
HI
2
: Sparse-View 3D Object Reconstruction with a Hybrid Implicit
Initialization
Pragati Jaiswal
1,2
and Didier Stricker
1,2
1
RPTU - Technische Universit
¨
at Kaiserslautern, Germany
2
DFKI – German Research Center for Artificial Intelligence, Germany
Keywords:
Object Reconstruction, 3D Reconstruction, Hybrid Implicit Initialization.
Abstract:
Accurate 3D object reconstruction is essential for various applications, including mixed reality and medicine.
Recent advancements in deep learning-based methods and implicit 3D modelling have significantly enhanced
the accuracy of 3D object reconstruction. Traditional methods enable reconstruction from a limited number
of images, while implicit 3D modelling is proficient at capturing fine details and complex topologies. In this
paper, we present a novel pipeline for 3D object reconstruction that combines the strengths of both approaches.
Firstly, we use a 3D occupancy grid to generate a coarse 3D object from a few images. Secondly, we implement
a novel and effective sampling strategy to transform the coarse reconstruction into an implicit representation,
which is optimized to reduce computation power and training time. This sampling strategy also allows it
to be true to scale given actual camera intrinsic and extrinsic parameters. Finally, we refine the implicit
representation and extract the 3D object mesh under a differentiable rendering scheme. Experiments on several
datasets demonstrate that our proposed approach can reconstruct accurate 3D objects and outperforms state-
of-the-art methods in terms of the Chamfer distance and Peak Signal-to-Noise Ratio metrics.
1 INTRODUCTION
The topic of 3D object reconstruction has received in-
creased attention due to the recent emergence of many
neural implicit representations. The ability to easily
reconstruct even photorealistic 3D objects is of sig-
nificant interest for a wide field of applications. This
is especially the case in the field of virtual and aug-
mented reality. However, not all of these methods
produce an output that is compatible with standard
rendering engines. Some representations like neu-
ral radiance fields (Mildenhall et al., 2021) and voxel
grids (Fridovich-Keil et al., 2022) require a volume
rendering approach that can be very costly. In those
cases, it might not be possible to achieve real-time
rendering unless a mesh is extracted in a separate step.
Converting these representations in a separate step is,
however, computationally expensive and can reduce
the quality of the original reconstruction. Methods
that directly output a mesh are, therefore, preferable
as they do not require additional computations and re-
tain their level of quality.
In this work, we aim to reconstruct high-fidelity
3D models of objects using only a sparse set of im-
ages. The implicit modelling is suitable for capturing
Figure 1: We propose HI
2
, a novel Hybrid Implicit Initial-
ization. Given sparse views, we aim to reconstruct a highly
accurate mesh of the object. In this figure, we show input
images and our 3D object reconstruction. It is clearly no-
ticeable that our reconstruction pipeline can maintain high-
frequency details.
high-frequency details. Meanwhile, a coarse mesh
makes the reconstruction from a few images possi-
ble. Motivated by this, we propose a novel 3D object
reconstruction pipeline HI
2
, combining the strengths
of implicit modelling and explicit coarse mesh recon-
struction. For this, we use a novel approach to create
a coarse reconstruction of the object from as few as
170
Jaiswal, P. and Stricker, D.
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization.
DOI: 10.5220/0013382000003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 170-180
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

five images.
We then optimize this initial mesh using implicit
modelling via a neural rendering-based optimization
process. We propose a novel shell-constrained sam-
pling strategy to transfer the coarse reconstruction
into an implicit representation. Thanks to this shell,
we are able to sample only from the area close to the
object’s surface instead of sampling from all points
in the unit cube, as most approaches do (Park et al.,
2019; Tretschk et al., 2020). Using the sampled
Signed Distance Function (SDF) values, we initialize
a differentiable tetrahedral grid (Shen et al., 2021).
By combining the differentiable implicit representa-
tion with texture and lightning modelling (Munkberg
et al., 2022), we optimize the tetrahedral grid w.r.t.
the photometric reprojection error. Finally, we di-
rectly extract the object surface from the tetrahedral
grid without the expensive computational overhead.
We successfully lifted the implicit modelling to a 3D
reconstruction from sparse views using our pipeline.
We can summarize our main contributions as fol-
lows:
• We introduce an approach that combines clas-
sic 3D occupancy mapping and implicit 3D mod-
elling for 3D object reconstruction.
• We propose a novel shell-constrained sampling
strategy which helps in reducing the required
computational power and training time. In addi-
tion, it helps in generating a high-quality mesh
even with a limited number of images.
Extensive experiments demonstrate that our pipeline
can reconstruct a full 3D object with rich details using
only a few images. We also show that we outperform
State-Of-The-Art (SOTA) implicit 3D modelling ap-
proaches w.r.t. the Chamfer distance metric and Peak
Signal-to-Noise Ratio (PSNR) under different num-
bers of views.
2 RELATED WORK
2.1 Classical Methods
Multi-View Stereo (MVS) is a fundamental prob-
lem in 3D computer vision and has been exten-
sively researched. The classic approaches usually es-
timate the depth map through matching correspon-
dences across images (Pons et al., 2005; Kolmogorov
and Zabih, 2002; Goesele et al., 2006). However,
the matching quality heavily depends on the degree
of overlap in the neighbourhood images, which re-
quires a large number of views. Although such ap-
proaches have achieved a promising reconstruction
quality (Furukawa and Ponce, 2009; Galliani et al.,
2016; Sch
¨
onberger et al., 2016), the dense match-
ing and the post-processing step for mesh genera-
tion (Kazhdan et al., 2006) are computationally ex-
pensive.
2.2 Explicit Representations
With the development of deep learning, MVS can eas-
ily become more feasible by implementing learning-
based components for the subtasks, such as feature
matching (Hartmann et al., 2017; Luo et al., 2019)
and depth fusion (Donne and Geiger, 2019; Riegler
et al., 2017). Furthermore, end-to-end deep learning
approaches are also proposed to directly reconstruct
objects from input images. A research branch recon-
structs the object in voxel-grids (Choy et al., 2016;
Kar et al., 2017; Yan et al., 2016). However, the
voxel-grid size grows cubically to maintain fine de-
tails in the reconstruction. Moreover, the voxel rep-
resentation is incompatible with the standard render-
ing pipeline, limiting their applications in graphics.
Presenting object shapes as a mesh in the reconstruc-
tion is more memory efficient. Nevertheless, most ap-
proaches assume a fixed mesh topology (Wang et al.,
2018; Liu et al., 2019a; Kanazawa et al., 2018), which
makes those approaches only suitable for reconstruct-
ing objects with similar geometries.
2.3 Implicit Representations
A more memory-efficient way is to represent the
object surface as neural implicit representations,
which can theoretically express the object surface
in an infinite resolution with a fixed memory de-
mand. SDF (Park et al., 2019) and occupancy
functions (Mescheder et al., 2019) are commonly
used as neural implicit representations. In multi-
view 3D reconstruction, neural implicit representa-
tions are mostly used jointly with differentiable ren-
dering (Jiang et al., 2020; Liu et al., 2020; Liu et al.,
2019b) to extract the surface point of each view.
Implicit Differentiable Renderer (IDR) (Yariv et al.,
2020) further combines the implicit representation
with the apprentice model that can differentiably ren-
der object views accounting for light effects. Thanks
to the differentiable modelling of object geometry and
appearance, IDR is able to reconstruct high-quality
object surfaces under 2D supervision only. How-
ever, IDR still relies on the computationally expen-
sive Marching Cubes algorithm (Lorensen and Cline,
1987) to extract the reconstructed object surface.
Instead, Deep Marching Tetrahedra (DMTet) (Shen
et al., 2021) proposes a novel 3D representation to re-
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization
171

Figure 2: Hybrid Implicit Initialization (HI
2
). Our initialization approach starts from a sparse set of images to reconstruct a
coarse mesh using a 3D occupancy map. A shell is then constructed around the coarse mesh, which is filled with a tetrahedral
grid. Additionally, a Signed Distance Function (SDF) is created using the tetrahedral grid and coarse mesh.
construct the shape by a differentiable marching tetra-
hedra layer while keeping a fast inference rate. Nvd-
iffrec (Munkberg et al., 2022) implements a recon-
struction pipeline upon DMTet with additional mate-
rials and lighting modelling, which takes a step fur-
ther towards high-fidelity 3D reconstruction from im-
ages. Neural volumes can also be seen as a 3D ob-
ject representation. With volumetric rendering, Neu-
ral Radiance Fields (NeRF) (Mildenhall et al., 2021)
and its follow-up work (Garbin et al., 2021; Martin-
Brualla et al., 2021; Pumarola et al., 2021; Reiser
et al., 2021; Wang et al., 2021; Wizadwongsa et al.,
2021; Yu et al., 2021; Zhang et al., 2020; Kellnhofer
et al., 2021) have shown great success in the area of
novel view synthesis. However, they are mainly fo-
cused on the optimization of object appearance. The
ambiguity in the volumetric rendering limits the su-
pervision of the object geometry (Zhang et al., 2020).
Although one can also extract object surfaces from
such methods, the reconstructed geometry is usually
not satisfiable.
Our approach builds on the advances of DMTet
and Nvdiffrec through a clever hybrid initialization
that takes advantage of explicit and implicit represen-
tations.
3 METHOD
We present a method for 3D object reconstruction that
utilizes a sparse set of images of an arbitrary object.
Starting with a minimum of five input images, accom-
panied by masks and camera parameters, we gener-
ate a 3D occupancy map of the object. This occu-
pancy map serves as the foundation for reconstructing
a coarse mesh, which forms the initial structure of our
method.
Next, we refine the reconstruction by creating a
shell around the coarse mesh and filling it with a
tetrahedral grid. Unlike arbitrary shapes, the shell-
constrained tetrahedral grid closely approximates the
object’s structure, providing a more accurate starting
point for further optimization.
The tetrahedral mesh is initialized with SDF val-
ues derived from the coarse mesh. Using this ini-
tialized mesh, we employ the Nvdiffrec’s DMTet
pipeline to optimize the reconstruction. During each
optimization iteration, the tetrahedral mesh is differ-
entiably rendered, allowing us to compute the loss be-
tween the rendered image and the ground truth inputs.
3.1 Initialization Approach
In the following, we detail the steps of our initializa-
tion approach, summarized in Figure 2.
3.1.1 Coarse Mesh
Given a set of posed colour images I = {I
1
, I
2
, . . . , I
N
}
with corresponding binary object masks M =
{M
1
, M
2
, . . . , M
N
} and known camera parameters C =
{C
1
, C
2
, . . . , C
N
}, we estimate a coarse occupancy
map of the object using a space carving algorithm
(Kutulakos and Seitz, 2000).
A set of random 3D points P = {p
1
, p
2
, . . . , p
K
},
where p
i
= (x
i
, y
i
, z
i
), is generated within the 3D space
enclosing the object. Each point is projected onto the
2D image plane of every view n ∈ [1, N] using the
camera projection function P
n
, defined as:
u, v = P
n
(p
i
, C
n
) =
f
x
x
i
z
i
+ c
x
,
f
y
y
i
z
i
+ c
y
, (1)
where f
x
, f
y
are the focal lengths, and c
x
, c
y
are the
principal points.
For each projected point, we check if its projection
(u, v) lies within the object mask M
n
(u, v):
o
n
(p
i
) =
(
1 if M
n
(u, v) = 1,
0 otherwise.
(2)
The object’s final occupancy score is determined by
aggregating o
n
(p
i
) across all views:
O(p
i
) =
1
N
N
∑
n=1
o
n
(p
i
) (3)
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
172
Points with O(p
i
) ≥ τ, where τ is a threshold (e.g.,
τ = 0.5), are retained as part of the object’s visual hull.
An alpha shape A
α
is computed from the retained
points, representing the coarse mesh. The alpha shape
is defined as the smallest triangulation enclosing the
points such that all edges have a length ≤ α. The
choice of α is influenced by the approximate spac-
ing between the points d
mean
, which depends on the
density of the initialized point cloud.
α ≈ c · d
mean
(4)
where c is a scaling factor typically in range 1.5 ≤
c ≤ 3, depending on desired granularity. This shape
approximates the object’s geometry and provides a
coarse mesh for subsequent steps.
3.1.2 Tetrahedral Mesh
Using the coarse mesh A
α
, we generate a tetrahedral
mesh T using the Quartet framework (Bridson and
Doran, 2014). Quartet employs an isosurface stuff-
ing algorithm (Shewchuk, 1998), which generates a
tetrahedral grid from a defined boundary.
Instead of generating a tetrahedral grid within a
unit cube, we focus mesh generation on the near-
surface regions of the coarse mesh.
A conforming shell S
δ
with thickness δ is con-
structed around A
α
:
S
δ
= {q | q ∈ R
3
, d(q, A
α
) ≤
δ
2
}, (5)
where d(q, A
α
) is the Euclidean distance from q to
the nearest point on A
α
.
The shell S
δ
serves as the input boundary for the
Quartet framework, ensuring that the tetrahedral mesh
T aligns closely with the object’s surface geometry.
3.1.3 Signed Distance Function (SDF)
To improve convergence and guide optimization, we
initialize the tetrahedral mesh with SDF values de-
rived from the coarse mesh.
For each vertex v
i
∈ T , the SDF value is computed
as:
SDF(v
i
) = sgn(v
i
) · min
p∈A
α
∥v
i
− p∥
2
, (6)
where sgn(v
i
) = −1 if v
i
is inside the coarse mesh and
+1 otherwise.
The computed SDF values initialize the tetrahe-
dral grid, encoding proximity to the object’s surface.
This initialization provides:
• Improved Geometry Awareness: The optimiza-
tion starts with a spatially informed structure.
• Faster Convergence: A better initial configura-
tion reduces the number of iterations required for
optimization.
By combining these mathematically grounded
steps, our initialization approach achieves robust and
efficient 3D object reconstruction, even with sparse
input data. The method ensures high fidelity while
maintaining computational efficiency.
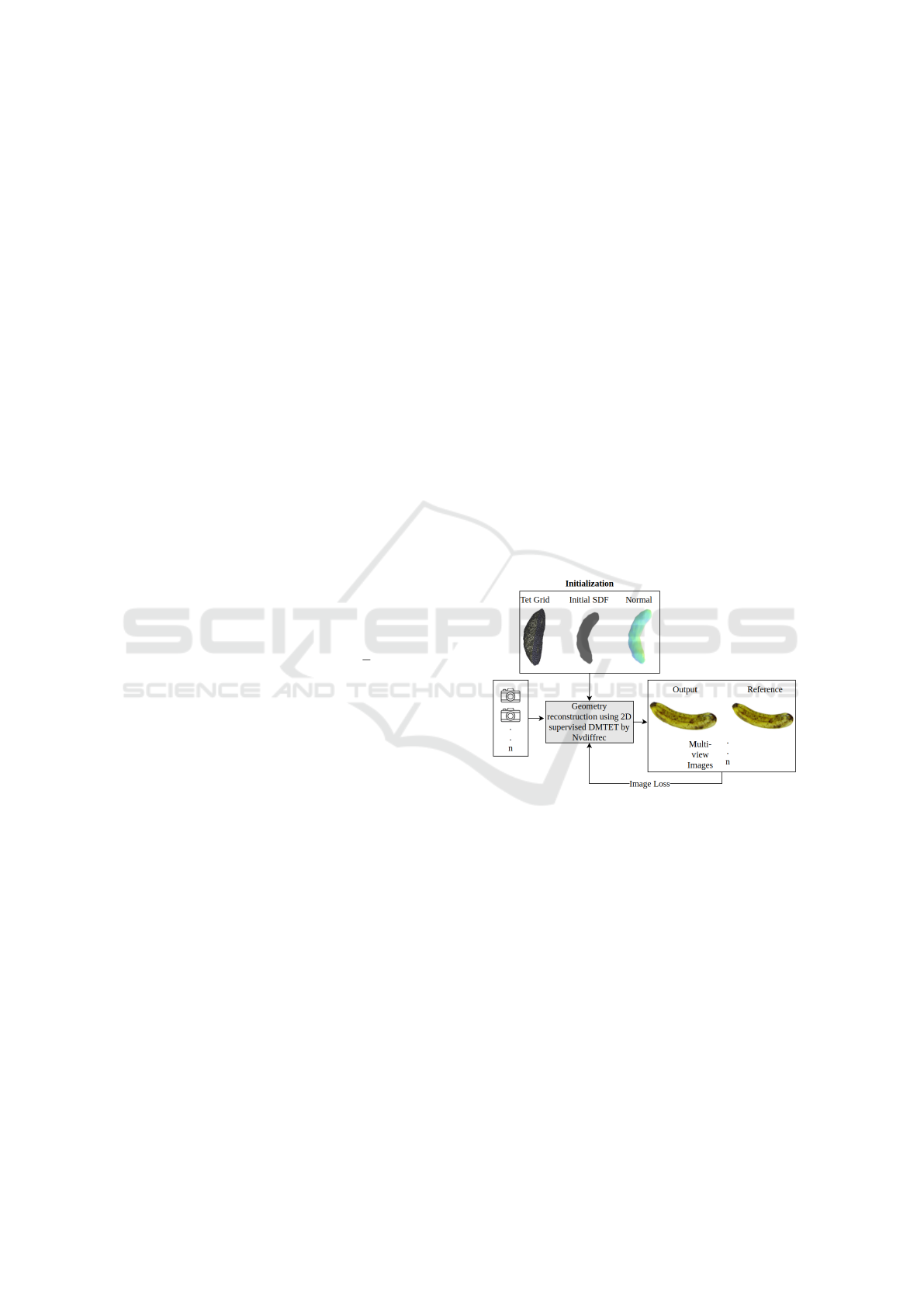
3.2 3D Reconstruction
The next stage focuses on refining and optimizing
the mesh geometry to align with the input images,
thereby improving the overall representation of the
reconstructed object. A visualization of this recon-
struction pipeline is provided in Figure. 3.
To achieve this, we utilize the DMTet framework,
integrated with 2D supervision from Nvdiffrec. This
integration enables efficient optimization of the mesh
geometry. Unlike other approaches such as IDR,
which treat geometry and material properties as sep-
arate components, Nvdiffrec jointly optimizes geom-
etry, materials, and lighting. This simultaneous opti-
mization enhances the alignment between the recon-
structed shape and the image data, leading to a more
robust reconstruction process.
Figure 3: Reconstruction pipeline with HI
2
: Multiview im-
ages and their corresponding camera parameters serve as
input. Our initialization approach is used to enhance the
DMTet framework, supervised by Nvdiffrec, for improved
3D object reconstruction.
3.2.1 Optimization Process
During each iteration of the optimization, the march-
ing tetrahedral layer is converted into a surface mesh
representation. This surface mesh is rendered using
a differentiable rasterizer, utilizing the provided cam-
era parameters and viewpoints. The rendered output
is compared against the ground truth image data to
compute a loss function in the image space. This loss
is backpropagated through the optimization pipeline,
enabling updates to the surface mesh embedded in the
implicit field.
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization
173

The iterative refinement involves two key compo-
nents:
• Vertex Adjustments: The positions of vertices
within the tetrahedral grid are updated to improve
the alignment of the mesh with the object’s true
geometry.
• SDF Updates: The SDF values associated with
the tetrahedral mesh are also refined, ensuring the
implicit representation more accurately encodes
the object’s shape.
By integrating our SDF-derived initialization, the
DMTet framework begins optimization from a well-
informed starting point. This initialization incorpo-
rates spatial information about the object’s geometry,
leading to faster convergence and improved accuracy.
The SDF initialization reduces the dependency on ex-
tensive input data, allowing our method to produce
high-quality 3D reconstructions with a sparse set of
input images.
This combination of SDF-based initialization and
joint optimization of geometry, materials, and lighting
ensures the reconstructed 3D mesh achieves a high
level of fidelity, even in scenarios with limited input.
4 EXPERIMENTS
4.1 Dataset
To evaluate the performance and versatility of our
proposed method, we utilized the OmniObject3D
(Wu et al., 2023) dataset and a synthetic face dataset
created specifically for this study. These datasets
were chosen to ensure a robust assessment across a
diverse range of object types, including both general
and highly specialized geometries.
4.1.1 OmniObject3D
The OmniObject3D dataset provides an extensive col-
lection of object categories with varying shapes and
complexities. It serves as a benchmark for testing our
method’s capability to reconstruct a wide variety of
objects, from simple to highly intricate geometries.
By leveraging this dataset, we validate the robustness
and generalizability of our approach across general
object types.
4.1.2 Synthetic Face Dataset
To further demonstrate the flexibility of our method,
particularly for objects with intricate geometry, we
developed a synthetic face dataset. This dataset was
(a) Starting Position (b) Ending Position
Figure 4: Visualization of the camera arc: (a) Starting po-
sition of the camera; (b) Ending position of the camera,
demonstrating the range used in the experiments.
created by rendering 3D models using CharacterCre-
ator4 (Inc., 2022) in Blender (Community, 2018). The
dataset includes three distinct 3D models:
• One female model.
• Two male models, one with hair and the other
bald, to evaluate the reconstruction performance
across different head geometries, including varia-
tions with long, short, or no hair.
To increase the difficulty and simulate diverse
viewing conditions, we rendered images along a cam-
era arc spanning −90
◦
to +90
◦
. Figure 4 shows the
starting and ending position of the camera’s arc. All
images were generated under consistent lighting and
rendering settings to maintain controlled experimen-
tal conditions.
4.2 Evaluation Setup
By combining the OmniObject3D dataset with the
synthetic face dataset, we comprehensively evaluate
our method’s ability to handle diverse object cate-
gories and geometries. OmniObject3D ensures the
general applicability of the method, while the syn-
thetic face dataset tests its robustness on highly de-
tailed and geometrically complex objects such as hu-
man faces.
We maintained consistent evaluation parameters
for all methods we tested. The resultant 3D mesh is
aligned with the ground truth mesh using landmarks
and then fine-tuned using Trimesh (Dawson-Haggerty
et al., ) implementation of the Iterative Closest Point
(ICP) (Besl and McKay, 1992). Our comparison of
results against other methods was done by using uni-
directional Chamfer distance.
Our evaluation involved comparing the 3D mesh
predictions from Nvdiffrec and IDR trained on the
same dataset across different views. For the Om-
niObject3D dataset, we had a full dataset (100 im-
ages) as well as randomly chosen subsets contain-
ing 20, 10, and 5 images. To ensure a fair compari-
son, the same subsets were used for evaluating each
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
174
method. We used 19, 13, 9, and 5 images for the
face dataset. This comprehensive comparison allowed
us to understand how the performance of Nvdiffrec,
IDR and our method trained on identical datasets,
varied under different training datasets and number
of views. Additionally, we conducted a comparative
analysis between the outcomes produced by Nvdiffrec
and our initialization strategy. This comparison aimed
to assess the convergence of the two methods. We
achieved this by contrasting the Peak Signal-to-Noise
Ratio (PSNR) and the Mean Squared Loss (MSE) cal-
culated between the input image and the rendered im-
age at different numbers of training epochs. This eval-
uation allowed us to gauge the effectiveness of our
initialization approach in relation to Nvdiffrec’s per-
formance.
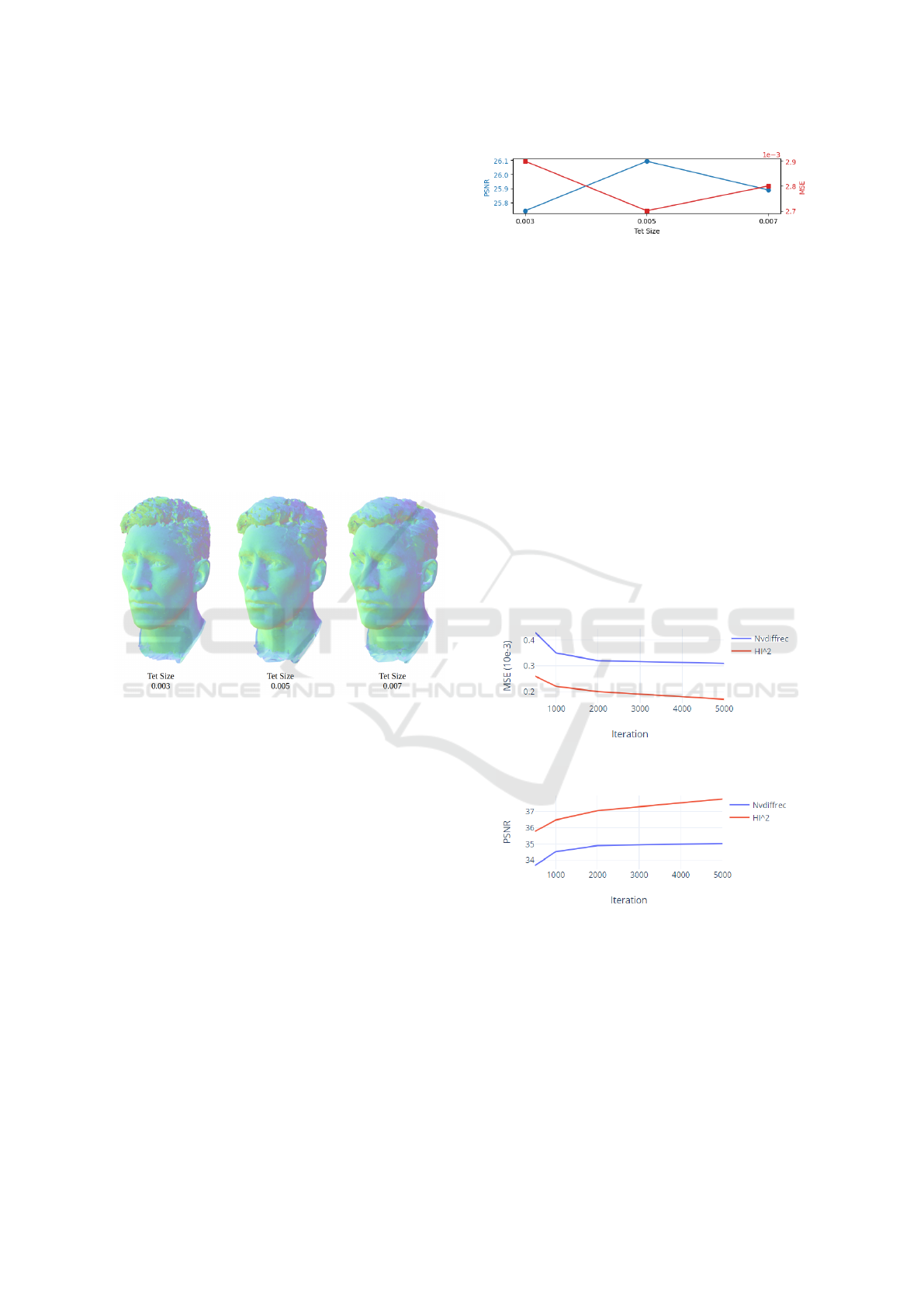
4.3 Ablation Study
Figure 5: Visual comparison of 3D reconstructions with dif-
ferent tet sizes. As the tet size increases, the level of detail
in the reconstructed surface changes, with a finer tet size
(0.003) capturing sharper geometric details, while a larger
tet size (0.007) results in smoother reconstructions.
We perform an ablation study on the size of tets used
for filling the shell created. We start by filling the shell
with a tet size of 0.007, 0.005, and 0.003 respectively.
We observe that the smaller the size of the tet grid
used for the generation, the higher the high-frequency
detail which can be observed in Figure 5, especially if
we look closer at the eye region and hair.
However, we also note that smaller tet sizes result
in noisier and less smooth surfaces in the 3D model,
potentially detracting from the overall realism. Con-
versely, while larger tet sizes, such as 0.007, produce
smoother surfaces, they lack the finer detail captured
by smaller tet sizes.
The results as visualized in Figure 6, further sup-
port this observation. At a tet size of 0.005, we ob-
serve an optimal balance between PSNR and MSE,
indicating that it achieves a good trade-off between
capturing sufficient detail and maintaining surface
Figure 6: Effect of tet size on PSNR and MSE. The blue
curve represents PSNR values (left axis), and the red curve
represents MSE values (right axis).
smoothness. This balance makes 0.005 an ideal
choice for maintaining both visual quality and real-
ism in the reconstructed model.
4.4 Quantitative Results
4.4.1 HI
2
vs Nvdiffrec
In Figure 7, it is evident that HI
2
achieves conver-
gence with only a few training iterations. This is in-
dicated not only by the better PSNR and MSE val-
ues but also by the clear convergence in the graph.
The number of training iterations required is directly
related to the training time, and the proposed re-
construction pipeline requires less training time than
Nvdiffrec with the standard random tet grid initializa-
tion for 3D object reconstruction.
(a) MSE ↓ vs No. of iterations
(b) PSNR ↑ vs No. of iterations
Figure 7: Comparison between Nvdiffrec with standard ran-
dom tet grid initialization and HI
2
. HI
2
converges better
than Nvdiffrec with standard random tet grid initialization.
4.4.2 HI
2
vs All
We compare HI
2
against Nvdiffrec and IDR across
diverse 3D object reconstruction tasks. Table 1
shows that HI
2
consistently outperforms all methods
in terms of Chamfer distance across different datasets
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization
175

Table 1: Chamfer distance ↓ comparison for OmniObject3D and face datasets across various number of views. The bolded
values indicate the best performance for each dataset and view count combination.
Anise Banana Face-1 Face-2 Face-3
Views 5 10 20 100 5 10 20 100 5 9 13 19 5 9 13 19 5 9 13 19
Nvdiffrec 0.019 0.016 0.015 0.014 0.018 0.014 0.014 0.014 0.011 0.009 0.009 0.009 0.012 0.011 0.012 0.011 0.012 0.011 0.011 0.011
IDR 0.022 0.013 0.009 0.005 0.006 0.005 0.006 0.004 0.025 0.025 0.024 0.024 0.042 0.029 0.026 0.030 0.029 0.029 0.029 0.029
HI
2
0.008 0.006 0.005 0.004 0.005 0.004 0.004 0.001 0.008 0.008 0.008 0.008 0.010 0.010 0.010 0.010 0.010 0.010 0.010 0.010
Views 5 9 13 19
Nvdiffrec
HI
2
Figure 8: Convergence of 3D reconstruction in 100 iterations with different numbers of views, using Nvdiffrec vs. HI
2
.
and numbers of input views.
HI
2
achieves the lowest Chamfer distance across
all object categories, with smaller values indicating
better performance. Notably, it excels with sparse
input (e.g., 5 views), delivering significantly lower
Chamfer distances than IDR and Nvdiffrec, demon-
strating its efficiency when there is limited data avail-
able.
4.5 Qualitative Results
4.5.1 HI
2
vs Nvdiffrec
Figure 8 and Figure 9 present a visual comparison of
the convergence and accuracy of 3D reconstruction
using different numbers of views with the Nvdiffrec
and HI
2
methods. Figure 8 shows the progression
of reconstruction over 100 iterations, comparing the
output, reference, and normal. While the quality of
Nvdiffrec improves with more views, HI
2
achieves a
high level of detail and accuracy, even with few views.
This demonstrates that HI
2
can achieve reliable re-
constructions, outperforming Nvdiffrec in terms of
convergence and model accuracy, particularly when
fewer views are available. Figure 9 further illustrates
this comparison by showing the reconstructed models
alongside the ground truth. The green and red circles
highlight areas showing that HI
2
produces higher de-
tail and can achieve this with limited views. Together,
these figures emphasize the robustness of HI
2
in gen-
erating accurate 3D reconstructions with limited input
views.
4.5.2 HI
2
vs All
Figure 10 provides a visual representation of the re-
construction quality achieved by Nvdiffrec, IDR, and
HI
2
, along with their corresponding Chamfer distance
values. The comparison clearly highlights the supe-
rior performance of HI
2
, as it consistently achieves
lower Chamfer distance values across varying num-
bers of input views. While both Nvdiffrec and IDR
show improvement as the number of views increases,
HI
2
maintains high reconstruction quality even with
minimal input views. This demonstrates the robust-
ness and scalability of HI
2
in handling diverse 3D re-
construction scenarios, particularly when input views
are limited. Furthermore, HI
2
exhibits better struc-
tural preservation and detail fidelity, outperforming
the competing methods across all tested configura-
tions.
Figure 11 further supports this observation
by showcasing the reconstructed models for each
method, colour-coded based on Chamfer distance.
The visual comparison clearly shows that HI
2
pro-
duces the highest quality reconstructions, with signif-
icantly lower Chamfer distance values and fewer arti-
facts compared to Nvdiffrec and IDR. Notably, when
the number of input views is minimal, HI
2
main-
tains superior accuracy and detail preservation, out-
performing the other methods. These results demon-
strate that HI
2
delivers cleaner and more precise re-
constructions, making it highly effective for real-
world scenarios with sparse data.
5 CONCLUSION
In this work, we propose a novel pipeline that en-
ables highly accurate 3D object reconstruction from
a sparse set of images. We introduce a novel shell-
sampling strategy that transforms the coarse recon-
struction into an implicit representation, allowing
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
176
Figure 9: Visual comparison of 3D reconstructions using HI
2
and Nvdiffrec with varying numbers of views. The reconstructed
models are shown alongside the ground truth, with green and red circles indicating areas of high accuracy and noticeable
discrepancies, respectively. HI
2
consistently preserves fine details and maintains high accuracy, even with few views.
Figure 10: Qualitative comparison of 3D mesh reconstructions and Chamfer distance across different numbers of views (5,
10, 20, and 100) for OmniObject3D dataset. Results demonstrate that HI
2
achieves more accurate reconstructions compared
to Nvdiffrec and IDR especially when limited views are available (5 or 10 images).
for further optimization by neural implicit render-
ing. Through our experiments, we demonstrate the
effectiveness of our sampling strategy, which consis-
tently outperforms state-of-the-art 3D reconstruction
approaches across different multi-view setups. We
believe our approach is not limited to only the Nvd-
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization
177

Figure 11: Qualitative comparison of Chamfer distance across different numbers of views (5, 9, 13, and 19) for face dataset.
We can clearly see that for 5 images, Nvdiffrec did not converge, while HI
2
produced highly accurate results, outperforming
both Nvdiffrec and IDR.
iffrec pipeline but can also be integrated into other
methods. Looking ahead, we aim to further improve
our pipeline to enable accurate 3D reconstruction with
even fewer input images and integrate our initializa-
tion approach with other pipelines.
ACKNOWLEDGEMENT
This work was co-funded by the European Union
under Horizon Europe, grant number 101092889,
project SHARESPACE. We sincerely thank Dr.
Bernd Krolla, Dr. Johannes K
¨
ohler, and Yongzhi Su
for their mentorship and invaluable support through-
out this research. We also extend our gratitude to Dr.
Jason Rambach for his assistance in providing con-
structive feedback during the writing process.
REFERENCES
Besl, P. and McKay, N. D. (1992). A method for registration
of 3-d shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Bridson, R. and Doran, C. (2014). Quartet: A tetra-
hedral mesh generator that does isosurface stuff-
ing with an acute tetrahedral tile. https://github.
com/crawforddoran/quartet.
Choy, C. B., Xu, D., Gwak, J., Chen, K., and Savarese,
S. (2016). 3d-r2n2: A unified approach for single
and multi-view 3d object reconstruction. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11-14, 2016, Pro-
ceedings, Part VIII 14, pages 628–644. Springer.
Community, B. O. (2018). Blender - a 3D modelling and
rendering package. Blender Foundation, Stichting
Blender Foundation, Amsterdam.
Dawson-Haggerty et al. trimesh.
Donne, S. and Geiger, A. (2019). Learning non-volumetric
depth fusion using successive reprojections. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 7634–7643.
Fridovich-Keil, S., Yu, A., Tancik, M., Chen, Q., Recht,
B., and Kanazawa, A. (2022). Plenoxels: Radiance
fields without neural networks. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 5501–5510.
Furukawa, Y. and Ponce, J. (2009). Accurate, dense, and ro-
bust multiview stereopsis. IEEE transactions on pat-
tern analysis and machine intelligence, 32(8):1362–
1376.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
178

Galliani, S., Lasinger, K., and Schindler, K. (2016).
Gipuma: Massively parallel multi-view stereo recon-
struction. Publikationen der Deutschen Gesellschaft
f
¨
ur Photogrammetrie, Fernerkundung und Geoinfor-
mation e. V, 25(361-369):2.
Garbin, S. J., Kowalski, M., Johnson, M., Shotton, J., and
Valentin, J. (2021). Fastnerf: High-fidelity neural ren-
dering at 200fps. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
14346–14355.
Goesele, M., Curless, B., and Seitz, S. M. (2006). Multi-
view stereo revisited. In 2006 IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion (CVPR’06), volume 2, pages 2402–2409. IEEE.
Hartmann, W., Galliani, S., Havlena, M., Van Gool, L., and
Schindler, K. (2017). Learned multi-patch similarity.
In Proceedings of the IEEE international conference
on computer vision, pages 1586–1594.
Inc., R. (2022). Character Creator 4. Version 4.0.
Jensen, R., Dahl, A., Vogiatzis, G., Tola, E., and Aanæs,
H. (2014). Large scale multi-view stereopsis evalua-
tion. In 2014 IEEE Conference on Computer Vision
and Pattern Recognition, pages 406–413. IEEE.
Jiang, Y., Ji, D., Han, Z., and Zwicker, M. (2020). Sdfd-
iff: Differentiable rendering of signed distance fields
for 3d shape optimization. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 1251–1261.
Kanazawa, A., Tulsiani, S., Efros, A. A., and Malik, J.
(2018). Learning category-specific mesh reconstruc-
tion from image collections. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 371–386.
Kar, A., H
¨
ane, C., and Malik, J. (2017). Learning a multi-
view stereo machine. Advances in neural information
processing systems, 30.
Kazhdan, M., Bolitho, M., and Hoppe, H. (2006). Pois-
son surface reconstruction. In Proceedings of the
fourth Eurographics symposium on Geometry pro-
cessing, volume 7, page 0.
Kellnhofer, P., Jebe, L. C., Jones, A., Spicer, R., Pulli, K.,
and Wetzstein, G. (2021). Neural lumigraph render-
ing. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
4287–4297.
Kolmogorov, V. and Zabih, R. (2002). Multi-camera
scene reconstruction via graph cuts. In Computer
Vision—ECCV 2002: 7th European Conference on
Computer Vision Copenhagen, Denmark, May 28–31,
2002 Proceedings, Part III 7, pages 82–96. Springer.
Kutulakos, K. N. and Seitz, S. M. (2000). A theory of shape
by space carving. International journal of computer
vision, 38:199–218.
Liu, S., Li, T., Chen, W., and Li, H. (2019a). Soft rasterizer:
A differentiable renderer for image-based 3d reason-
ing. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 7708–7717.
Liu, S., Saito, S., Chen, W., and Li, H. (2019b). Learn-
ing to infer implicit surfaces without 3d supervision.
Advances in Neural Information Processing Systems,
32.
Liu, S., Zhang, Y., Peng, S., Shi, B., Pollefeys, M., and Cui,
Z. (2020). Dist: Rendering deep implicit signed dis-
tance function with differentiable sphere tracing. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 2019–
2028.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
ACM siggraph computer graphics, 21(4):163–169.
Luo, K., Guan, T., Ju, L., Huang, H., and Luo, Y. (2019).
P-mvsnet: Learning patch-wise matching confidence
aggregation for multi-view stereo. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 10452–10461.
Martin-Brualla, R., Radwan, N., Sajjadi, M. S., Barron,
J. T., Dosovitskiy, A., and Duckworth, D. (2021). Nerf
in the wild: Neural radiance fields for unconstrained
photo collections. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 7210–7219.
Mescheder, L., Oechsle, M., Niemeyer, M., Nowozin, S.,
and Geiger, A. (2019). Occupancy networks: Learn-
ing 3d reconstruction in function space. In Proceed-
ings IEEE Conf. on Computer Vision and Pattern
Recognition (CVPR).
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2021). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. Communications of the ACM, 65(1):99–106.
Munkberg, J., Hasselgren, J., Shen, T., Gao, J., Chen, W.,
Evans, A., M
¨
uller, T., and Fidler, S. (2022). Extract-
ing triangular 3d models, materials, and lighting from
images. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
8280–8290.
Park, J. J., Florence, P., Straub, J., Newcombe, R., and
Lovegrove, S. (2019). Deepsdf: Learning continu-
ous signed distance functions for shape representa-
tion. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 165–
174.
Pons, J.-P., Keriven, R., and Faugeras, O. (2005). Mod-
elling dynamic scenes by registering multi-view im-
age sequences. In 2005 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition
(CVPR’05), volume 2, pages 822–827. IEEE.
Pumarola, A., Corona, E., Pons-Moll, G., and Moreno-
Noguer, F. (2021). D-nerf: Neural radiance fields
for dynamic scenes. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 10318–10327.
Reiser, C., Peng, S., Liao, Y., and Geiger, A. (2021). Kilo-
nerf: Speeding up neural radiance fields with thou-
sands of tiny mlps. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
14335–14345.
Riegler, G., Ulusoy, A. O., Bischof, H., and Geiger, A.
(2017). Octnetfusion: Learning depth fusion from
HIš: Sparse-View 3D Object Reconstruction with a Hybrid Implicit Initialization
179

data. In 2017 International Conference on 3D Vision
(3DV), pages 57–66. IEEE.
Sch
¨
onberger, J. L., Zheng, E., Frahm, J.-M., and Pollefeys,
M. (2016). Pixelwise view selection for unstructured
multi-view stereo. In Computer Vision–ECCV 2016:
14th European Conference, Amsterdam, The Nether-
lands, October 11-14, 2016, Proceedings, Part III 14,
pages 501–518. Springer.
Shen, T., Gao, J., Yin, K., Liu, M.-Y., and Fidler, S. (2021).
Deep marching tetrahedra: a hybrid representation for
high-resolution 3d shape synthesis. Advances in Neu-
ral Information Processing Systems, 34:6087–6101.
Shewchuk, J. R. (1998). An introduction to the conju-
gate gradient method without the agonizing pain. In
Proceedings of the 7th International Conference on
Meshing Roundtable, Meshing Roundtable, pages 3–
17, Albuquerque, NM, USA. Sandia National Labora-
tories.
Tretschk, E., Tewari, A., Golyanik, V., Zollh
¨
ofer, M.,
Stoll, C., and Theobalt, C. (2020). Patchnets: Patch-
based generalizable deep implicit 3d shape represen-
tations. In Computer Vision–ECCV 2020: 16th Euro-
pean Conference, Glasgow, UK, August 23–28, 2020,
Proceedings, Part XVI 16, pages 293–309. Springer.
Wang, N., Zhang, Y., Li, Z., Fu, Y., Liu, W., and Jiang, Y.-
G. (2018). Pixel2mesh: Generating 3d mesh models
from single rgb images. In Proceedings of the Euro-
pean conference on computer vision (ECCV), pages
52–67.
Wang, Z., Wu, S., Xie, W., Chen, M., and Prisacariu, V. A.
(2021). Nerf–: Neural radiance fields without known
camera parameters. arXiv preprint arXiv:2102.07064.
Wizadwongsa, S., Phongthawee, P., Yenphraphai, J., and
Suwajanakorn, S. (2021). Nex: Real-time view syn-
thesis with neural basis expansion. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 8534–8543.
Wu, T., Zhang, J., Fu, X., Wang, Y., Ren, J., Pan, L., Wu,
W., Yang, L., Wang, J., Qian, C., et al. (2023). Om-
niobject3d: Large-vocabulary 3d object dataset for re-
alistic perception, reconstruction and generation. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 803–814.
Yan, X., Yang, J., Yumer, E., Guo, Y., and Lee, H. (2016).
Perspective transformer nets: Learning single-view
3d object reconstruction without 3d supervision. Ad-
vances in neural information processing systems, 29.
Yariv, L., Kasten, Y., Moran, D., Galun, M., Atzmon, M.,
Ronen, B., and Lipman, Y. (2020). Multiview neural
surface reconstruction by disentangling geometry and
appearance. Advances in Neural Information Process-
ing Systems, 33:2492–2502.
Yu, A., Li, R., Tancik, M., Li, H., Ng, R., and Kanazawa,
A. (2021). Plenoctrees for real-time rendering of neu-
ral radiance fields. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
5752–5761.
Zhang, K., Riegler, G., Snavely, N., and Koltun, V. (2020).
Nerf++: Analyzing and improving neural radiance
fields. arXiv preprint arXiv:2010.07492.
APPENDIX
The DTU (Jensen et al., 2014) dataset is a well-known
benchmark for 3D reconstruction, notable for its di-
versity in object types and challenging imaging con-
ditions. Many images in the dataset capture objects
partially only, resulting in incomplete views that can
complicate reconstruction tasks.
Table 2 provides a quantitative comparison of
PSNR values for two scans (scan40 and scan65)
across different numbers of input views. HI
2
consis-
tently outperforms both IDR and Nvdiffrec, achieving
the highest PSNR values in every configuration. Its
performance remains strong, especially with sparse
input (e.g., 5 views), and delivers the best results for
all tested view counts.
Table 2: PSNR value ↑ for DTU dataset across the different
number of views. The bolded values highlight the best per-
formance for each view count and dataset combination.
scan40 scan65
Views 5 10 20 49 5 10 20 49
IDR 21.87 21.84 23.03 25.11 21.33 22.08 20.27 23.21
Nvdiffrec 22.27 23.25 23.73 23.88 20.3 20.55 21.5 21.57
HI
2
24.05 24.65 25.09 25.631 23.32 24.8 25.05 26.68
Figure 12: Results for the DTU dataset with 10 random im-
ages trained for 2000 iterations. We can see clearly we are
able to produce results close to the ground truth.
Figure 12 visually compares reconstructions pro-
duced by HI
2
against the ground truth. Using only
10 input images and training for 2000 iterations, HI
2
achieves results that closely resemble the ground truth
despite the challenges posed by the dataset. These
results underscore HI
2
’s ability to generate high-
quality reconstructions even under constrained con-
ditions, reaffirming its efficiency.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
180
