
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
Antonia van Betteray
a
, Matthias Rottmann
b
and Karsten Kahl
c
IZMD, University of Wuppertal, Germany
Keywords:
ResNets, Multigrid Methods, Polynomial Smoother, Accuracy-Weight Trade-Off.
Abstract:
The structural analogies of ResNets and Multigrid (MG) methods such as common building blocks like convo-
lutions and poolings where already pointed out by He et al. in 2016. Multigrid methods are used in the context
of scientific computing for solving large sparse linear systems arising from partial differential equations. MG
methods particularly rely on two main concepts: smoothing and residual restriction / coarsening. Exploiting
these analogies, He and Xu developed the MgNet framework, which integrates MG schemes into the design of
ResNets. In this work, we introduce a novel neural network building block inspired by polynomial smoothers
from MG theory. Our polynomial block from an MG perspective naturally extends the MgNet framework to
Poly-Mgnet and at the same time reduces the number of weights in MgNet. We present a comprehensive study
of our polynomial block, analyzing the choice of initial coefficients, the polynomial degree, the placement of
activation functions, as well as of batch normalizations. Our results demonstrate that constructing (quadratic)
polynomial building blocks based on real and imaginary polynomial roots enhances Poly-MgNet’s capacity in
terms of accuracy. Furthermore, our approach achieves an improved trade-off of model accuracy and number
of weights compared to ResNet as well as compared to specific configurations of MgNet.
1 INTRODUCTION
Deep convolutional neural networks (CNNs) are
state-of-the-art methods for image classification
tasks (Krizhevsky et al., 2012; Russakovsky et al.,
2015; He et al., 2015; Dosovitskiy et al., 2021). Es-
pecially ResNets (He et al., 2016a; He et al., 2016b;
Liu et al., 2022) have become increasingly popular,
as they successfully overcome the vanishing gradient
problem (Glorot and Bengio, 2010a).
Nevertheless these networks contain O(10
7
) –
O(10
10
) weights, thus being heavily over parameter-
ized. A reduction of the weight count is clearly de-
sirable, which, however, can result in an undesired
bias. This trade-off is referred to as “bias-complexity
trade-off” which constitutes a fundamental problem
of machine learning, see e.g. (Shalev-Shwartz and
Ben-David, 2014). In this work, we address this prob-
lem from a multigrid (MG) perspective. MG methods
are hierarchical solvers for large sparse systems of lin-
ear equations that arise from discretizations of par-
tial differential equations (Trottenberg et al., 2001).
The main idea of MG consists of two components,
a
https://orcid.org/0000-0002-2338-1753
b
https://orcid.org/0000-0003-3840-0184
c
https://orcid.org/0000-0002-3510-3320
namely a local relaxation scheme, which is cheap to
apply, but slow to converge as it lacks the possibility
to address global features. Thus it is complemented
with a coarse grid correction, that exploits a repre-
sentation of the problem formulation on a coarser
scale thus making long range information exchange
easier. In classical MG theory this complementarity
can be associated with the split of the error into geo-
metrically oscillatory and smooth functions. Where
the oscillatory part is quickly dampened by the lo-
cal relaxation scheme and the smooth part accurately
described and dealt with on coarser scales (Trotten-
berg et al., 2001). The authors of ResNet (He et al.,
2016a) already mentioned the inherent similarities be-
tween MG and residual layers. This structural con-
nection was further elaborated in (He and Xu, 2019),
where ResNets, composed of residual layers (repre-
senting the smoothers) and pooling operations (repre-
senting the coarse grid restrictions), are cast into a full
approximation scheme (FAS). The resulting frame-
work, termed MgNet, further exploits the similarity
to MG methods, in which the discretized operators
stemming from PDEs remain fixed between consec-
utive coarsenings/poolings. This yields a justifica-
tion for sharing weight tensors across multiple resid-
ual layers, e.g. fig. 1(b) and fig. 1(c), reducing the
van Betteray, A., Rottmann, M. and Kahl, K.
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets.
DOI: 10.5220/0013382800003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 181-191
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
181
A
i
ℓ
B
i
ℓ
+
σ
σ
A
i+1
ℓ
B
i+1
ℓ
+
σ
σ
(a) residual
A
ℓ
B
(k)
ℓ
−
+
σ
σ
A
ℓ
B
(k+1)
ℓ
−
+
σ
σ
(b) non-
stationary
A
ℓ
B
ℓ
−
+
σ
σ
A
ℓ
B
ℓ
−
+
σ
σ
(c) stationary
A
ℓ
αℓ
(k+1)
−
+
σ
σ
A
ℓ
α
(k+1)
ℓ
−
+
σ
σ
(d) polynomial
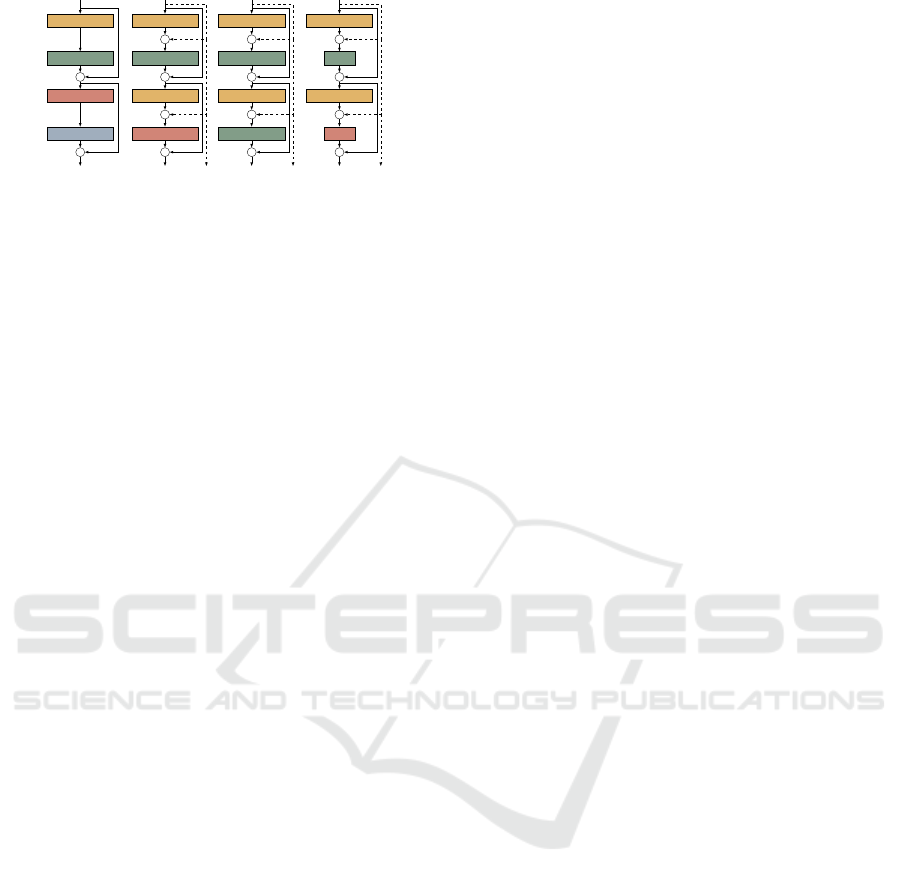
Figure 1: Weight sharing in ResNet and MgNet; (1a)
ResNet-blocks, no weight sharing; (1b) MgNet-blocks,
shared A
ℓ
; (1c) MgNet-blocks, shared layers A
ℓ
and B
ℓ
and
Poly-MgNet (fig. 1d).
overall weight count of the network. A joint per-
spective of multigrid structures in all dimensions was
taken by (van Betteray et al., 2023), resulting in an
improved weight-accuracy trade-off and thus demon-
strates that ResNets are overparameterized.
In this work, we exploit additional structural sim-
ilarities between MG and residual networks to further
reduce the weight count of MgNet. A typical ResNet
block is built from two convolutions A and B gated
by a residual connection. Considering a given system
of linear equations Au = f , so-called MG smoothing
applies an operation B to the residual f −Au, i.e.,
u ← u + B( f −Au),
in order to improve u, i.e., reduce the residual, itera-
tively. In a nutshell, this operation has the property
of smoothing the error associated to the current ap-
proximation u. In MgNet, B is chosen as a learnable
convolution operator, but here we consider a cheaper
alternative that reuses the convolution A in its defini-
tion. Again motivated by the linear-algebra analogy,
we consider polynomials p(A) for B with only a hand-
ful of learnable parameters, thus reducing the number
of parameters by almost 50%. A special case and the
simplest instance of this idea is the Richardson iter-
ation (Trottenberg et al., 2001) where B = ωI, with
I the identity matrix and ω a scalar. Clearly, we do
not want to limit ourselves to such trivial polynomials
and explore in this work to which extent smoothing
iterations using polynomial approximations are suit-
able within MgNet, e.g. fig. 1(c), to further reduce the
number of weights.
We summarize our contribution as follows:
1. We introduce a new building block, to fur-
ther reduce the number of weights in multigrid-
inspired CNNs, such as MgNet. These meth-
ods are inspired by MG smoothers, namely block
smoothers, polynomial smoothers and Richard-
son smoothers, yielding layer modules of reduced
weight counts.
2. We implement this building block into MgNet
and show significant reductions of weight counts
while almost maintaining classification accuracy.
3. Our approach yields further insights into the
inherent connection of MG and ResNets and
demonstrates that MG methodology is useful for
the construction of weight-count-efficient CNNs.
The remainder of this article is organized as fol-
lows: Section 2 discusses related works. In section 3
we elaborate on the similarities of residual networks
and MG, followed by the construction of our layers
inspired by MG smoothers. Ultimately numerical re-
sults are presented in section 4.
2 RELATED WORKS
In this section, we provide an overview of related
works, classified into four categories of approaches,
sorted from remotely to closely related.
Channel Reduction. The set of existing methods
for the reduction of weight counts and the set of exist-
ing methods to reduce the computational complexity
of CNNs have a significant intersection. As one of
many possible approaches, a reduction of computa-
tional complexity can be achieved by a reduction of
the number of channels in convolutional layers. Con-
sidering the simplified case where the number of input
channels c equals the number of output channels of a
given convolutional layer and the filter extent s be-
ing equal in both directions, the number of weights of
such a layer is given by s
2
·c
2
. Thus, a reduction of c
results in a clear reduction of the number of weights.
In (Molchanov et al., 2016) it was shown experimen-
tally, that there is redundancy in CNNs, which al-
lows for cutting connections between channels after
the CNN has been trained. This process is known as
CNN pruning (Hassibi and Stork, 1992; Han et al.,
2015; Li et al., 2017). At the same time pruning and
other sparsity enhancing methods (Changpinyo et al.,
2017; Han et al., 2017) reduce the model complexity
in terms of weights. While these approaches first train
a CNN to convergence, in (Gale et al., 2019) the CNN
is pruned periodically during training. In (Lee et al.,
2019) a saliency criterion to identify structurally im-
portant connections is proposed, which allows for
pruning before training. We also reduce the weight
count before training, however, our approach is based
on the inherent similarity of MG and ResNets, utiliz-
ing MG methodology to find an explanation for more
weight count efficient layer modules.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
182

A related research area is the field of neural archi-
tecture search (Elsken et al., 2019; Cha et al., 2022),
where the goal is to search the space of architectures
close to optimal ones w.r.t. chosen optimization crite-
ria. If the focus is on computational efficiency, then
tuning the channel hyper-parameters is one of many
possible approaches (Gordon et al., 2017), resulting
in a reduction of weight count. While the aforemen-
tioned approaches use optimization procedures to re-
duce the number of weights, we utilize MG method-
ology that yields an explanation for the achieved effi-
ciency.
Modified Layers. Another line of research ad-
dresses the specific construction of convolutional lay-
ers. Compared to the aforementioned approaches, the
constructions outlined in this section are based on hu-
man intuition and conventional methods to improve
computational efficiency. Also in this line of research,
there is a close connection between computational ef-
ficiency and the reduction of the number of weights.
One approach to reduce the number of weights is the
use of grouped convolutions (Krizhevsky et al., 2012;
Xie et al., 2017), where the channels are grouped
into g decoupled subsets, each convoluted with its
own set of filters, thus decreasing the weight count to
s
2
·
c
g
2
. This decoupled structure impedes the ex-
change of information across the channels. To over-
come this issue, e.g. in (Zhang et al., 2018) a com-
bination of groupings and channel shuffling, termed
ShuffleNet, has been proposed.
A combination of layers, which also allows for
a reduction in floating point operations, are so-
called depth-wise separable convolutions, introduced
in (Howard et al., 2017; Sandler et al., 2018; Howard
et al., 2019) as key feature for the MobileNet archi-
tecture: a depth-wise convolution, i.e., grouped con-
volution with g = c is followed by a point-wise 1 ×1
convolution, to create a linear combination of the out-
put of the former. This results in a reduced weight
count of s
2
+ 2c, i.e., each kernel slice of extent c
2
is
replaced by a rank - one approximation.
Polynomial Neural Networks. Polynomial neu-
ral networks are NNs that produce an output be-
ing a polynomial of the input. This approach was
first pursued via the group method of data handling
(GMDH) (Oh et al., 2003). It determines the structure
of a polynomial model in a combinatorial fashion and
selects the best solution based on an external criterion,
e.g. least squares. While these methods belong to self-
organizing neural networks, another category consid-
ers the output of the network as a high-order poly-
nomial of the input (Shin and Ghosh, 1991; Chrysos
et al., 2020; Chrysos et al., 2022). Our goal is to uti-
lize polynomials as a building block in CNNs without
reframing their purpose to polynomial approximation.
Multigrid Inspired Architectures. In scientific
computing, MG methods are algorithms based on hi-
erarchical discretizations, to efficiently solve systems
of (non-)linear differential equations (PDEs) (Trot-
tenberg et al., 2001; Treister and Yavneh, 2011;
Kahl, 2009). Some works utilizes CNNs to solve
PDEs (Tomasi and Krause, 2021), e.g. by estimat-
ing optimal preconditioners (G
¨
otz and Anzt, 2018) or
prolongation and restriction operators (Katrutsa et al.,
2017). Another line of research focuses on architec-
tures based on common computational components
as well as similarities of CNNs and MG (He et al.,
2016a). In (Ke et al., 2017) an architecture of pyramid
layers of differently scaled convolutional layers, with
each pyramid processing coarse and fine grid repre-
sentations in parallel, is proposed. This MG archi-
tecture improves accuracy, while being weight-count
efficient.
The close similarities between CNNs and MG
are further exploited in (He and Xu, 2019), where a
framework termed MgNet is introduced. It yields a
justification for sharing weight tensors within convo-
lutions in subsequent ResNet blocks with the same
spatial extent. Utilizing MG in the spatial dimen-
sions, MgNet models have, compared to ResNets
with the same number of layers, fewer weights, while
maintaining classification accuracy. An alternating
stack of MgNet blocks and poolings can be viewed
as the left leg of an MG V -cycle. Another hierar-
chical structure, however in the channel dimension,
is proposed in (Eliasof et al., 2020). Their building
block, termed multigrid-in-channels (MGIC), is built
on grouped convolutions and coarsening via channel
pooling. Utilizing MG in the channel dimensions,
this approach improves the scaling of the number of
weights with the number of channels from quadratic
to linear. A unified MG perspective is taken on both
the spatial and channel dimensions in (van Betteray
et al., 2023). The introduced architecture, called
multigrid in all dimensions (MGiaD), improves the
trade-off between the number of weights and accu-
racy via full approximation schemes in the spatial and
channel dimensions, including MgNet’s weight shar-
ing. Similarly to these approaches, we exploit the in-
herent similarities between CNNs and MG to further
reduce the weight count. Our focus in this work is to
cast MG smoothers into CNN layer modules, which
has not been studied in related work.
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
183

3 RESIDUAL NETWORKS AND
MULTIGRID METHODS
MG consists of two complementary components, the
smoother and the coarse grid correction. In a re-
cursive fashion, the coarse grid correction is typi-
cally treated by restricting/pooling in spatial dimen-
sions, then smoothing on the next coarser scale and
then applying another even coarser coarse grid cor-
rection, etc. This structure is already resembled by
typical CNNs which alternate between convolutions
and poolings. In MG and in CNNs, the smoother is
the main work step with the highest computational ef-
fort. A suitable choice of it is vital for the success of
an MG method and we will see that these findings are
beneficial for CNNs as well. In this section we intro-
duce the smoother, the coarsening and unify the MG
and CNN perspective.
Revisiting ResNet and MgNet. Given a data-
feature relation A(u) = f , the right-hand-side f rep-
resents the data space and u the features. In CNNs, A
is learnable and A(u) = f can be optimized (He and
Xu, 2019). The mappings between data f ∈ R
m×n×c
and features u ∈ R
m×n×h
are given by
A : R
m×n×h
7→ R
m×n×c
, s.t. A(u) = f (1)
B : R
m×n×c
7→ R
m×n×h
, s.t. u ≈B( f ), (2)
where m and n characterize the spatial resolution di-
mensions of the input and c and h determine the di-
mension of the input and output channel respectively,
i.e. number of input and output channels can differ. A
can be considered as a feature-to-data map, while B is
applied to elements of the data space, is also referred
to as feature extractor. In MG the property u ≈ B( f )
is beneficial for the method’s convergence, which will
be explained in the following. In the context of CNNs,
convolutional mappings usually are combined with
non-linear activation functions. For a clear presenta-
tion of the similarities between CNNs and MG, the
non-linearities are omitted for now. Considering a
large sparse system of linear equations A(u) = f , ob-
taining the direct solution u is not feasible. Therefore,
the true solution is iteratively approximated by
e
u. The
resulting error e = u −
e
u fulfills the residual equation
r = f −A(
e
u) = A(u −
e
u) = Ae, (3)
where r is referred to as residual. Now, given an ap-
propriate feature extractor B, the approximated error
e
e = Br can be used to update the approximated solu-
tion
e
u ←
e
u +
e
e. Repeating this scheme with eq. (3)
yields a non-stationary iteration
u ← u + B
(k)
( f −A(u)) for k = 1,2,. .. (4)
to solve A(u) = f approximately. Hence, that fea-
ture extractors B
(k)
depend on iteration k, yet eq. (4)
can be turned into a stationary scheme with a fixed
B, i.e. a shared weight tensor. On the other hand,
interpreting A as a data-feature mapping motivates a
fixed A, i.e. also a shared weight tensor. As exam-
ined in (He and Xu, 2019) the structure of eq. (4),
with activation functions added, resembles a ResNet-
block. Combined with eq. (3) yields a non-stationary
iterative scheme. Explicitly, given the solution u
(k)
of
iteration k the residual
r
(k+1)
= f −Au
(k+1)
= (I −AB
(k)
)r
(k)
(5)
is propagated to k + 1-th iteration and the coefficient
(I −BA) equals a ResNet-block r
(k+1)
= r
(k)
+ BAr
(k)
(cf. fig. 1a). The main difference between MgNet and
ResNet is sharing one or more weight tensors. Two
ResNet-blocks at one resolution level do not share
any weight tensors (cf. fig. 1a). The weight count of
such two distinct blocks is given by 4 ·(s
2
×c ×h).
In MgNet, for the non-stationary case, i.e. only A is
shared, the weight count is reduced to 3 ·(s
2
×c ×h).
For the stationary case, i.e. sharing both A and B the
weight count for two blocks is only 2 ·(s
2
×c ×h).
The pseudo-inverse of A is generally a dense matrix,
which requires the representation as a fully connected
weight layer, but this conflicts with the required con-
volutional structure of the feature extractors B
(k)
(re-
spectively B). Even with an optimal choice of B
(k)
the convergence of the iteration eq. (4) is inevitably
slow, due to acting locally. However, convolutional
operators B
(k)
are computationally light. A few ap-
plications of the iteration have a smoothing effect on
features, and the resulting error can be accurately rep-
resented at a coarser resolution.
Resolution Coarsening. The restriction of the
(residual) data to coarser scales, facilitated by map-
pings
R
ℓ+1
ℓ
: R
m
ℓ
×n
ℓ
×c
ℓ
7→ R
m
ℓ+1
×n
ℓ+1
×c
ℓ+1
, (6)
yields a hierarchy of resolution levels ℓ = 1,.. . ,L. On
each level ℓ the smoothing iteration (4) can be applied
by resolution-wise mappings A
ℓ
and B
(k)
ℓ
, where on
each level ℓ initially u
(0)
ℓ
= 0. Note that the feature
extractors can also be stationary. Equivalent to re-
strictions in MG, in CNNs the resolution dimension
is reduced by pooling operations with stride greater
than 1. In CNNs usually the channel dimension is in-
creased in the process. Corresponding to the coarsen-
ing leg of a standard MG V -cycle (Trottenberg et al.,
2001), the combination of ν smoothing iterations on
each resolution level ℓ and L −1 restrictions yields al-
gorithm 1.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
184
f
ℓ
u
ℓ
...
1 0 1 1
0 1 1 1
0 1 0 0
1 0 0 1
A
ℓ
B
ℓ
Π
ℓ+1
ℓ
R
ℓ+1
ℓ
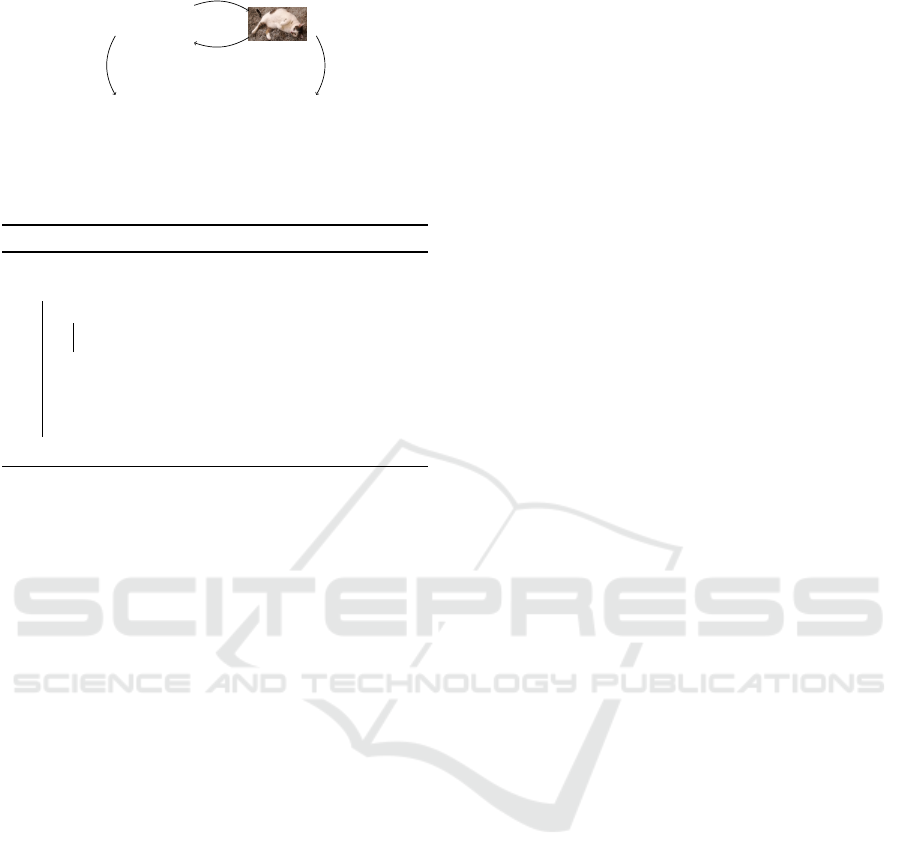
Figure 2: Data-feature relations A
ℓ
and B
ℓ
on resolution
level ℓ followed by transfer to coarser resolution ℓ + 1.
A
ℓ
applied to the features u
ℓ
, calculation of the residual
r
ℓ
= f
ℓ
−A
ℓ
u
ℓ
, on which the feature extractor B
ℓ
is applied.
Algorithm 1: \-MgNet( f
ℓ
).
Initialization: u
ℓ
= 0
1 for ℓ = 1,.. .,L do
2 for k = 1, ...,ν do
3 u
(k+1)
ℓ
= u
(k)
ℓ
+ B
(k)
ℓ
( f
ℓ
−A
ℓ
(u
(k)
ℓ
))
4 end
5 u
(0)
ℓ+1
= 0
6 f
ℓ+1
= R
ℓ+1
ℓ
( f
ℓ
−A
ℓ
(u
(ν)
ℓ
))
7 end
Full Approximation Scheme (FAS). So far acti-
vation functions, potential non-linear poolings and
normalization operations, which are characteristic of
CNNs, have been disregarded. However, if we now
take these into account, we obtain a non-linear over-
all structure for CNNs. The non-linearity in MG prob-
lems yields multiple possible minima, so that the ini-
tial solution not only determines the solution, but also
has a crucial influence on the convergence rate. Con-
sequently, an initial guess u
(0)
ℓ+1
at the coarser scale
determined by the current feature approximation u
ℓ
,
is likely to dominate u
(0)
ℓ+1
= 0. Therefore, the feature
approximations of non-linear problems are also pro-
jected to the coarser scale by a mapping
Π
ℓ+1
ℓ
: R
n
ℓ
×m
ℓ
×c
ℓ
7→ R
n
ℓ+1
×m
ℓ+1
×c
ℓ+1
, (7)
to initialize the solution u
(0)
ℓ+1
= Π
ℓ+1
ℓ
u
(ν)
ℓ
. Given
this non-trivial initial solution on level ℓ + 1, the re-
stricted residual data f
ℓ+1
requires an adjustment by
A
ℓ+1
(u
ℓ+1
).
Accordingly, in algorithm 1 lines 5 and 6 are
changed to
u
(0)
ℓ+1
= Π
ℓ+1
ℓ
u
(ν)
ℓ
(8)
f
ℓ+1
= R
ℓ+1
ℓ
( f
ℓ
−A
ℓ
(u
(ν)
ℓ
)) + A
ℓ+1
(u
(0)
ℓ+1
). (9)
In the CNN context, the projection operation (7) cor-
responds to another pooling operation, but it has no
exact counterpart in the general ResNet architecture.
Figure 2 summarizes relevant mappings and schemes
the role of B
ℓ
as feature extractor, A
ℓ
as data-feature
mapping, followed by restriction and projection, re-
spectively.
3.1 Polynomial (Smoother) in Residual
Blocks
Thus far the iterative scheme, eq. (4), was either con-
sidered to be stationary or non-stationary with matri-
ces B
(k)
or B, respectively. Even though B is a rough
and computationally inexpensive approximation for
A
−1
, in order to achieve a reduction of the residual we
can further reduce the number of learnable weights
and increase the interpretability of B by replacing it
by a polynomial (smoother) p
d
(A) ≈ A
−1
of degree
d ∈ N
+
, i.e., the residual block then reads
u ← u + p
d
(A)( f −A(u)). (10)
In here p
d
is a polynomial
p
d
(A) =
d
∑
i=0
α
i
A
i
. (11)
with (learnable) coefficients α
i
. In the case of polyno-
mial smoothers (B = p
d
(A)), the non-stationary case
is considered, e.g. only weight tensor A is shared. Fur-
thermore these models are denoted by MgNet
p
d
.
In order to ease the following discussion note that
under the assumption that A is diagonalizable, i.e.,
A = XΛX
−1
with a matrix X containing the eigen-
vectors of A as its columns and a diagonal matrix Λ
of eigenvalues, we find
p
d
(A) =
d
∑
i=0
α
i
A
i
= X
d
∑
i=0
α
i
Λ
i
!
X
−1
. (12)
Thus the action of the polynomial on a matrix A is de-
termined solely by the evaluation of the scalar poly-
nomial p
d
with coefficients α
i
on the eigenvalues of
A. As it alleviates notation we are thus considering
the polynomial p
d
both as a scalar polynomial and
a matrix valued polynomial using the same notation.
Moreover, from now on for clarity in notation, let Λ
denote the spectrum of A.
Residual Blocks as Polynomials. Let B = p
d
(A) be
a polynomial feature extractor, than the residual equa-
tion 3 yields
r
(k+1)
= (I −Ap
d
(A))r
(k)
= q
d+1
(A)r
(0)
, (13)
where the factor (I −Ap
d
(A)) itself is a polynomial
q
d+1
(A) of degree d + 1. Hence, using eq. (11) we
find
q
d+1
(A) = I −Ap
d
(A) = I −
d
∑
i=0
α
i
A
i+1
. (14)
and see that q
d+1
is normalized with a constant co-
efficient equal to 1, i.e., q
d+1
(0) = 1, which implies
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
185

that residual components belonging to kernel modes
of A are unaffected by such a polynomial correction
approach
1
. Leveraging the normalization of q
d+1
we
obtain its decomposition into a product of linear fac-
tors as
q
d+1
(A) =
d+1
∏
i=1
(I −
1
ζ
i
A) with q
d+1
(ζ
i
) = 0 and ζ
i
∈C.
(15)
That is, instead of learning the coefficients α
i
we can
equivalently learn the roots of the polynomial q
d+1
.
While it is not immediately clear how α
i
need to be
chosen to ensure p
d
(A) ≈A
−1
to obtain a reduction of
the residual, the roots of the polynomial q
d+1
have an
immediate interpretation with respect to the reduction
of the residual. Again assuming that A is diagonal-
izable and taking into account that polynomials tend
to be small only close to their roots. That is, writing
r
(k)
=
∑
j
γ
j
x
j
as a linear combination of the eigenvec-
tors of A we find
q
d+1
(A)r
(k)
=
∑
j
d+1
∏
i=1
1 −
λ
j
ζ
i
γ
j
x
j
, (16)
which is small, if the roots ζ
i
capture the distribution
of the eigenvalues of A correctly. To be more spe-
cific it is clear that roots close to the boundaries of the
spectrum of A, Λ ⊆C, are required in order to prevent
catastrophic over correction of the respective eigen-
components of the residual (Saad, 2003)(cf. fig. 4).
Yet, the aim of minimizing the residual is consis-
tent with keeping the polynomial within the spectrum
small. To that end eigenvalues located at the spec-
trum’s boundary are chosen as roots for the polyno-
mial. Obviously A
T
̸= A holds, which yields guaran-
teed complex conjugated pairs of eigenvalues. This
can be used to construct a polynomial in linear factor
representation, covering the extend of the real axis,
e.g. fig. 4, and quadratic terms, covering the extend of
the imaginary area and avoiding complex arithmetic
within the CNN at the same time
2
.
The residual propagation eq. (3) for a pair of com-
plex conjugated eigenvalues z and ¯z yields
r
(k+1)
= (1 −
1
z
A)(1 −
1
¯z
A)r
(k)
= ˜q
d+1
r
(k)
(17)
where ˜q
d+1
itself is a quadratic polynomial of degree
d + 1 with roots z = a+ib and its complex conjugated
counterpart ¯z with i the imaginary unit. Thus, the re-
sulting polynomial is the product of m linear polyno-
mials ˆq
i
and n quadratic polynomials ˜q
i
1
Clearly such modes are not affected in a general resid-
ual block with a (full) parameter matrix B either.
2
E.g. nn.ReLU does not support complex values, c.f.
issues #47052, #46642.
Figure 3: Surface representation of the spectrum Λ for the
corresponding matrix A ∈ R
64×64×3×3
. The x-axis repre-
sents the real parts, while y-axis corresponds to the imagi-
nary part. The z-axis illustrates the amplitude of the polyno-
mial function of abs(q
4
(Λ)), which has roots at the eigen-
values with minimal and maximal real parts, as well as the
and complex conjugated pair of eigenvalues with the max-
imal imaginary part. This visualization allows for an intu-
itive identification of the spectrum’s maximal amplitude.
q
m+2n
(A) =
m
∏
i=1
ˆq
i
(A) ·
2n
∏
j=1
˜q
i
(A), (18)
s.t. m + 2n.
The second observation revolves around the fact
that the decomposition of q
d+1
into a product of linear
factors can be viewed as a sequence of linear resid-
ual blocks, i.e., one residual block with B = ˆp
d
(A) is
equivalent to d + 1 residual blocks with B
(k)
=
1
/ζ
k
.
The quadratic terms also can be viewed as a sequence
of pairs of linear residual blocks, i.e. two residual
blocks with B = ˆq
2d
are equivalent to B
(k)
=
1
/z and
B
(k+1)
=
1
/¯z respectively. The focus of our work is
on the polynomial perspective of a residual block, de-
noted by q. The iteration can be rewritten as
u
(k+1)
= u
(k)
+ (
2a
a
2
+ b
2
−
1
a
2
+ b
2
)Ar
(k)
. (19)
For the ease of notation from now on the degree
of a polynomial q
d
is d. Consequently the degree
of a polynomial p is d − 1. Furthermore combin-
ing eq. (10) with eq. (18) results in a polynomial ver-
sion of MgNet, referred to as Poly-MgNet, which is
outlined in algorithm 2.
Due to observations made in our experiments
we limit the polynomial with linear factors, i.e. ˆq
i
in eq. (18) to m = 2. To cover the extent of the spec-
trum on the real axis we choose the real part (ℜ) of
eigenvalues with smallest and biggest real part for
the polynomial roots, i.e. ζ
(1)
= minℜ(Λ) and ζ
(2)
=
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
186

Algorithm 2: Poly-\-MgNet( f
ℓ
).
Initialization: u
(0)
1
= 0
1 for ℓ = 1,.. .,L do
2 for k = 1, ...,m do
3 u
(k+1)
ℓ
= u
(k)
ℓ
+
1
ζ
(k)
ℓ
( f
ℓ
−A
ℓ
(u
(k)
ℓ
))
4 end
5 u
ℓ
= u
(m)
6 for k = m + 1, ..., n do
7 z = ζ
(k)
ℓ
∈ C
8 a = ℜ(ζ
(k)
),b = ℑ(ζ
(k)
)
9 r
(k)
= f
ℓ
−Au
(k)
ℓ
10 u
(k+1)
ℓ
= u
(k)
ℓ
+
1
a
2
+b
2
(2a −A)r
(k)
11 end
12 u
ℓ+1
= Π
ℓ+1
ℓ
u
(m+n)
ℓ
13 f
ℓ+1
= R
ℓ+1
ℓ
( f
ℓ
−A
ℓ
(u
ℓ
)) + A
ℓ+1
(u
ℓ+1
)
14 end
maxℜ(Λ) as polynomial coefficients α
(k)
=
1
/ζ
(k)
.
Models with polynomial building blocks with a poly-
nomial degree d = m = 2 are denoted by MgNet
q
2
.
For degrees d ≥ 4 the roots for the quadratic polyno-
mials ˜q
i
are chosen as follows. For a single quadratic
term ˜q
1
, z = argmax(ℑ(Λ)) is the eigenvalue with
biggest imaginary part (ℑ), and ¯z its complex coun-
terpart. For polynomials of higher degrees we con-
tinue to choose roots, that are located at the border
of the spectrum to satisfy the requirement of small
polynomial values. The roots calculated for a poly-
nomial with degree d = 4 are deployed in the result-
ing polynomial q
4
(A) followed by its evaluation on
Λ. Consequently, the spectrum is a plane spanned
over the roots, e.g. shown in fig. 3. The biggest eigen-
value w.r.t. the imaginary part, and its complex coun-
terpart are chosen as roots for q
6
(A). This recursion
of spanning the spectrum on the roots to determine
new maxima can be repeated as often as required, as
summarized in algorithm 3. The resulting models are
denoted by Poly-MgNet
q
d
.
Another observation is that enhancing the im-
pact of the real valued coefficients by constructing a
quadratic version of ˆq in eq. (18), s.t.
r
(k+1)
= (I −αA
2
)r
(k)
= ˆg
d
(A
2
)r
(k)
(20)
has a beneficial impact on accuracy. Omitting it-
eration indices, a polynomial ˆg(A
2
) with coeffi-
cient α has roots at ±
1
√
α
. Corresponding to the
idea to keep the polynomial small within the spec-
trum we chose the coefficient α =
1
ζ
2
with ζ
k
=
max(|max(ℜ(Λ))|,|min(ℜ(Λ))|) to ensure that the
root is at least at the border (or beyond) of the spec-
Algorithm 3: Roots ζ
d
for polynomials d ≥ 6.
Initialization:
ζ
(1)
= max(ℜ(Λ))
ζ
(2)
= min(ℜ(Λ))
ζ
(3)
= argmax(ℑ(Λ)), ζ
4
= ζ
(3)
1 for d = 6,8, . .. do
2 q
d
=
∏
d−2
k=1
(1 −
1
ζ
(k)
Λ)
3 ζ
(d−1)
= argmax(|q
d
(Λ)|)
4 ζ
(d)
= ζ
(d−1)
5 end
trum. Note that the degree of the overall polynomial
g
d
is now d = 2m + 2n. Consequently eq. (18) is
rewritten as
g
2m+2n
(A) =
2m
∏
i=1
ˆg
i
(A
2
) ·
2n
∏
j=1
˜q
i
(A), (21)
and models that include the reinforced real part poly-
nomial g are denote by Poly-MgNet
g
d
. The following
discussions refer to ˆq
d
, although they can be applied
without restriction fo ˆg
d
.
To ReLU or not to ReLU Thus far we ignored the
fact, that typically regular ResNet-blocks are build
with rectified linear unit (ReLU) activation functions
σ = max(0,x). In ResNet, as depicted in fig. 1, ev-
ery convolution A, B is followed by ReLU, which
also applies for MgNet, independent of shared opera-
tions. Furthermore this setting is applied in the special
case B = p
d−1
(A), especially for d = 1. The iterative
scheme with ReLU functions σ are given by
u
(k+1)
= u
(k)
+ σ p
d−1
(A)σ( f −Au
(k)
) (22)
However, our polynomial view on residual blocks
collides with the fact that the max-function typically
cannot be a term of a polynomial. Nevertheless ReLU
has a major influence on a high expressiveness of
CNNs which prompts us to review ReLU placements
in our polynomial residual blocks. To peruse the ac-
tual idea of ReLU-free polynomials a single ReLU is
applied on every resolution, namely before resolution
coarsening level, s.t. the initial solution is given by
u
(0)
ℓ+1
= Π
ℓ+1
ℓ
σu
(ν)
ℓ
(23)
where ν = m + n blocks denotes a polynomial degree
d = m + 2n. In our experiments we found, that given
this setting our models are not able to explain enough
non-linearity from the data resulting in a loss in accu-
racy. To regain expressive capacity of our polynomial
models towards data non-linearity, we placed ReLU
after calculating the residual
u
(k+1)
= u
(k)
+ p
d−1
(A)σ( f −Au
(k)
), (24)
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
187
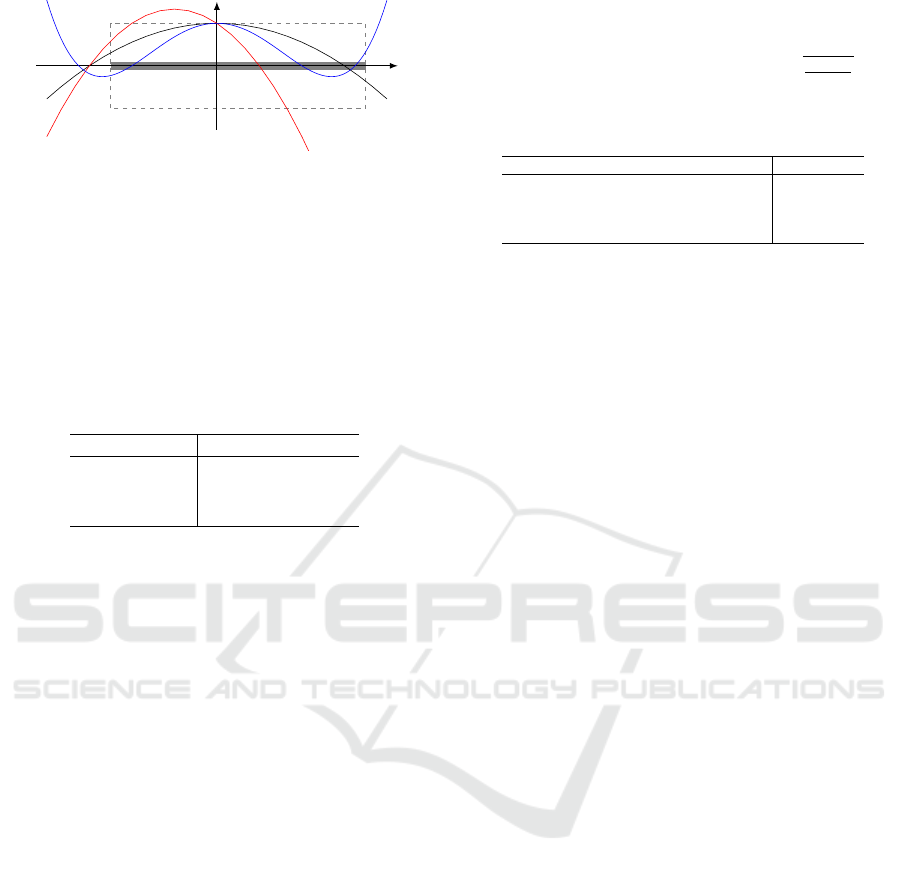
Figure 4: Schematic illustration of polynomials q
2
, (two
blocks), with different choices of roots from an exemplary
(real) spectrum.
which showed to be beneficial to the models perfor-
mances. Furthermore the combination of eq. (23)
and eq. (24) showed to be the most beneficial for
the accuracy. The introduced options are summarized
in table 1. Another question of interest is the place-
Table 1: Overview over possible placements of ReLU func-
tions σ in a polynomial block u ←u + p
d−1
(A)r.
σu
(ν)
ℓ
σp
d−1
(A) σr
eq. (22) × ×
eq. (23) ×
eq. (24) ×
eq. (23) + eq. (24) × ×
ment of batch normalization operations (bn) within
the polynomials. While their role is not completely
clear, we found, that different placements have influ-
ence on the classification accuracy of the correspond-
ing model. Although bn is typically applied before
ReLU, it is not required. In the following section, we
analyze and discuss various MgNet
q
d
bn and ReLU
configurations to identify the most effective setup.
4 EXPERIMENTAL RESULTS
We study the effect of our polynomial building blocks
q
d
(A) on the accuracy-weight trade-off by evaluating
the corresponding models on CIFAR-10. We report
the weight count and mean train and test accuracy
with standard deviation (std.) of three runs. Although
Poly-MgNet is robust to different coefficient initial-
izations, cf. table 2, we initialize the coefficients of
our models based on the spectrum of the convolutions
to align with our underlying intuition.
Experimental Setup. Our models are implemented
in Pytorch (Paszke et al., 2019). We train our mod-
els in batches of 128 for 400 epochs and use an op-
timizer based on stochastic gradient descent with a
momentum of 0.9 and a weight decay of 10
−4
. The
initial learning rate is set to 0.05 which is adapted by
a cosine-annealing scheduler (Loshchilov and Hutter,
2017).
Table 2: Influence of coefficient initialization for mod-
els Poly-MgNet
q
2
and Poly-MgNet
g
4
. The coefficients
are drawn either uniformly from the spectrum Λ. s.t.
U(λ
min
,λ
max
) or from U(−t,t) with t =
q
6
c
in
+c
out
. The
latter follows the Xavier uniform distribution, which
is the standard approach for initializing convolutional
weights (Glorot and Bengio, 2010b).
Dataset polynomial initialization acc (± std)
CIFAR-10 q
2
U(λ
min
,λ
max
) 94.89 (0.16)
Xavier 94.76 (0.16)
g
4
U(λ
min
,λ
max
) 95.28 (0.19)
Xavier 95.32 (0.13)
Weight Count of Residual Blocks. As the weight
tensor A is shared across the polynomial blocks in our
approach the only learnable parameter is the single
polynomial coefficient α
(k)
ℓ
=
1
/ζ
(k)
ℓ
, which is associ-
ated to each block. A polynomial of degree d only
incurs d parameters and it is thus essentially for free
to increase the polynomial degree w.r.t. the number of
parameters.
More specifically, let ν be the number of polyno-
mial building blocks on one resolution level ℓ and let
the size of the weight tensor be given by s
2
×c
2
, then
the weight count of different types of residual blocks
and polynomial setting is given as follows :
• ResNet18: (s
2
×c
2
) ·2 ·ν,
• MgNet
A
: (s
2
×c
2
) ·(1 + ν),
• MgNet
AB
: (s
2
×c
2
) ·2,
• MgNet
q
d
: (s
2
×c
2
) + ν.
A regular ResNet18 block is built from 2 residual
blocks on 4 resolution levels with [64,128, 256, 512]
channels. The overall weight count of ResNet18 is
11.2 million (M). The corresponding MgNet
A,B
has
the same number of resolution levels, but according
to (He and Xu, 2019), the number of channels on the
fourth layer is reduced to 256. This setting results
in an overall weight count of 2.7M weights. Poly-
MgNet
q
d
with the same number of resolution levels
has a weight count of 1.3M.
ReLU Placement. In this section we examine the
different options for the placement of activation func-
tions and batch normalizations for polynomials q
2
,
corresponding to eq. (18) and g
4
, g
6
and g
8
, corre-
sponding to eq. (21) on CIFAR-10 to determine suit-
able settings. In table 1 the ReLU combinations we
determined as the most relevant are summarized. The
impact of these combinations on the accuracy of Poly-
MgNet
q
2
are compared in table 3. Recall that q
2
corresponds to ˆq
2
in eq. (18) and is linear with real-
valued roots. We observe that placing ReLU and bn at
the same places as in MgNet
A,B
, i.e. both A and B are
followed by ReLU and bn, leads to a lower accuracy
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
188
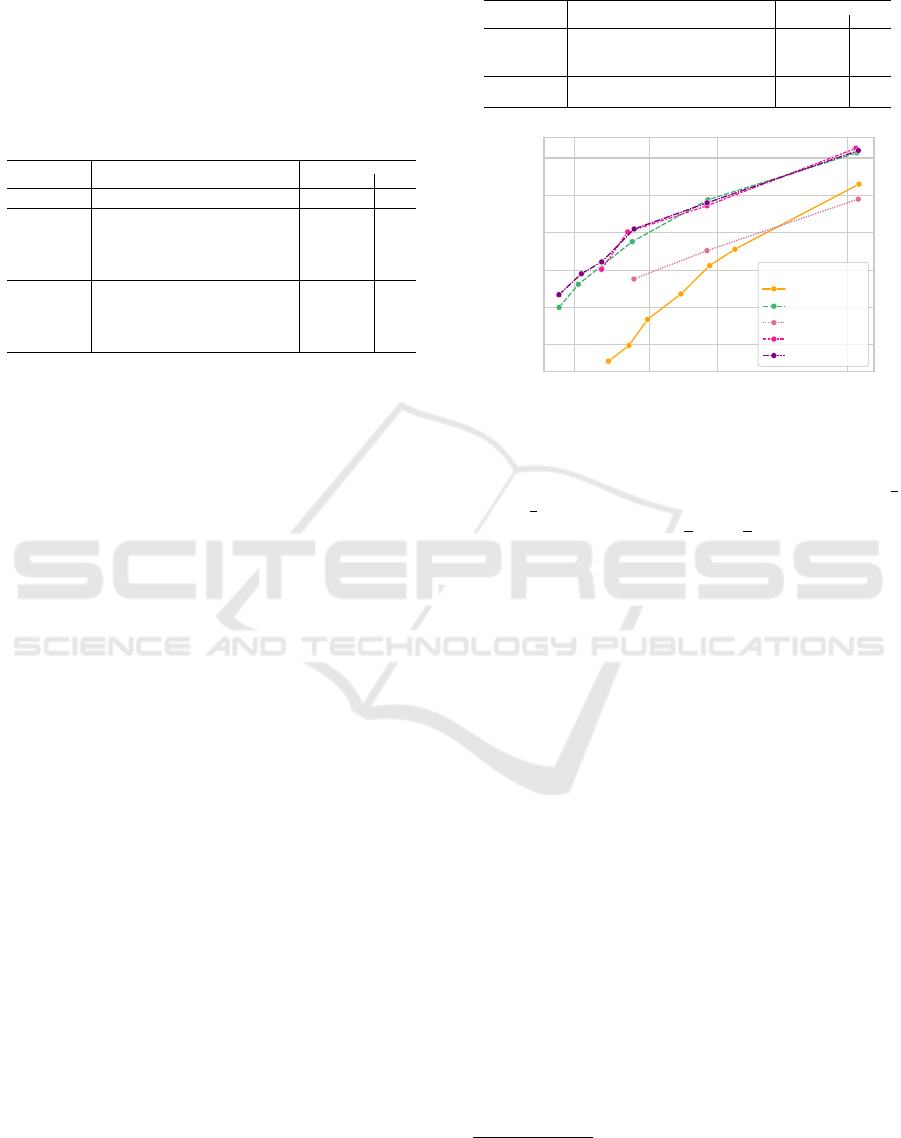
Table 3: Influence of ReLU and bn placement (cf.table 1) on
the accuracy of Poly-MgNet
q
2
and Poly-MgNet
g
4
trained on
CIFAR-10. The best accuracy for each model is highlighted
in bold. In the blocks corresponding to eq. (22) each ReLU
is followed by bn (first row). For Poly-MgNet
q
2
we con-
sider the naive placement of one ReLU before resolution
coarsening, i.e. after the polynomial q
2
cf. eq. (23), we con-
trast this to an additional bn after ReLU with bn after the
residual r (row 2, 3). For Poly-MgNet
g
4
we limit the shown
results to the one with highest accuracy.
Model bn
σu
(ν)
ℓ
bn σp
d−1
(A) bn σr
accuracy
test (±std) train
MgNet
A,B
95.94 (0.27) 97.60
Poly-MgNet
q
2
× × 65.27 (63.4) 64.61
× × × × 93.04 (0.19) 94.00
× × × × 94.38 (0.35) 96.54
× × × 94.89 (0.16) 97.03
× × × 94.71 (0.21) 94.71
Poly-MgNet
g
4
× × 94.65 (0.33) 96.70
× × × × 95.28 (0.19) 97.23
× × × × 95.02 (0.18) 97.13
× × × × 95.04 (0.09) 97.11
× × × 95.00 (0.18) 97.11
.
than MgNet
A,B
. Furthermore the naive approach with
a single ReLU and no additional bn (eq. (23)) (on one
resolution level) is not robust, cf. table 3. One out of
three experimental runs fails to learn, resulting in a
low average accuracy with high standard deviation. It
is well known that polynomials suffer from instabil-
ities with increasing degree. In our experiments, we
observed in general that higher polynomial degrees
(greater than eight) often led to instabilities. Poly-
nomials of moderate degree mostly achieved superior
accuracy.
In contrast to that, the same ReLU placement
paired with bn applied after the calculation of the
residual achieves the highest mean accuracy, cf. ta-
ble 3. Furthermore, we study the ReLU placement
in Poly-MgNet
g
4
, which is based on polynomials,
that are quadratic in the real valued term. Note that
g
4
= ˆg
4
according to eq. (21). This emphasize on the
real-valued part increases the accuracy by 0.4 percent-
age points (pp), cf. table 3.
Selected results for the ReLU placement in mod-
els with polynomials g
6
and g
8
are summarized in ta-
ble 4. Recall, that polynomials with d > 2, and
respectively d > 4 are composed of a real valued
part and an imaginary valued part w.r.t. their roots;
cf. eq. (18). Specifically, the composition of g
6
is
given by g
6
= ˆg
1
(A
2
) · ˆg
2
(A
2
) · ˜q
1
(A). For the ˆg-terms
the placement of ReLU and bn follows the optimal
configuration of g
4
determined in table 3.
We observe that for both Poly-MgNet
g
6
and Poly-
MgNet
g
8
that the application of ReLU and bn after the
residual update are essential for high accuracy.
Channel Scaling. After determining feasible set-
tings for the placements of ReLU and bn, we study
the influence of the capacity in terms of weights on
Table 4: Influence of ReLU and bn placement in Poly-
MgNet
g
6
and Poly-MgNet
g
8
on the accuracy.
Model bn
σu
(ν)
ℓ
bn σp
d−1
(A) bn σr
accuracy
test (±std) train
Poly-MgNet
g
6
× × × × 95.25 (0.41) 97.29
× × × × 95.55 (0.07) 97.34
× × × × 95.23 (0.13) 97.17
Poly-MgNet
g
8
× × × × 95.33 (0.33) 97.35
× × × × 95.60 (0.34) 97.4
0.8 1.6 3 10
Number of weights [M]
94.0
94.5
95.0
95.5
96.0
96.5
Accuracy (%)
Base Model
ResNet
MgNet
AB
Poly-MgNet
q
2
Poly-MgNet
g
4
Poly-MgNet
g
6
Figure 5: Accuracy-weight trade-off of ResNet and MgNet
models: influence of overall capacity of residual networks
on classification accuracy. The number of channels in the
residual blocks of ResNet and MgNet
A,B
are scaled by
1
/
√
2
and
1
/
√
8. In contrast, the channels of Poly-MgNet
q
d
are
rescaled by multiplying by
√
2 and
√
8.
the accuracy of our Poly-MgNet models. To this end,
we introduce a channel scaling parameter to increase
the number of weights in Poly-MgNet according to
the weight count of ResNet and MgNet. Respectively,
we scale the channels of ResNet and MgNet to meet
the capacity of Poly-MgNet. Specifically, the overall
initial number of channels
3
is multiplied by a channel
scaling parameter λ < 1, to reduce the overall weight
count to a target limit of 1.3M weights, which cor-
responds to the average weight count of polynomial
MgNet models. The results are depicted in fig. 5. A
regular ResNet18 has over 11M weights and achieves
an accuracy over 96%. Limiting the total weight
count to 1.3M – representing a reduction of more than
a factor 8 – results in an accuracy drop about 2 pp. In
contrast, the standard MgNet
A,B
with 2.7M weights
already achieves a reduction by a factor of 4 com-
pared to ResNet18 while maintaining competitive ac-
curacy. Despite the lower weight count, MgNet
A,B
still achieves an accuracy of 96%. When the weight
count of MgNet is reduced to 1.3M, we observe a loss
in accuracy of 0.6 pp. These findings highlight that,
compared to ResNet, the weight count can be drasti-
cally reduced without significantly affecting the per-
3
Initial number of channels in the residual blocks for
ResNet18 is [64,128,256,512] and [64, 128, 256,256] for
MgNet
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
189

formance in terms of accuracy.
Our initial Poly-MgNet utilizes around 1.3M
weights. With this capacity Poly-MgNet
q
2
achieves
an accuracy of 94.89%. Compared to ResNet18,
which has over 11M weights, this represents a re-
duction in weight count by a factor of more than
8.5, while sacrificing less than 1.5 pp of accuracy.
Poly-MgNet
g
4
and Poly-MgNet
g
6
achieve accuracies
over 95.5% with an initial capacity of approximately
1.4M weights, slightly improving the accuracy of
MgNet
A,B
by 0.13 pp while requiring identical capac-
ity. By increasing the number of channels for both
MgNet
A,B
and Poly-MgNet with building blocks g
4
and g
6
, all models achieve an accuracy of approx-
imately 96.60%, thereby drastically improving the
accuracy-weight trade-off compared to the standard
ResNet18.
5 CONCLUSION
In this work, we introduced Poly-MgNet, which com-
plements MgNet by a new network building block
inspired by polynomial MG smoothers. We con-
ducted comprehensive numerical studies on our build-
ing block, including baseline comparisons and several
ablations. More specifically, in comparison to MgNet
we found more favorable trade-offs between the num-
ber of weights in Poly-MgNet and the achieved ac-
curacy. In our ablation studies, we found that the
incorporation of multiple batch normalizations and
ReLU activation functions within a single building
block is crucial for achieving high accuracy, despite
the counterintuitive use of non-linearities in polyno-
mials. Additionally, we observed that building blocks
utilizing quadratic polynomials provide notable ben-
efits in terms of accuracy. We make our code for re-
production of all experiments publicly available under
https://github.com/vanbetteray/Poly-MgNet.
ACKNOWLEDGEMENTS
This work is partially supported by the German Fed-
eral Ministry for Economic Affairs and Climate Ac-
tion, within the project “KI Delta Learning” (grant
no. 19A19013Q). M.R. acknowledges support by the
German Federal Ministry of Education and Research
within the junior research group project “UnrEAL”
(grant no. 01IS22069). The contribution of K.K. is
partially funded by the European Union’s HORIZON
MSCA Doctoral Networks programme project AQTI-
VATE (grant no. 101072344).
REFERENCES
Cha, S., Kim, T., Lee, H., and Yun, S.-Y. (2022). Super-
net in neural architecture search: A taxonomic survey.
ArXiv, abs/2204.03916.
Changpinyo, S., Sandler, M., and Zhmoginov, A. (2017).
The Power of Sparsity in Convolutional Neural Net-
works. ArXiv.
Chrysos, G. G., Moschoglou, S., Bouritsas, G., Deng, J.,
Panagakis, Y., and Zafeiriou, S. (2022). Deep polyno-
mial neural networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 44(8):4021–4034.
Chrysos, G. G., Moschoglou, S., Bouritsas, G., Panagakis,
Y., Deng, J., and Zafeiriou, S. (2020). P-nets: Deep
polynomial neural networks. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In Interna-
tional Conference on Learning Representations.
Eliasof, M., Ephrath, J., Ruthotto, L., and Treister, E.
(2020). Mgic: Multigrid-in-channels neural network
architectures. SIAM J. Sci. Comput., 45:S307–S328.
Elsken, T., Metzen, J. H., and Hutter, F. (2019). Neural
architecture search: A survey. J. Mach. Learn. Res.,
20(1):1997–2017.
Gale, T., Elsen, E., and Hooker, S. (2019). The state of spar-
sity in deep neural networks. CoRR, abs/1902.09574.
Glorot, X. and Bengio, Y. (2010a). Understanding the dif-
ficulty of training deep feedforward neural networks.
In International Conference on Artificial Intelligence
and Statistics.
Glorot, X. and Bengio, Y. (2010b). Understanding the diffi-
culty of training deep feedforward neural networks. In
Teh, Y. W. and Titterington, M., editors, Proceedings
of the Thirteenth International Conference on Artifi-
cial Intelligence and Statistics, volume 9 of Proceed-
ings of Machine Learning Research, pages 249–256,
Chia Laguna Resort, Sardinia, Italy. PMLR.
Gordon, A., Eban, E., Nachum, O., Chen, B., Yang, T.-
J., and Choi, E. (2017). Morphnet: Fast & simple
resource-constrained structure learning of deep net-
works. 2018 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition, pages 1586–1595.
G
¨
otz, M. and Anzt, H. (2018). Machine learning-aided
numerical linear algebra: Convolutional neural net-
works for the efficient preconditioner generation. In
2018 IEEE/ACM 9th Workshop on Latest Advances in
Scalable Algorithms for Large-Scale Systems (scalA),
pages 49–56.
Han, S., Pool, J., Narang, S., Mao, H., Gong, E., Tang, S.,
Elsen, E., Vajda, P., Paluri, M., Tran, J., Catanzaro,
B., and Dally, W. (2017). DSD: Dense-Sparse-Dense
Training for Deep Neural Networks. ICLR.
Han, S., Pool, J., Tran, J., and Dally, W. (2015). Learn-
ing both Weights and Connections for Efficient Neural
Network. NIPS.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
190

Hassibi, B. and Stork, D. (1992). Second order derivatives
for network pruning: Optimal brain surgeon. In Han-
son, S., Cowan, J., and Giles, C., editors, Advances
in Neural Information Processing Systems, volume 5.
Morgan-Kaufmann.
He, J. and Xu, J. (2019). MgNet: A unified framework of
multigrid and convolutional neural network. Science
China Mathematics, 62(7):1331–1354.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving
Deep into Rectifiers: Surpassing Human-Level Per-
formance on ImageNet Classification. In 2015 IEEE
International Conference on Computer Vision (ICCV),
pages 1026–1034, Santiago, Chile. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016a). Deep
Residual Learning for Image Recognition. In 2016
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 770–778. ISSN: 1063-
6919.
He, K., Zhang, X., Ren, S., and Sun, J. (2016b). Identity
mappings in deep residual networks. In Leibe, B.,
Matas, J., Sebe, N., and Welling, M., editors, Com-
puter Vision – ECCV 2016, pages 630–645, Cham.
Springer International Publishing.
Howard, A., Sandler, M., Chen, B., Wang, W., Chen, L.-
C., Tan, M., Chu, G., Vasudevan, V., Zhu, Y., Pang,
R., Adam, H., and Le, Q. (2019). Searching for Mo-
bileNetV3. In 2019 IEEE/CVF International Confer-
ence on Computer Vision (ICCV), pages 1314–1324,
Seoul, Korea (South). IEEE.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam, H.
(2017). MobileNets: Efficient Convolutional Neural
Networks for Mobile Vision Applications. ArXiv.
Kahl, K. (2009). Adaptive Algebraic Multigrid for Lattice
QCD Computations. PhD thesis, Wuppertal U.
Katrutsa, A., Daulbaev, T., and Oseledets, I. (2017). Deep
multigrid: learning prolongation and restriction matri-
ces. arXiv: Numerical Analysis.
Ke, T.-W., Maire, M., and Yu, S. X. (2017). Multigrid neu-
ral architectures. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
4067–4075.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. In Advances in Neural Information Pro-
cessing Systems, volume 25. Curran Associates, Inc.
Lee, N., Ajanthan, T., and Torr, P. (2019). SNIP: SINGLE-
SHOT NETWORK PRUNING BASED ON CON-
NECTION SENSITIVITY. In International Confer-
ence on Learning Representations.
Li, H., Kadav, A., Durdanovic, I., Samet, H., and Graf, H. P.
(2017). Pruning filters for efficient convnets. In Inter-
national Conference on Learning Representations.
Liu, Z., Mao, H., Wu, C.-Y., Feichtenhofer, C., Darrell, T.,
and Xie, S. (2022). A convnet for the 2020s. In 2022
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 11966–11976.
Loshchilov, I. and Hutter, F. (2017). SGDR: Stochastic Gra-
dient Descent with Warm Restarts. arXiv:1608.03983
[cs, math].
Molchanov, P., Tyree, S., Karras, T., Aila, T., and Kautz,
J. (2016). Pruning convolutional neural networks for
resource efficient transfer learning.
Oh, S.-K., Pedrycz, W., and Park, B.-J. (2003). Polynomial
neural networks architecture: analysis and design.
Computers & Electrical Engineering, 29(6):703–725.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
PyTorch: An Imperative Style, High-Performance
Deep Learning Library. 33rd Conference on Neural
Information Processing Systems (NeurIPS 2019).
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
geNet Large Scale Visual Recognition Challenge. In-
ternational Journal of Computer Vision, 115(3):211–
252.
Saad, Y. (2003). Iterative Methods for Sparse Linear Sys-
tems. Society for Industrial and Applied Mathematics,
second edition.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). MobileNetV2: Inverted Residu-
als and Linear Bottlenecks . In 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 4510–4520, Los Alamitos, CA, USA.
IEEE Computer Society.
Shalev-Shwartz, S. and Ben-David, S. (2014). Understand-
ing machine learning: from theory to algorithms.
Cambridge University Press, New York, NY, USA.
Shin, Y. and Ghosh, J. (1991). The pi-sigma network: an
efficient higher-order neural network for pattern clas-
sification and function approximation. In IJCNN-91-
Seattle International Joint Conference on Neural Net-
works, volume i, pages 13–18 vol.1.
Tomasi, C. and Krause, R. (2021). Construction of grid
operators for multilevel solvers: a neural network ap-
proach. arXiv preprint arXiv:2109.05873.
Treister, E. and Yavneh, I. (2011). On-the-Fly Adaptive
Smoothed Aggregation Multigrid for Markov Chains.
SIAM J. Scientific Computing, 33:2927–2949.
Trottenberg, U., Oosterlee, C. W., and Sch
¨
uller, A. (2001).
Multigrid. Academic Press, San Diego.
van Betteray, A., Rottmann, M., and Kahl, K. (2023).
Mgiad: Multigrid in all dimensions. efficiency and ro-
bustness by weight sharing and coarsening in resolu-
tion and channel dimensions. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV) Workshops, pages 1292–1301.
Xie, S., Girshick, R., Dollar, P., Tu, Z., and He, K. (2017).
Aggregated Residual Transformations for Deep Neu-
ral Networks. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 5987–
5995, Honolulu, HI. IEEE.
Zhang, X., Zhou, X., Lin, M., and Sun, J. (2018). Shuf-
fleNet: An Extremely Efficient Convolutional Neu-
ral Network for Mobile Devices. In 2018 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 6848–6856. ISSN: 2575-7075.
Poly-MgNet: Polynomial Building Blocks in Multigrid-Inspired ResNets
191
