveling
salesman problem. In 2th INFORMS computing soci-
ety conference: operations research, computing, and
homeland defense.
Mennell, W. K. (2009). Heuristics for solving three routing
problems: Close-enough traveling salesman problem,
close-enough vehicle routing problem, and sequence-
dependent team orienteering problem. University of
Maryland, College Park.
Wang, X., Golden, B., and Wasil, E. (2019). A Steiner zone
variable neighborhood search heuristic for the close-
enough traveling salesman problem. Computers &
Operations Research, 101(1):200–219.
Yang, Z., Xiao, M.-Q., Ge, Y.-W., Feng, D.-L., Zhang, L.,
Song, H.-F., and Tang, X.-L. (2018). A double-loop
hybrid algorithm for the traveling salesman problem
with arbitrary neighbourhoods. European Journal of
Operational Research, 265(1):65–80.
Yuan, B., Orlowska, M., and Sadiq, S. (2007). On the
optimal robot routing problem in wireless sensor net-
works. IEEE transactions on knowledge and data en-
gineering, 19(9):1252–1261.
Upper Bound Computation for the Multiple Close-Enough Traveling Salesman Problem
195
