
Glass-Box Automated Driving: Insights and Future Trends
Mauro Bellone
1 a
, Raivo Sell
2 b
and Ralf-Martin Soe
1 c
1
FinEst Centre for Smart Cities, Tallinn University of Technology, Estonia
2
Department of Mechanical and Industrial Engineering, Tallinn University of Technology, Estonia
Keywords:
Glass-Box Models, Automated Driving, Performance vs Interpretability Trade-off.
Abstract:
Automated driving has advanced significantly through the use of black-box AI models, particularly in percep-
tion tasks. However, as these models have grown, concerns over the loss of explainability and interpretability
have emerged, prompting a demand for creating ’glass-box’ models. Glass-box models in automated driving
aim to design AI systems that are transparent, interpretable, and explainable. While such models are essential
for understanding how machines operate, achieving perfect transparency in complex systems like autonomous
driving may not be entirely practicable nor feasible. This paper explores arguments on both sides, suggesting
a shift of the focus towards balancing interpretability and performance rather than considering them as con-
flicting concepts.
1 INTRODUCTION
Fully automated driving on roads has been a long-
sought goal, with little significant progress for many
years (Stanton and Young, 1998). The field has only
recently advanced notably, driven by improvements in
hardware computational capabilities and data-driven
models with the promise of end-to-end automated
driving in the near future (Yurtsever et al., 2020).
However, this progress comes at the cost of losing a
clear connection to the fundamentals of process con-
trol (Omeiza et al., 2021). Automated driving on
roads exemplifies the control of a complex system
where data-driven models offer advantages, as creat-
ing detailed analytical models for every component is
nearly infeasible.
Classical optimal control theory aims to design
control processes that achieve optimal tracking of a
desired reference signal, offering elegant analytical
solutions to many problems. The theory begins with
linear, scalar systems and extends to multivariate,
non-linear processes, significantly increasing compu-
tational complexity and the system’s level of abstrac-
tion, particularly due to the challenges of solving
higher-dimensional and non-linear models.
From this perspective, a model that analytically
captures reality at its fundamental level would be
the ideal foundation for building deterministic, error-
a
https://orcid.org/0000-0003-3692-0688
b
https://orcid.org/0000-0003-1409-0206
c
https://orcid.org/0000-0002-6782-1677
proof control systems. By definition, such a system
would qualify as a glass-box model, offering com-
plete interpretability and explainability. On the other
hand, many fundamental physical processes remain
poorly understood, and while the human instinct is to
seek clear explanations, technological advancement
often relies on approximate descriptions to manage
complex control systems in an uncertain real world.
A deeper understanding leads to improved function-
ality, highlighting the importance of interpretabil-
ity. While black-box models may enable control sys-
tems to function effectively, only full analytical inter-
pretability can unlock their true potential.
Following the example of automated driving, a
full analytical and computational description of dy-
namic behavior—such as aerodynamics, tire friction,
and engine response to driver commands—is com-
plex and not entirely practical yet achievable. Steer-
ing robots capable of driving vehicles in structured
environments, such as test tracks, have existed since
the 1980s (Weisser et al., 1999). The real challenge,
however, lies in real-world interactions, where model-
ing the unpredictable behavior of other road users be-
comes increasingly difficult. In such scenarios, users
expect a robotic driver to act deterministically and
make safety-critical decisions within fractions of a
second.
Following this line of research, this work dis-
cusses the following research questions while focus-
ing on the problem of automated driving:
RQ1. What are the practical motivations for build-
ing glass-box analytical models?
880
Bellone, M., Sell, R. and Soe, R.-M.
Glass-box Automated Driving: Insights and Future Trends.
DOI: 10.5220/0013384300003890
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 880-885
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
RQ2. What are the challenges in achieving full ex-
plainability and interpretability in the field of
automated driving?
RQ3. What viable strategies exist for achieving
transparency in automated driving systems?
This paper is structured as follows: Section 2 pro-
vides the motivation for applying glass-box models
and presents our perspective on RQ1. Section 3 ex-
plores the challenges of developing such models in
the field of automated driving, addressing RQ2. Fi-
nally, our proposed strategy for RQ3, which focuses
on modularizing models and balancing interpretabil-
ity with performance, is discussed in Section 4.
2 MOTIVATION
Let’s assume we want to design a system capable of
taking the best action in every situation, following a
data-driven approach. For simplicity, we can envi-
sion it as a perfect driver: one that always selects the
optimal route from A to B while ensuring energy ef-
ficiency, minimal travel time, safety, and passenger
comfort.
The process of building such a system would in-
volve recording pairs of information points and opti-
mal actions. Each information point can be consid-
ered as an abstract representation of everything the
robotic driver perceives, including the internal vehi-
cle status and any external sources of information
(e.g., driving scenario, traffic conditions, other road
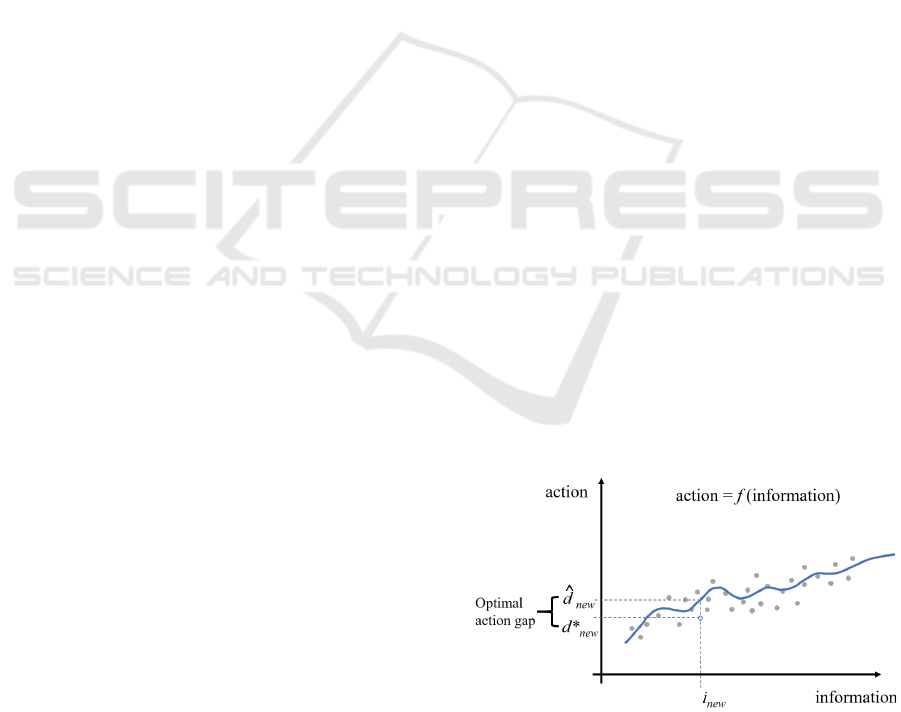
users, etc.). For simplicity Fig. 1 provides an ab-
stract representation of these information points on an
action-information Cartesian map, where i represents
our information content and d represents our best
recorded decision in such a scenario. By consider-
ing all recorded information, represented as gray dots,
one can construct a function—using any analytical
fitting method—thus obtaining an action-information
mapping function.
The goal of building such a function is to use the
action-information model as a decision-making tool
to estimate the best action as new information be-
comes available. If we assume that the blue line in
Fig. 1 represents our best model, when new informa-
tion i
new
arrives, the model’s guess should be no other
than
ˆ
d
new
as the intersection point between the infor-
mation and the model. However, the optimal decision
in that situation may be something slightly different,
such as d
∗
new
, resulting in a gap between the model’s
guess and the true optimal decision.
Such an gap in the optimality might result from:
1. Measurement errors in both the information used
to build the model and the new data point.
2. Approximation errors due to complex interactions
between variables not fully captured by the model.
3. Truly unknown circumstances, highlighting a dif-
ference between the current information point and
previous knowledge of the system.
4. A change in the operational domain, where the
model was not trained or calibrated for new con-
ditions, leading to discrepancies in the decision-
making process.
Sticking to the example of automated driving, the
gap in the optimal decision can lead to a wide range
of consequences, from minor delays in travel time or
passenger discomfort to more severe outcomes like
crashes. How can one identify the cause of a miscal-
culation in the decision-making process if the system
is a fully enclosed black box?
From this perspective, all points mentioned ear-
lier—measurement errors, approximation errors, truly
unknown circumstances, and changes in the opera-
tional domain—are equally valid sources of error with
very little possible action to address and correct such
errors to ensure the system functions properly across
different scenarios. The current black-box approach
to solving this problem tends to add information to the
system indefinitely, leading to memorization rather
than meaningful knowledge abstraction with minimal
validation and verification possibilities (Pikner et al.,
2024).
Assuming that our action-information model is an
analytical multivariate function underpinning our pro-
cess, a gap in decision-making can be investigated,
studied, and potentially debugged if, and only if, the
system can be fully explained and interpreted.
Often, interpretability and explainability are seen
as a written form of text providing an explanatory
Figure 1: Action - information model depiction. Gray dots
constitute information points used to generate the fitting
function in blue. The optimality gap arise from the dif-
ference between the optimal decision d
∗
new
and the model
guess
ˆ
d
new
.
Glass-box Automated Driving: Insights and Future Trends
881

statement about driving decisions and specific actions
(Omeiza et al., 2022). However, this approach should
not be conflated with true interpretability or account-
ability. The generated text, often produced by black-
box LLMs (large language models), merely describes
the situation without offering useful debugging infor-
mation. As LLMs have shown, it is always possible
to generate ‘human-understandable’ explanations that
can be terribly misleading and fail to reflect the sys-
tem’s actual behavior at its fundamental level. Thus,
this type of verbal explanation often falls more into
the realm of psychological perspective rather than a
genuine interpretation of system behavior.
3 CHALLENGES
Without any doubt, full black-box models have
demonstrated compelling capabilities in controlling
complex systems such as autonomous vehicles (Chen
et al., 2024). This achievement cannot be neglected,
as it represents a significant opportunity to address
long-term practical problems. However, glass-box
models offer the opportunity to debug and refine these
systems by providing full control and transparency.
This allows for a deeper understanding and improve-
ment of each system’s behavior (Kuznietsov et al.,
2024).
The first significant challenge in building a glass-
box control system for autonomous driving lies in
managing the complexity of the environment. As pre-
viously mentioned, the challenge does not stem from
driving along a predefined path at a precise velocity
but rather from interacting effectively with the sur-
rounding environment. Autonomous driving requires
processing vast amounts of real-time data from sen-
sors such as cameras, LiDAR, radar, and GPS. The
decision-making process entails intricate interactions
between perception, prediction, and control systems,
which are often modeled using complex deep learning
or neural networks—methods that are inherently dif-
ficult to interpret. Figure 2 illustrates the control flow
from low-level to high-level driving models. The con-
cept is that any state-of-the-art controller, from PID
(Emirler et al., 2014) to Lyapunov-based controllers
(Alcala et al., 2018) (Karafyllis et al., 2022), can
effectively and precisely manage vehicle speed and
steering angle, provided a simplified physical model
of the vehicle is known. The assumptions required
for these controllers to function are often unrealis-
tic and ineffective at predicting dynamic environmen-
tal changes. The higher the complexity of the ve-
hicle model, the better and more effective the con-
troller. This capability is sufficient for driving in
structured environments. The system’s internal com-
ponents, highlighted with a dashed line in Fig. 2, can
be fully explainable and interpretable PIDs. Litera-
ture offers a robust foundation of analytical analyses
and formal solutions for the problem of following ref-
erence signals, enabling deterministic control in these
scenarios (Fleming and Rishel, 2012).
As the research community approached this prob-
lem, it quickly became evident that addressing it re-
quired multiple levels of abstraction. At the very low
level, classical automatic controllers, such as PID or
model predictive controllers, perform their tasks ef-
fectively. However, tackling vehicle perception and
routing with the same level of detail as low-level con-
trol, represented in the outer cycle of Fig. 2, is com-
putationally and practically infeasible.
The routing problem itself can be subdivided into
two distinct components: the generation of kinemat-
ically or dynamically feasible trajectories for short-
range vehicle control, and waypoint generation for
high-level vehicle routing. The former requires solv-
ing differential equations, which are computationally
demanding and often limited to localized regions.
The latter typically employs simpler, non-physically
compliant algorithms, such as Dijkstra’s algorithm
or rapidly-exploring random trees (RRT) (LaValle,
2006). Attempting to solve differential equations for
every point along a long path is not only computa-
tionally prohibitive but also ineffective, as it assumes
a static environment, thereby reducing the system’s
ability to adapt to dynamic changes. Conversely, ig-
noring differential equations altogether can result in
unfeasible paths that violate the vehicle’s physical
constraints.
The routing problem exemplifies the necessity
for different levels of abstraction to address com-
plex challenges in autonomous driving. Each level
retains its own interpretability: long-range planning
may sacrifice physical precision but provides compu-
tational efficiency, while short-range trajectory gen-
eration maintains a detailed physical interpretation.
This balance allows the system to adapt to a dynamic
environment while ensuring feasibility at a local level.
On a different level, the perception problem,
which includes tasks such as object detection and seg-
mentation, is predominantly addressed using black-
box models (Huang et al., 2022). On one hand, these
models excel in providing detection capabilities that
can even surpass human performance in certain sce-
narios, such as low-light conditions or when integrat-
ing data from multiple sensor sources. An illustrative
example is shown in the two images in Fig. 2 which
are extracted from the IseAuto dataset (Gu et al.,
2023) and include the addition of a black-box seg-
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
882

Figure 2: Levels of control abstractions featuring low-level
process control and high-level intelligent functions. Visual
images from IseAuto dataset (Gu et al., 2023).
mentation result (Gu et al., 2024).
On the other hand, they lack an understanding of
the semantic meaning of objects within a scene, treat-
ing a tree and a person merely as objects without rec-
ognizing their distinct roles or contextual importance.
Contextual importance is inherently challenging to
capture, as even human observers may assign vary-
ing interpretations and significance to similar objects
in a scene. An interpretable and explainable model
should not aim to produce verbose descriptions of a
scene but rather to classify objects accurately while
accounting for their high-level roles and importance.
For instance, in such a framework, errors or flaws in
detecting vehicles or pedestrians, compared to non-
critical objects like rocks or foliage, could be identi-
fied, debugged, and addressed in a targeted manner.
3.1 Safety-Critical Nature
While it may seem that autonomous vehicles must pri-
oritize split-second decision-making over immediate
explanations, it is precisely in these high-stakes sce-
narios that the effort to build simple, classical control,
and rule-based systems becomes essential. Trans-
parency is critical for diagnostics and regulatory com-
pliance, and it is often mischaracterized as compro-
mising the vehicle’s ability to respond effectively in
emergencies. On the contrary, such transparency en-
sures that misunderstandings or misinterpretations are
minimized, particularly in situations where they can-
not be tolerated. In (Abrecht et al., 2024), the au-
thors clearly emphasize the safety concerns that deep
learning poses to automated driving, covering aspects
such as operational domain definition and limitations,
as well as the methods used for data preparation and
algorithm development. Moreover, regulations are
placing increasing emphasis on the importance of AI
explainability in safety-critical industries like trans-
portation. Glass-box models are required to comply
with stringent industry standards, such as ISO 26262
(ISO, 2011) (functional safety) and ISO/PAS 21448
(Safety of the Intended Functionality - SOTIF), to en-
sure reliability, accountability, and safety (Kirovskii
and Gorelov, 2019). Additionally, frameworks such
as the European Union’s Ethics Guidelines for Trust-
worthy AI and the U.S. NIST’s initiatives on AI ex-
plainability advocate for more transparent and ac-
countable AI systems. The recently adopted AI Act
(Regulation (EU) 2024/1689 laying down harmonized
rules on artificial intelligence) sets clear requirements
and obligations for AI developers, emphasizing ex-
plainability and accountability in AI-based systems,
including automated driving functionalities.
4 STRATEGIES AND FUTURE
TREND
Several strategies exist to achieve transparency, ac-
countability, and explainability in automated driving,
many of which can be applied to other complex sys-
tems that benefit from black-box models. While a
fully glass-box model for automated driving may be
impractical in its purest form—particularly in com-
plex real-world scenarios—it remains an ambitious
long-term goal. In the interim, hybrid models rep-
resent a practical solution, leveraging the strengths
of both interpretable and black-box approaches. A
promising strategy is to combine interpretable models
for high-level decision-making with black-box mod-
els for perception tasks, striking a balance between
interpretability and efficacy with the goal of reducing
black-box models to the miminum level. For exam-
ple, rule-based logic can be applied to lane-change
policies (Malayjerdi et al., 2022), providing clear
and explainable decision-making, while deep learn-
ing models handle object detection, which often bene-
fits from the data-driven adaptability of black-box ap-
proaches
The application of simpler, domain-specific mod-
els also offers notable strengths in achieving trans-
parency and reliability. In constrained environments,
such as autonomous shuttles or last-mile delivery ve-
hicles, rule-based systems or simpler machine learn-
ing models can effectively balance explainability with
functionality. This approach aligns with the concept
of maintaining a human-in-the-loop framework, al-
lowing human operators to oversee decisions and in-
tervene when necessary. This ensures that actions
taken by the system adhere to ethical and safety con-
siderations. Moreover, adopting a modular system
design—breaking the driving stack into smaller, in-
terpretable modules—further aids in achieving trans-
parency. For example:
Glass-box Automated Driving: Insights and Future Trends
883
• Perception: Explains how objects are detected and
classified.
• Planning: Provides insights into why a particular
trajectory or decision was selected.
• Control: Demonstrates how the vehicle executes
the planned commands.
These modular explanations help ensure that the
system remains interpretable and debuggable, while
still benefiting from advancements in AI and automa-
tion. Even in such scenarios, designers must rely on
extensive simulation environments and formal verifi-
cation methods to understand and validate system be-
haviors under diverse conditions.
Autonomous systems operate in the physical
world, a domain governed by the principles of physics
(e.g., Maxwell’s equations, Newton’s laws). These
principles provide a robust foundation for defining
a governing framework that can enhance both ex-
plainability and interpretability. A critical question
emerges:
How might one leverage the fundamental prop-
erties of physics to build a validation governor
around AI-based autonomy systems?
This question remains an open avenue for re-
search, challenging the community to explore inno-
vative ways to integrate physical laws into the vali-
dation and explainability frameworks of autonomous
systems (Pikner et al., 2024).
The application of Post-Hoc Explainability such
as saliency maps, SHAP (Shapley Additive Explana-
tions) (Lundberg and Lee, 2017), (Lundberg et al.,
2020), or LIME (Local Interpretable Model-Agnostic
Explanations) (Ribeiro et al., 2016) to analyze and ex-
plain decisions made by black-box models constitute
also emergent solutions. One might note that Post-
hoc methods do not require the model to be inher-
ently interpretable but rather attempt to interpret and
explain the outputs of a AI model after it has been
trained, which makes them practical for use with com-
plex models that prioritize performance but sacrifice
interpretability.
5 CONCLUSION
A fully glass-box model for automated driving is
likely impractical in its purest form, particularly in
complex real-world scenarios as highly interpretable
models (e.g., decision trees or rule-based systems)
may struggle to capture the nuanced decision-making
required in dynamic driving environments. How-
ever, hybrid approaches that blend interpretability
with black-box models offer a practical way forward
while keeping the aspiration for full glass-box designs
alive. As is often the case in engineering, the optimal
solution lies in the middle ground—making the crit-
ical components of the system transparent enough to
ensure safety, reliability, and accountability, without
compromising performance.
The drive to pursue glass-box models is deeply
rooted in the fundamental curiosity of engineers. The
question, ’Why does a system work the way it does?’
forms the very basis of scientific exploration. With-
out such curiosity, humanity might still accept a flat
Earth as truth, never challenging experiences that
seem counterintuitive or seeking alternative perspec-
tives. The essence of progress lies in questioning and
reframing our understanding of the world and its com-
plexities.
ACKNOWLEDGMENT
Part of this research has received funding from the Eu-
ropean Union’s Horizon 2020 Research and Innova-
tion Programme under grant agreement No. 856602
(Finest Twins) and from the European Union’s Hori-
zon Europe Research and Innovation Programme un-
der grant agreement No. 101135988 (PLIADES:
AI-Enabled Data Lifecycles Optimization and Data
Spaces Integration for Increased Efficiency and Inter-
operability)
REFERENCES
Abrecht, S., Hirsch, A., Raafatnia, S., and Woehrle, M.
(2024). Deep learning safety concerns in automated
driving perception. IEEE Transactions on Intelligent
Vehicles, pages 1–12.
Alcala, E., Puig, V., Quevedo, J., Escobet, T., and Comaso-
livas, R. (2018). Autonomous vehicle control using a
kinematic lyapunov-based technique with lqr-lmi tun-
ing. Control engineering practice, 73:1–12.
Chen, L., Wu, P., Chitta, K., Jaeger, B., Geiger, A., and
Li, H. (2024). End-to-end autonomous driving: Chal-
lenges and frontiers. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 46(12):10164–
10183.
Emirler, M. T., Uygan,
˙
I. M. C., Aksun G
¨
uvenc¸, B.,
and G
¨
uvenc¸, L. (2014). Robust pid steering con-
trol in parameter space for highly automated driv-
ing. International Journal of Vehicular Technology,
2014(1):259465.
Fleming, W. H. and Rishel, R. W. (2012). Deterministic
IAI 2025 - Special Session on Interpretable Artificial Intelligence Through Glass-Box Models
884

and stochastic optimal control, volume 1. Springer
Science & Business Media.
Gu, J., Bellone, M., Pivo
ˇ
nka, T., and Sell, R. (2024).
Clft: Camera-lidar fusion transformer for semantic
segmentation in autonomous driving. arXiv preprint
arXiv:2404.17793.
Gu, J., Lind, A., Chhetri, T. R., Bellone, M., and Sell, R.
(2023). End-to-end multimodal sensor dataset col-
lection framework for autonomous vehicles. Sensors,
23(15):6783.
Huang, K., Shi, B., Li, X., Li, X., Huang, S., and
Li, Y. (2022). Multi-modal sensor fusion for
auto driving perception: A survey. arXiv preprint
arXiv:2202.02703.
ISO (2011). Iso 26262 road vehicles– functional safety. ISO
Standard (2011).
Karafyllis, I., Theodosis, D., and Papageorgiou, M. (2022).
Lyapunov-based two-dimensional cruise control of
autonomous vehicles on lane-free roads. Automatica,
145:110517.
Kirovskii, O. and Gorelov, V. (2019). Driver assistance sys-
tems: analysis, tests and the safety case. iso 26262 and
iso pas 21448. In IOP Conference Series: Materials
Science and Engineering, volume 534, page 012019.
IOP Publishing.
Kuznietsov, A., Gyevnar, B., Wang, C., Peters, S., and
Albrecht, S. V. (2024). Explainable ai for safe and
trustworthy autonomous driving: A systematic review.
arXiv preprint arXiv:2402.10086.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
Lundberg, S. M., Erion, G., Chen, H., DeGrave, A., Prutkin,
J. M., Nair, B., Katz, R., Himmelfarb, J., Bansal, N.,
and Lee, S.-I. (2020). From local explanations to
global understanding with explainable ai for trees. Na-
ture machine intelligence, 2(1):56–67.
Lundberg, S. M. and Lee, S.-I. (2017). A unified ap-
proach to interpreting model predictions. In Guyon, I.,
Luxburg, U. V., Bengio, S., Wallach, H., Fergus, R.,
Vishwanathan, S., and Garnett, R., editors, Advances
in Neural Information Processing Systems 30, pages
4765–4774. Curran Associates, Inc.
Malayjerdi, E., Sell, R., Malayjerdi, M., Udal, A., and Bel-
lone, M. (2022). Practical path planning techniques in
overtaking for autonomous shuttles. Journal of Field
Robotics, 39(4):410–425.
Omeiza, D., Web, H., Jirotka, M., and Kunze, L. (2021).
Towards accountability: Providing intelligible expla-
nations in autonomous driving. In 2021 IEEE Intelli-
gent Vehicles Symposium (IV), pages 231–237. IEEE.
Omeiza, D., Webb, H., Jirotka, M., and Kunze, L. (2022).
Explanations in autonomous driving: A survey. IEEE
Transactions on Intelligent Transportation Systems,
23(8):10142–10162.
Pikner, H., Malayjerdi, M., Bellone, M., Baykara, B. C.,
and Sell, R. (2024). Autonomous driving validation
and verification using digital twins. VEHITS, pages
204–211.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ”why
should I trust you?”: Explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
International Conference on Knowledge Discovery
and Data Mining, San Francisco, CA, USA, August
13-17, 2016, pages 1135–1144.
Stanton, N. A. and Young, M. S. (1998). Vehicle automation
and driving performance. Ergonomics, 41(7):1014–
1028.
Weisser, H., Schulenberg, P., Gollinger, H., and Michler, T.
(1999). Autonomous driving on vehicle test tracks:
overview, implementation and vehicle diagnosis. In
Proceedings 199 IEEE/IEEJ/JSAI International Con-
ference on Intelligent Transportation Systems (Cat.
No. 99TH8383), pages 62–67. IEEE.
Yurtsever, E., Lambert, J., Carballo, A., and Takeda, K.
(2020). A survey of autonomous driving: Common
practices and emerging technologies. IEEE access,
8:58443–58469.
Glass-box Automated Driving: Insights and Future Trends
885
