
Formalization of Pre-Learning Instructional Method Based on
Information Processing of Learner Driver
Yuta Kurihara
1
, Motoki Shino
2
, Wataru Miyazaki
3
, Minori Kizaki
3
, Katsuko T. Nakahira
4 a
and
Muneo Kitajima
4 b
1
Department of Human & Engineered Environmental Studies, The University of Tokyo,
Kashiwanoha, Kashiwa, Chiba, Japan
2
Department Mechanical Engineering, Tokyo Institute of Technology, Ookayama, Tokyo, Japan
3
Minami Holdings Co., Ltd., Onojo, Fukuoka, Japan
4
Department of Information & Management Systems Engineering, Nagaoka University of Technology,
Nagaoka, Niigata, Japan
Keywords:
Driving Skill Acquisition, Driver Training, Formalization of Instructional Methods, Cognitive Processing.
Abstract:
This study aims to formalize instructional methods for driving skill acquisition by examining learner drivers’
information processing during instruction. To examine the effects of pre-learning on skill development, ex-
periments were conducted to analyze how procedural knowledge provided before practice influences skill
acquisition. The experiment focused on two tasks: lane changes, which require precise execution of proce-
dures at moderate speeds, and S-curve navigation, which involves controlling a vehicle on narrow roads. The
results indicate that, for tasks requiring procedural accuracy, such as lane changes, providing procedural steps
as semantic knowledge before practice facilitated their conversion into procedural memory through verbal rep-
etition and stationary practice. In contrast, for S-curve navigation, effective skill acquisition was achieved by
managing vehicle speed through intermittent stops. This approach reduced working memory load and enabled
learners to more effectively predict vehicle position and orientation. This study underscores the importance
of tailoring pre-learning strategies to the specific demands of each task and contributes to the development of
instructional designs that enhance the efficiency and effectiveness of driving education.
1 INTRODUCTION
Driving skills require the integration of perception,
judgment, and motor operation, making effective ed-
ucation essential for cultivating safe drivers. In Japan,
driving schools play a central role, with government-
certified instructors providing personalized guidance
based on standardized requirements (National Po-
lice Agency, 2022). At these schools, government-
certified instructors provide personalized guidance to
learner drivers, resulting in variations in instructional
quality depending on the instructor’s background.
Traditionally, skill education has relied on prac-
titioners’ intuition and experience. In recent years,
efforts have been made to formalize experts’ tacit
knowledge, transforming it into explicit knowledge
and integrating it into educational processes through
a
https://orcid.org/0000-0001-9370-8443
b
https://orcid.org/0000-0002-0310-2796
digital transformation (DX). In sports, formalizing
expert movements and enabling novices to observe
and replicate these actions have been shown to signif-
icantly enhance skill acquisition (Nuruki et al., 2011).
Similarly, in piano education, an approach where be-
ginners compare videos of their own movements with
those of experts has been formalized, demonstrating
the effectiveness of e-learning materials based on this
method (Nakahira et al., 2011).
DX-based approaches have been explored for
driving skills. For instance, systems aiding steering
timing during reverse parking have been shown to re-
duce errors (Duan et al., 2019). Additionally, meth-
ods targeting perception and decision-making have
been developed to enhance learners’ hazard recogni-
tion (Crundall et al., 2017).
Despite these advancements, the processes in-
volved in acquiring driving operation skills remain
underexplored, particularly regarding how learner
drivers process instructional content and translate it
682
Kurihara, Y., Shino, M., Miyazaki, W., Kizaki, M., Nakahira, K. T. and Kitajima, M.
Formalization of Pre-Learning Instructional Method Based on Information Processing of Learner Driver.
DOI: 10.5220/0013389400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 682-689
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
into actions. While previous studies have focused
on specific operations, such as reverse parking, using
technical approaches, instructional methods integrat-
ing real-time feedback and appropriate timing are yet
to be fully clarified. Consequently, methods that con-
sider novice drivers’ cognitive processes remain un-
derdeveloped, and essential insights for constructing
effective instructional designs are still lacking.
In response to these challenges, this study aims
to formalize instructional methods for driving skills
by analyzing learner drivers’ behaviors and instructor
guidance, with a focus on cognitive processes during
skill acquisition. To achieve this, the study examines
the information processing underlying skill acquisi-
tion. Section 2 defines the targeted skills and out-
lines the assumed information processing framework
to establish a theoretical basis. Section 3 describes the
experiments to evaluate current instructional methods
while section 4 analyzes the results to clarify the in-
formation processing required for skill acquisition.
2 THEORETICAL FRAMEWORK
AND TARGET SETTING FOR
SKILL ACQUISITION
This section establishes the theoretical framework
for analyzing the skill acquisition process of learner
drivers and introduces models to understand the fun-
damental information processing involved in skill
learning. The specific skills targeted in this study are
then identified, and key focus points for instructional
methods are defined in this research.
2.1 Assumed Information Processing
Fitts’ three-stage model (Fitts and Posner, 1967) pro-
vides the theoretical foundation for understanding
skill learning. This model describes skill acquisition
as progressing through three stages. The first, the
cognitive stage, involves learners acquiring knowl-
edge of the new skill and understanding the associ-
ated procedures. The second, the associative stage,
focuses on enhancing the skill’s efficiency and ac-
curacy through repeated practice. Finally, the au-
tonomous stage is achieved, where the skill becomes
automatic, enabling learners to allocate attention to
other tasks. Based on this model, instructional meth-
ods should align with learners’ progress through these
stages, emphasizing the appropriate timing and con-
tent of guidance.
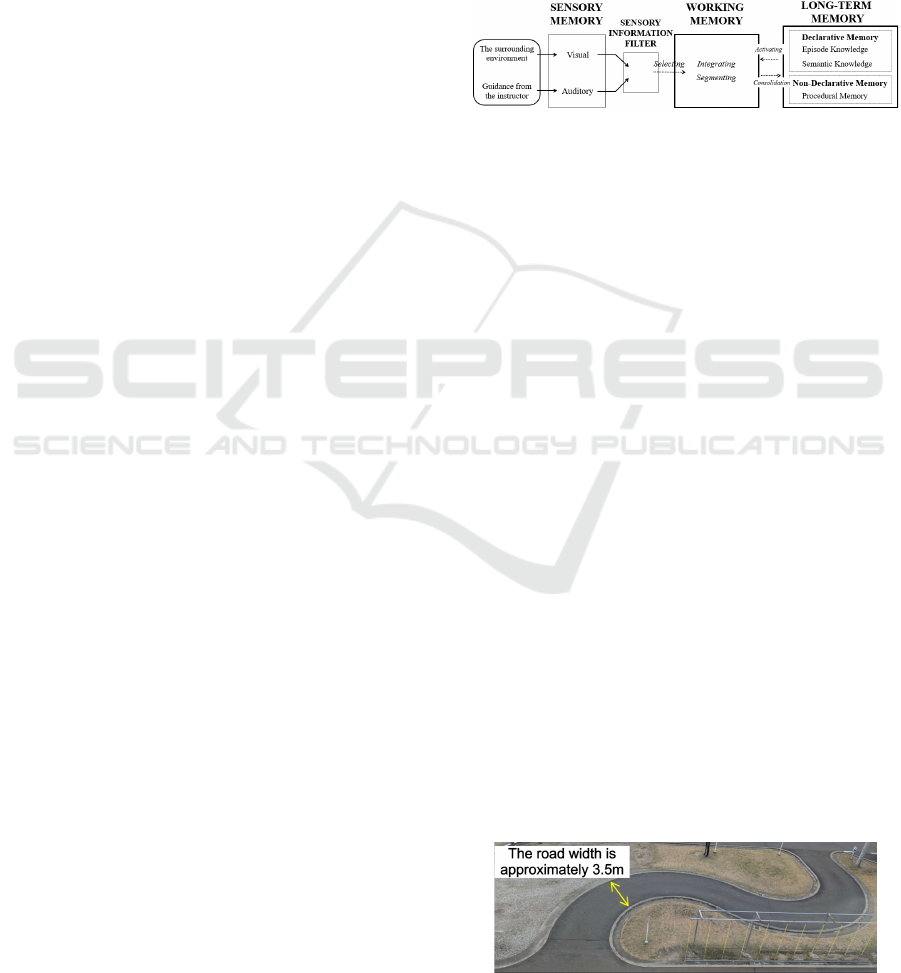
Additionally, the Cognitive Model (Moreno and
Mayer, 2007) is employed to analyze how learner
drivers process information and acquire skills. As
shown in Figure 1, external information enters work-
ing memory, activates related long-term memory,
and is then processed and translated into motor ac-
tions. Conversely, processed information is inte-
grated into long-term memory, which includes declar-
ative memory (semantic memory for knowledge and
language, and episodic memory for personal ex-
periences) and non-declarative memory (procedural
memory for skills and habits).
Figure 1: The cognitive model for skill acquisition (Moreno
and Mayer, 2007).
Using these two models, this study investigates
how instructors’ guidance is integrated into learners’
memory, forms procedural memory, and facilitates
skill acquisition based on the timing of instruction.
2.2 Research Targets
To understand the information processing involved in
learner drivers’ acquisition of driving operation skills,
this study defines the targeted skills. In Japanese driv-
ing schools, training is divided into two phases: the
first focuses on skill acquisition within the driving
school, while the second involves developing these
skills on public roads. This study focuses on the first
phase, emphasizing the acquisition of new skills. For
learners who have already mastered basic operations,
such as starting and cornering, instructional items can
naturally be categorized into two main groups.
The first category consists of training items aimed
at learning actions regulated by traffic rules. For in-
stance, tasks such as lane changes and obstacle avoid-
ance require learners to perform precise visual checks
and execute vehicle operation procedures accurately
and efficiently The second category involves tasks
that develop learner’s ability to estimate the vehicle’s
position relative to the road using visual informa-
tion. As shown in Figure 2, these tasks enhance spa-
tial awareness, helping learners navigate narrow roads
Figure 2: The S-curve used in driving training.
Formalization of Pre-Learning Instructional Method Based on Information Processing of Learner Driver
683

by determining appropriate paths and speeds. Exam-
ples include navigating S-curves and L-shaped crank
courses. Based on these two categories, this study tar-
gets lane changes and S-curve navigation as represen-
tative tasks for actions regulated by traffic rules and
tasks requiring spatial awareness.
2.3 Targeted Learning Based on
Current Instructional Methods
Based on survey, current instructional methods for
lane changes and S-curve navigation are structured
into three stages: pre-learning (before practice), prac-
tice, and feedback (after practice).
During pre-learning, instructors explain the proce-
dures using training manuals. For lane changes, they
outline the required steps, while for S-curve naviga-
tion, they emphasize maintaining low speed before
detailing the navigation process. Learners then prac-
tice on the actual course and receive feedback after-
ward. When aligned with the information process-
ing model in Figure 1, pre-learning guidance primar-
ily helps learners store procedural steps as seman-
tic memory in long-term memory. During practice,
learners use this memory to perform driving opera-
tions, converting the knowledge into procedural mem-
ory and acquiring skills. Feedback allows learners to
reflect on experiences stored as episodic memory, en-
hancing their understanding.
Among these instructional phases, pre-learning is
considered the most influential for practice and feed-
back. Therefore, this study focuses on pre-learning,
specifically examining and comparing the practice be-
haviors of learners who successfully acquired skills
with those who did not after pre-learning. This anal-
ysis aims to identify the information processing re-
quired for skill acquisition after learners memorize
new skills during the pre-learning phase. Based on
these insights, the study seeks to formalize instruc-
tional methods grounded in learners’ information pro-
cessing, as outlined in Section 1, specifically within
the context of pre-learning.
3 PRE-LEARNING EXPERIMENT
This section presents an experiment designed to for-
malize effective instructional methods by evaluating
the impact of pre-learning procedural information on
skill acquisition. Learners studied pre-learning mate-
rials based on instructors’ guidance, and their proce-
dural accuracy was measured during subsequent prac-
tice to evaluate the effectiveness of skill acquisition.
The participants were 10 learner drivers evaluated as
having acquired basic driving skills after completing
training.
3.1 Evaluation
To evaluate skill acquisition, a sensor-equipped in-
structional vehicle was used to measure driving per-
formance, including speed, steering angle, and self-
position estimation (Figure 3). Since visual behavior
is a key indicator of driving performance (Land and
Lee, 1994), a gaze tracking device (Tobii Pro Glasses
2) was also employed to record learners’ visual be-
havior. The recorded data were logged as time-series
fixation targets, as shown in Figure 5.
For lane changes, the evaluation metric focused on
the accuracy of following the instructed procedures.
Skill acquisition was considered successful if learn-
ers executed the procedures correctly before the third
practice attempt. For S-curve navigation, the evalu-
ation criteria included the avoidance of wheel drop-
offs, along with the accuracy of vehicle operation and
visual behavior. A “wheel drop-off” was defined as
a situation where a tire completely falls off the edge
of the road or where more than half of the tire width
extends beyond the road curb. To rule out random
success, skill acquisition was deemed successful if
learners completed both the second and third attempts
without wheel drop-offs.
Figure 3: The vehicle used for driving instruction (Handa
et al., 2023).
3.2 Procedure
In this experiment, learner drivers first drove around
the outer loop of the training course to become famil-
iar with driving. Next, for lane changes, participants
studied the pre-learning materials shown in Figure 4
for 5 minutes and then took a written memory test
on the procedure. Those who did not achieve a per-
fect score repeated this study and test process until
they accurately reproduced the procedure in writing,
confirming that participants had memorized the pro-
cedure. They then drove the lane change course three
times as practice. After completing the lane change
experiment, the same procedure was applied to the
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
684

S-curve course. If a wheel drop-off occurred during
practice, the vehicle’s automatic braking system (Fig-
ure 3) was activated, and the experimenter intervened
to help the participant return to the course.
(a) Pre-learning material for lane change
(b) Pre-learning material for S-course
Figure 4: Pre-learning materials.
3.3 Experimental Results
3.3.1 Lane Change
Among the 10 participants, one was excluded because
they had already received prior instruction on lane
changes. Among the remaining 9 participants, only
one (Participant A) successfully performed the pro-
cedure accurately by the third attempt. For the re-
maining participants, omissions or order errors per-
sisted through the third attempt. In particular, during
the third attempt, all 8 participants skipped the right-
rear check (Step 3), 2 omitted the side mirror check
(Step 3), and 1 performed steps 1 to 3 out of order.
Changes in procedural accuracy across practice at-
tempts were analyzed to observe patterns in partici-
pants’ performance. Participant A showed progres-
sive improvement, initially omitting steps 1 and 3 but
completing all steps by the third attempt. Among
the other 8 participants, 2 exhibited gradual improve-
ment, while 3 showed no change, and 3 experienced a
decline, failing to execute previously completed steps.
In summary, only Participant A achieved full pro-
cedural accuracy by the third attempt, whereas the
majority (6 participants) showed no improvement or
declined in performance despite repeated practice.
3.3.2 S-Curve Navigation
Among the 10 participants, 3 successfully acquired
the skill, while 7 did not. Figure 5 shows the rela-
tionship between visual behavior and vehicle speed
for one participant who acquired the skill. The hori-
zontal axis represents the time from S-curve entry to
exit. The left vertical axis indicates gaze targets, with
each rectangular bar showing the object being fixated
on and the duration of fixation. The colors of the rect-
angles correspond to steps 1–5 in Figure 4. The right
vertical axis displays vehicle speed as a gray line.
Based on the graph, the participant’s speed inter-
mittently dropped to zero during the first attempt. In
terms of visual behavior, the participant primarily fo-
cused on the curbs on both sides at the entrance of
the S-curve and on the right curb during the left turn,
consistent with the pre-learning material. In contrast,
during the second and third attempts, the participant
maintained a continuous speed while keeping their
gaze consistently on the same targets. The other two
participants who successfully acquired the skill dis-
played similar patterns of behavior.
In contrast, examples of participants who failed
to acquire the skill are provided. Three participants
who did not intermittently stop during the first at-
tempt all experienced wheel drop-offs in subsequent
attempts. Additionally, four participants who initially
reduced their speed intermittently still experienced
wheel drop-offs. Figure 6 compares the driving op-
erations of one such participant with those of the par-
ticipant shown in Figure 5. Figure 6 illustrates the first
50 seconds of S-curve navigation, with the left verti-
cal axis representing speed and the right vertical axis
representing the steering angle, where negative values
indicate right turns and positive values indicate left
turns. The left graph shows data from a participant
who failed to acquire the skill and experienced wheel
drop-offs, while the right graph represents the first at-
tempt of a participant who successfully acquired the
skill. By comparing these graphs, as highlighted by
circles in the figure, participants who successfully ac-
quired the skill made gradual adjustments to the steer-
ing angle, while those who failed made abrupt and
rapid steering movements.
In summary, the differences between successful
and unsuccessful participants can be attributed to two
key factors: effective speed management, particularly
the ability to execute intermittent stops, and gradual
steering adjustments.
4 DISCUSSION
The experimental results reveal that memorizing pro-
cedures through pre-learning materials and practicing
based solely on that memorization may sometimes be
insufficient for learner drivers to fully acquire skills.
However, some learners successfully acquired skills
Formalization of Pre-Learning Instructional Method Based on Information Processing of Learner Driver
685
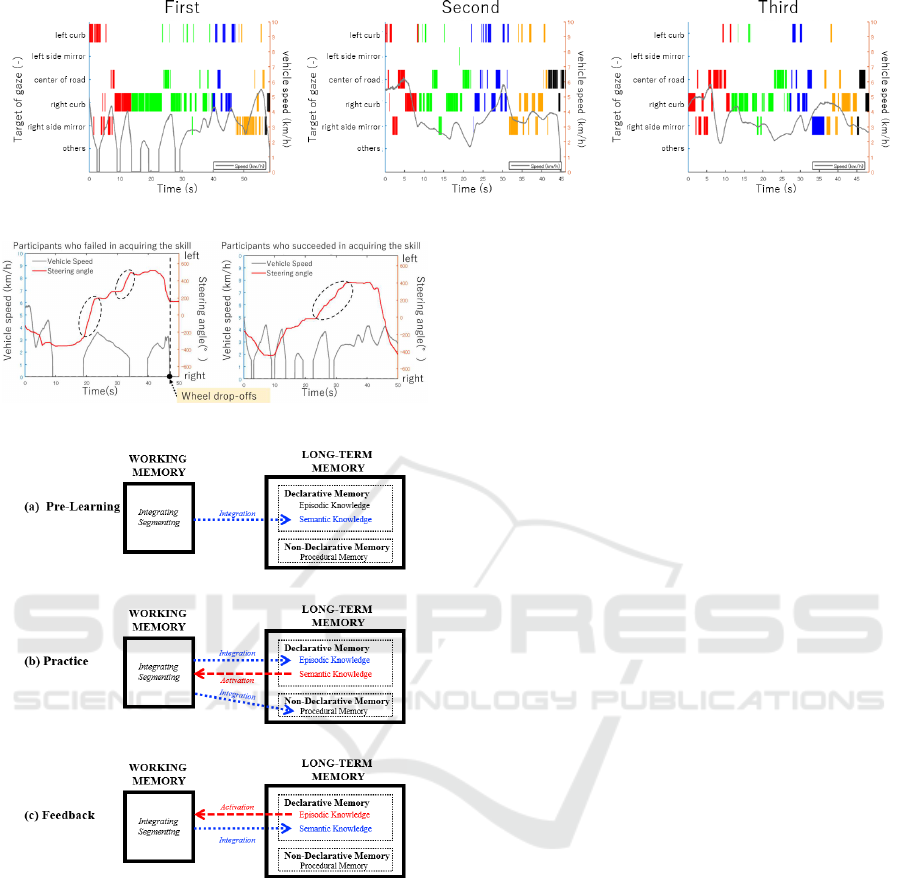
Figure 5: Visual behavior and vehicle speed during S-curve navigation.
Figure 6: Comparison of steering operations.
Figure 7: Information processing based on timing.
despite identical memorization tasks, suggesting that
differences in information processing during the prac-
tice phase influenced these outcomes.
This study organizes the instructional content pro-
vided by experienced instructors during practice and
feedback sessions for each skill. By analyzing this
content, the study clarifies the information processing
required of learner drivers and examines how these
factors contribute to skill acquisition. Finally, the
study formalizes pre-learning instructional methods
based on the observed confirmation and operational
behaviors of learners, as well as the guidance pro-
vided by experienced instructors.
4.1 Analysis of Instructional Content
This section examines instructional content during
pre-learning, practice, and feedback, using the infor-
mation processing model described in Section 2.3.
The analysis relies on the framework shown in Fig-
ure 1, which illustrates how information is processed
after entering working memory through sensory fil-
ters. The figure shows how procedural information,
acquired as Semantic Knowledge during pre-learning,
is gradually transformed into Procedural Memory
through practice and feedback. This transformation
forms the foundation for analyzing the role of instruc-
tional methods in skill acquisition.
Instructional content was collected from instruc-
tors’ verbal guidance, gestures, and recorded driving
behavior data. Additionally, learners’ behavior was
measured using the training vehicle (Figure 3) and the
gaze tracking device (Tobii Pro Glasses 2) described
in Section 3.1, as instructional content may change
depending on learners’ driving behavior.
4.2 Lane Change
4.2.1 Analysis of Lane Change Instruction
The instructional methods of experienced instructors
for lane changes were analyzed, focusing on their ef-
fectiveness. Based on Figure 7, the following instruc-
tional practices were identified: First, during the pre-
learning phase, the instructors taught the procedures
described in Figure 4. During the practice phase, re-
gardless of the learner, experienced instructors pro-
vided concise verbal cues, such as ”rearview mirror”
and ”signal”, which represented each step at the ap-
propriate timing. Finally, during the feedback phase,
instructors pointed out learners’ mistakes, reviewed
the procedures verbally with them, and guided them
to rehearse and execute the procedures in a stationary
vehicle.
The impact of this instructional content on skill
acquisition is analyzed based on Figure 7. First, dur-
ing the pre-learning phase, learners retained procedu-
ral information as semantic knowledge. During the
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
686

practice phase, this was activated through visual and
auditory inputs from the road environment and in-
structor cues, resulting in motor outputs. Therefore,
semantic knowledge must be easy to activate and ap-
plicable during practice. To evaluate this condition,
the procedural instruction was assessed using Cog-
nitive Load Theory (Sweller, 1988), which catego-
rizes cognitive demands into intrinsic load (task com-
plexity), extraneous load (unnecessary elements in the
learning environment), and germane load (elements
that facilitate learning). According to this theory, by
excluding additional information—such as explana-
tions of why certain actions are necessary—and fo-
cusing solely on procedural execution, learners can
concentrate on the steps themselves, reducing task
complexity and minimizing intrinsic load. This ap-
proach ensures that the provided semantic knowledge
meets the condition of being easy to activate and di-
rectly applicable to motor outputs during practice.
During the practice phase, providing only key-
words representing each step likely served, as shown
in Figure 7(b), to trigger learners’ procedural memory
through external stimuli. This approach is considered
effective for tasks like lane changes, where precise ac-
tions must be performed within a short time, as it fa-
cilitates the rapid transformation of activated memory
into motor outputs. Furthermore, since the capacity
of Working Memory is limited, supporting the acti-
vation of already provided information without intro-
ducing new elements likely plays a role in reducing
extraneous load.
Finally, regarding feedback, verbalizing proce-
dural steps has been shown to generally enhance
the accuracy and speed of subsequent motor actions
(Guadagnoli et al., 1992). Additionally, repeating the
steps in a stationary state allows learners to review
them in a low cognitive load environment, facilitating
their transformation into procedural memory in ad-
vance. Therefore, by ensuring that learners accurately
recognize their mistakes and rehearse the steps in a
stationary vehicle, it is believed that they retain ver-
balized semantic knowledge that is easily converted
into procedural memory, alongside procedural mem-
ory developed in a stationary state. This preparation
aids in performing high-speed lane changes in subse-
quent practice.
In summary, pre-learning instruction provided
learners with semantic knowledge that could be effec-
tively transformed into procedural memory. During
practice and feedback, the instruction focused on aid-
ing this transformation, facilitating skill acquisition.
4.2.2 Formalizing Instructional Content Based
on Learner Drivers’ Behavior
Based on the previous section and as described in Sec-
tion 3.3.1, this discussion examines the factors that
led to omissions in procedural execution during prac-
tice, despite learners retaining information about the
procedures. Lane changes require quick execution of
steps at vehicle speeds of 10–20 km/h, and in this ex-
periment, the lack of support for activating semantic
knowledge during practice likely resulted in delayed
activation. In contrast, feedback involving verbaliza-
tion of the steps and repetition in a stationary vehi-
cle likely facilitated the transformation into procedu-
ral memory. These findings suggest that for skills re-
quiring procedural execution at higher speeds, retain-
ing procedures as semantic knowledge alone is insuf-
ficient; verbalized guidance and repetition in a sta-
tionary environment are effective.
Additionally, the low number of participants who
improved procedural accuracy with increased practice
is discussed. Unlike tasks such as avoiding wheel-
drops in an S-curve, lane changes lack easily recog-
nizable error indicators, and participants may have
mistakenly believed they executed the steps correctly
without adjusting their behavior. This limitation, due
to the lack of feedback, highlights the necessity of
providing feedback for procedural improvement.
4.3 S-Curve Navigation
4.3.1 Analysis of S-Curve Navigation Instruction
Similar to the lane change instruction, the instruc-
tional content for S-curve navigation is summarized
as follows: During the pre-learning phase, as shown
in Figure 4, instructors emphasized the importance of
low-speed control using the brakes before teaching
the specific steps for navigating the S-curve.
During the practice phase, instruction varied
based on learner performance. For learners driv-
ing at excessive speed, instructors focused solely on
speed control using the brakes. For those maintain-
ing an appropriate speed, instructors provided addi-
tional guidance, such as encouraging them to look
further ahead along the curve to guide their visual be-
havior. For learners who started steering too early in
left curves, instructors avoided direct intervention, in-
stead prompting them to consider whether the front-
right wheel was aligned with the outer edge of the
curve, helping them recognize their steering errors.
In the feedback phase, instructors emphasized the
importance of speed control for learners who drove
too fast, explaining that excessive speed limited their
ability to predict vehicle positioning. They also
Formalization of Pre-Learning Instructional Method Based on Information Processing of Learner Driver
687

guided learners on how to increase awareness of ve-
hicle position and orientation. For example, they ex-
plained that even if the right curb was no longer visi-
ble, the front-right wheel remained aligned under the
driver’s feet, allowing for further adjustments. In-
structors also taught learners to predict vehicle move-
ments based on steering inputs, encouraging them to
set the steering angle, observe the vehicle’s response,
and make adjustments as needed.
The impact of this instructional content is ana-
lyzed using the information processing model in Fig-
ure 7. Procedural guidance is comparable to that pro-
vided for lane changes. The effect of speed manage-
ment during course navigation is also analyzed. In
S-curve navigation, in addition to activating Seman-
tic Knowledge, it is necessary to predict vehicle posi-
tion and orientation based on visual information from
the road environment and to execute precise maneu-
vers accordingly. Practicing at low speeds not only
allows sufficient time for activating procedural mem-
ory but also allocates more Working Memory capac-
ity to vehicle control based on visual inputs, as il-
lustrated in Figure 7(b). As a result, even though
S-curve navigation involves additional tasks, such as
predicting vehicle position and orientation compared
to lane changes, cognitive load can be effectively re-
duced. The emphasis on strict speed management
during practice serves the same purpose.
As shown in Figure 7(c), feedback focused on
guiding learners to adjust their visual and operational
behaviors based on their practice memories retained
as Episodic Knowledge. For example, learners who
experienced wheel drop-offs in left curves were in-
structed on the necessity of predicting vehicle posi-
tion and orientation using visual inputs, as well as
methods to correct their steering. This approach fos-
ters self-feedback, which is essential in the associative
stage of skill acquisition (Fitts and Posner, 1967). By
helping learners understand the relationship between
visual inputs, vehicle control, and the outcomes of
their actions based on Episodic Knowledge, the re-
tention of driving skills can be effectively promoted.
In summary, the pre-learning phase emphasized
speed management to free up Working Memory ca-
pacity, enabling learners to focus on predicting ve-
hicle position and orientation. During practice and
feedback, learners were guided to understand the rela-
tionship between visual information and vehicle con-
trol based on the outcomes of their actions.
4.4 Formalizing Instructional Content
Based on Learner Drivers’ Behavior
The differences between participants who success-
fully acquired the skills and those who did not are an-
alyzed, focusing on two key points: intermittent stop-
ping, and fine steering adjustments. This discussion
particularly emphasizes intermittent stopping related
to speed management, which was a primary focus of
instructor guidance.
Based on the instructors’ guidance, this behav-
ior was effective for skill acquisition in two main
ways during subsequent practice sessions. First, in-
termittent stopping allowed participants to focus on
key visual targets and allocate more working mem-
ory capacity to processing visual information, such
as predicting vehicle position and orientation within
the S-curve. After resuming movement, participants
could concentrate on vehicle control based on their
prior predictions, which improved their overall per-
formance.
Second, as illustrated in Figure 7(c), intermittent
stopping enabled participants to verify whether their
predicted vehicle position and orientation matched
the actual vehicle behavior during short-distance
movements. This process facilitated more accurate
execution of steering corrections, as emphasized in
the instructional content.
4.5 Formalization of Instructional
Methods in Pre-Learning
Based on the identified information processing char-
acteristics of learner drivers, pre-learning instruc-
tional methods are summarized in Table 1. For lane
changes, memorizing the steps in a verbalized for-
mat and practicing them in a stationary vehicle fa-
cilitates their transformation into procedural memory,
making it easier to convert the information into proce-
dural memory. For S-curve navigation, both procedu-
ral and speed management information are retained as
Semantic Knowledge, with intermittent stopping used
to optimize working memory for predicting vehicle
position and orientation, as well as executing corre-
sponding maneuvers.
5 CONCLUSION
This study aimed to formalize instructional methods
in driving education by focusing on the information
processing characteristics of learner drivers. Specif-
ically, the effects of pre-learning instruction on skill
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
688

Table 1: Formalization of pre-learning instructional methods.
Category Objective Reason
Lane Change
Memorize procedural information in a ver-
bal format and practice in a stationary state.
To allocate sufficient working memory for con-
verting actions into motor outputs.
S-Curve
Navigation
Memorize low-speed control with intermit-
tent stops.
To allocate working memory for predicting vehi-
cle position and orientation, and for associated op-
erations.
acquisition were experimentally evaluated, and the in-
structional content was analyzed based on instructors’
guidance. As a result, the instructional methods were
formalized as follows: For tasks like lane changes,
which require the accurate execution of procedures
at a consistent speed, procedural steps are retained in
a verbalized format and practiced in a stationary ve-
hicle, facilitating their transformation into procedural
memory. For tasks such as S-curve navigation, which
involve vehicle control on narrow roads, procedural
information must be accompanied by speed manage-
ment strategies - specifically intermittent stopping - to
allocate working memory during practice and encour-
age the prediction of vehicle position and orientation.
In summary, this study focused on the informa-
tion processing characteristics of learner drivers and
successfully formalized instructional methods for pre-
learning by evaluating its impact on skill acquisi-
tion. However, this study was limited to pre-learning
and did not address the formalization of instructional
methods for practice and feedback phases. Addition-
ally, the analysis was restricted to lane changes and S-
curve navigation, leaving the generalizability to other
tasks unverified. Future work will focus on formal-
izing instructional methods for practice and feedback
phases and integrating them into a comprehensive in-
structional design, followed by evaluating its effec-
tiveness.
ACKNOWLEDGEMENTS
We would like to express our gratitude to Minami-
Fukuoka Driving School for providing their facilities
as the experimental site for this study.
REFERENCES
Crundall, D., Howard, A., and Young, A. (2017). Perceptual
training to increase drivers’ ability to spot motorcycles
at t-junctions. Transportation Research Part F: Traffic
Psychology and Behaviour, 48:1–12.
Duan, G.-J., Yan, X., and Ma, H. (2019). An intelligent
driver training system based on real cars. Sensors,
19(3).
Fitts, P. M. and Posner, M. I. (1967). Human Performance.
Brooks/Cole, Belmont, CA.
Guadagnoli, M. A., Kohl, R. M., and Lee, T. D. (1992).
The contribution of verbalization to action: A multiple
memory systems analysis. Journal of Motor Behavior,
24(1):86–91.
Handa, K., Muraki, T., Miyazaki, W., Ishihara, K., Egami,
Y., and Matsuki, Y. (2023). Development of remote
driving instruction system based on autonomous driv-
ing technology. Proceedings of the JSAE Annual
Congress (Web), 2023(Autumn):Paper No. 256 (Web
Only).
Land, M. F. and Lee, D. N. (1994). Where we look when
we steer. Nature, 369(6483):742–744.
Moreno, R. and Mayer, R. (2007). Interactive multimodal
learning environments. Educ Psychol Rev, 19:309–
326.
Nakahira, K. T., Fukami, Y., and Akahane, M. (2011). Ver-
ification of the effectiveness of blended learning in
teaching performance skills for simultaneous singing
and piano playing. In Riaz, Z., editor, Biometric Sys-
tems, chapter 11. IntechOpen, Rijeka.
National Police Agency (2022). Standard of
instruction at designated driving dchools.
https://www.npa.go.jp/laws/notification/koutuu/
\allowbreak{}menkyo/menkyo20220307\ 18.pdf.
Accessed: 2024-12-17, In Japanese.
Nuruki, A., Shimozono, T., Kawabata, T., Yamada, M.,
Yunokuchi, K., and Maruyama, A. (2011). A study
on feature of eye tracking in difference of skill level
during observational learning of movement. IEEJ
Transactions on Electronics, Information and Sys-
tems, 131(1):182–189. Accessed: 2024-12-17, In
Japanese.
Sweller, J. (1988). Cognitive load during problem solving:
Effects on learning. Cognitive Science, 12(2):257–
285.
Formalization of Pre-Learning Instructional Method Based on Information Processing of Learner Driver
689
