Layerwise Image Vectorization via Bayesain-Optimized Contour
Ghfran Jabour
a
, Sergey Muravyov
b
and Valeria Efimova
c
ITMO University, Kronverksky Pr. 49, bldg. A, St. Petersburg, 197101, Russia
fi
Keywords:
Image Vectorization, Contour-Based Initialization, Bayesian Optimization, Scalable Vector Graphics,
Computational Efficiency, Reconstruction Fidelity, Path Optimization, Digital Content Creation, Semantic
Simplification, Superpixel-Based Vectorization.
Abstract:
This work presents a novel method LIVBOC for complex image vectorization that addresses key challenges in
path initialization, color assignment, and optimization. Unlike existing approaches such as LIVE, our method
generates Bayesian-optimized contour for path initialization, which is then optimized using a customized loss
function to align it better with the target shape in the image. In our method, adaptive selection of points and
parameters for efficient and accurate vectorization is enabled to reduce unnecessary iterations and computa-
tional overhead. LIVBOC achieves superior reconstruction fidelity with fewer paths, and that is due to the
path initialization technique, which initializes paths as contours that approximate target shapes in the image,
reducing redundancy in points and paths. The experimental evaluation indicates that LIVBOC outperforms
LIVE in all key metrics, including a significant reduction in L
2
loss, processing time, and file size. LIVBOC
achieves comparable results with just 100 iterations, compared to LIVE’s 500 iterations, while preserving finer
details and generating smoother, more coherent paths. These improvements make LIVBOC more suitable for
applications that require scalable, compact vector graphics, and computational efficiency. By achieving both
accuracy and efficiency, LIVBOC offers a new robust alternative for image vectorization tasks. The LIVBOC
code is available at https://github.com/CTLab-ITMO/LIVBOC.
1 INTRODUCTION
Image vectorization, the process of converting raster
images into scalable vector graphics (SVG), has be-
come an essential tool in various fields, including
graphic design, web development, and scientific vi-
sualization. Vector graphics offer distinct advantages
over raster images, such as infinite scalability, smaller
file sizes, and efficient editing capabilities. Despite
the importance of vector graphics, this process comes
with multiple challenges. Obtaining high-quality vec-
torization, especially for complex images with impor-
tant details, is not an easy task (Dziuba et al., 2023),
as we will need to trade off many metrics listed above.
Image vectorization methods must balance the fidelity
of reconstruction, computational efficiency, and com-
pactness while preserving the key features of the input
image.
Many traditional vectorization methods often use
fixed strategies for path initialization and parame-
a
https://orcid.org/0009-0003-8092-9804
b
https://orcid.org/0000-0002-4251-1744
c
https://orcid.org/0000-0002-5309-2207
Input Paths Initialized Paths Optimized
Figure 1: Example showing the output of each stage of
the LIVBOC method (path initialization and path optimiza-
tion).
ter settings, which limit their ability to adapt to di-
verse image contents. As an example, SAMVG (Zhu
et al., 2023) utilizes segmentation models for vector-
ization, but highly depends on the quality of segmen-
tation maps, which may struggle with overlapping
objects. Another example is SuperSVG (Hu et al.,
2024), which simplifies vectorization using superpix-
els but may sacrifice fine details in highly textured ar-
eas. Recent advances, such as LIVSS (Wang et al.,
Jabour, G., Muravyov, S. and Efimova, V.
Layerwise Image Vectorization via Bayesain-Optimized Contour.
DOI: 10.5220/0013381000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
831-838
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
831

2024), incorporate semantic segmentation to priori-
tize meaningful regions but are computationally in-
tensive due to their iterative processing.
To achieve a high-quality low-sized SVGs, we
propose LIVBOC (Layer-wise Image Vectorization
with Bayesian-Optimized Contours), an image vec-
torization method of two main stages, a Bayesian-
optimized contour-based path initialization stage and
a path optimization stage. Contour-based techniques
have been shown to be effective in capturing shape
boundaries while minimizing redundancy (Arbel
´
aez
et al., 2011; Polewski et al., 2024). Furthermore,
Bayesian optimization (Frazier, 2018; Snoek et al.,
2012) have found widespread use in machine learning
for hyperparameter optimization. Building on those
two well-established techniques, the first stage of our
method utilizes the Bayesian optimization algorithm
to determine the optimal values for the parameters
used in identifying the optimal contour used in path
initialization. This stage gives the method the ability
to adapt to the complexity and variations of colors in
the input image. In the second stage, after path initial-
ization, we optimize the initialized path with a cus-
tom loss function composed of three loss functions:
the reconstruction loss to preserve information and
guarantee a correct direction of the path during the
optimization process, the Laplacian smoothness loss
based on (Sorkine et al., 2004) to ensure smoothness
of paths, and the overlap loss to prevent shapes from
overlapping with other correct shapes. With these two
stages, LIVBOC ensures not only achieving superior
reconstruction fidelity but also reducing the number
of required paths and computational time. Unlike pre-
vious methods, which often require a fixed number of
iterations for convergence, LIVBOC achieves high-
quality results with few iterations by integrating ro-
bust initialization with efficient optimization. Thus,
our method fits for applications demanding scalable
and high-fidelity vector graphics, such as web graph-
ics, logo design, and digital content creation.
In our experiments, we compare our LIVBOC
method with LIVE (Ma et al., 2022) and demonstrate
LIVBOC strength. Through a multi-faceted compari-
son, we highlight the efficiency of our method in gen-
erating high-quality vector image with optimal primi-
tives (optimal SVG file size).
Key contributions of our paper are as follows:
• We propose LIVBOC, a novel image vectoriza-
tion method that generates minimized SVG files
by using an adaptive number of points for differ-
ent paths.
• The resulting vector primitives are optimal or
near-optimal, allowing the user to better manip-
ulate the vectors.
• The proposed LIVBOC method is 3-5 times faster
than current state-of-the-art machine learning-
based vectorization.
2 RELATED WORK
2.1 Layered Image Vectorization via
Semantic Simplification (LIVSS)
The LIVSS method (Wang et al., 2024) is a novel ap-
proach to image vectorization that uses semantic in-
formation to guide the vectorization process. In this
method, Score Distillation Sampling (SDS) and se-
mantic segmentation are calculated to iteratively sim-
plify an input image while preserving essential fea-
tures. By doing that, LIVSS creates a series of sim-
plified layers, each of these layers contains varying
levels of detail. Then these layers are optimized to
create a high-quality vector representations with ad-
justable levels of fidelity.
The main strength of LIVSS is the ability to bal-
ance detail preservation and vectorization compact-
ness. Using semantic segmentation, the method pri-
oritizes meaningful regions first, with the possibility
of ignoring redundant details in the background. This
technique makes LIVSS effective for applications of
vectorizing images containing semantic meaningful
shapes.
Despite that, the performance of LIVSS is highly
dependent on the quality of its semantic segmentation.
Therefore, if segmentation fails to accurately delin-
eate complex objects or overlapping structures, the
resulting vectorized output may lose critical details
or introduce artifacts. Another limitation that might
appear in this method is that it might be unable to
segment unnecessary shapes, which can lead to low
quality images. It would be valuable to compare our
method with LIVSS, but at the time of writing this
paper, the LIVSS code is not publicly available.
2.2 SuperSVG
SuperSVG (Hu et al., 2024) represents a significant
advance in the field of image vectorization in 2024.
This method mainly utilize a superpixel-based frame-
work to decompose raster images into regions with
uniform colors and textures, thereby enabling effi-
cient vectorization. SuperSVG is the two-stage self-
training framework. In the first stage, the model re-
constructs the primary structure of the image using
superpixels, focusing on large, uniform areas in the
image. In the second stage, it improves the output by
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
832

enriching or adding fine-grained details, such as re-
gions with complicated shapes and textures.
One of the key strengths of SuperSVG is that it
balances computational efficiency and precision. Be-
cause by focusing on superpixels, the method reduces
the complexity of processing high-resolution images
while keeping an acceptable levels of detail in the out-
put.
SuperSVG also has some limitations, for example,
the reliance on superpixels can oversimplify complex
textures, which leads to less accurate reconstructions
in situations where the image is highly detailed. An-
other point to consider is that the two-stage can cause
an additional computational complexity that may not
be ideal tasks that prioritize computational efficiency.
2.3 SAMVG
SAMVG (Segment-Anything Model for Vector
Graphics) (Zhu et al., 2023), a multi-staged method
that uses the Segment-Anything Model (SAM) to per-
form general image segmentation. The first stage is
the process of retrieving Segmentation Masks, where
image is divided into a dense set of regions for cap-
turing complex boundaries and features. Next stages
are for approximation and optimization of the traced
shapes in the masks. In the final stage, these segments
are converted into a structured Scalable Vector Graph-
ics (SVG) format that incorporates detailed compo-
nents to enhance the quality of the output.
SAMVG also provides the ability to handle a wide
variety of image domains effectively, thanks to the ro-
bustness of SAM in segmenting diverse and complex
images. It is also computationally efficient as its fil-
tering and conversion steps are optimized to minimize
processing overhead without compromising the qual-
ity of the vectorized result. Therefore, SAMVG is
useful for applications requiring computational effi-
ciency and high quality output. However, during the
high dependence on the Segmentation model SAM,
its accuracy directly impacts the quality of the final
vector output. Therefore, in cases where segmenta-
tion struggles with overlapping or unclear objects, the
vector output may contain errors or inconsistencies.
2.4 EvoVec
Evolutionary Image Vectorization (Bazhenov et al.,
2024) is an evolutionary algorithm for image vector-
ization, it introduces a method that addresses very
common challenges in existing deterministic and ma-
chine learning-based methods. For example, a very
common challenge for deterministic algorithms is
handling color gradient. While for machine learn-
ing approaches, common challenges can be defining
curve numbers, computational complexity, and also
the struggle with gradient representations. EvoVec
faces these challenges by including mutations and
crossovers to iteratively refine vectorized images.
It also adaptively determines the number of curves
needed to accurately represent the input image. An-
other valuable feature of this method, is that it can
merge gradient-based path to give a better presenta-
tion of color transitions in the image. Experiments
of EvoVec demonstrated 15% improvement in pixel-
by-pixel mean square error (MSE) compared to other
state-of-the-art methods, with a competitive computa-
tional efficiency.
3 METHOD
The proposed method introduces a two-staged ap-
proach for complex images vectorization that aims
to address key challenges in path initialization, color
assignment, and optimization. Unlike existing meth-
ods, our approach ensures adaptive and accurate path
generation with a consistent color representation, re-
ducing unnecessary iterations, and improving over-
all fidelity. The process is clearly divided into two
main stages: Path Initialization and Path Optimiza-
tion, where in the first stage we initialize an accurate
or close to accurate path, remaining the need for only
few adjustments in the second stage to ensure a better
adjustment and alignment for the generated path.
3.1 Path Initialization
The path initialization stage is the foundation for effi-
cient and accurate vectorization. A path (or a vector)
is represented by a set of points that contours the tar-
get shape in the input image, and a color assigned to
the points contained inside that contour. In a layer-
wise vectorization technique, we define a set of lay-
ers, each containing a set of paths, these layers are
stacked hierarchically, where each layer introduces
new information. From that definition, we can notice
that each layer depends on previous set of layers, and
the first layer doesn’t depend on any layer (or we can
say depends on an empty layer). In order to extract
contours of each layer, a difference map is calculated
as the L
2
between the ground truth and the stack of
previous layers is calculated to define key regions of
variation. In order to enhance the quality of contours
extracted from these key regions, we use the Bayesian
optimization algorithm to fine-tune important param-
eters of operations applied to the difference map, such
as thresholding, quantization, and morphological re-
Layerwise Image Vectorization via Bayesain-Optimized Contour
833

finement. The color of each path is extracted using
the k-means clustering method (Frackiewicz et al.,
2019). Therefore, the output of this stage is an opti-
mized contour (a set of points) and its color, forming
by that a path that will be added to the current layer.
3.1.1 Contour Extraction
The initialization phase begins by generating a differ-
ence map between the ground truth (GT) image and
an initial predicted image (uniformly white). The fol-
lowing steps are applied to extract an efficient con-
tour:
1. Thresholding. Intensities in the difference map
below the threshold value are set to zero in order
to remove noise of small differences therefore to
isolate significant regions of variation.
2. Quantization. After thresholding, the remaining
pixel intensities are quantized to produce discrete
levels from the difference map. Quantization re-
lies on a range of intervals derived from the flat-
tened difference map, with keeping only central
quantized values to maintain optimal granularity.
3. Morphological Refinement. Morphological op-
erations (erosion and dilation) are used to refine
the quantized difference map (applying kernels
to the difference map to clear/close partial lines),
producing by that a well-defined path boundaries.
4. Component Analysis. Connected-component
analysis (connected components algorithm used
by OpenCV) identifies distinct regions in the re-
fined map and the contour of the largest connected
component is extracted and designated as the ini-
tial path.
3.1.2 Color Selection
After extracting the contour of the largest component,
we utilize the K-means clustering algorithm to extract
the color of that component in the ground truth (GT)
image. Color extraction steps are as follows:
• The region in the GT image corresponding to the
largest component in the difference map is ex-
tracted.
• In the extracted area from the GT image, only pix-
els close to boundary are considered, minimizing
interference from adjacent shapes.
• The K-means clustering algorithm is applied to
the extracted set of pixels (Frackiewicz et al.,
2019), and the dominant color (the centroid of the
largest cluster) is selected as the color assigned to
the path being initialized.
This method ensures that the assigned color accu-
rately reflects the shape’s identity while being unaf-
fected by neighboring regions.
3.1.3 Bayesian Optimization for Parameter
Tuning
Bayesian optimization is used to fine-tune key param-
eters (Nguyen, 2019) used in extracting contours from
the difference map: 1) The quantile interval parame-
ter used for determining the segmentation granularity;
2) The thresholding parameter used for filtering out
minor variations and noises for a better focus on sig-
nificant regions of interest; and 3) kernel size used in
morphological operations (erosion and dilation) that
aims for removing noises or closing partial paths. Fig-
ure 2 illustrates how different values of quantile in-
terval and thresholding parameters affect generated
mask and contour initialization.
3.1.4 Loss Function Design
The objective function used in the Bayesian optimiza-
tion algorithm is a composite loss function that bal-
ances between reconstruction accuracy, overlap mini-
mization, and path efficiency. The key components of
the loss function are:
• Reconstruction Loss, which ensures accuracy
and fidelity by penalizing differences between the
ground truth (GT) and predicted images:
L
Reconstruction
=
∑
(I
GT
− I
Pred
)
2
(1)
• Overlap Loss to discourage paths that overlap
with regions that already had a better prediction:
L
Overlap
=
∑
i, j
L
i, j
> L
Prev,i, j
∧L
Prev,i, j
< ε
(2)
Where L
i, j
is the current reconstruction loss of the
pixel i,j of the image after adding the current path,
and L
prev,i, j
is the previous reconstruction loss for
this pixel before adding the current path.
• Coverage Loss to encourage Bayesian optimiza-
tion process to select larger shapes to contour. Be-
cause if small shapes inside a bigger one were
contoured first, it will complicate the process of
contouring the large one later. Let S donate the
shape inside the predicted path, the coverage loss
formula is defined as follows:
L
Coverage
=
∑
(i, j)
1
(i,i)/∈S
(3)
Therefore, the final loss function used as objective
function for the Bayesian Optimization process is the
weighted sum of the three loss functions ζ
Bayesian
:
L
Bayesian
= L
Reconstruction
+λL
Overlap
+γL
Coverage
(4)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
834

Figure 2: The plot of the largest quantile in the difference map after applying thresholding and quantization with different
values for parameters: quantile interval and thresholding. Showing their effect on contour extraction process.
However, the newly initialized path can result in a
higher reconstruction error (the L
2
loss is larger than
before applying the new path), then the loss is set to
infinity, effectively rejecting the path during Bayesian
optimization.
3.2 Path Optimization
The goal of this stage is mainly to ensure that the path
resulted from the previous stage (represented as the
target shape contour and its color) is well aligned with
its corresponding shape in the target image. There-
fore, we define a composite loss function that ensures
a correct alignment, and smoothness of the path.
1. Reconstruction Loss: penalizes the deviation be-
tween the ground truth (GT) image and the pre-
dicted image.
L
reconstruction
=
∑
i, j,c∈{R,G,B}
I
GT,k,c
− I
pred,k,c
2
(5)
2. Laplacian Smoothness Loss: is designed to en-
sure the geometric smoothness of the path (Vartzi-
otis and Himpel, 2014) during the optimization
process. It prevents the points from being opti-
mized in random directions.
L
smooth
=
∑
i
P
i
−
1
2
(P
i−1
+ P
i+1
)
2
(6)
Where p
i
is the position of point i of the path pre-
dicted.
Therefore, the Laplacian Smoothness Loss is
added to encourage paths to adopt smooth, con-
tinuous shapes by reducing sharp angles or irreg-
ularities.
3. Overlap Loss: is similar to the overlap loss used
in the first stage 3.1, but instead of comparing the
current path with the currently predicted image,
we compare it with a 3D array that has the same
shape as the target image, and preserves the best
color assigned to each pixel across all previous it-
erations. The overlap loss is described in the fol-
lowing equation:
L
overlap
=
∑
i, j
L
i, j
> L
previ,j
) (7)
Where L
i, j
is the current reconstruction loss of the
pixel i,j of the image, and L
prev,i, j
is the lowest
reconstruction loss recorded for this pixel through
all previous iterations.
And finally, the total loss for the path optimization
stage is the weighted sum of these three losses, and
given by the following equation.
L
total
= L
reconstruction
+ αL
smooth
+ βL
overlap
(8)
This multi-objective optimization ensures that the re-
fined paths not only align accurately with the GT im-
age but also maintain smooth, visually appealing ge-
ometries.
This structured process ensures precise and effi-
cient path initialization, requiring minimal refinement
during the Path Optimization stage.
4 EXPERIMENTS AND RESULTS
In this section, we explore the behavior of our method
(LIVBOC) and compare it with the LIVE method (Ma
et al., 2022) from different aspects on a set of 30 im-
ages, varying from simple (it may need about 16 to 32
paths for the LIVE method) to complex (it may need
about 256 to 512 paths), while for LIVBOC method,
it can use half of this number of paths and maybe even
less.
4.1 Experimental Setup
The experiments were carried out on an NVIDIA
GeForce MX110 GPU, using Python as the program-
ming language. The Adam optimizer is used for
optimizing paths in both methods under evaluation:
LIVBOC and LIVE. Optimization hyperparameters
such as learning rates, iteration counts, and LIVBOC
initialization strategies are different from the LIVE
hyperparameters.
Hyperparameter Optimization. For LIVBOC, we
set the number of clusters in the K-means algorithm
to 3, and the number of segments of each path to 4,
with the total number of points adaptively adjusted
Layerwise Image Vectorization via Bayesain-Optimized Contour
835

based on the shape contours. The LIVE method al-
gorithm generally sets a fixed total of 12 points for
each path, and these points are evenly divided over the
same number of segments. Both methods were con-
figured without stroke training (the stroke width is set
to zero). In terms of loss functions, the overlap loss
function is weighted as 1.0, and the smoothness loss
weight is set to 0.05, while the LIVE method used a
Xing loss weight of 0.01.
In terms of learning rates, in experiments of our
method, the high efficiency of our loss functions gives
us the confidence to set the point learning rate to 2.0,
while for LIVE it is set to 1.0 to avoid overshooting.
The fill color learning rate in LIVE is set to 0.01,
while for LIVBOC, it is set to 0.0. The number of
iterations is set to 100 for our method, while for the
LIVE method it is set to 500 iterations.
We conducted experiments on both methods using
the same 30 images, which provide a range of color
variations and shape contours suitable for vectoriza-
tion tasks.
4.2 Results and Discussion
Quantitative Comparison. In order to make a quan-
titative comparison, We compare calculate the value
of 6 metrics for both methods on the same images,
metrics are: 1) L
2
loss, to compare information
preservation; 2) time consumed to compare computa-
tional efficiency; 3) file size to compare vectorization
compactness and efficiency in points generation; 4)
path number to compare redundancy of information;
5) PSNR, to assess the quality of reconstruction and
signal fidelity; and 6) SSIM, to evaluate the structural
similarity and perceptual quality of the results (Hor
´
e
and Ziou, 2010).
As shown in Table 1, our method outperforms
the LIVE method, achieving a lower mean and stan-
dard deviation for L
2
loss, which means that not only
LIVBOC gives better reconstruction fidelity, but also
it gives a more consistent and reliable reconstruc-
tion than LIVE. SSIM standard deviation for LIVE
is slightly less than for LIVBOC, but the good differ-
ence between the mean of SSIM values registered by
LIVBOC and by LIVE still highlights the LIVBOC’s
superiority over LIVE in vectorizing images with bet-
ter perceptual quality.
The LIVBOC method also generates smaller SVG
file sizes and reduces the average number of paths,
which indicates the improvement of vectorization ef-
ficiency while avoiding information redundancy, and
at the same time, without compromising accuracy.
LIVBOC generates contour-based paths that are rep-
resented by a non-fixed number of points depending
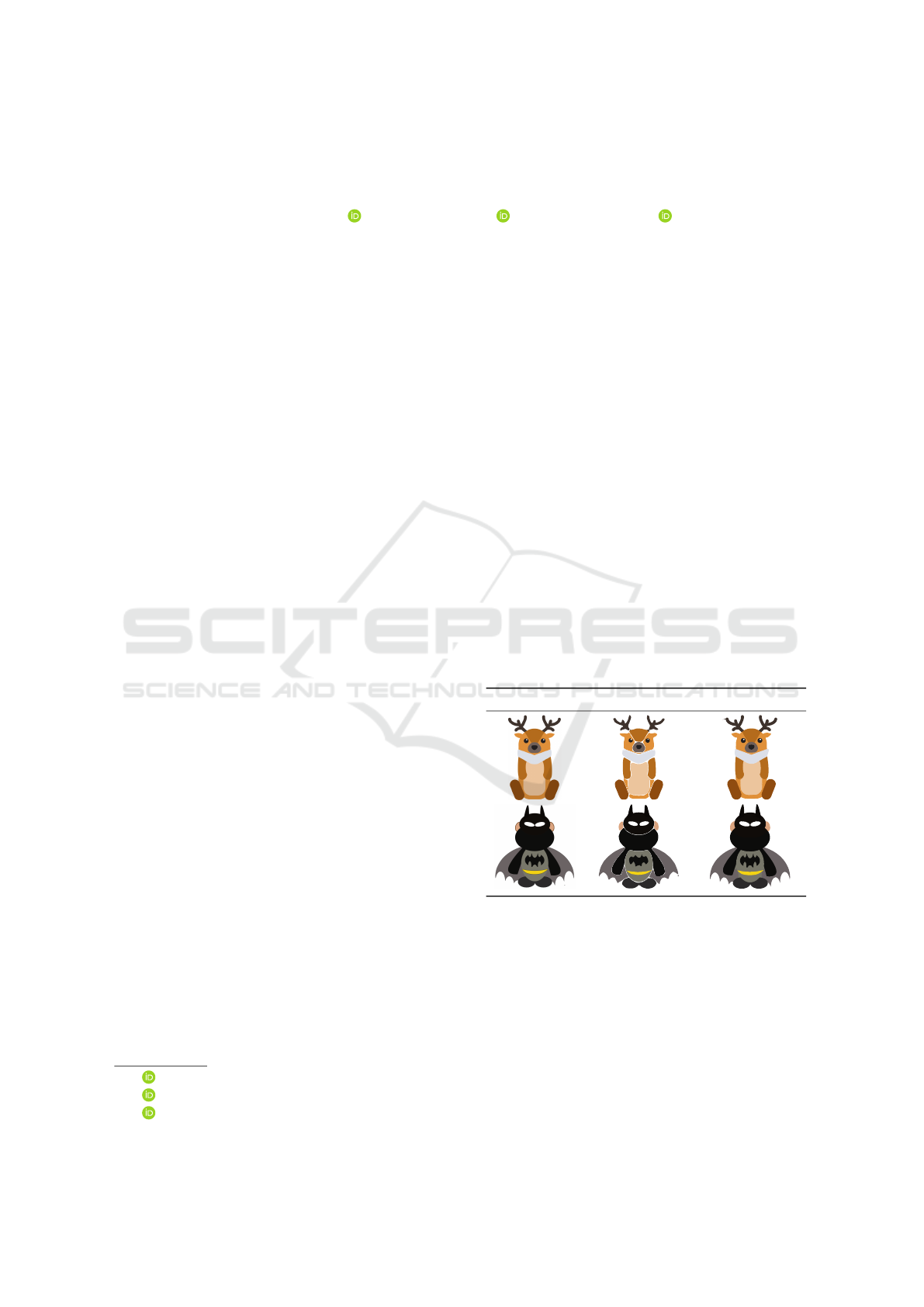
Target LIVE LIVBOC
Figure 3: Comparison of path efficiency between LIVE
and LIVBOC methods. LIVBOC assigns a single path per
shape, while LIVE generates multiple paths for the same
shape.
on the size of the shape contoured. This feature helps
LIVBOC to represent each shape with a single path,
even if this target shape is partially covered by other
shapes in the ground-truth image. By minimizing in-
formation duplication—where a single shape would
otherwise require multiple paths for representation (as
is the case with LIVE), LIVBOC reduces the size of
SVG output files, as shown in Figure 3 and evidenced
in Table 1. The generation of contour-based paths also
helps in reducing time needed for reaching the target
shape, therefore, reducing overall time of the vector-
ization process.
Visual Comparison. In Figure 4, we show the vector-
ization results for samples of different levels of com-
plexity.
In simple samples, while both methods give accu-
rate vectorization, LIVE still misses some important
paths, resulting in not only a lower perceptual quality
of the output image, but also in consuming a higher
number of paths and a larger storage for the output
file due to information duplication.
Medium samples show a clear superiority of the
LIVBOC performance where we can notice how
LIVE is generating overlapping shapes, where vec-
tors are newer covering previous correct ones, while
our method avoids that mistake thanks to the usage of
the overlap loss function.
Complex samples show the core point of power
of our method. One of the limitations of the LIVE
method observed during experiments is its tendency
to generate random paths when no further shapes are
available for vectorization. This behavior can de-
crease reconstruction fidelity and lead to the loss of
perceptual quality. In contrast, the Bayesian opti-
mization step in LIVBOC enables it to consistently
identify missing paths, as demonstrated in complex
samples with fine details.
As can be seen in Table 1, our LIVBOC method
significantly reduces processing time compared to the
LIVE baseline, while at the same time, achieving sim-
ilar or better results in just 100 iterations versus the
500 iterations required by LIVE. This efficiency is
due to LIVBOC’s contour-based initialization, which
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
836
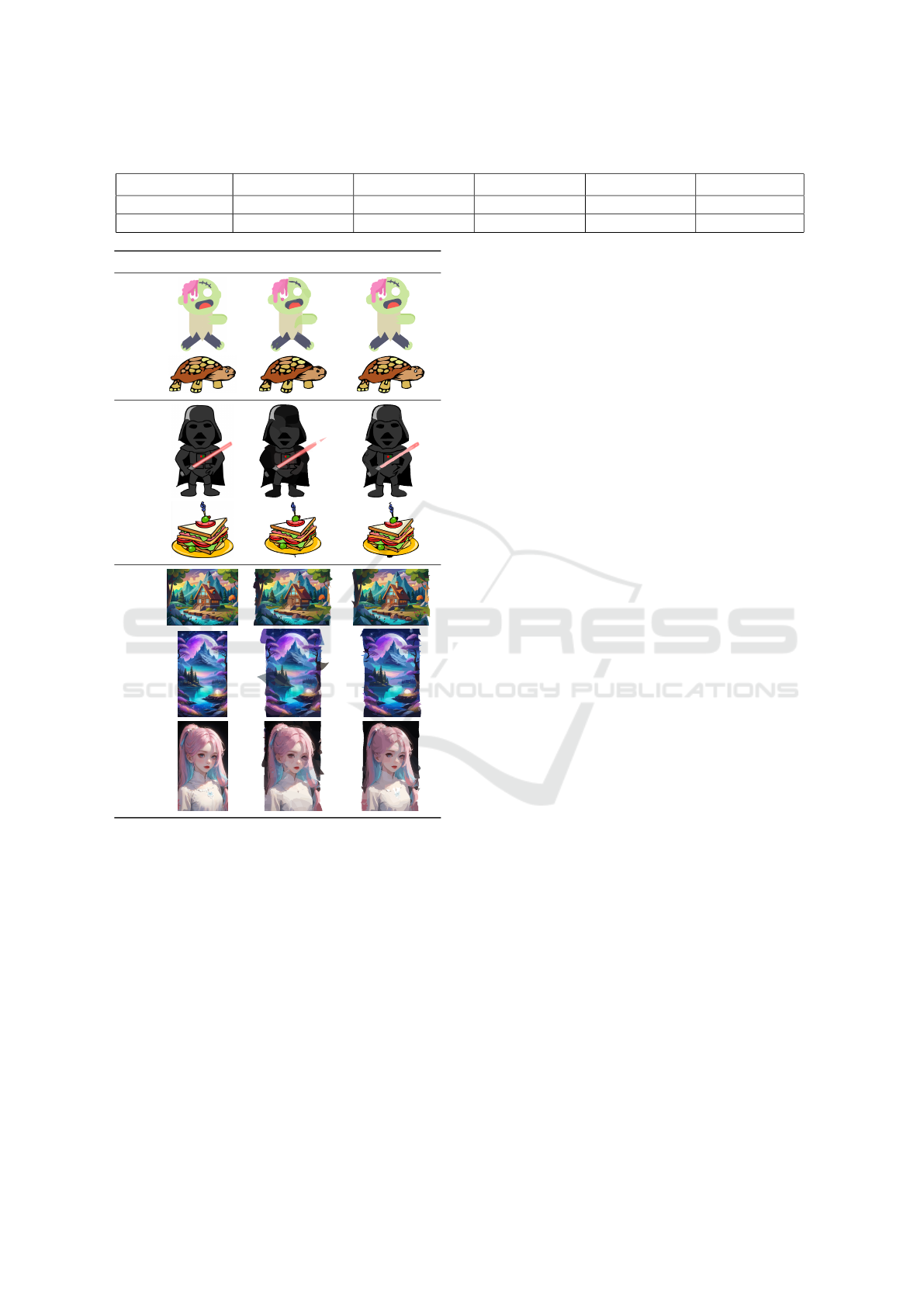
Table 1: Comparison between LIVE and our LIVBOC across 30 images of different paths’ complexity.
Metric L
2
(Mean ± SD) SSIM (Mean ± SD) Time, seconds File Size (KB) Path Number
LIVE 0.0107 ± 0.0069 0.8943 ± 0.0784 22470 62.5 99.34
LIVBOC (ours) 0.0056 ± 0.0038 0.9334 ± 0.0788 7802 56.48 46.05
Target LIVE LIVBOC (ours)
SimpleMediumComplex
Figure 4: Samples of LIVE and our method results on im-
ages of various complexities.
is optimized using Bayesian methods. In contrast,
LIVE initializes small Bezier paths using fixed, non-
optimized parameter values, resulting in the need for
more refinement for paths during optimization.
5 CONCLUSION
In this work, we have introduced LIVBOC, a novel
method for image vectorization that addresses key
challenges in path initialization, color assignment,
and optimization. With the Bayesian-contour-based
initialization strategy, LIVBOC achieves a significant
reduction in computational overhead while maintain-
ing a better preservation of information and recon-
struction fidelity. The method adaptively sets the
number of points required for each shape, providing
efficient path generation that minimizes redundancy
and file size.
The experimental results indicate that LIVBOC
outperforms the baseline LIVE method in all key
metrics. LIVBOC achieves a lower L
2
loss, faster
processing times, and more compact SVG represen-
tations, all while requiring fewer paths to represent
complex images. Qualitative comparisons further
highlight LIVBOC’s ability to preserve intricate de-
tails and avoid artifacts, resulting in smoother and
more accurate vectorizations, thus, a user can manip-
ulate with vectors more easily.
These results establish LIVBOC as a robust and
efficient alternative to existing methods, with applica-
tions in scalable vector graphics, digital design, and
computational graphics. Future work will focus on
enhancing the LIVBOC coloring capabilities. Specif-
ically, our goal is to implement and optimize more
advanced coloring techniques, such as gradients and
pattern-based fills, in addition to solid fill.
ACKNOWLEDGMENTS
The research was supported by the ITMO University,
project 623097 ”Development of libraries containing
perspective machine learning methods”.
REFERENCES
Arbel
´
aez, P., Maire, M., Fowlkes, C., and Malik, J. (2011).
Contour detection and hierarchical image segmenta-
tion. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 33(5):898–916.
Bazhenov, E., Jarsky, I., Efimova, V., and Muravyov, S.
(2024). Evovec: Evolutionary image vectorization
with adaptive curve number and color gradients. In
Affenzeller, M., Winkler, S. M., Kononova, A. V.,
Trautmann, H., Tu
ˇ
sar, T., Machado, P., and B
¨
ack,
T., editors, Parallel Problem Solving from Nature –
PPSN XVIII, pages 383–397, Cham. Springer Nature
Switzerland.
Dziuba, M., Jarsky, I., Efimova, V., and Filchenkov, A.
(2023). Image vectorization: a review.
Layerwise Image Vectorization via Bayesain-Optimized Contour
837

Frackiewicz, M., Mandrella, A., and Palus, H. (2019). Fast
color quantization by k-means clustering combined
with image sampling. Symmetry, 11.
Frazier, P. I. (2018). A tutorial on bayesian optimization.
Hor
´
e, A. and Ziou, D. (2010). Image quality metrics: Psnr
vs. ssim. In 2010 20th International Conference on
Pattern Recognition, pages 2366–2369.
Hu, T., Yi, R., Qian, B., Zhang, J., Rosin, P. L., and Lai, Y.-
K. (2024). Supersvg: Superpixel-based scalable vec-
tor graphics synthesis.
Ma, X., Zhou, Y., Xu, X., Sun, B., Filev, V., Orlov, N.,
Fu, Y., and Shi, H. (2022). Towards layer-wise image
vectorization.
Nguyen, V. (2019). Bayesian optimization for accelerat-
ing hyper-parameter tuning. In 2019 IEEE Second In-
ternational Conference on Artificial Intelligence and
Knowledge Engineering (AIKE), pages 302–305.
Polewski, P., Shelton, J., Yao, W., and Heurich, M. (2024).
Segmenting objects with bayesian fusion of active
contour models and convnet priors.
Snoek, J., Larochelle, H., and Adams, R. P. (2012). Prac-
tical bayesian optimization of machine learning algo-
rithms.
Sorkine, O., Cohen-Or, D., Lipman, Y., Alexa, M., R
¨
ossl,
C., and Seidel, H.-P. (2004). Laplacian surface
editing. In Proceedings of the 2004 Eurograph-
ics/ACM SIGGRAPH symposium on Geometry pro-
cessing, pages 175–184.
Vartziotis, D. and Himpel, B. (2014). Laplacian smoothing
revisited.
Wang, Z., Huang, J., Sun, Z., Cohen-Or, D., and Lu, M.
(2024). Layered image vectorization via semantic
simplification.
Zhu, H., Chong, J. I., Hu, T., Yi, R., Lai, Y.-K., and Rosin,
P. L. (2023). Samvg: A multi-stage image vectoriza-
tion model with the segment-anything model.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
838
