
Self-Supervised Transformers for Long-Term Prediction of Landsat
NDVI Time Series
Ido Faran
1
, Nathan S. Netanyahu
1,2
, Elena Roitberg
3
and Maxim Shoshany
3
1
Dept. of Computer Science, Bar-Ilan University, Ramat Gan 5290002, Israel
2
Dept. of Computer Science, College of Law and Business, Ramat Gan 5257346 , Israel
3
Faculty of Civil and Environmental Engineering, Technion Israel Institute of Technology, Haifa 3200003, Israel
Keywords:
Deep Learning, Transformers, Self-Supervised Learning, Remote Sensing.
Abstract:
Long-term satellite image time-series (SITS) analysis presents significant challenges in remote sensing, es-
pecially for heterogeneous Mediterranean landscapes, due to complex temporal dependencies, pronounced
seasonality, and overarching global trends. We propose Self-Supervised Transformers for Long-Term Pre-
diction (SST-LTP), a novel framework that combines self-supervised learning, temporal embeddings, and
a Transformer-based architecture to analyze multi-decade Landsat data. Our approach leverages a self-
supervised pretext task to train Transformers on unlabeled data, incorporating temporal embeddings to capture
both long-term trends and seasonal variations. This architecture effectively models intricate temporal patterns,
enabling accurate predictions of the Normalized Difference Vegetation Index (NDVI) across diverse tempo-
ral horizons. Using Landsat data spanning 1984–2024, SST-LTP achieves a Mean Absolute Error (MAE) of
0.0338 and an R
2
value of 0.8337, outperforming traditional methods and other neural network architectures.
These results highlight SST-LTP as a robust tool for long-term environmental monitoring and analysis.
1 INTRODUCTION
Image motion and sequence prediction have attracted
significant attention in recent years (Verma et al.,
2013; Mo et al., 2025). Time-series prediction aims
to uncover temporal patterns that are often hidden
in spatially complex scenes, where short, medium,
and long-term processes occur and interact simultane-
ously. Self-supervised machine learning approaches
offer unique advantages for such tasks. They oper-
ate without constraints or assumptions and, most im-
portantly, do not require labeled data. By learning
from past time series, these methods inherently cap-
ture the representation of “predicted images”. Apply-
ing this technique to environmental time series is cru-
cial for understanding ecosystems’ responses to cli-
matic and anthropogenic changes. Our study eval-
uates this approach in a desert fringe environment
of the southeastern Mediterranean region, which is
severely threatened by desertification.
Earth observation satellites have become invalu-
able tools for analyzing such dynamic environmental
processes, collecting data about our planet’s surface
and ecosystems for over half a century. These plat-
forms are crucial for monitoring global environmen-
tal changes, including vegetation patterns and long-
term ecological trends. The Landsat TM mission, op-
erational since 1984, has been pivotal in this field,
enabling continuous monitoring of vegetation health,
land use changes, and ecosystem dynamics across di-
verse landscapes. Landsat satellites capture multi-
spectral imagery globally every 16 days at 30 [m]
resolution. These images are organized into Satellite
Image Time Series (SITS), which provide a tempo-
ral dimension to Earth observation data. SITS allows
researchers to analyze changes over time, revealing
patterns and trends that might be invisible by human
visual interpretation. This temporal aspect is partic-
ularly valuable for land cover classification, change
detection, and predictive modeling of global environ-
mental trends (Zhu et al., 2019).
The primary objective of time- series analysis
in remote sensing is to estimate future values accu-
rately based on historical observations. These capa-
bilities can be used to forecast future images, recon-
struct missing data due to cloud cover or sensor mal-
functions, and facilitate data fusion across multiple
sources. Time-series analysis enhances the detection
of abrupt and gradual changes in land cover and land
use, providing crucial insights into long-term Earth
surface processes (G
´
omez et al., 2016).
However, time-series analysis in remote sensing
faces unique challenges. It requires consideration of
complex temporal dependencies, including seasonal-
542
Faran, I., Netanyahu, N. S., Roitberg, E. and Shoshany, M.
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series.
DOI: 10.5220/0013381700003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 542-552
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ity in natural systems and abrupt changes in human
activities. Global trends like climate change introduce
gradual shifts that are difficult to distinguish from
natural variability. Additionally, data inconsistencies
due to cloud cover and sensor limitations complicate
the development of robust predictive models. Ad-
dressing these challenges is crucial for accurate long-
term environmental monitoring and change detection
(Zhu, 2017; Kennedy et al., 2018). See Figure 1 for
an example of Normalized Difference Vegetation In-
dex (NDVI) time-series analysis across different loca-
tions.
We introduce Self-Supervised Transformers for
Long-Term Prediction (SST-LTP), a novel approach
for Landsat time-series analysis in diverse Mediter-
ranean landscapes. This method combines self-
supervised learning, temporal embedding techniques,
and a Transformer-based architecture to predict NDVI
values over both short-term (1–2 years) and long-
term (5–10+ years) horizons. SST-LTP is built on
three key components: (1) A self-supervised pre-
text task that trains the Transformer model to infer
NDVI values from historical observations, (2) a tem-
poral embedding strategy designed to capture persis-
tent trends and seasonal patterns, and (3) a robust
Transformer architecture optimized to handle com-
plex temporal dependencies, long-range interactions,
and seasonal variability. By leveraging the tempo-
ral dynamics inherent in satellite data, SST-LTP pro-
vides accurate and reliable predictions, addressing
critical challenges in long-term environmental mon-
itoring and land-use analysis.
Our main contributions are as follows:
1. Presentation of a self-supervised training method
for long-term SITS data, capable of learning from
unlabeled multi-decade data.
2. Introduction of a temporal embedding technique
that captures both long-term trends and seasonal
patterns to enhance the model’s ability to make ac-
curate predictions across different temporal hori-
zons.
3. Experimental evaluation of our method’s perfor-
mance on Landsat data from Mediterranean re-
gions, demonstrating its prediction capability of
future short-term and long-term NDVI values
based on varying lengths of historical data se-
quences.
The remainder of this paper is organized as fol-
lows: Section 2 provides an overview of related work,
covering traditional statistical methods, deep learn-
ing approaches, and self-supervised learning tech-
niques for time-series analysis. Section 3 describes
the proposed Self-Supervised Transformers for Long-
Term Prediction (SST-LTP) framework, detailing its
architecture, temporal embedding strategies, and self-
supervised training methodology. Section 4 presents
the experimental setup, including the study area,
dataset, and implementation details, followed by an
in-depth evaluation of the model’s performance. Sec-
tion 5 compares the proposed method with baseline
models to highlight its advantages and limitations. Fi-
nally, Section 6 concludes the paper by summariz-
ing the findings and outlining directions for future re-
search.
2 RELATED WORK
2.1 Traditional Statistical Methods
Time-series prediction in remote sensing has tradi-
tionally relied on techniques such as Cellular Au-
tomata Markov Chain (CA-Markov), Random Forests
(RFs), and Autoregressive Integrated Moving Aver-
age (ARIMA) models (G
´
omez et al., 2016). Addi-
tionally, models that explicitly incorporate seasonal-
ity, such as Seasonal Autoregressive Integrated Mov-
ing Average (SARIMA) (Box et al., 2015) (Yan et al.,
2022) and Facebook Prophet (Taylor and Letham,
2018), have been widely utilized for temporal fore-
casting tasks in various domains, including vegetation
index prediction and phenology analysis. These mod-
els are particularly adept at handling periodic patterns
and trend decomposition but may struggle with the
complex, non-linear relationships and missing data
inherent in satellite imagery time series.
More recently, hybrid approaches combining
traditional statistical methods with machine learn-
ing concepts have emerged. For example, hy-
brid SARIMA-ANN models have shown potential in
leveraging the strengths of statistical seasonality mod-
eling and data-driven learning (Ruiz-Aguilar et al.,
2014).
2.2 Deep Learning for Time-Series
Analysis
Advancements in deep learning have further revo-
lutionized time-series analysis. Convolutional Neu-
ral Networks (CNNs) and Recurrent Neural Net-
works (RNNs), including Long Short-Term Memory
(LSTM) networks, have demonstrated efficacy in cap-
turing complex patterns in remote sensing time-series
data (Zhu, 2017).
Transformers, initially developed for natural lan-
guage processing (Vaswani et al., 2017), have also
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series
543
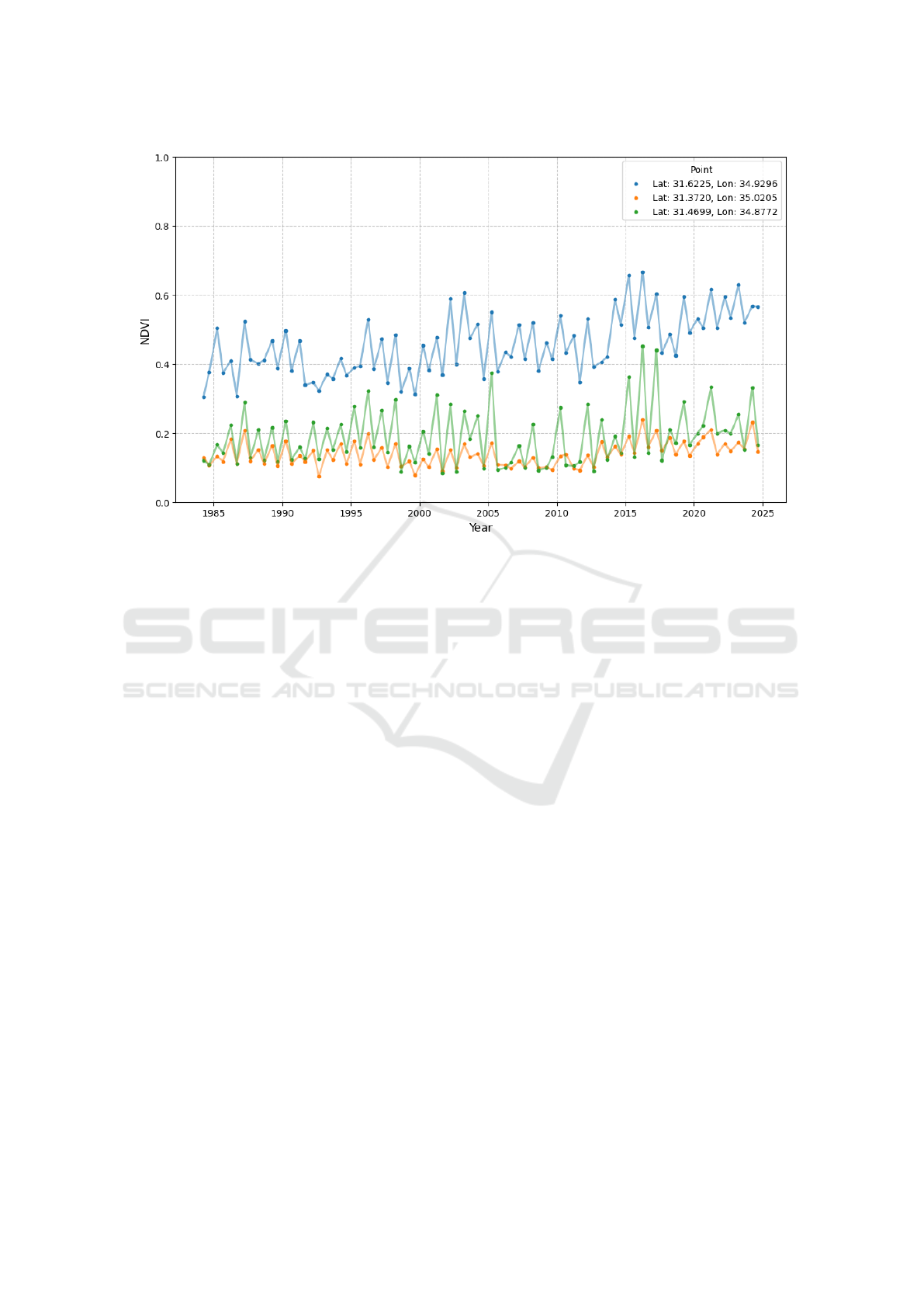
Figure 1: Time series of NDVI values from 1985 to 2024 for three samples. The plot highlights seasonal variability and
long-term trends, showing NDVI growth across all samples, with the first sample exhibiting the most noticeable increase,
indicating significant vegetation growth.
been adapted for time-series analysis due to their
ability to model long-term dependencies effectively.
Key advancements include the Informer model (Zhou
et al., 2021), which introduces a sparse self-attention
mechanism to improve scalability for long sequence
time-series forecasting while maintaining the abil-
ity to capture complex temporal patterns. Similarly,
the Temporal Fusion Transformer (TFT) by (Lim
et al., 2021) provides an interpretable framework for
multi-horizon time-series forecasting by integrating
local and global context information with a focus on
feature-level attention, emphasizing both scalability
and interpretability.
The Crossformer model (Zhang and Yan, 2023)
further enhances Transformer capabilities by ad-
dressing cross-dimension dependencies in multivari-
ate time-series data, enabling more accurate model-
ing of interrelated features. Additionally, the iTrans-
former model (Liu et al., 2023) adopts an inverted
Transformer architecture to better capture multivari-
ate correlations with improved computational effi-
ciency, highlighting the evolution of Transformer de-
signs for time-series analysis.
In the domain of remote sensing, Transformers
have shown significant potential for modeling spa-
tiotemporal data. The Earthformer model (Gao et al.,
2022) extends Transformer architectures by incorpo-
rating a cuboid attention mechanism, which segments
data into smaller, manageable units for efficient spa-
tiotemporal dependency modeling. This design en-
ables an Earthformer to capture the intricate interac-
tions between spatial and temporal dimensions in re-
mote sensing tasks. Similarly, the RingMo foundation
model (Sun et al., 2022) uses masked image mod-
eling to bridge the gap between natural and remote
sensing images, enhancing feature extraction and gen-
eralization. Building on this foundation, RingMo-
Sense (Yao et al., 2023) introduces a triple-branch ar-
chitecture for spatiotemporal evolution disentangling,
enabling effective spatial and temporal pattern extrac-
tion for remote sensing applications.
Drawing on architectural innovations, the above
Transformer models highlight their potential to
handle remote sensing time-series data’s complex,
multi-dimensional nature, bridging the gap between
general-purpose time-series analysis and domain-
specific requirements. Indeed, such innovations have
been critical for improving the scalability and accu-
racy of time-series forecasting, particularly in han-
dling long-term dependencies and multi-modal in-
puts. This makes them especially relevant for remote
sensing applications.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
544
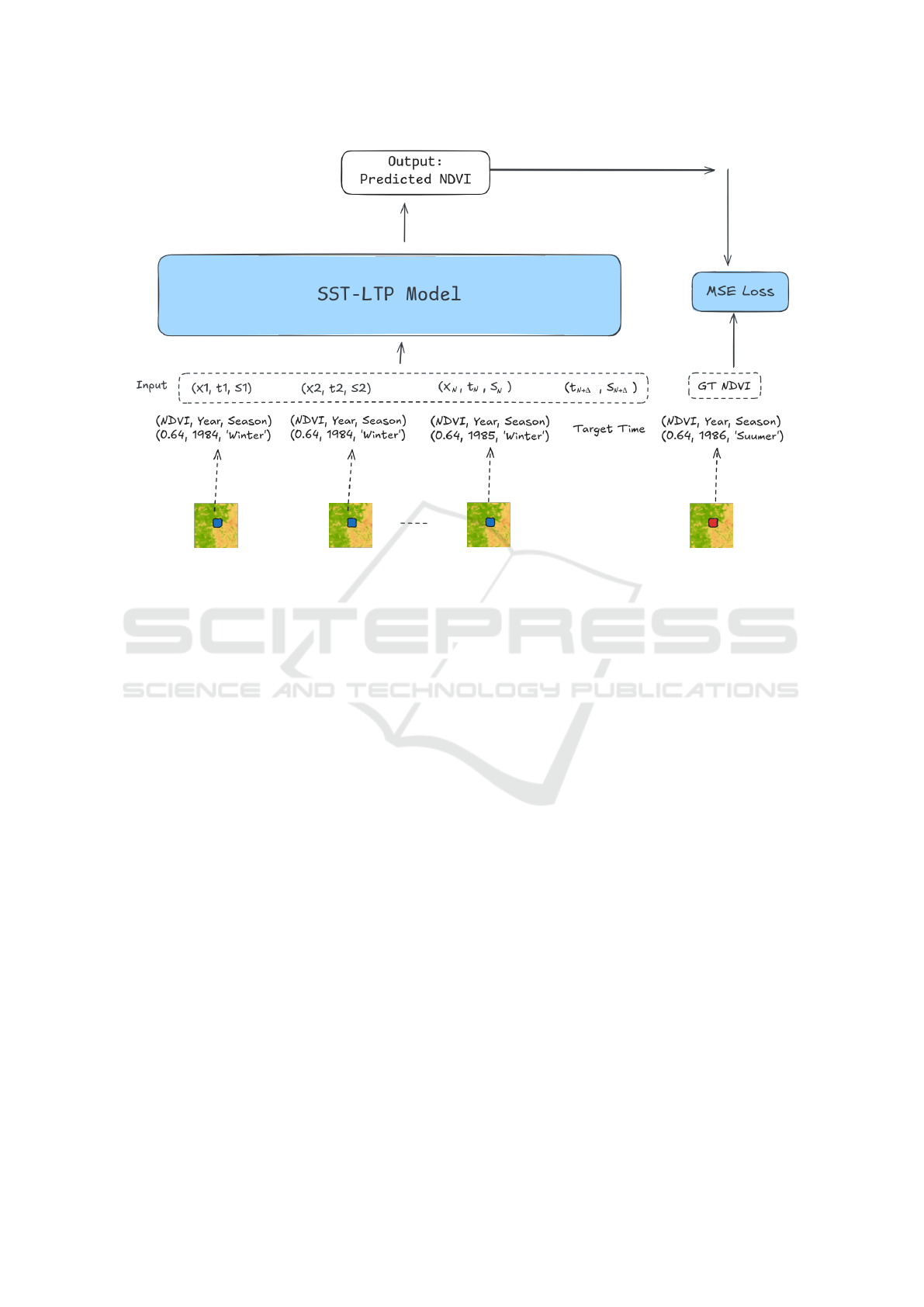
Figure 2: The training framework of the proposed Self-Supervised Transformers for Long-Term Prediction (SST-LTP) model.
The input consists of a sequence of (NDVI, Year, Season) data for a single pixel across multiple timestamps and a specified
target time. The model predicts the NDVI value for the target time, which is compared against the ground truth NDVI using
MSE loss. Model weights are updated through backpropagation.
2.3 Self-Supervised Learning
Approaches
Self-supervised learning has emerged as a promising
approach to address one of the key challenges in re-
mote sensing and satellite image analysis, i.e., the col-
lection of labeled data. Unlike traditional datasets, la-
beling satellite imagery requires expert knowledge, is
labor-intensive, and is often infeasible for large-scale,
diverse geographical areas. Additionally, changes in
land cover, climate, and sensor types can further com-
plicate the creation of consistent labels across time
and regions. Self-supervised learning mitigates this
issue by leveraging abundant unlabeled data to cre-
ate pseudo-supervised tasks (Miller et al., 2024). Re-
cent advancements include the self-supervised train-
ing scheme for SITS classification (Yuan and Lin,
2020) and the Presto model (Tseng et al., 2023),
a lightweight pre-trained transformer designed for
pixel-time-series that leverages multi-modal data.
However, current self-supervised methods typi-
cally focus on shorter time sequences, e.g., one-year
sequences of Sentinel-2 data (Yuan and Lin, 2020;
Moskola
¨
ı et al., 2021), and are often restricted to agri-
cultural areas (Rußwurm and K
¨
orner, 2018). Further-
more, many of these approaches rely on autoregres-
sive prediction techniques, where the model predicts
the next value in a sequence based on prior obser-
vations. While effective for short-term predictions,
these methods face significant challenges when ex-
tended to long-term forecasting. Autoregressive mod-
els require iterative predictions to reach farther into
the future, leading to error accumulation, as inaccu-
racies in earlier predictions propagate and compound
over time. Additionally, this iterative process incurs
high computational cost and time complexity, as the
model must be repeatedly activated for each step in
the sequence, making it inefficient for long-term anal-
yses. These limitations are particularly pronounced
in the context of analyzing long-term time series in
heterogeneous Mediterranean landscapes, which in-
volve complex seasonality, human-induced changes,
climate trends, sensor variations, and data quality is-
sues (Zhu et al., 2019).
While these advancements have propelled time-
series analysis in remote sensing, significant chal-
lenges remain when aiming to capture extended his-
torical ranges and the complex seasonality inherent in
remote sensing data. This work addresses these gaps
by introducing a method specifically tailored to long-
term NDVI data from a Mediterranean setting. Our
approach learns inherent temporal patterns directly
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series
545

from the data, enabling the capture of persistent trends
and seasonal cycles across multiple decades. Un-
like prior methods that emphasize short-duration se-
quences or broader, homogeneous regions, our frame-
work focuses on modeling the extended-range evolu-
tion of a single, heterogeneous landscape.
In contrast to autoregressive methods that rely on
iterative predictions to extend into the future, our ap-
proach avoids repeated model activations by directly
forecasting long-term temporal patterns in a single
step. This design minimizes computational overhead
and avoids the error accumulation typical of autore-
gressive techniques. By focusing on domain-specific
temporal embeddings and leveraging a robust archi-
tecture, this work advances the understanding of how
ecosystems transform over extended periods, address-
ing critical gaps left by existing methods in time-
series analysis.
3 PROPOSED METHOD
Figure 2 illustrates our proposed training method,
which treats time-series prediction as a self-
supervised learning task. We leverage the temporal
nature of long-term satellite imagery to train a deep
learning model without explicitly labeled data. The
process involves feeding the model with a sequence
of past satellite images, from which it predicts sub-
sequent (NDVI) values. These predictions are then
compared against the actual observed values from the
time-series data. The model is subsequently trained to
minimize the difference between its predictions and
the true values. This approach harnesses the inher-
ent temporal structure of satellite imagery, enabling
the model to learn patterns and trends without manual
labeling. The model refines its forecasting capabili-
ties over time by continuously predicting and adjust-
ing future states based on real observations.
Formally, we define our input as a time-series se-
quence
O = {(x
1
,t
1
,s
1
),. ..,(x
N
,t
N
,s
N
)} (1)
for a single pixel, where N is the number of obser-
vations. Each tuple (x
i
,t
i
,s
i
) represents an obser-
vation, where x
i
is the NDVI value, t
i
is the year,
and s
i
∈ {“Winter”,“Summer”} is the season. Our
model’s task is to predict the NDVI value for a speci-
fied future time point, defined by N +∆, where ∆ > 0.
The prediction can be expressed as
ˆx
N+∆
= f (O,t
N+∆
,s
N+∆
) (2)
where f is our deep learning model that learns to fore-
cast NDVI values based on past patterns and the de-
sired future time point.
To train the model, we utilize the inherent tempo-
ral structure of the satellite imagery data. The model
learns to predict future NDVI values based on the se-
quence of past observations. We compare the model’s
predictions ˆx
N+∆
against actual NDVI values x
N+∆
using a loss function L( ˆx
N+∆
,x
N+∆
). We update the
model’s parameters through iterative backpropagation
to minimize this loss. This process continues, pro-
gressively improving the model’s ability to capture
and forecast NDVI patterns over time.
Figure 3 illustrates the architecture of the
Transformer-based deep learning model. It consists of
the following three main parts: (1) Observation Em-
bedding, (2) Transformer Encoder, and (3) Regres-
sion Decoder.
3.1 Observation Embedding
The observation embedding layer projects the input
sequence {(x
1
,t
1
,s
1
),..., (x
N
,t
N
,s
N
)} into a higher-
dimensional feature space, preserving intrinsic data
relationships. This embedding comprises three com-
ponents:
1. NDVI Embedding: A linear dense layer projects
the NDVI sequence X
1
,..., X
N
into a high-
dimensional vector space.
2. Temporal Encoding: A continuous embedding
space represents years and seasons, ensuring that
temporally close points have similar representa-
tions while accounting for seasonal cycles. For a
time point with year t and season s, we compute a
normalized time value
t
′
=
2(t − t
start
) + s
2(t
end
−t
start
+ 1)
(3)
where t
start
and t
end
are the dataset’s temporal
bounds, and s ∈ {0, 1} denotes the season. The
final temporal embedding is calculated via:
E(t
′
) =
t
′
,sin(2πt
′
),cos(2πt
′
),. ..,
sin(2πkt
′
),cos(2πkt
′
)
(4)
where d is the dimensional encoding and k =
⌊(d − 1)/2⌋.
3. Positional Encoding (PE): The temporal order of
years and seasons (t
1
,s
1
),..., (t
N
,s
N
) is encoded
via PE (Devlin, 2018).
The final observation embedding O
i
for each time
point i is the element-wise sum of these components:
O
i
= NDVI
i
+ PE
i
+ E(t
i
) (5)
This formulation captures both long-term trends
and seasonal patterns in NDVI data, with proximate
time points having similar representations in the em-
bedding space.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
546
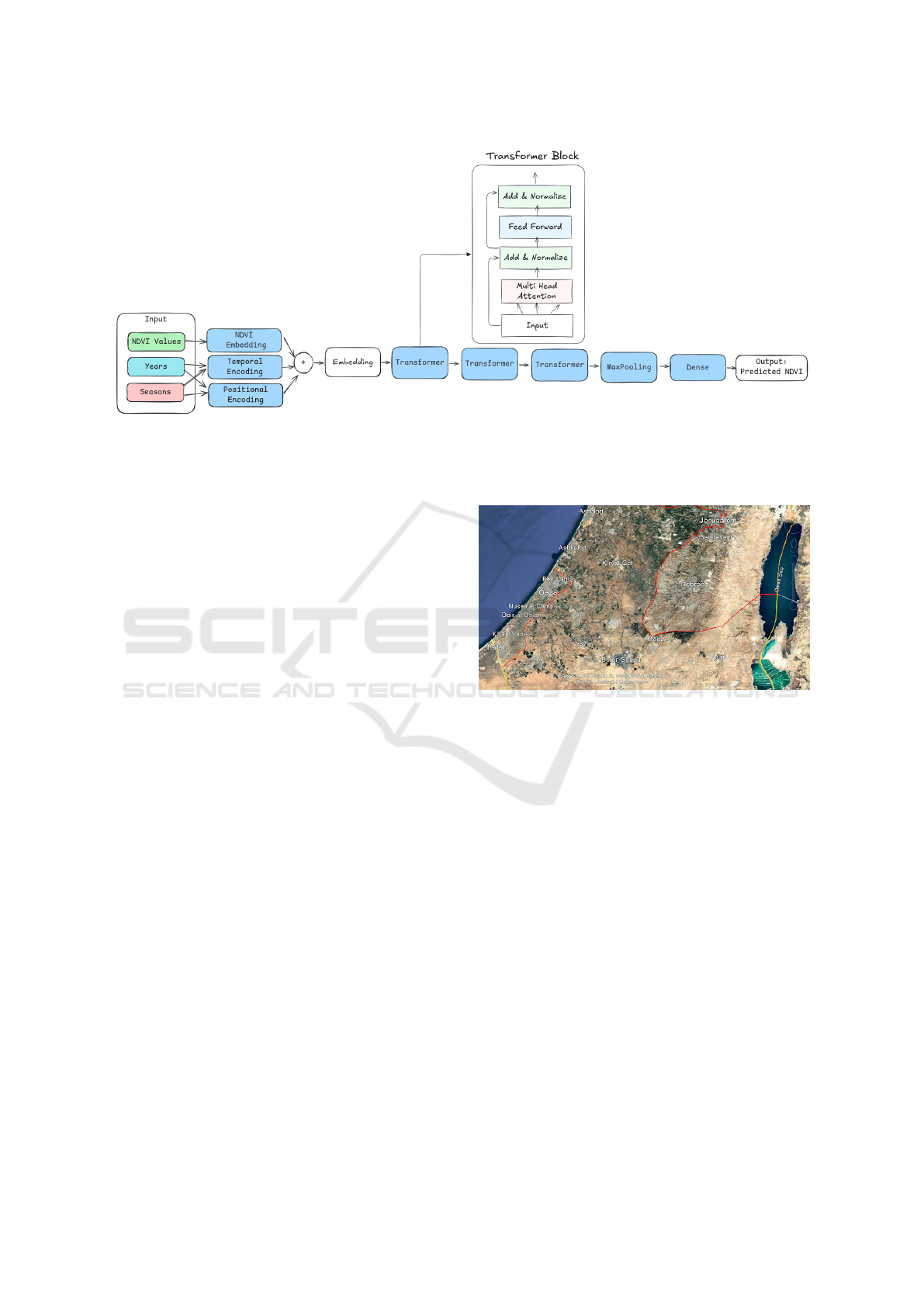
Figure 3: Architecture of the Self-Supervised Transformers for Long-Term Prediction (SST-LTP) model. Input (NDVI, Year,
Season) is processed through three embedding channels: NDVI Embedding (to capture NDVI patterns), Temporal Encoding
(to model year/seasonal patterns), and Positional Encoding (to represent sequence order). The combined embedding passes
through Transformer blocks, followed by MaxPooling and a dense layer for aggregation and final NDVI prediction.
3.2 Transformer Encoder
The embedded time series is processed through
stacked Transformer blocks, similar to the BERT ar-
chitecture (Devlin, 2018), employing multi-head at-
tention mechanisms. Each block generates progres-
sively higher-level representations, building upon the
output of the previous block. This iterative pro-
cess yields encoded features that capture local and
global temporal dependencies, effectively represent-
ing the complex patterns in the NDVI and temporal
data across the entire sequence.
3.3 Regression Decoder
The output from the Transformer encoder is pro-
cessed through a regression decoder to predict the
NDVI for the target year and season. This decoder
employs two key components: A MaxPooling layer
and a Dense (linear) layer. The MaxPooling layer ag-
gregates the most important features across the tem-
poral dimension, reducing the sequence to a single
vector representation. This pooled vector is then fed
into the Dense layer, which maps it to a single scalar
value representing the predicted NDVI.
4 EXPERIMENTAL RESULTS
4.1 Study Area
The study area is located in the southeastern corner
of the Mediterranean basin, along a gradient transi-
tioning from Mediterranean to arid climate zones (see
Figure 4: Study area in the southeastern Mediterranean
basin, illustrating the transition from Mediterranean to arid
climate zones, as visualized using Google Earth.
Figure 4). The rainfall varies between 450 mm/year
to 250 mm/year resulting in a transition from shrub-
lands to phrygana (Bata) to bare desert. Frequent an-
nual rainfall fluctuations, droughts, and human dis-
turbance to natural ecosystems create a mosaic of
highly-variable vegetation, soil, and rock patterns.
Temporal landscape changes are significantly in-
fluenced by fires and periods of low rainfall. As
shown in Figure 1, the NDVI time series recorded
in the study area exhibit distinctive annual and sea-
sonal fluctuations, which pose challenges to pre-
dicting future NDVI maps based on past NDVI se-
quences (Roitberg and Shoshany, 2024; Mozhaeva
and Shoshany, 2022).
We evaluated the proposed method using Landsat
images (Missions 5, 7, 8, and 9) from 1984 to 2024
over Israel. These data represent Mediterranean re-
gions with high spatial and temporal variability, char-
acterized by long dry spells and short, intense rainfalls
(Faran et al., 2020).
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series
547

The dataset spans an area of 53.94 × 37.35 km
2
,
represented by a scene of 1798 × 1245 pixels, with
a spatial resolution of 30 [m] per pixel. It was
obtained from the Google Earth Engine L2 prod-
ucts, with two seasonal composites created annu-
ally by averaging NDVI values from scenes with
less than 20% cloud cover (October–April for ”Win-
ter” and May–September for ”Summer”). The re-
sulting dataset, comprising a total of 2,238,510 pix-
els, was divided into 80% (1,790,808 samples) for
training, 10% (223,851 samples) for validation, and
10% (223,851 samples) for testing. A windowing
approach was applied to extract training sequences,
where each window consisted of N consecutive NDVI
values (e.g., N = 10 for 5 years of past data with two
seasons each), with one additional value serving as
the target timestamp to predict.
4.2 Implementation and Parameters
The model employs an embedding dimension of 256,
followed by three encoding Transformer blocks, each
with eight attention heads. A dropout rate of 0.2 was
applied after the embedding layer and each Trans-
former block. The training was conducted over 200
epochs using an initial learning rate of 1 × 10
−4
, with
a 10-epoch warm-up period followed by an exponen-
tial decay. The mean square error (MSE) or L
2
loss
served as the objective function, optimized using the
Adam optimizer. Model performance was evaluated
using MSE, Mean Absolute Error (MAE) or L
1
, and
the coefficient of determination, R
2
.
The dataset and implementation code are available
in a public repository
*
.
4.3 Time-Series Evaluation
We evaluated the proposed model’s prediction capa-
bilities, using various N and ∆ values for past ob-
servation lengths and future time horizons, respec-
tively. This also helped assess our method’s capabil-
ity of capturing time-series patterns and seasonality.
The results are presented in Figure 5. A past obser-
vation sequence of 10 years yielded the most signifi-
cant improvement in prediction accuracy, with notice-
able gains compared to shorter sequences. Beyond
10 years, further gains are less pronounced, with 15
to 20 years offering the lowest L
1
loss. The model
performs best for next-year predictions, with perfor-
mance gradually declining as the prediction horizon
increases. Separating the analysis by land-cover class
might yield different results, as some classes (e.g.,
building areas, bare ground) have static NDVI values.
*
https://github.com/FaranIdo/SST-LTP
Table 1: Comparative performance of previous methods
and our SST-LTP model for next-year prediction using 10-
year input sequences. The proposed SST-LTP model out-
performs all other methods examined.
Model L
1
(MAE) L
2
(MSE) R
2
SVM 0.0456 0.0041 0.7459
CNN-1D 0.0391 0.0035 0.7810
Fully Connected 0.0383 0.0033 0.7953
LSTM 0.0363 0.0031 0.8088
SST-LTP 0.0338 0.0027 0.8337
In contrast, other classes (e.g., grass, shrub) exhibit
more temporal variability.
Figure 6 demonstrates the model’s output using an
input sequence of 10 years, applied to a sample of 12
points. As shown, the model successfully captures the
overall trends in NDVI values over time, aligning with
the patterns observed in the input sequence. However,
it struggles to predict unexpected outliers, which may
arise from sudden events or changes in the environ-
ment. These deviations highlight the challenges of
modeling abrupt anomalies in a predominantly trend-
focused framework.
4.4 Comparison with Other Models
We benchmarked our proposed model against vari-
ous spectral time-series analysis methods, including
Support Vector Machines (SVM), Fully-Connected
Neural Networks, 1D Convolutional Neural Networks
(CNN-1D), and Long Short-Term Memory (LSTM)
networks. The SVM model was implemented with
a Radial Basis Function (RBF) kernel, a commonly
used configuration for time-series regression. The
Fully-Connected Neural Network consisted of three
layers with a hidden size of 128 neurons each and
ReLU activation, tailored to process the 10-sample
(i.e., a 5-year) input sequence. For the CNN-1D
model, we utilized three convolutional layers, each
with 64 filters and a kernel size of 3, along with
padding to preserve sequence length, followed by a
linear prediction layer. The LSTM network was de-
signed with a 3-layer stacked architecture, each with
64 hidden units, to capture hierarchical temporal de-
pendencies in the data.
The results presented in Table 1 demonstrate the
superior performance of our proposed model. A key
distinction is our model’s ability to incorporate the
target year as an input parameter, to obtain multiyear
predictions directly. In contrast, traditional methods
typically predict only the next item in the sequence,
requiring repeated inference calls for long-term pre-
dictions. This architectural advantage of our model,
which allows direct future-year predictions without
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
548
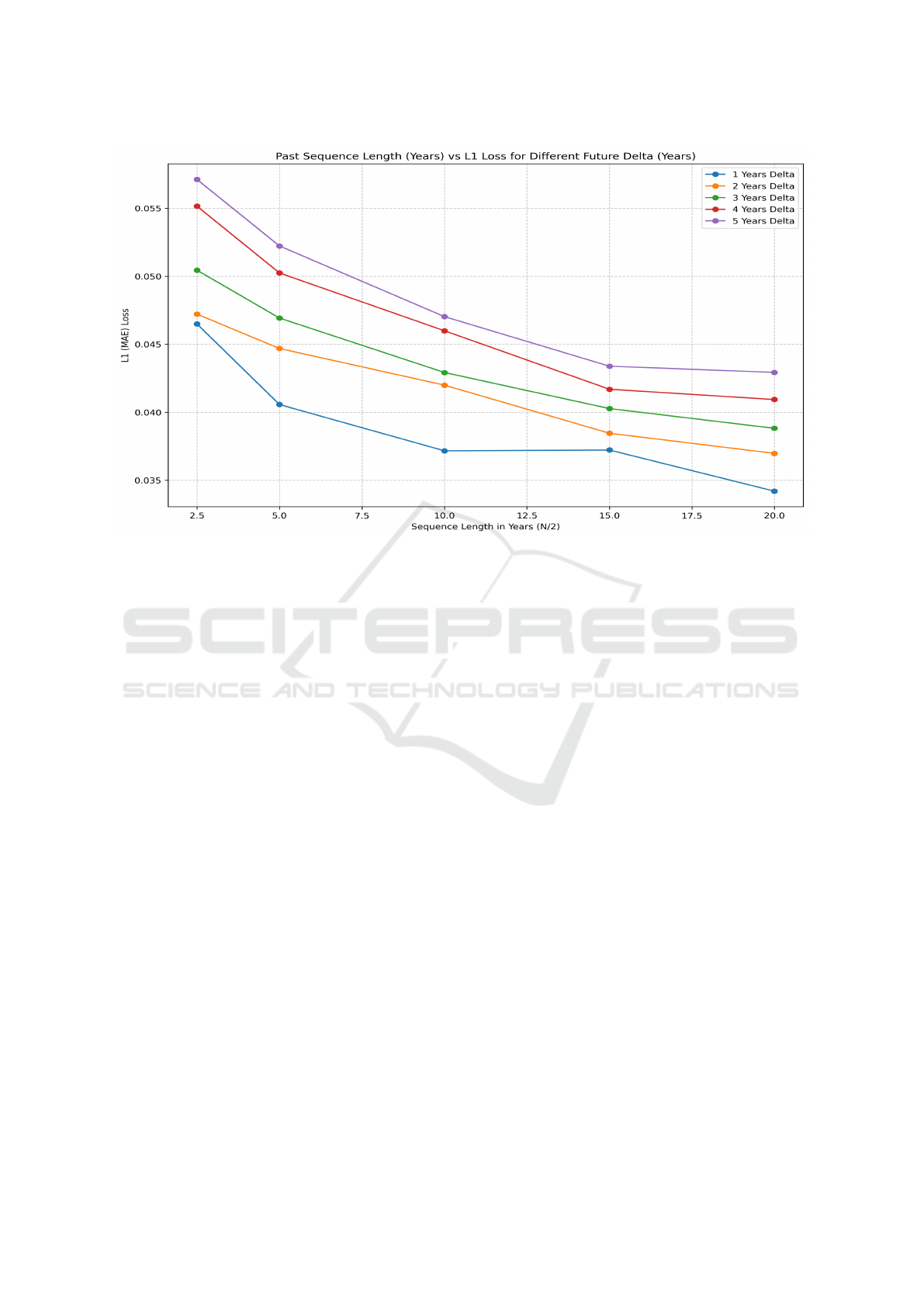
Figure 5: L
1
loss vs. past sequence length for different future prediction horizons; x-axis represents the duration of historical
data used for prediction (i.e., 2.5–20 years), and y-axis displays L
1
(MAE) loss. Each curve corresponds to a different
future prediction horizon (between 1–5 years). The graph demonstrates that longer historical sequences generally improve
prediction accuracy, with diminishing returns beyond 10 years; shorter prediction horizons yield lower L
1
loss across all
sequence lengths.
sequential inference and improved accuracy, high-
lights the efficiency and effectiveness of our approach
for long-term time-series forecasting.
Figure 7 further illustrates the comparative perfor-
mance of the different models for three representative
NDVI samples, using a 10-step (i.e., a 5-year) input
sequence. The plots show the ground truth (blue), in-
put sequences (dashed green), and predictions from
each model. Notably, the proposed SST-LTP model
consistently tracks the trends of the ground truth bet-
ter than the other methods, especially in areas with
higher variability. In contrast, the Fully-Connected
and CNN models tend to exhibit greater deviations,
particularly in regions with more complex temporal
patterns. The LSTM predictions show some align-
ment with ground truth but appear smoother, poten-
tially due to limitations in capturing fine-grained fluc-
tuations over longer horizons. These results empha-
size the ability of our proposed model to adapt to in-
tricate patterns in the data while maintaining accuracy
across different time-series samples.
5 CONCLUSION
This study introduces a novel approach for analyz-
ing long-term satellite image time series, leverag-
ing self-supervised learning, temporal embeddings,
and a Transformer-based architecture. The proposed
Self-Supervised Transformers for Long-Term Predic-
tion (SST-LTP) framework excels at modeling com-
plex temporal dynamics and seasonal variations in
Mediterranean landscapes. Experimental results us-
ing Landsat data from Mediterranean regions demon-
strate the method’s strong performance for both short-
term and long-term predictions, outperforming tradi-
tional statistical and neural network-based models.
Future research will focus on integrating spatial
correlations between adjacent pixels, adapting the
framework for change detection and time-series clas-
sification tasks, and incorporating precipitation data
to enhance the understanding of seasonal patterns.
Additionally, techniques for handling missing data
will be developed, and the model will be evaluated
across diverse land-cover types to assess its adaptabil-
ity to varying landscapes.
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series
549
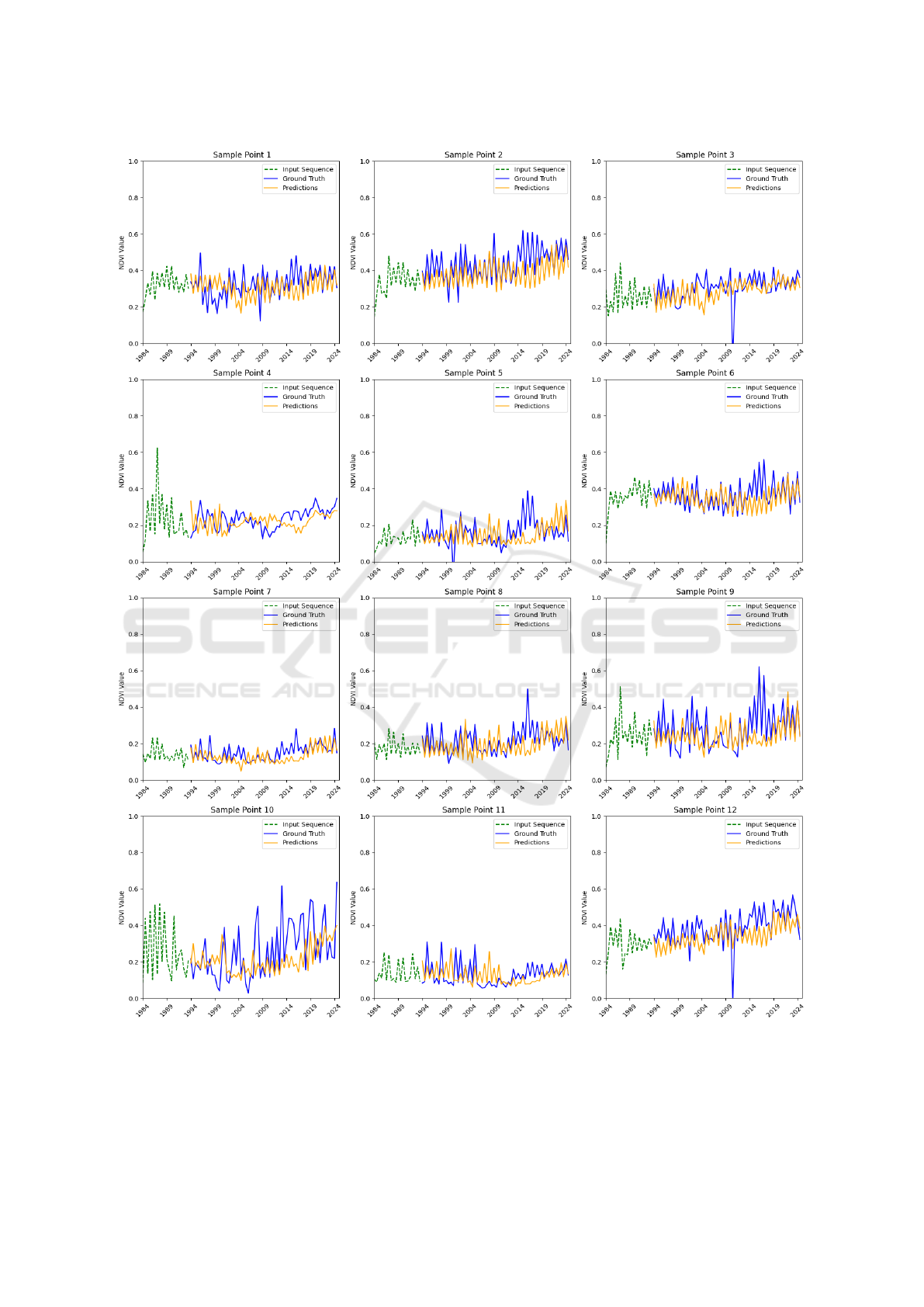
Figure 6: Demonstration of the SST-LTP model’s performance using an input sequence of 20 samples (i.e., 10 years) across
12 sample points. Each subplot compares the input sequence, ground truth, and SST-LTP model predictions, illustrating
the model’s ability to capture seasonal variability and long-term trends in NDVI values. The results highlight the SST-LTP
model’s effectiveness in accurately predicting NDVI values across diverse temporal patterns.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
550
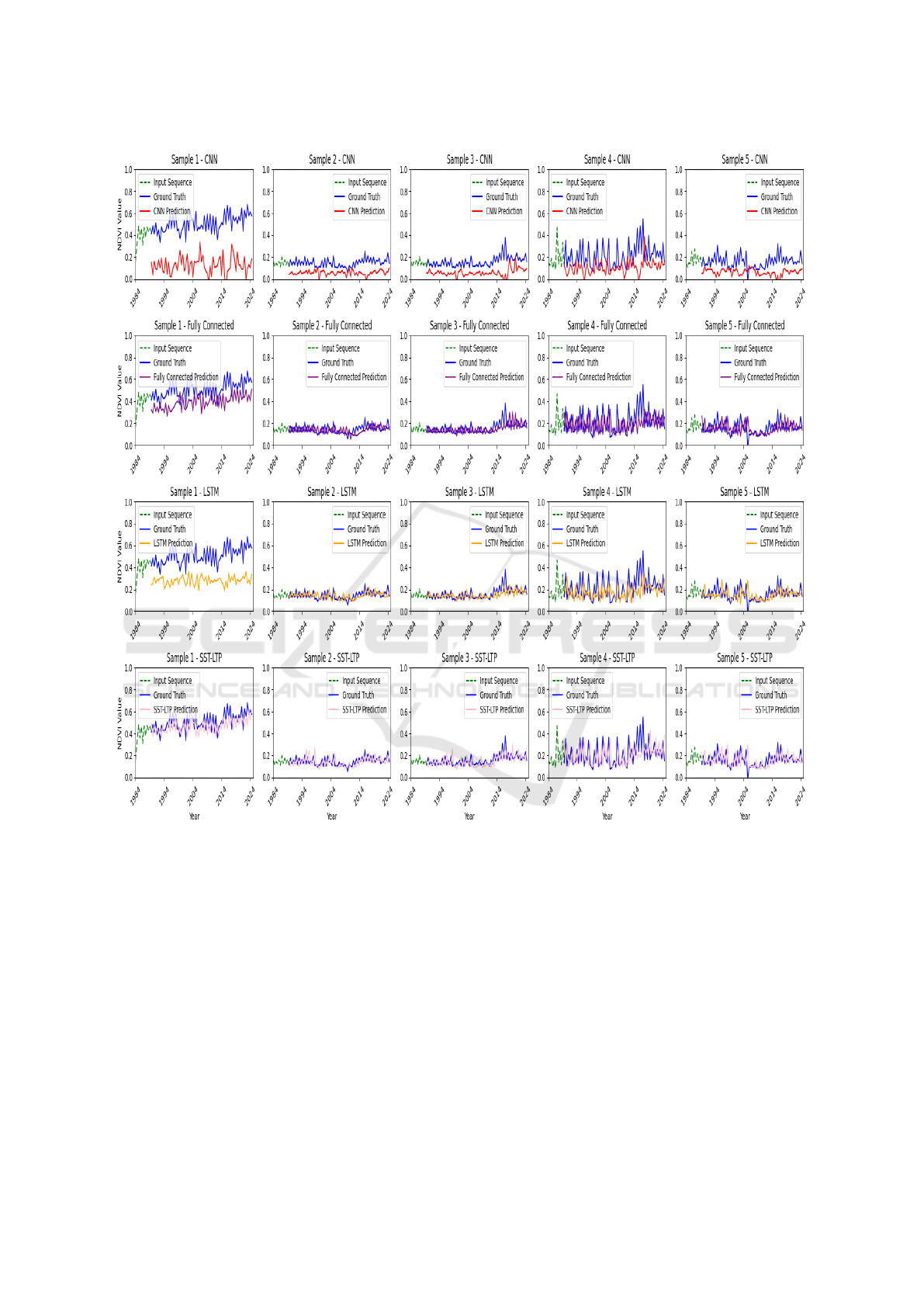
Figure 7: Performance evaluation of SST-LTP and other deep learning methods (i.e., CNN, Fully Connected, and LSTM) on
five NDVI samples for 10-step (i.e., 5-year) input sequence. Each subplot illustrates the input sequence, ground truth, and
predicted values for various models. SST-LTP predictions demonstrate improved alignment with the ground truth, highlighting
its effectiveness in capturing long-term trends and variability.
REFERENCES
Box, G. E., Jenkins, G. M., Reinsel, G. C., and Ljung, G. M.
(2015). Time Series Analysis: Forecasting and Con-
trol. John Wiley & Sons.
Devlin, J. (2018). BERT: Pre-training of deep bidi-
rectional transformers for language understanding.
arXiv:1810.04805.
Faran, I., Netanyahu, N. S., David, E., Rud, R., and
Shoshany, M. (2020). Multi seasonal deep learning
classification of VENuS images. In Proceedings of
the IEEE International Geoscience and Remote Sens-
ing Symposium, pages 6754–6757.
Gao, Z., Shi, X., Wang, H., Zhu, Y., Wang, Y. B., Li,
M., and Yeung, D.-Y. (2022). Earthformer: Explor-
ing space-time transformers for earth system forecast-
ing. In Advances in Neural Information Processing
Systems, volume 35, pages 25390–25403.
G
´
omez, C., White, J. C., and Wulder, M. A. (2016). Optical
remotely sensed time series data for land cover clas-
sification: A review. Journal of Photogrammetry and
Remote Sensing, 116:55–72.
Self-Supervised Transformers for Long-Term Prediction of Landsat NDVI Time Series
551

Kennedy, R. E., Andr
´
efou
¨
et, S., Cohen, W. B., G
´
omez, C.,
Griffiths, P., Hais, M., et al. (2018). Bringing an
ecological view of change to Landsat-based remote
sensing. Frontiers in Ecology and the Environment,
16(6):340–348.
Lim, B., Arık, S.
¨
O., Loeff, N., and Pfister, T. (2021).
Temporal fusion transformers for interpretable multi-
horizon time series forecasting. International Journal
of Forecasting, 37(4):1748–1764.
Liu, Y., Hu, T., Zhang, H., Wu, H., Wang, S., Ma,
L., and Long, M. (2023). iTransformer: Inverted
Transformers are effective for time series forecasting.
arXiv:2310.06625.
Miller, L., Pelletier, C., and Webb, G. I. (2024). Deep learn-
ing for satellite image time series analysis: A review.
arXiv:2404.03936.
Mo, F., Huang, Y., Wu, M., Zhu, X., and Zhang, C. (2025).
Mmsisp: A satellite image sequence prediction net-
work with multi-factor decoupling and multi-modal
fusion. Pattern Recognition, 221–236.
Moskola
¨
ı, W. R., Abdou, W., Dipanda, A., and Kolyang
(2021). Application of deep learning architectures for
satellite image time series prediction: A review. Re-
mote Sensing, 13(23):4822.
Mozhaeva, S. and Shoshany, M. (2022). Relationships
between vegetation indices and rainfall and PET at
different time-lags: A study at a Mediterranean to
arid gradient. The International Archives of the Pho-
togrammetry, Remote Sensing and Spatial Informa-
tion Sciences, 43:939–944.
Roitberg, E. and Shoshany, M. (2024). Primary productiv-
ity and woody growth: a 35 years Landsat TM NDVI
time series investigation across desert-fringe in the
south-eastern Mediterranean. In Proceedings of the
IEEE International Geoscience and Remote Sensing
Symposium, pages 2867–2870.
Ruiz-Aguilar, J., Turias, I., and Jim
´
enez-Come, M. (2014).
Hybrid approaches based on sarima and artificial neu-
ral networks for inspection time series forecasting.
Transportation Research Part E: Logistics and Trans-
portation Review, 67:1–13.
Rußwurm, M. and K
¨
orner, M. (2018). Self-attention for raw
optical satellite time series classification. Journal of
Photogrammetry and Remote Sensing, 169:421–435.
Sun, X., Wang, P., Lu, W., Zhu, Z., Lu, X., He, Q., Li,
J., Rong, X., Yang, Z., Chang, H., He, Q., Yang, G.,
Wang, R., Lu, J., and Fu, K. (2022). RingMo: A re-
mote sensing foundation model with masked image
modeling. IEEE Transactions on Geoscience and Re-
mote Sensing, 60:1–15.
Taylor, S. J. and Letham, B. (2018). Forecasting at scale.
The American Statistician, 72(1):37–45.
Tseng, G., Cartuyvels, R., Zvonkov, I., Purohit, M., Rol-
nick, D., and Kerner, H. (2023). Lightweight, pre-
trained transformers for remote sensing timeseries.
arXiv:2304.14065.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Keiser, L., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems, pages 6000–
6010.
Verma, N. K., Bansal, A., and Singh, S. (2013). Gener-
ation of future image frames for an image sequence.
In International Conference on Intelligent Interac-
tive Technologies and Multimedia, pages 154–162.
Springer.
Yan, B., Mu, R., Guo, J., Liu, Y., Tang, J., and Wang, H.
(2022). Flood risk analysis of reservoirs based on full-
series arima model under climate change. Journal of
Hydrology, 610:127979.
Yao, F., Lu, W., Yang, H., Xu, L., Liu, C., Hu, L., Yu, H.,
Liu, N., Deng, C., Tang, D., Chen, C., Yu, J., Sun, X.,
and Fu, K. (2023). RingMo-Sense: Remote sensing
foundation model for spatiotemporal prediction via
spatiotemporal evolution disentangling. IEEE Trans-
actions on Geoscience and Remote Sensing, 61:1–21.
Yuan, Y. and Lin, L. (2020). Self-supervised pretraining of
transformers for satellite image time series classifica-
tion. IEEE Journal of Selected Topics in Applied Earth
Observations and Remote Sensing, 14:474–487.
Zhang, Y. and Yan, J. (2023). Crossformer: Transformer
utilizing cross-dimension dependency for multivari-
ate time series forecasting. In Proceedings of the
Eleventh International Conference on Learning Rep-
resentations.
Zhou, H., Zhang, S., Peng, J., Zhang, S., Li, J., Xiong, H.,
and Zhang, W. (2021). Informer: Beyond efficient
transformer for long sequence time-series forecasting.
In Proceedings of the AAAI Conference on Artificial
Intelligence, volume 35, pages 11106–11115.
Zhu, Z. (2017). Change detection using landsat time series:
A review of frequencies, preprocessing, algorithms,
and applications. Journal of Photogrammetry and Re-
mote Sensing, 130:370–384.
Zhu, Z., Zhang, J., Yang, Z., Aljaddani, A. H., Cohen,
W. B., Qiu, S., and Zhou, C. (2019). Continuous mon-
itoring of land disturbance based on Landsat time se-
ries. Remote Sensing of Environment, 238:111116.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
552
