
Formal Analysis of Deontic Logic Model for Ethical Decisions
Krishnendu Ghosh
a
and Channing Smith
b
Department of Computer Science, College of Charleston, SC, U.S.A.
Keywords:
Model Checking, Deontic Logic, Ethics, Computation Tree Logic.
Abstract:
Ethical decision making is key in the certification of autonomous system. Modeling and verification of the
actions of an autonomous system becomes imperative. An automated model abstraction for an autonomous
system is constructed based on components of deontic logic such as obligation, permissible, and forbidden
actions. Temporal logic queries have been formulated and posed as queries to evaluate for ethical decision
making. A prototype of the formalism is constructed and model checking is performed. Experiments were
conducted to evaluate the computational feasibility of the formalism. The experimental results are presented.
1 INTRODUCTION
Artificial intelligence (AI) based autonomous sys-
tems (AS) are becoming ubiquitous. Construction
of ethical autonomous systems requires ethical deci-
sion making, and the roles of human-system interac-
tion require fulfillment of the ethical guidelines. The
decision-making processes under certain complex sit-
uations, namely arising due to dilemmas, are very
complex because the definitions are not clear regards
to the preferences of selecting an action from a set
of actions. Ethical dilemmas occur during situations
where the correct action are dependent on the con-
text. Formally, an ethical dilemma is a situation in
which two moral principles conflict with each other.
For example, it is immoral to write malicious soft-
ware. However, if writing malicious software is the
only means to provide for his family, then there is a
moral conflict with writing the software. The preci-
sion in incorporating the moral actions that are depen-
dent on the context during the ethical decision making
process is challenging. Hence, the execution of deci-
sions by the autonomous systems are often found to
be inexact in ethical decision-making.
Formal approaches are useful in understanding the
decisions of autonomous systems and form the foun-
dations of correct implementation of ethical proper-
ties (Bonnemains et al., 2018). However, there are
challenges in formal verification in autonomous sys-
tem to fulfill ethical behavior (Fisher et al., 2021).
The outcome of the formal models is expected to
a
https://orcid.org/0000-0002-8471-6537
b
https://orcid.org/0009-0001-4037-5187
describe a series of actions adhering to the ethical
rules and are designed to automatically make deci-
sions in the given situation and explain why the de-
cision is ethically acceptable. Formal verification
techniques such as model checking (Clarke, 1997)
have been used in the software verification of avion-
ics and chip design system. The outcome of model
checking on verification of ethical autonomous sys-
tems is expected to provide a reasoning mechanism
to the developer of autonomous systems to determine
whether an action is ethical or unethical. In the eval-
uation of the decision-making process for an ethical
AS, model checking can identify the actions that are
ethically permissible or non-permissible. Therefore,
a sequence of actions that conform to ethical rules
are constructed. Formal verification of ethical au-
tonomous system is illustrated in Figure 1. A model
abstraction, M representing the motion of an au-
tonomous system is constructed. An action, whether
it is ethical or unethical is evaluated in the model,
M and is represented in the form of temporal logic
formula, φ. The temporal logic formula, φ is con-
structed by the developer and then, posed as a query
to the model, M for verification. If φ is true in M then
the model satisfies the specification. Feedback from
model checking is useful for the developer to make
changes in the construction of the autonomous system
to fulfill the ethical properties. In this work, a for-
malism is constructed, where the actions are labeled
based on deontic logic rules with the goal of iden-
tification and execution a set of ethical actions per-
formed by an autonomous system. The formalization
uses an automated model abstraction by applying the
218
Ghosh, K. and Smith, C.
Formal Analysis of Deontic Logic Model for Ethical Decisions.
DOI: 10.5220/0013385200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 218-223
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
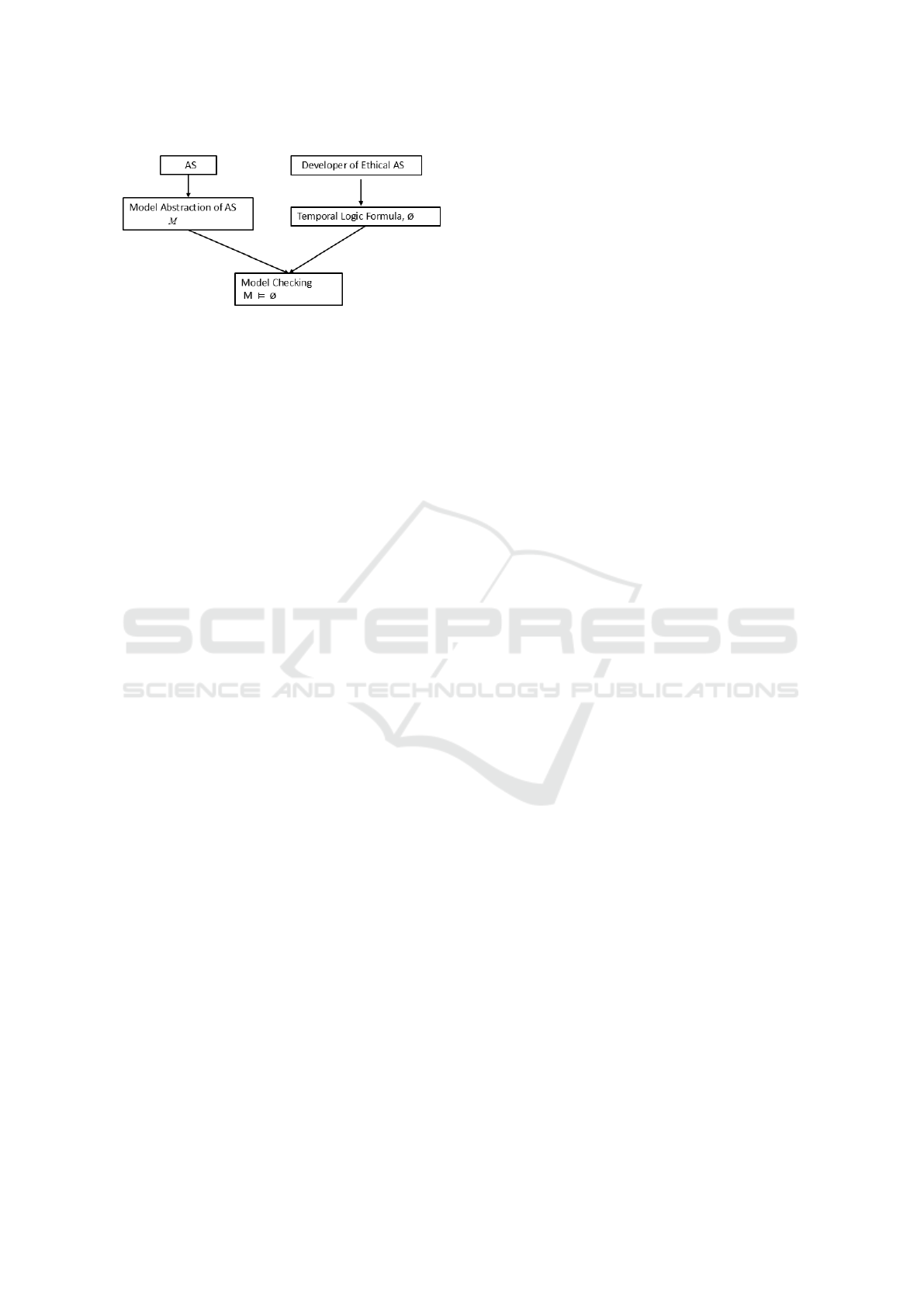
Figure 1: Model Checking of Ethical Autonomous Systems
(AS).
deontic logic rules that allow only ethical actions in
the model. Reasoning by temporal logic such as com-
putation tree logic (CTL) constructs an ethical plan
comprising of ethical actions. The following is the
contribution of this work.
1. Automated model abstraction using deontic-logic
based rules for extraction of ethical sequence of
actions.
2. Evaluation of computational feasibility for model
checking for the abstraction representing the mo-
tion of an autonomous system.
The model abstraction constructed in this work re-
quires minimal assumptions and considers all possi-
ble actions that an AS can undertake. The formalism
is applied to investigate the identification of sets of
ethical actions for an aircraft in an airport.
2 BACKGROUND
The use of AI systems raises ethical questions and
the need for organizations to adhere to ethical guide-
lines (Balasubramaniam et al., 2020). Specifically, for
the construction of an ethical AI system, the decision
making process of AI systems should be responsive
(Dignum et al., 2018) to the features of AI systems
that are safe, trustworthy, and ethical. Signal temporal
logic has been used as a specification language for an
abstraction of autonomous vehicles (Arechiga, 2019).
The features that were considered, such as reachabil-
ity and safety, were included in the specifications.
The connection between ethics and automated rea-
soning is complex, as an action could be ethical in a
particular context, however the same action is deemed
unethical in some other context. The integration of
ethics in reasoning form the framework for the de-
cisions taken by an AI system for a human observer
(Bonnemains et al., 2018). There are challenges for
formal verification in the evaluatiion ethical proper-
ties (Fisher et al., 2021). Formal verification of eth-
ical properties for multiagent systems have been re-
ported by addressing conflicting moral rules (Mermet
and Simon, 2016). A detailed literature is described
in the survey on formal models and verification of au-
tonomous robotic systems (Luckcuck et al., 2019).
Model checking of human-agent behavior was
evaluated for decisions that were considered safe,
controllable and ethical (Abeywickrama et al., 2019)
on a prototype of unmanned aerial vehicle-human in
dynamic and uncertain environment. A case study
on responsible and responsive approaches for deploy-
ment of autonomous system in defense has been pub-
lished (Roberson et al., 2022). Formal modeling for
ethical choices for autonomous systems using a ratio-
nal agent was reported (Dennis et al., 2016). Formal
analysis on a model of Dominance Act Utilitarian-
ism have been described (Shea-Blymyer and Abbas,
2022).
The study for transformation of deontic logic rules
in description logic and then, theorem provers were
applied (Furbach et al., 2014). Deontic logic has
been applied as a tool in reasoning normative state-
ments(Gabbay et al., 2021). Our work is based on
reasoning on a model that leverages on categorization
of actions based on the deontic logic rules. The model
abstraction represents the motion conforming the eth-
ical rules
3 PRELIMINARIES
In this section, the mathematical and logical con-
structs that form the foundations of this work is de-
scribed.
3.1 Model for Actions Using Deontic
Logic
Deontic logic has components- obligations, permis-
sible and forbidden actions. For a set of actions, A,
each action a ∈ A can be labeled as obligation, per-
missible or forbidden action. Given a set of actions,
A the following sets are constructed:
1. Set of obligations, O
2. Set of permissible actions, P
3. Set of forbidden actions, F
Notation: O
a
∈ O,P
a
∈ P and F
a
∈ F denote an
action,a as obligation, permissible and forbidden. Ad-
ditionally, a forbidden action, F
/
0
represents an action
succeeding a forbidden action and is a way to main-
tain the totality property of finite state machine for
model checking. For clarity, F will denote any for-
bidden action, including F
/
0
.
A triple of actions (t-action), ⟨O
a
,P
a
,F
a
⟩ repre-
sents any combination of obligation, permissible and
Formal Analysis of Deontic Logic Model for Ethical Decisions
219

forbidden actions. An outcome is denoted by, s → s
′
where s,s
′
are t-actions. Notation: s = ⟨O
a
,P
a
,F
a
⟩
and s
′
= ⟨O
a
′
,P
a
′
,F
a
′
⟩ and at least one of the follow-
ing actions is true O
a
̸= O
a
′
or P
a
̸= P
a
′
or F
a
̸= F
a
′
.
The reading of an outcome, s → s
′
is after an comple-
tion of one of the actions in s leads to the execution of
actions in s
′
. We define types of outcome with specific
properties:
1. Admissible Outcome (a-outcome): An
outcome,s → s
′
is admissible if for any t-
action, s = ⟨O
a
,P
a
,F
a
⟩ and s
′
= ⟨O
a
′
,P
a
′
,F
a
′
⟩,
there is at least one of the following is true
O
a
̸= O
a
′
or P
a
̸= P
a
′
or F
a
̸= F
a
′
.
2. Inadmissible Outcome(i-outcome): An outcome
where the t-action is s = ⟨O
a
,P
a
,F
a
⟩ and F
a
̸= F
/
0
.
3. Total outcome (t-outcome): A outcome, s → s
′
where s
′
= s.
The i-outcome requires the t-actions to have a forbid-
den action while it is not necessary for t-outcome to
have a forbidden action. A trace of t-actions ,π is a
sequence of given by π = s
1
,s
2
,. ..,s
k
where k ∈ N.
3.2 Model Checking
Model checking is a formal verification method where
the specifications are represented by a logic formula
and posed as a query to a model, represented by a
finite state machine.
Definition 1. (Model checking (Clarke, 1997) Given
a model, M and formula, φ , model checking is the
process of deciding whether a formula φ is true in the
model, written M |= φ.
Model checking (Clarke et al., 1986) is performed by
posing queries in temporal logic on finite state ma-
chines. The finite state machine representation for
reasoning is, Kripke structure. Formally,
Definition 2. A Kripke structure M over a set AP of
proposition letters is a tuple, M = ⟨S
0
,S, R,L⟩ where,
1. S is a finite and nonempty set of states.
2. S
0
⊆ S is a set of states called the initial states.
3. R is a transition relation, R ⊆ S × S.
4. L : S → 2
AP
is the labeling function that labels s ∈
S with the atomic propositions that are true in s.
In order to maintain totality of the model, a transition
system is a Kripke structure, M where, for each state
s ∈ S, there is at least s
′
∈ S where (s, s
′
) ∈ R.
Definition 3. An edge-labeled (E) Kripke transition
system M
e
over a set of AP of proposition letters and
a set E of labels is a tuple, M
e
⟨S
o
,S, R,L,L
e
⟩ where,
1. ⟨S
o
,S, R,L⟩ is a Kripke transition system.
2. L
e
: R → E
In this work, we evaluate ethical action in a system,
representing all possible actions, by posing specifica-
tion in computation tree logic (CTL) (Clarke et al.,
1986) formula on a model, M . M is the Kripke tran-
sition system that represents the all possible actions
to evaluate the possible set of ethical actions.
Syntax of CTL:
φ ::= ⊤ | p | (¬φ) | (φ ∧ φ) | (φ → φ) | Aψ | Eψ
ψ ::= φ | Xφ | φUφ | Fφ | Gφ
The temporal logic operators, A,E,F and G mean for
all , there exists, in some future, always in future, re-
spectively. The meaning of the operators, X is next
state and U is Until ; are state and path formulas, re-
spectively. p is an atomic proposition.
Semantics of CTL:
The interpretation of the CTL formula are based
on the Kripke transition system, M . Given a
model,M ; s ∈ S and φ , a CTL formula - the seman-
tics of a CTL formula are defined recursively (Huth
and Ryan, 2004): M , s |= ⊤ and M ,s ̸|=⊥, ∀s ∈ S .
M ,s |= p if p ∈ L(s).
M ,s |= ¬φ iff M ,s ̸|= φ .
M ,s |= φ
1
∧ φ
2
iff M ,s |= φ
1
and M ,s |= φ
2
M ,s |= φ
1
∨ φ
2
iff M ,s |= φ
1
or M
n
,s |= φ
2
M ,s |= φ
1
→ φ
2
iff M ,s ̸|= φ
1
or M ,s |= φ
2
M ,s |= AXφ iff ∀s
1
s → s
1
, M ,s
1
|= φ.
M ,s |= EXφ iff ∃s
1
s → s
1
M ,s
1
|= φ.
M ,s |= AGφ iff for all paths s
1
→ s
2
→ s
3
→ . ..
,where s
1
= s and for all s
i
along the path, M ,s
i
|= φ .
M ,s |= EGφ iff there is a path s
1
→ s
2
→ s
3
→ . ..
,where s
1
= s and for all s
i
along the path, implies
M ,s
i
|= φ.
M ,s |= AFφ iff for all paths s
1
→ s
2
→ s
3
→ . ..
,where s
1
= s and there is some s
i
along the path, im-
plies M ,s
i
|= φ.
M ,s |= EFφ iff there is a path s
1
→ s
2
→ s
3
→ ...
,where s
1
= s and there is some s
i
along the path, im-
plies M ,s
i
|= φ.
M ,s |= A[φ
1
Uφ
2
] holds iff for all paths s
1
→ s
2
→
s
3
→ . .. where s
1
= s. that path satisfies φ
1
Uφ
2
such
that M ,s
i
|= φ
2
and for each j < i ,M ,s
j
|= φ
1
.
M ,s |= E[φ
1
Uφ
2
] holds iff there is a path s
1
→ s
2
→
s
3
→ where s
1
equals s and that path satisfies φ
1
Uφ
2
.
4 MODEL ABSTRACTION
The model abstraction of deontic logics for ethics is
described. The first step is the construction of the E-
Kripke transition system for the set of ethical rules.
An algorithm is constructed to create a Kripke transi-
tion system for model checking. We are given (1) a set
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
220

of actions, A, (2) for each action, a ∈ A is labeled as
obligations (O), permission(P) and forbidden(F) ac-
tions, (3) a set of t-actions, T
a
and (4) a set of out-
comes, Out The E-Kripke transition system M
e
=
⟨S
0
,S, R,L,L
e
⟩ is described as follows:
1. AP is the set of all atomic formulas of the form,s =
⟨O
a
,P
a
,F
a
⟩ where ⟨O
a
,P
a
,F
a
⟩ ∈ T
a
.
2. S is the set of all subsets s of AP where exactly
one of the formula, ⟨O
a
,P
a
,F
a
⟩ is in s.
3. S
0
is the set of initial states of the E-Kripke transi-
tion system. An initial state contains the t-actions
where the permissible action is to be the initial ac-
tion. Therefore,
4. The label(edge label) on a transition is the out-
come, out ∈ Out. The labeled transition is rep-
resented by a triple,⟨s,e,s
′
⟩ where e = out and
out ∈ {a − outcome,i − outcome,t − outcome}
The construction of the Kripke structure for model
checking is performed. Initially, the E-Kripke transi-
tion system representing the t-actions to be performed
by an autonomous system begins where each transi-
tion is labeled with an outcome. There is a transition
for each state to every other state. The edge labels
with a − outcome will remain in the structure. The
transition with edge label,i − outcome will be pruned.
The transitions with edge label, t − outcome will be
pruned and a self-loop will be constructed on the out-
going state of the outcome. After pruning and adding
transitions to the E-Kripke transition system, the tran-
sition system without edge labels is denoted by M .
Formally, Algorithm 1 demonstrates the process of
model abstraction of actions of an autonomous sys-
tem that will be evaluated for ethical properties.
Algorithm 1: Model Abstraction.
Input: Set of states, S where each state is labeled
with t −actions, Set of outcomes, Out.
Output: Kripke transition system ,M = ⟨S
0
,S, R,L⟩
1: for each state, s ∈ S do
2: Construct s
e
→ s
′
where e ∈ Out and s, s
′
∈ S
//E-Kripke transition system is constructed.
3: end for
4: for each s
e
→ s
′
do
5: if ( e = ’i-outcome’ ) then
6: s ̸→ s
′
. // The transition is pruned.
7: s → s // Self loop is added and t-
outcome is created.
8: end if
9: end for
10: M = ⟨S
0
,S, R,L⟩
Algorithm 1 constructs the Kripke transition system
from the set of labeled states with t − actions and set
of outcomes, Out. The correctness of the algorithm
is sketched. Algorithm Model Abstraction terminates
after finite number of steps. The input is finite be-
cause the number of labeled states, S and the set of
outcomes, Out are finite. The for-loop in line(1)-(3)
and in line(4)-(8) execute finite number of times as
the number of states is finite.
5 APPLICATION OF DEONTIC
LOGIC FORMALISM
The model abstraction using deontic logic constructs
is applied on movement of unmanned aerial vehicle
during take off in an airport. The goal is to evalu-
ate ethical decision making such that the aircraft nav-
igates the obstacles and taxi on the runway and then,
successfully takeoff from the ground. The application
of aircraft was selected and adapted from a set of pub-
lished examples (Dennis et al., 2016). The published
case study modeled erratic intruder aircraft with other
aircraft complying with the rules of the air (ROA).
The movements of the unmanned aircraft are similar
to the case study in this work.
The obstacles in the scenario represent things such
as airport support vehicles and buildings that may be
in the way of take off. The aircraft has the ability
to move in different directions: right, forward, left,
and stop. Furthermore, an additional component of
this scenario is monitoring the distance that the air-
craft moves. The aircraft can move distances of 0, 50,
100, 150, 200, and 250 meters. Figure 2 shows only
two obstacles. However, for our experiments, we have
constructed 3 obstacles to 40 obstacles. Whenever an
obstacle was constructed, a trace was appended be-
tween the last trace and the second last trace contain-
ing the obstacle. The model was evaluated using mod-
elchecker, NuSMV (Cimatti et al., 2000). The ethi-
cal decision-making in this case is the selection of the
trace in the model representing a path without obsta-
cles in the airport, taken by the aircraft.
The aircraft begins in a stopped mode and transitions
to various states – navigating the states that would im-
ply a crash into an obstacle. The following are some
of the actions represented using deontic logic. The
examples are:
1. Obligatory Actions: The aircraft is obligated to
move forward into take-off mode if the aircraft
does not encounter an obstacle.
2. Forbidden Actions: It is forbidden for the aircraft
to turn right at distance 100 feet if it encounters
obstacle 1.
3. Permissible Actions: It is permissible for the air-
Formal Analysis of Deontic Logic Model for Ethical Decisions
221

craft to move forward.
The forbidden action, F
/
0
does not impede the move-
ment of the aircraft. However, meeting an obstacle
means the motion of the aircraft has ceased and a
forbidden action is prevented. The prevention of the
forbidden action is represented by the self-loop in Fig
2. The a-outcomes are generated with the presence of
F
/
0
in the t-actions.
Fig 2 represents the movements of the aircraft such
as start, move forward (move forward), turn right
(turn right and take off (take off). Notation for the
distance are 0 feet, 50 feet etc are represented by
d 0 and d 50, respectively. The obstacles, obstacle
1 and obstacles 2 are represented by obst 1 and
obst 2. No obstacles are represented by none.
The ethical set of actions that leads to success-
ful take off (without hitting an obstacle) is given
by the trace (sequence of t-actions),π. Formally,
π = ⟨stop, d 0,none⟩,⟨move forward,d 0, none⟩,
⟨move forward,d 50, none⟩,⟨turn right, d 50, none⟩,
⟨turn right,d 50, none⟩,⟨move forward,d 150,none⟩,
⟨move
forward,d 0,take off⟩. For brevity, none is
not shown on the states of the state labeled graph in
Figure 2. Experiments are conducted by running the
CTL queries on a machine. Results were gathered
and queries were ran on a Windows 64-bit operating
system, x64-based processor with configuration:
Intel(R) Core(TM) i7-4790 CPU @ 3.60GHz with
RAM: 24.0 GB. Below is an example of modeling
safe aircraft take-off with respect to the airport con-
figuration based on multiple obstacles. The following
CTL formulas were posed as queries to the model to
evaluate the computational feasibility of the model
abstraction.
Q1. Is there a path where it is possible that the air-
craft will eventually take off? CTL formula-
EF(aircraft movement = take off)
Q2. Is there a path where it is possible at every point
that the aircraft’s movement will either be moving
forward, stopped, turning right or take off? CTL
formula, EG(aircraft movement = move forward
| aircraft movement = stop | aircraft movement =
turn | aircraft movement = take off);
Q3. Is there a path where the aircraft’s movement
is stopped at some point? CTL formula,
EF(aircraft movement = stop)
Q4. Is there a path where the distance reached is even-
tually reach a distance of 150 at some point from
the starting position? CTL query, EF(distance =
d 150)
Q5. In all the paths, is the distance covered by the air-
craft never reaches distance of 250? AG(distance
!= d 250) Note: The query should sometimes re-
turn False depending on the size of the model.
Q6. Is there a path where the aircraft encounters ob-
stacle 2 at some point EF(obstacles = obst 2)
Table 1 represents the execution times of the CTL
queries for the airport configuration. As can be seen,
larger problem sizes, such as those with 40 obstacles,
are still able to execute the queries in reasonable time,
and the times for execution of the queries are scal-
able. Different lengths of the queries are also evalu-
ated. and the time recorded for the completion of the
query with longest length Q2 scales well for different
problem sizes.
Table 1: Execution times (in milliseconds) for different
queries (Q) with varying number of obstacles (obst). An
example NuSMV code is in Appendix A.
Time (in milliseconds)
Q 3 obst 5 obst 7 obst 10 obst 15 obst 20 obst 40 obst
Q1. 59.63 55.90 59.05 61.33 61.55 65.99 74.39
Q2. 59.68 58.32 60.72 58.38 61.65 63.22 74.39
Q3. 58.09 59.85 56.98 59.23 61.41 66.90 73.79
Q4. 57.11 61.36 60.59 60.16 60.24 61.72 76.06
Q5. 102.28 108.71 103.03 104.96 105.88 114.15 115.74
Q6. 40.88 44.86 43.08 41.34 44.52 48.06 52.31
6 CONCLUSION
In this work, a reasoning mechanism using temporal
logic is constructed using deontic logic rules to iden-
tify ethical actions. The model abstraction based on
concepts of obligation, permissible and forbidden ac-
tions. The formalism is constructed by minimal as-
sumptions and it considers all the permissible actions
conforming to the deontic logic rules. In this formal-
ism, the knowledge of forbidden actions are required
only. The formal reasoning on the model abstraction
provides the user a plan of actions that is ethically ad-
missible. The prototype of aircraft take off was used
in the experimental evaluation for the computational
feasibility of the model abstraction. The recorded
times for the sample CTL queries proved that the for-
malism is scalable. This work forms foundation for
construction of multiagent concurrent framework for
handling ethical decision making using deontic logic.
For example, modeling movement of multiple un-
manned autonomous vehicles landing and taking-off.
One of the future directions of research will be to
construct a model that would incorporate uncertainty
in the motion of the aircraft where probabilistic model
checking can be performed. Additionally, it will be
critical to address uncertainty in the environment that
may impact ethical consirations of the motion of an
aircraft.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
222
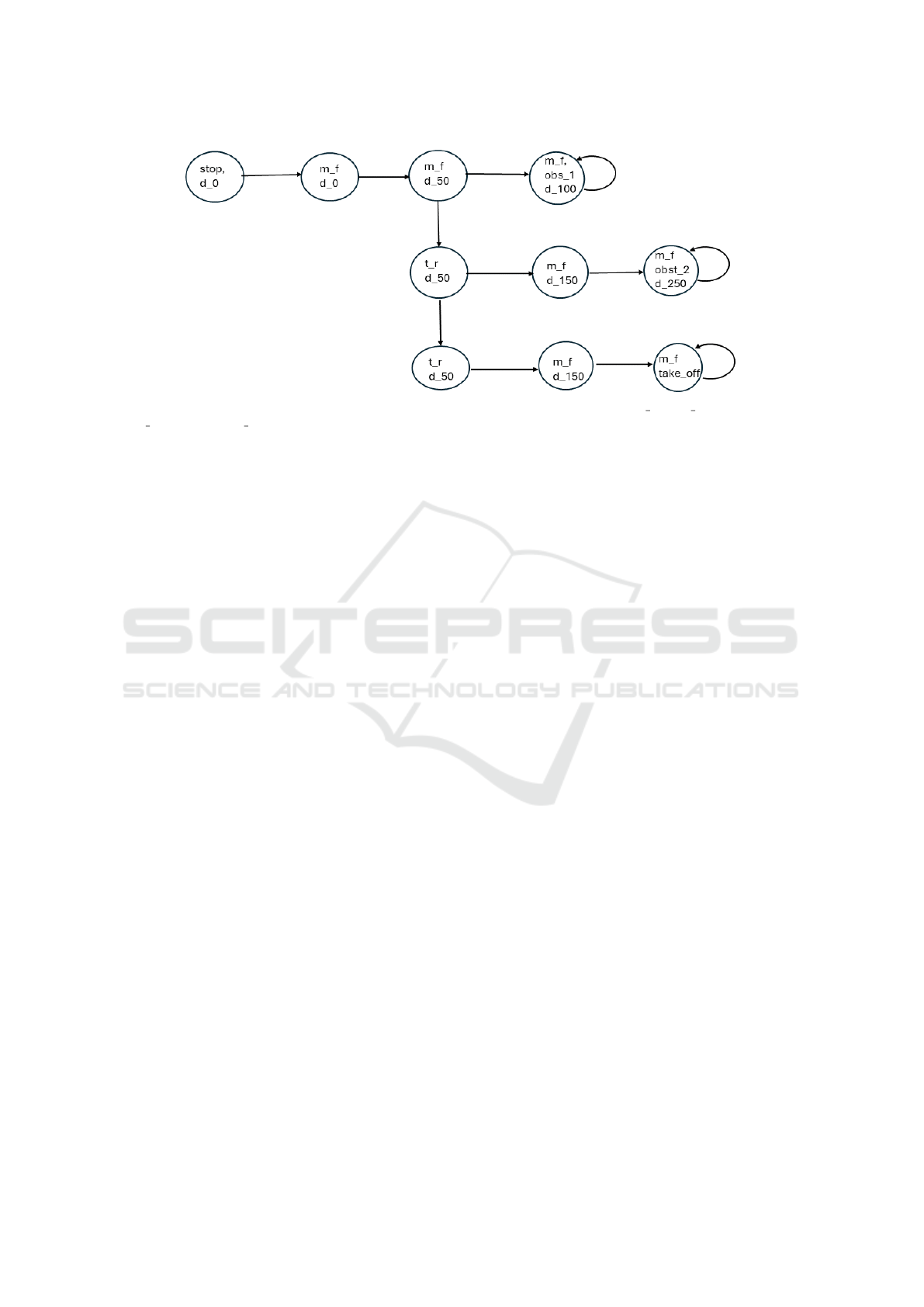
Figure 2: The figure above shows a visualization of the state labeled graph. Notation: m f and t r imply the actions,
move forward and turn right, respectively.
ACKNOWLEDGEMENTS
The work is supported by NASA grant
80NSSC23M0166 and is a part of NASA EPSCoR
Rapid Research Response 2023 grant.
REFERENCES
Abeywickrama, D. B., Cirstea, C., and Ramchurn, S. D.
(2019). Model checking human-agent collectives for
responsible ai. In 2019 28th IEEE International Con-
ference on Robot and Human Interactive Communica-
tion (RO-MAN), pages 1–8. IEEE.
Arechiga, N. (2019). Specifying safety of autonomous vehi-
cles in signal temporal logic. In 2019 IEEE Intelligent
Vehicles Symposium (IV), pages 58–63. IEEE.
Balasubramaniam, N., Kauppinen, M., Kujala, S., and
Hiekkanen, K. (2020). Ethical guidelines for solving
ethical issues and developing ai systems. In Interna-
tional Conference on Product-Focused Software Pro-
cess Improvement, pages 331–346. Springer.
Bonnemains, V., Saurel, C., and Tessier, C. (2018). Em-
bedded ethics: some technical and ethical challenges.
Ethics and Information Technology, 20:41–58.
Cimatti, A., Clarke, E., Giunchiglia, F., and Roveri, M.
(2000). Nusmv: a new symbolic model checker. In-
ternational journal on software tools for technology
transfer, 2:410–425.
Clarke, E., Emerson, E., and Sistla, A. (1986). Automatic
verification of finite-state concurrent systems using
temporal logic specifications. ACM Transactions
on Programming Languages and Systems (TOPLAS),
8(2):244–263.
Clarke, E. M. (1997). Model checking. In Foundations of
Software Technology and Theoretical Computer Sci-
ence: 17th Conference Kharagpur, India, December
18–20, 1997 Proceedings 17, pages 54–56. Springer.
Dennis, L., Fisher, M., Slavkovik, M., and Webster, M.
(2016). Formal verification of ethical choices in au-
tonomous systems. Robotics and Autonomous Sys-
tems, 77:1–14.
Dignum, V., Baldoni, M., Baroglio, C., Caon, M., Chatila,
R., Dennis, L., G
´
enova, G., Haim, G., Kließ, M. S.,
Lopez-Sanchez, M., et al. (2018). Ethics by design:
Necessity or curse? In Proceedings of the 2018
AAAI/ACM Conference on AI, Ethics, and Society,
pages 60–66.
Fisher, M., Mascardi, V., Rozier, K. Y., Schlingloff, B.-H.,
Winikoff, M., and Yorke-Smith, N. (2021). Towards
a framework for certification of reliable autonomous
systems. Autonomous Agents and Multi-Agent Sys-
tems, 35:1–65.
Furbach, U., Schon, C., and Stolzenburg, F. (2014).
Automated reasoning in deontic logic. In Multi-
disciplinary Trends in Artificial Intelligence: 8th In-
ternational Workshop, MIWAI 2014, Bangalore, In-
dia, December 8-10, 2014. Proceedings 8, pages 57–
68. Springer.
Gabbay, D., Horty, J., Parent, X., Van der Meyden, R.,
van der Torre, L., et al. (2021). Handbook of deon-
tic logic and normative systems. College Publications,
2021.
Huth, M. and Ryan, M. (2004). Logic in Computer Science:
Modelling and reasoning about systems. Cambridge
university press.
Luckcuck, M., Farrell, M., Dennis, L. A., Dixon, C., and
Fisher, M. (2019). Formal specification and verifica-
tion of autonomous robotic systems: A survey. ACM
Computing Surveys (CSUR), 52(5):1–41.
Mermet, B. and Simon, G. (2016). Formal verication of eth-
ical properties in multiagent systems. In 1st Workshop
on Ethics in the Design of Intelligent Agents.
Roberson, T., Bornstein, S., Liivoja, R., Ng, S., Scholz,
J., and Devitt, K. (2022). A method for ethical ai in
defence: A case study on developing trustworthy au-
tonomous systems. Journal of Responsible Technol-
ogy, 11:100036.
Shea-Blymyer, C. and Abbas, H. (2022). Generating deon-
tic obligations from utility-maximizing systems. In
Proceedings of the 2022 AAAI/ACM Conference on
AI, Ethics, and Society, pages 653–663.
Formal Analysis of Deontic Logic Model for Ethical Decisions
223
