
Handwriting Trajectory Recovery of Latin Characters with Deep
Learning: A Novel Exploring the Amount of Points per Character
and New Evaluation Method
Simone Bello Kaminski Aires
a
, Erikson Freitas de Morais
b
and Yu Han Lin
c
Department of Computing, Federal Technology University of Parana, Washington Subtil Chueire, Ponta Grossa, Brazil
Keywords: Deep Learning, Handwriting Trajectory Recovery, Handwriting Reconstruction.
Abstract: The research on handwriting trajectory recovery (HTR) has gained prominence in offline handwriting
recognition by utilizing online recognition resources to simulate writing patterns. Traditional approaches
commonly employ graph-based methods that skeletonize characters to trace their paths, while recent studies
have focused on deep learning techniques due to their superior generalization capabilities. However, despite
promising results, the absence of standardized evaluation metrics limits meaningful comparisons across
studies. This work presents a novel approach to recovering handwriting trajectories of Latin characters using
deep learning networks, coupled with a standardized evaluation framework. The proposed evaluation model
quantitatively and qualitatively assesses the recovery of stroke sequences and character geometry, providing
a consistent basis for comparison. Experimental results demonstrate the significant influence of the number
of coordinate points per character on deep learning performance, offering valuable insights into optimizing
both evaluation and recovery rates. This study provides a practical solution for enhancing HTR accuracy and
establishing a standardized evaluation methodology.
1 INTRODUCTION
Handwriting recognition involves transforming
handwritten graphical marks into digital signals,
enabling the interpretation of unique individual
writing styles (Plamondon and Srihari, 2000).
However, the variability in handwriting presents
significant challenges, particularly in generalizing
across different scripts and languages. Neural
networks have shown considerable potential in
addressing these challenges by learning to adapt to
diverse styles and input formats (Xiong, Dai, and
Meng, 2023; Gautam and Singh, 2022; Shaji, Shoba,
Jemimma, and Chester, 2023). Nevertheless, offline
handwriting recognition remains less accurate than
online recognition due to the lack of temporal and
dynamic information (Zhang, Bengio, and Liu, 2017).
To overcome this limitation, handwriting
trajectory recovery (HTR) systems have been
developed to reconstruct the temporal order of strokes
a
https://orcid.org/ 0000-0003-3346-2693
b
https://orcid.org/ 0000-0002-0845-7457
c
https://orcid.org/ 0000-0002-4905-5462
from static images, providing dynamic information
that helps distinguish characters with similar
geometric forms (Noubigh and Kherallah, 2016).
Traditional HTR methods often rely on heuristic
approaches, such as graph-based skeletonization and
greedy algorithms, to approximate handwriting
trajectories (Dinh, Yang, Lee, Kim and Do, 2016).
Although these methods can be effective for simpler
cases, they lack the flexibility required to manage the
complexity and variability inherent in handwriting.
Deep learning techniques, including
Convolutional Neural Networks (CNNs) and Long
Short-Term Memory (LSTM) networks, have
significantly advanced the field of HTR by leveraging
their generalization capabilities to predict stroke
sequences from static handwriting images (Singh,
Rohilla and Sharma, 2024; Jayanna, Nagaraja,
Yadava, Deekshith, Seelam and Jamkhandi, 2024;
Lv, 2023; Qu, 2024). Recent studies have
demonstrated the successful integration of CNNs
with LSTMs to predict coordinate points, achieving
Aires, S. B. K., Freitas de Morais, E. and Lin, Y. H.
Handwriting Trajectory Recovery of Latin Characters with Deep Learning: A Novel Exploring the Amount of Points per Character and New Evaluation Method.
DOI: 10.5220/0013383100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
855-862
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
855

promising results (Zhao, Yang, and Tao, 2019;
Zhang, Bengio and Liu, 2017; Wang, Sonogashira,
Hashimoto and Iiyama, 2019; Elbaati, Hamdi and
Alimi, 2019). However, the absence of standardized
evaluation methods is a limitation, as current research
relies on diverse proprietary metrics or statistical
coefficients with non-uniform thresholds (Kumar,
Bhowmick, Bhunia, Konwer, Banerjee, Roy and Pal,
2018; Zhao, Yang and Tao, 2019; Elbaati, Hamdi and
Alimi, 2019). This inconsistency hinders the
comparability of results across different HTR
systems.
In this context, the present study introduces a
novel HTR approach leveraging deep learning,
specifically targeting Latin lowercase characters from
the IRONOFF dataset. Unlike existing methods, this
work proposes a standardized evaluation framework
to assess the accuracy of predicted trajectories,
enabling consistent and comparable analyses.
Furthermore, the study systematically examines the
impact of varying the number of coordinate points per
character on model performance, offering valuable
insights for optimizing trajectory recovery and
evaluation methodologies.
The remainder of this paper is organized as
follows: Section 2 reviews related work on HTR,
Section 3 details the methodology and experimental
setup, Section 4 discusses the proposed evaluation
framework, Section 5 presents results and analysis,
and Section 6 concludes and future directions.
2 RELATED WORKS
Handwriting trajectory recovery (HTR) methods can
be broadly categorized into two main approaches:
heuristic algorithms and artificial
intelligence/machine learning-based techniques.
Heuristic algorithms, such as skeletonization and
graph-based pathfinding, have been widely utilized to
approximate handwriting trajectories (Noubigh and
Kherallah, 2016; Nguyen and Blumenstein, 2010).
Prominent examples include the use of Euclidean
path optimization in undirected graphs (Nagoya and
Fujioka, 2011) and code chain algorithms to recover
trajectories from character skeletons (Sharma, 2013).
Subsequently, (Sharma, 2015) extended this
approach by integrating dynamic and static features,
significantly improving handwriting recognition
performance.
Genetic algorithms have also been employed to
optimize trajectory paths, as demonstrated by
(Elbaati, Kherallah, Ennaji and Alimi, 2009), who
restored stroke chronology for Arabic handwriting
recognition. More recently (Jin, Ran, Yuan, Lv,
Wang and Xiao, 2024) introduced the Bagging in
Hidden Semi-Markov Model (BHSMM) algorithm,
which partitions demonstration data into sub-datasets,
encodes them using Hidden Semi-Markov Models
(HSMM), and derives task-specific weights to
enhance trajectory accuracy and robustness.
Deep learning has emerged as a transformative
approach in HTR, leveraging convolutional neural
networks (CNNs) and recurrent neural networks
(RNNs) for feature extraction and sequence
prediction. In work present by (Zhao, Yang and Tao,
2019) are developed a dual-CNN architecture to
extract static and dynamic writing energies,
combining them to recover the drawing order.
Similarly (Wang, Sonogashira, Hashimoto and
Iiyama, 2019) utilized a hybrid strategy with CNNs
and graph-cut algorithms to refine stroke order in
Chinese characters. Both approaches highlight the
integration of deep learning with heuristic techniques
to enhance performance.
Fully deep learning-based methods have also been
explored (Kumar, Bhowmick, Bhunia, Konwer,
Banerjee, Roy and Pal, 2018) proposed a CNN-
LSTM framework to generalize dynamic feature
learning across scripts, while (Elbaati, Hamdi and
Alimi, 2019) utilized a VGG-16 combined with a
beta-LSTM for trajectory recovery. However, these
studies lack consistent evaluation metrics, relying on
statistical measures such as Dynamic Time Warping
(DTW) and Root Mean Square Error (RMSE), which
require arbitrary thresholds. Others, like (Kumar,
Bhowmick, Bhunia, Konwer, Banerjee, Roy and Pal,
2018), adopted parameters from (Rousseau, Anquetil
and Camillerapp, 2005), or bypassed these metrics
entirely by integrating predicted trajectories into
online recognizers (Elbaati, Hamdi and Alimi, 2019).
While these methods represent significant
advancements, the lack of a standardized evaluation
framework hinders comparability across studies. To
address this limitation, our approach proposes a
universal evaluation system capable of assessing both
the geometric accuracy of predicted characters and
the correctness of coordinate sequences. This
framework ensures applicability and enhances the
reliability and consistency of HTR evaluations.
3 METODOLOGY
This section outlines the process of converting offline
data into online trajectories, detailing the dataset,
preprocessing, neural network architecture, training
process, and evaluation methods. The proposed deep
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
856
neural network was inspired by the architecture
proposed by (Kumar, Bhowmick, Bhunia, Konwer,
Banerjee, Roy and Pal, 2018). We use their HTR
system as a start point experiment to perform the
handwriting recovery and develop our own deep
learning network to recover the handwriting
characters trajectory to make a benchmark.
3.1 Dataset
For the handwriting trajectory recovery task in this
work, the dataset must have both on/off information.
The experiments of this work are carried on the online
data of Latin IRONOFF (Viard-Gaudin, Lallican,
Knerr and Binter, 2015), the images are the drawings
of online coordinates.
The IRONOFF database contains both on-line and
offline information for each character. It’s composed
by 4.086 isolated digits and 21.364 isolates
characters. Our experiments only use the single
strokes of those isolates characters, which constitutes
a quantity of 10.685 characters. Seven datasets with
different levels of granularity were created, varying
the number of points per character to 20, 30, 40, 50,
60, 70, and 100 points.
3.2 Pre-Process
As mentioned before, we only use the on-line data
from the database, more specifically, the (x, y)
coordinates. The pre-processing stage are done in
those coordinates, and is following by three main
step: resizing, normalization and data augmentation.
3.2.1 Resizing
The goal is to resize the characters to 64x64. First, the
region of interest is translated by shifting the main
character to the origin (0, 0). This is achieved by
subtracting the smallest coordinate value from all
coordinate values.
Afterward, the resizing is computed as follows.
Assuming C represents all the coordinates of a
character and C(xi,yi) is a single coordinate from C,
the scaling ratios for the x and y axes are rx=W/64r
and ry=H/64, where W and H are the highest
coordinate values along the x and y axes. The new
coordinates are then calculated using Equation 1.
(1)
With that, the coordinates will be within the
limit of 64x64.
3.2.2 Normalization
In this phase, we want to standardize the amount of
the coordinates (x, y) of all samples. By applying the
Bresenham Algorithm (Bresenham, 1965), we
generate new points by connecting two coordinates.
We do this to all the coordinate pairs, this will
create the skeleton of the character. Then, the points
are sampled uniformly over the complete skeleton
trajectory by 20, 30, 40, 50, 60 and 70 points (points
per character). This will produce seven different
databases, each one will feed their own deep neural
network, that are used in the experiments.
3.2.3 Data Augmentation
Deep learning neural networks require large datasets
to achieve effective generalization (LeCun, Bengio,
and Hinton, 2015). Data augmentation enhances
dataset size and quality by applying transformations
to images, improving the network's performance
(Shorten and Khoshgoftaar, 2019).
For handwriting trajectory recovery (HTR),
careful selection of augmentation algorithms is
crucial to avoid harming the learning process.
Techniques like random erasing are unsuitable due to
limited data points, while transformations such as
color adjustments or noise injection are irrelevant due
to pre-processed, binarized images. Slight rotations,
however, are effective for character recognition tasks,
as they introduce variability in the dataset by rotating
samples between 1° and 359° (Shorten and
Khoshgoftaar, 2019). For HTR, this involves rotating
data points within each sample to enhance learning.
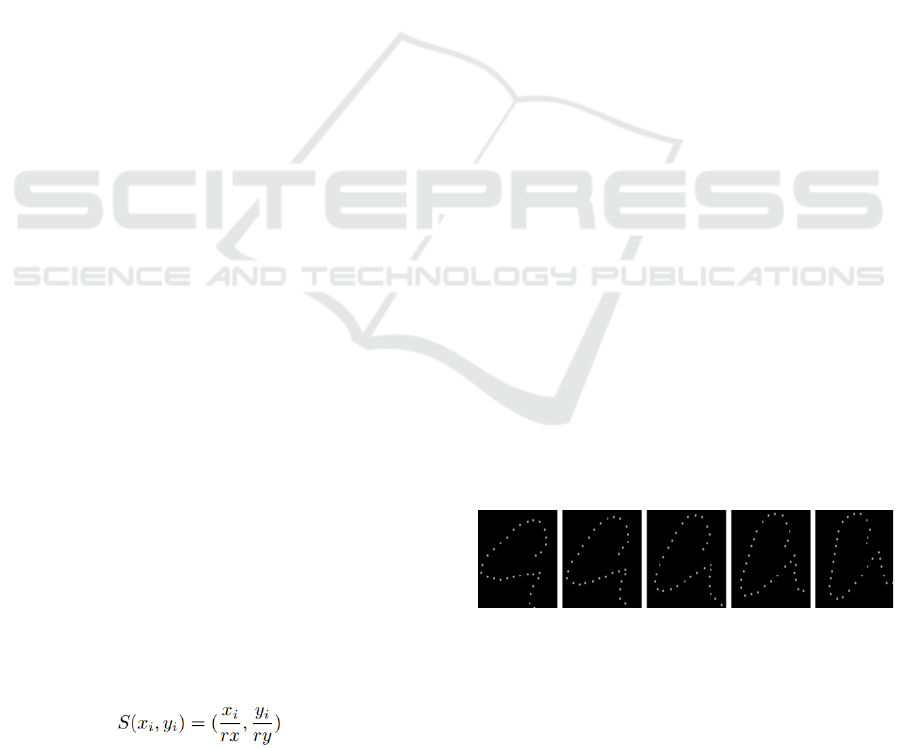
In Figure 1, the coordinates are drawn for
visualize the effect of rotation. We apply the rotation
on an central axis in four different angles: 30◦, 15◦,
−15◦ and −30◦ (1). With the original sample at 0◦, we
expand the dataset in five times compared the original
data amount.
Figure 1: Illustration of Rotation Augmentation.
3.3 Deep Neural Network
The two main networks used in this work are the
combination of CNN and Encoder- Decoder LSTM,
with a fully connected network with one layer and
two output. The offline images is the input of the
CNN, which have has main task extract the high level
Handwriting Trajectory Recovery of Latin Characters with Deep Learning: A Novel Exploring the Amount of Points per Character and New
Evaluation Method
857
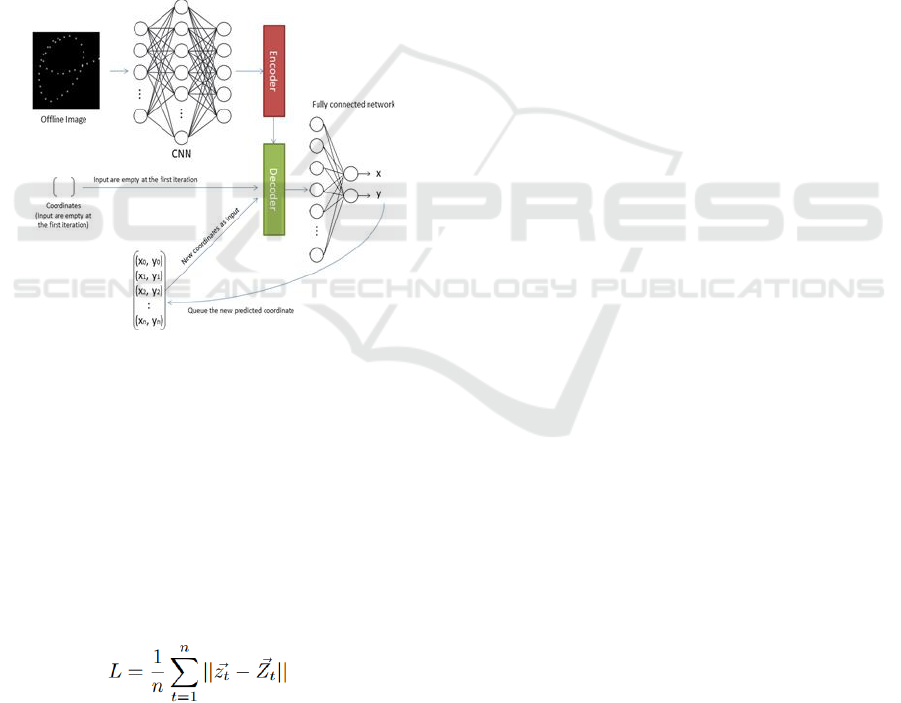
features of the characters. The set of features
extracted from the CNN are the high-level
representation of the trajectory of the character, that
are the input of the encoder-decoder LSTM network.
The encoder-decoder LSTM network will interpret
and translate the features in a dependency string,
which are the input of a fully connected layer, that
will produce the (x, y) coordinates (Figure 2).
In Figure 2, are presented the coordinates
prediction are done by a set of iterations. For each
iteration, a new coordinate is predicted and queued
behind the coordinates that are already has been
predicted. At the beginning, the set of coordinates are
empty. The second iteration already have the
coordinate of the first iteration, so the Decoder LSTM
will know that he has to predict the next coordinate
following.
Figure 2: CNN and Encoder-Decoder LSTM.
The numbers of iterations are the number of points
of the dataset. The main reason to normalize the
dataset to a fixed number of points is to increase the
learning process. If the network has to learn different
number of points from each sample, different weights
of the Decoder LSTM network will needed to be
refreshed; if the amount of points are the same, the
same weights for all samples are used.
We use the L1 distance to compute the fitness of
the network as follows:
(2)
In Equation 2, where 𝑧
𝑡
⃗
⃗
⃗
is the predicted
coordinate, 𝑍
𝑡
⃗
⃗
⃗
is the ground-truth coordinate and n
the amount of points of each sample.
3.3.1 Networks Parameters
We explore some variations of (Kumar, Bhowmick,
Bhunia, Konwer, Banerjee, Roy and Pal, 2018)
network by adding layers in both CNN and Encoder-
Decoder LSTM. We reach results that better fit for the
HTR problem on latin characters.
The network proposed by (Kumar, Bhowmick,
Bhunia, Konwer, Banerjee, Roy and Pal, 2018) have
six convolutional layers (CL) and two bidirectional
layers in each Encoder-Decoder LSTM, we call
netBh. Four additional configurations are tested in the
experiments. We call them net-v1, net-v2, net-v3 and
net-v4, respectively.
• netBh: 6 CL and 2 LSTM layers.
• net-v0: 6 CL and 3 LSTM layers.
• net-v1: 8 CL and 3 LSTM layers.
• net-v2: 12 CL and 3 LSTM layers.
• net-v3: 16 CL and 3 LSTM layers.
These architectures were tailored to determine the
effectiveness of deeper networks in processing
datasets with higher point densities per character.
3.3.2 Implementation Details
All the experiments are conducted on a serve with
Nvidia Ge-Force GTX Titan 6GB, i7-3770K CPU
and 8GB of memory. All coding with Python and the
Tensorflow framework.
The networks are trained with 200 epoch with
cross-validation. Samples are divided in 70%
training, 15% validation and 15% for test. The time
of training is directly proportional to the amount of
points of the dataset.
3.4 Evaluation Method
Evaluation methods in the literature often use
statistical metrics such as DTW, RMSE, and Pearson
Correlation to measure the similarity between
predicted coordinates and ground truth. While these
metrics indicate geometric similarity, they rely on
arbitrary thresholds that affect final accuracy, leading
to inconsistent results. Some metrics also include
stroke direction evaluation, but they lack
standardization.
The evaluation method described by (Kumar,
Bhowmick, Bhunia, Konwer, Banerjee, Roy and Pal,
2018) is less inconstant than those mentioned before.
By formalizing the first evaluation proposed by
(Rousseau, Anquetil and Camillerapp, 2005), the
metric can compute the accuracy by:
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
858

• Starting Point (SP): Evaluates whether the
starting point of the sequence is correctly
predicted.
• Junction Points (JP): Measures accuracy in
determining the entry and exit paths at junction
points.
• Complete Trajectory (CT): Verifies if the entire
trajectory, including the starting point, is
correctly predicted.
Before applying those metrics, (Kumar,
Bhowmick, Bhunia, Konwer, Banerjee, Roy and Pal,
2018) also translate the output coordinate points of
the network to the nearest point on the ground truth
skeleton as a post processing step. In the research for
a standard evaluation measure, we could deduce that
the last one has a better potential to reflect the better
accuracy for the predicted results. However, in a
qualitative analysis, the experiments show the
inconsistency of the metric by assigns false positives
and false negatives to the predicted coordinate
sequence. The reason of these factors will be
described below.
Figure 3: Trajectory of the ’e’ character.
In Figure 3, the predicted trajectory (blue) has
been a little bit deviate from the ground-truth (green).
First of all, the post processing step is inaccurate. We
can see the case illustrated at Figure 3. The translation
step translates the crossing coordinates (indicated in
red) wrongly. We can see that the third coordinate are
not translated to the correct place, and it will be
considered a wrong prediction by the evaluation
method. But the prediction are not wrong, it just a
little bit deviated. This is a case of false negative and
occurs with various predicted samples.
Figure 4: Trajectory of the ’p’ character.
In the learning process, the network received a
specific coordinate order to learn. The test sample are
the same character, but the coordinate points are
ordered in the opposite order. The network can
predict what he learned and can estimate the
geometric form of the character. The coordinate
points sequence are inverse, but it is still a right
prediction. The example is show at Figure 4.
Translating the predicted points to the nearest
ground-truth coordinates can severely distort the
geometric shape of the predicted trajectory, leading to
an incorrect relationship between the prediction and
ground truth, as shown in Figure 5. This results in a
false positive, where the evaluation method classifies
the prediction as correct due to the correct stroke
direction, even though the geometric shape of the
character is inaccurate.
Figure 5: Trajectory of the ’r’ character.
By analysis the samples, the need of a precise
evaluation method to evaluate HTR deep learning
systems was noted. The last method mentioned
compute 15% samples of the test dataset incorrectly
(false positives and negatives), so the final accuracy
of the network are not accurate enough. The next
section, we will present a new evaluation method that
overcome the current scenario of the reliability lack
from HTR evaluation accuracy.
3.5 Proposed Evaluation Method
In this section, we present our proposed evaluation
method to evaluate the HTR deep learning systems.
To compute the evaluation of a HTR system, the
predicted online points have to be compared with the
online ground truth. Since the deep learning networks
prediction are slightly deviated from the ground-truth,
the comparison with them become a not simple task.
Our method can overcome this situation by using a
kernel to combine the predicted coordinate with the
ground-truth skeleton and output the correct result.
The evaluation process is described below.
The ground-truth skeleton is divided into N
segments, where the choice of N significantly impacts
the character's geometric representation. A high N
Handwriting Trajectory Recovery of Latin Characters with Deep Learning: A Novel Exploring the Amount of Points per Character and New
Evaluation Method
859

value minimizes the impact of removing a single
segment, preserving the character's shape, while a
low N value causes greater deformation, potentially
rendering the character unrecognizable. Therefore, N
directly affects the final accuracy. Experiments reveal
that the higher the points per character (p/c), the
higher the N value required. A ratio between p/c and
N is established using a defined computation method,
as outlined in the Equation 3.
(3)
In Equation 3, N is the number of segments a
character will be divided into, and p/c denotes the
number of points per character. The floor function is
applied to convert the result into the largest integer
less than or equal to the computed value.
Once segmentation is complete, the character's
geometric form is evaluated by checking if the
predicted coordinates align with the ground-truth
coordinates. This is done using a kernel-based
technique, where the kernel slides along the ground-
truth skeleton to verify the presence of predicted
points in each segment. While Zhao, Yang, and Tao
(2019) use kernels referred to as top-1, top-5, and top-
10, this work employs a 5x5 kernel, equivalent to top-
25, to accommodate the larger image sizes used here.
The process, illustrated in Figure 6, ensures a
comprehensive evaluation of predicted trajectories.
In Figure 6, the white dots represent the predicted
coordinate points outputted by the deep neural
network. Each segment is colored by better
visualization. If the kernel found a predicted point,
the segment that the kernel is following is considered
predicted. If one of the segments of the character are
not predicted (in other words, no predicted points
were found in the sliding kernel covered area), means
that the network failed to predict the character.
Figure 6: 5x5 Kernel sliding the skeleton ground-truth.
The evaluation process ensures that predicted
points cover all segments of the original skeleton. If a
predicted point overlaps with two segments, it is
assigned to the segment that lacks a predicted point.
Once all segments are covered, the predicted points
are evaluated for their order.
As shown in Figure 7, segments are evaluated for
correct ordering by checking if at least one predicted
point from each segment aligns with the segment’s
sequence order. If such a combination exists, the
prediction order is considered correct. Multiple
combinations of predicted points and segments may
be valid.
Figure 7: Segments ordering.
In Figure 7, white dots represent predicted
coordinate points, and arrows illustrate an example of
correct ordering identified by the method. A
prediction is considered correct if it covers the
geometric shape of all segments from the ground-
truth skeleton and preserves the correct order of these
segments. This approach resolves the false positives
and false negatives identified in earlier methods.
4 RESULTS
We evaluate our system by using the existing
evaluation method (Complete Trajectory - CT) and
the proposed evaluation method. The metrics are
applied in all the data sets generated by the pre-
processing step. Table 1 and 2 show the accuracy of
the outputs from the network configuration of
(Kumar, Bhowmick, Bhunia, Konwer, Banerjee, Roy
and Pal, 2018) in all seven data sets.
Table 1: Accuracy from evaluation methods – part 1.
20p/c
30p/c
40p/c
Evaluation CT
84,6%
79,2%
71,9%
Proposed
91,4%
91,6%
8
7,8%
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
860
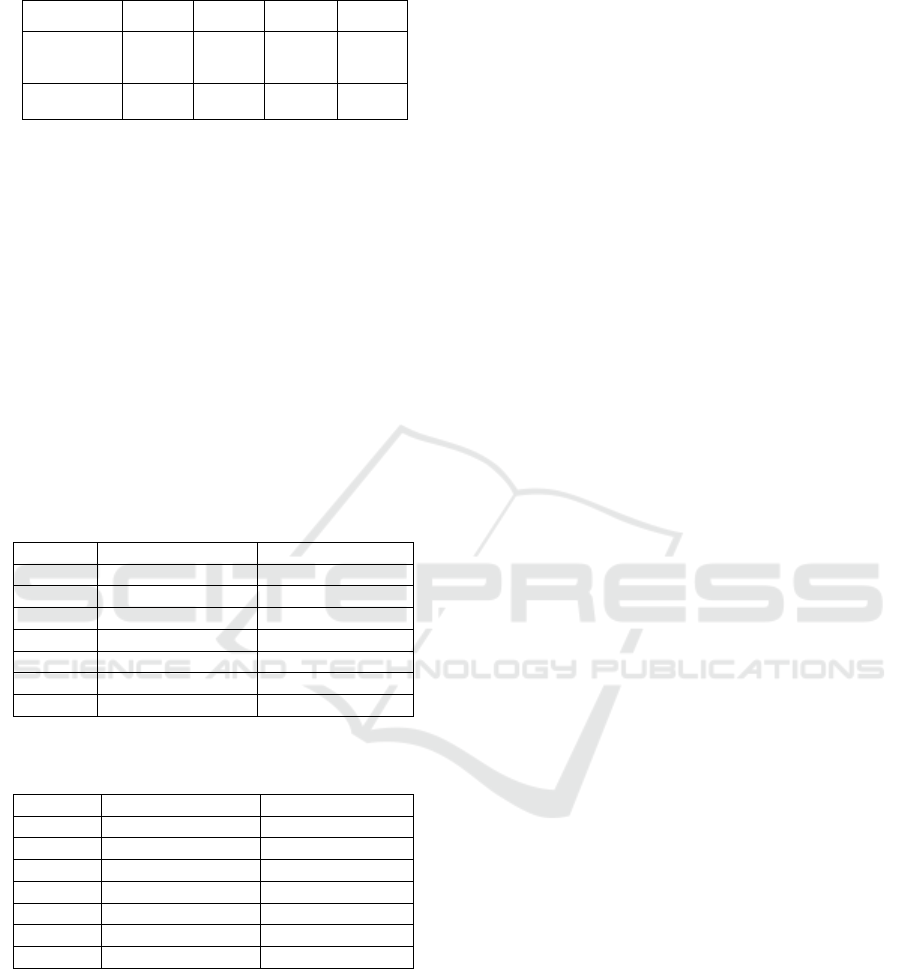
Table 2: Accuracy from evaluation methods – part 2.
50p/c
60p/c
70p/c
100p/c
Evaluation
CT
67,8%
56,1%
49,3%
32,0%
Proposed
86,0%
83,7%
79,5%
39,7%
The proposed evaluation can correct the false
positives and false negatives generated by the CT
method. The results show that the predictions are
quite better with our evaluation method. Six of seven
data sets show a very significant amount of
improvement. In the CT evaluation, the 20p/c and
70p/c have a difference of 36 points percentage, while
our evaluation method have only 12 points. Such
difference means that the CT evaluation doesn’t
compute with efficiency the predicted coordinates
with more points per character.
The Table 3 and Table 4 show all the network
developed in this work in all data sets in the two
evaluation methods.
Table 3: Accuracy from evaluation methods off all
networks – part 1.
Dat Set
net-v1
net-2
20p/c
85,29% - 90,75%
85,17% - 95,31%
30p/c
79,20% - 94,34%
81,18% - 95,14%
40p/c
74,33% - 92,51%
72,27% - 91,06%
50p/c
68,02% - 88,56%
66,42% - 87,97%
60p/c
60,84% - 86,59%
54,84% - 85,95%
70p/c
46,02% - 83,02%
55,04% - 86,93%
100p/c
29,87% - 44,82%
39,55% - 45,13%
Table 4: Accuracy from evaluation methods off all
networks – part 2.
Dat Set
net-v3
net-v4
20p/c
85,01% - 90,79%
81,89% - 85,17%
30p/c
79,23% - 92,39%
76,00% - 76,97%
40p/c
73,05% - 89,86%
67,81% - 76,42%
50p/c
64,11% - 86,46%
57,92% - 65,75%
60p/c
56,19% - 81,01%
51,57% - 59,24%
70p/c
48,37% - 78,27%
44,68% - 50,36%
100p/c
25,70% - 45,45%
25,28% - 23,29%
Is noticeable the accuracy difference between the
evaluations. We have improve the accuracy
considerably for the 70p/c data set in the net-v1, net-
v2 and net-v3 networks. Besides that, we show that
by resizing the amount of points per character and by
providing the network the right number of layers of
the network, the HTR can achieve better results, as
shown the result by 20p/c on net-v2 network.
5 CONCLUSION
The paper introduces a new evaluation method for
HTR systems that are more accurate comparing the
existing method. The proposed method utilizes the
kernel sliding system that can check if the predicted
points estimate the geometric form of the original
character, and the segmentation system simplifies the
evaluation of trajectory order sequence. The
experiments on the IRONOFF database also shown
that by normalizing and resizing the amount of points
per character can facilitate the network learning. Our
better results lay on the net-v2 on 20p/c, which
achieve 95,31% of accuracy.
Our great achieve it’s we provide a huge
improvement in the accuracy by proposing a more
efficient evaluation system, and a system to improve
the learning rate of the network, which is a important
and very challenge topic. Our network and evaluation
method effectively recover the trajectory of
handwriting from offline images of Latim characters.
In conclusion, Handwriting Trajectory Recovery
(HTR) is a key advancement in handwriting
recognition, transforming static images into dynamic
temporal data. Its versatility spans handwriting
recognition, robotic writing, historical manuscript
preservation, accessibility, and forensic analysis. By
recovering stroke sequences and geometric
structures, HTR enhances accuracy and enables
applications in multilingual systems and digital
design. Continued improvements in HTR methods
and evaluation will further expand its impact,
addressing complex handwriting challenges with
greater precision and adaptability.
ACKNOWLEDGEMENTS
The research leading to these results has received
support from the CAPES, Araucaria Foundation and
UTFPR-PG.
REFERENCES
Bresenham, J. E. (1965). Algorithm for computer control of
a digital plotter. IBM Systems Journal, 4(1), 25–30.
https://doi.org/10.1147/sj.41.0025
C. Shaji, V. Betcy Thanga Shoba, T. Jemimma, J. Robert
Edwin Chester (2023). Handwriting Recognition Using
Artificial Intelligence with Neural Network. ICRICC
23. https://doi.org/10.59544/tjer7283/icricc23p4
Dinh, M., Yang, H.-J., Lee, G.-S., Kim, S.-H., & Do, L.-N.
(2016). Recovery of drawing order from multi-stroke
Handwriting Trajectory Recovery of Latin Characters with Deep Learning: A Novel Exploring the Amount of Points per Character and New
Evaluation Method
861

English handwritten images based on graph models and
ambiguous zone analysis. Expert Systems with
Applications, 64, 352–364.
https://doi.org/10.1016/j.eswa.2016.08.004
Elbaati, A., Hamdi, Y., & Alimi, A. M. (2019).
Handwriting recognition based on temporal order
restored by the end-to-end system. In 2019
International Conference on Document Analysis and
Recognition (ICDAR) (pp. 1231–1236). IEEE.
https://doi.org/10.1109/ICDAR.2019.00199
Elbaati, A., Kherallah, M., Ennaji, A., & Alimi, A. M.
(2009). Temporal order recovery of the scanned
handwriting. In 2009 10th International Conference on
Document Analysis and Recognition (pp. 1116–1120).
IEEE. https://doi.org/10.1109/ICDAR.2009.232
Gautam, K., & Singh, S. (2022). Neural Network to
Recognize Handwriting Objects.
Jin, Y., Ran, T., Yuan, L., Lv, K., Wang, G., & Xiao, W.
(2024). Bagging no modelo semi-Markov oculto para
geração de trajetória de robô de escrita manual. J. Intell.
Fuzzy Syst., 46, 6325-6335.
https://doi.org/10.3233/jifs-237275
KumarBhunia, A., Bhowmick, A., Bhunia, A. K., Konwer,
A., Banerjee, P., Roy, P. P., & Pal, U. (2018).
Handwriting trajectory recovery using end-to-end deep
encoder-decoder network. In 2018 24th International
Conference on Pattern Recognition (ICPR) (pp. 3639–
3644). IEEE.
https://doi.org/10.1109/ICPR.2018.8545898
LeCun, Y., Bengio, Y., & Hinton, G. (2015). Deep
learning. Nature, 521(7553), 436–444.
https://doi.org/10.1038/nature14539
Nagoya, T., & Fujioka, H. (2011). A graph theoretic
algorithm for recovering drawing order of multi-stroke
handwritten images. In 2011 Third International
Conference on Intelligent Networking and
Collaborative Systems (pp. 569–574). IEEE.
https://doi.org/10.1109/INCoS.2011.144
Nguyen, V., & Blumenstein, M. (2010). Techniques for
static handwriting trajectory recovery: A survey. In
Proceedings of the 9th IAPR International Workshop
on Document Analysis Systems (pp. 463–470). ACM.
https://doi.org/10.1145/1815330.1815382
Noubigh, Z., & Kherallah, M. (2017). A survey on
handwriting recognition based on the trajectory
recovery technique. In 2017 1st International Workshop
on Arabic Script Analysis and Recognition (ASAR)
(pp. 69–73). IEEE.
https://doi.org/10.1109/ASAR.2017.8067766
Plamondon, R., & Srihari, S. N. (2000). Online and off-
line handwriting recognition: A comprehensive survey.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 22(1), 63–84.
https://doi.org/10.1109/34.824821
Rousseau, L., Anquetil, E., & Camillerapp, J. (2005).
Recovery of a drawing order from off-line isolated
letters dedicated to on-line recognition. In Eighth
International Conference on Document Analysis and
Recognition (ICDAR’05) (pp. 1121–1125). IEEE.
https://doi.org/10.1109/ICDAR.2005.123
Sharma, A. (2013). Recovery of drawing order in
handwritten digit images. In 2013 IEEE Second
International Conference on Image Information
Processing (ICIIP-2013) (pp. 437–441). IEEE.
https://doi.org/10.1109/ICIIP.2013.6707642
Sharma, A. (2015). A combined static and dynamic
feature extraction technique to recognize handwritten
digits. Vietnam Journal of Computer Science, 2(3),
133–142. https://doi.org/10.1007/s40595-015-0041-3
Sharma, N., & Agarwal, P. (2018). Offline handwriting
recognition using neural networks.
Shorten, C., & Khoshgoftaar, T. M. (2019). A survey on
image data augmentation for deep learning. Journal of
Big Data, 6(1), 60. https://doi.org/10.1186/s40537-019-
0197-0
Viard-Gaudin, C., Lallican, P. M., Knerr, S., & Binter, P.
(1999). The ireste on/off (ironoff) dual handwriting
database. In Proceedings of the International
Conference on Document Analysis and Recognition
(pp. 455–458).
https://doi.org/10.1109/ICDAR.1999.791781
Wang, Y., Sonogashira, M., Hashimoto, A., & Iiyama, M.
(2019). Two-stage fully convolutional networks for
stroke recovery of handwritten Chinese character. In
Asian Conference on Pattern Recognition (pp. 321–
334). Springer. https://doi.org/10.1007/978-3-030-
04793-4_26
Xiong, Y., Dai, Y., & Meng, D. (2023). Deep Frame-Point
Sequence Consistent Network for Handwriting
Trajectory Recovery. 2023 IEEE 29th International
Conference on Parallel and Distributed Systems
(ICPADS), 2151-2158.
https://doi.org/10.1109/ICPADS60453.2023.00291
Zhang, X.-Y., Bengio, Y., & Liu, C.-L. (2017). Online and
offline handwritten Chinese character recognition: A
comprehensive study and new benchmark. Pattern
Recognition, 61, 348–360.
https://doi.org/10.1016/j.patcog.2016.07.004
Zhao, B., Yang, M., & Tao, J. (2019). Drawing order
recovery for handwriting Chinese characters. In
ICASSP 2019-2019 IEEE International Conference on
Acoustics, Speech and Signal Processing (ICASSP)
(pp. 3227–3231). IEEE.
https://doi.org/10.1109/ICASSP.2019.8682696
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
862
