
Shape from Mirrored Polarimetric Light Field
Shunsuke Nakagawa
1
, Takahiro Okabe
3 a
and Ryo Kawahara
2 b
1
Department of Artificial Intelligence, Kyushu Institute of Technology, 680-4 Kawazu, Iizuka, Fukuoka 820-8502, Japan
2
Graduate School of Informatics, Kyoto University, Yoshida-honmachi, Sakyo-ku, Kyoto, 606-8501, Japan
3
Information Technology Track, Faculty of Engineering, Okayama University, 3-1-1 Tsushima-naka, Kita-ku, Okayama
700-8530, Japan
Keywords:
3D Shape Reconstruction, Polarization, Mirror.
Abstract:
While mirror reflections provide valuable cues for vision tasks, recovering the shape of mirror-like objects re-
mains challenging because they reflect their surroundings rather than displaying their own textures. A common
approach involves placing reference objects and analyzing their reflected correspondences, but this often intro-
duces depth ambiguity and relies on additional assumptions. In this paper, we propose a unified framework that
integrates polarization and geometric transformations for shape estimation. We introduce a 9-dimensional po-
larized ray representation, extending the Pl
¨
ucker coordinate system to incorporate the polarization properties
of light as defined by the plane of its electric field oscillation. This enables the seamless evaluation of polar-
ized ray agreement within a homogeneous coordinate system. By analyzing the constraints of polarized rays
before and after reflection, we derive a method for per-pixel shape estimation. Our experimental evaluations
with synthetic and real images demonstrate the effectiveness of our method qualitatively and quantitatively.
1 INTRODUCTION
Recovering the shape of objects with perfectly mir-
ror surfaces is challenging, as these objects reflect
surrounding scenes rather than showing their inher-
ent textures. The robust solution has a wide range of
applications in product inspection, robotics, and ex-
tended reality (XR). Moreover, by leveraging the rich
visual information reflected on the surface, the rays
observable through a mirror contribute to wide-field-
of-view shape recovery, precise localization, and effi-
cient navigation.
In conventional studies, the shape cue of a
mirrored object is extracted by placing a texture-
referencing object, such as a display, and capturing
its reflection with a camera. However, even if a cor-
respondence is provided between the reference object
and the camera, ambiguity about the object’s shape
remains because its depth is not uniquely determined.
Therefore, assuming the surface integrability or lever-
aging the compound mirror’s flatness is required for
shape recovery (Takahashi et al., 2012).
Polarization provides a clue to resolving this am-
biguity. The polarization before and after specular re-
a
https://orcid.org/0000-0002-2183-7112
b
https://orcid.org/0000-0002-9819-3634
flection varies depending on the surface normal of the
object, allowing the normal to be recovered by utiliz-
ing multiple viewpoints (Miyazaki et al., 2012; Han
et al., 2024) or the unique polarization pattern of the
sky (Ichikawa et al., 2021). Lu et al. (Lu et al., 2019)
proposed an approach to reconstructing complex mir-
ror surfaces utilizing the polarization field generated
by an LCD with one polarizing plate removed. How-
ever, it is necessary to use two or more calibrated po-
larized states of the liquid crystal, and the process ad-
ditionally requires the extra step of attaching and de-
taching the polarizing plates.
In previous methods, the geometry of correspond-
ing points and the constraints imposed by polariza-
tion are often treated independently or as separate
steps. Additionally, in polarization-based methods,
orthographic projection is typically assumed and re-
cently extended to perspective projection models (Pis-
tellato and Bergamasco, 2024). Can a framework be
established that describes the geometric transforma-
tion of both within a unified analysis in 3D space?
If achieved, this could naturally integrate the two
modalities to provide a structured approach to ana-
lyzing solution spaces.
In this paper, we show that the geometrical trans-
formation before and after reflection can be repre-
790
Nakagawa, S., Okabe, T. and Kawahara, R.
Shape from Mirrored Polarimetric Light Field.
DOI: 10.5220/0013389800003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
790-796
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

sented using a 9-dimensional polarized ray. Specifi-
cally, we extend the representation of light rays in the
Pl
¨
ucker coordinate system by geometrically defining
the properties of linearly polarized light as the normal
to the oscillation plane of the electric field. Addition-
ally, we derive constraints for shape estimation from
the polarized rays before and after reflection. We en-
able a straightforward evaluation of the agreement be-
tween polarized rays by utilizing a homogeneous co-
ordinate system, and we formulate shape recovery as
a nonlinear optimization problem.
Our main contributions are as follows:
• Introducing the polarization light field, which ex-
tends the conventional light field by incorporating
the plane of polarization normals and demonstrat-
ing that polarization rays can be handled through
geometric transformations.
• Proposing a method for estimating the normal of a
mirror surface object for each pixel by leveraging
the reflection relationships of polarized rays.
2 RELATED WORK
Numerous studies have obtained the normal and posi-
tion of the mirror surface from the reference point and
its observation. In particular, in studies that focus on
planar mirrors (Sturm and Bonfort, 2006; Rodrigues
et al., 2010; Kumar et al., 2008), it is possible to re-
cover the mirror surface even when the pose of the ref-
erence object is unknown. Takahashi et al. (Takahashi
et al., 2012) leveraged multiple reflections to recover
the normal of a multi-facet mirror from two or more
corresponding points. On the other hand, since the
normal of the curved mirror differs for each pixel, not
only is a dense set of corresponding points required
but also steps, such as moving the reference (Kutu-
lakos and Steger, 2008; Grossberg and Nayar, 2005;
Liu et al., 2011; Han et al., 2021), are required to ob-
tain multiple constraints. Thus making it challenging
to cover a wide range of objects’ surfaces.
Some methods deal with the mirror surfaces by
adding additional constraints, such as the integrability
of the surface or radiometric clues (Liu et al., 2013;
Chari and Sturm, 2013). There are methods that use
LCDs as sources of polarized light (Lu et al., 2019;
Kawahara et al., 2023). These techniques take advan-
tage of polarization constraints through higher-order
nonlinear optimization problems, and the geometric
transformation relationships of polarization still re-
quire further exploration.
Shape from polarization (SfP), which reconstructs
normals based on polarization, has been studied ex-
tensively for dielectric materials. Some SfP methods
use specular reflection of unpolarized light as a clue
for estimating the normal. However, there is ambigu-
ity in the estimation (Atkinson and Hancock, 2006;
Miyazaki et al., 2003), so SfP also leverages addi-
tional clues such as multi-view (Cui et al., 2017; Zhao
et al., 2020) and shading(Smith et al., 2016; Huynh
et al., 2010) and active lighting (Ma et al., 2007;
Ichikawa et al., 2023).
While monocular SfP focuses on recovering sur-
face normals, our approach geometrically unifies and
analyzes both the dense feature point correspon-
dences on the reference object and the polarization
correspondences, enabling simultaneous depth recov-
ery.
3 BASICS: POLARIZATION
Light is an electromagnetic wave that oscillates per-
pendicularly to the direction of propagation. The os-
cillation plane of light, invisible to the human eyes,
has random directions for sunlight or incandescent
lamps. This type of light is called unpolarized light.
In contrast, light from LCDs and other sources that
pass through linear polarizers has only a single oscil-
lation plane, and this type of light is called linearly
polarized light.
If we define a plane perpendicular to the direction
of light propagation, the amplitude of the electric field
of linearly polarized light can be represented as a 2D
Jones vector ˇe as follows;
ˇe =
E
x
E
y
=
E
0
cosα
E
0
sinα
, (1)
where E
x
and E
y
are the x and y components of the
amplitude E
0
in the plane.
We can leverage polarizing filters to obtain the an-
gle α of the light oscillation in Eq. 1. A polarizing
filter extracts the polarization component at a specific
angle. Specifically, we place a polarizing filter in front
of the camera and calculate the polarization angle α
from the intensity captured at multiple known filter
angles ψ. The amplitude transmission of the electric
field ˇe
c
(ψ) for a filter angle ψ can be described using
the Jones calculus as follows (Collett, 2005);
ˇe
c
(ψ) =
cos
2
ψ cosψsinψ
cosψ sinψ sin
2
ψ
ˇe
= E
0
cosψ cos(ψ − α)
sinψ sin(ψ − α)
.
(2)
When the energy of this electric field is observed as
intensity by a camera, the following holds;
I(ψ) ∝ || ˇe
c
(ψ)||
2
2
. (3)
Shape from Mirrored Polarimetric Light Field
791

Image plane
Polarization camera
e
Plane of
polarization
Figure 1: Polarized Ray. The plane of polarization is
spanned by the direction of the electric field and the view-
ing direction.
Therefore, from Eq. 2 and Eq. 3, when the filter angle
of the polarizing camera is ψ, linear polarization with
AoLP α is observed with an intensity of
I(ψ) = I
0
+ I
0
cos(2ψ − 2α). (4)
We can utilize a quad-Bayer polarization camera to
simultaneously obtain polarization images of four fil-
ter angles ψ = (0,π/4,π/2, 3π/4) in a single shot and
recover the sinusoidal in Eq. 4 (Huynh et al., 2010).
4 METHOD
By extending the existing light field representation,
we describe the transformation of both polarization
state and ray geometry and recover the shape of the
mirror object by analyzing it.
4.1 Polarimetric Light Field
The viewing direction vectors for each pixel form a
unique set of rays by mirror reflection. Let us de-
scribe the rays of the light field by extending them
with polarization.
Polarized Ray. As shown in Fig. 1, The direction
vector of the electric field at the image plane can be
described in 3D space, using AoP α obtained from the
observation as follows;
e =
1
q
E
2
x
+ E
2
y
E
x
E
y
0
=
cosα
sinα
0
. (5)
The plane of polarization (PoP) on which the electric
field oscillates is spanned by e and the viewing di-
rection v
c
. Thus, we can represent PoP by its normal
as
h =
v × e
⊤
||v × e
⊤
||
(6)
Let us consider the expansion of the Pl
¨
ucker coor-
dinates system (Sturm and Barreto, 2008) to evaluate
whether rays are equivalent. This 6D homogeneous
coordinate system can express arbitrary rays and con-
sists of two components: the direction of the ray v
and the normal δ of the plane spanned by the origin
and the ray, also called the moment.
v
δ
=
v
o × v
∈ R
6
, (7)
where o denotes the origin of the ray, and v is a unit
vector. We combine this with the PoP in Eq. 5 to de-
fine the polarized ray ℓ ∈ R
9
as follows.
ℓ =
v
o × v
h
. (8)
Note that there is a sign ambiguity in the normal vec-
tor that defines PoP.
Geometric Transformation. The coordinate trans-
formation is linear w.r.t. the direction of the ray ℓ,
the origin o, and the PoP direction h. Thus, the mir-
ror transformation can be described using the House-
holder matrix H and the translation vector t
m
as fol-
lows;
v
′
= Hv,
o
′
= Ho + t
m
h
′
= Hh,
(9)
where the H and t
m
are defined by the mirror normal
n and the distance to the mirror plane d
m
as
H = I − 2nn
⊤
, t
m
= −2d
m
n. (10)
From Eq. 9, the mirror transformation of a polarized
ray ℓ can be described using a matrix M ∈ R
9×9
, as
follows;
ℓ
′
= Mℓ
=
H 0 0
t
m
× H H 0
0 0 H
ℓ.
(11)
Up to this point, we can geometrically transform the
polarized rays that consist of the polarized light field.
4.2 Shape from Mirrored Polarimetric
Light Field
As shown in Fig. 2, suppose that the point p
d
on the
LCD is reflected on the object surface and observed in
the polarization camera’s viewing direction v
c
. The
goal is to obtain the object surface’s normal n and
depth z. We first introduce the constraints for this
imaging system when all the other unknowns are ob-
tained.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
792

e
e
dm
Mirror
LCD
Polarization
camera
Figure 2: Shape from Mirrored Polarimetric Light Field.
Constraints. In summary, the constraint is that the
mirror transformation of the polarized light observed
by the camera matches the known polarized light de-
fined on the display side. When the direction of the
electric field e
c
is obtained in the viewing v
c
of the
polarization camera, the PoP normal h
c
is described
as
h
c
=
v
c
× e
⊤
c
||v
c
× e
⊤
c
||
. (12)
Thus, the polarized ray ℓ
c
obtained on the polarization
camera side is described as
ℓ
c
=
v
c
o × v
c
h
c
, (13)
where o is the camera’s origin. Also, the polarized
ray ℓ
c
is reflected at the object surface to become ℓ
′
c
as
ℓ
′
c
= Mℓ
c
=
Hv
c
t
m
× Hv
c
Hh
c
, (14)
On the other hand, polarized light can also be de-
scribed on the display side. When the corresponding
point on the LCD is p
d
and its electric field direction
is e
d
in the camera coordinate system, the PoP normal
h
d
is described as
h
d
=
Hv
c
× e
⊤
d
||Hv
c
× e
⊤
d
||
. (15)
Therefore, the polarized ray ℓ
d
of the LCD side be-
comes
ℓ
d
=
Hv
c
p
d
× Hv
c
h
d
. (16)
Since these polarized rays are represented in ho-
mogeneous coordinates, ℓ
′
c
and ℓ
d
become identical.
Noting the ambiguity of the sign of the PoP normal,
we can obtain the constraints as
t
m
× Hv
c
− p
d
× Hv
c
= 0,
Hh
c
× h
d
= 0.
(17)
The degree of freedom (DOF) of the normal n is 2,
and the DOF of mirror plane distance d
m
is 1, but
Eq. 17 is nonlinear. Therefore, for robust estimation,
we introduce regularization that assumes the integra-
bility of the surface.
E
n
= ||1 − n
⊤
n
+
||
2
2
, (18)
where n
+
is the surface normal calculated using the
neighboring depth as
n
+
=
(−∂
x
z,−∂
y
z,1)
⊤
||(−∂
x
z,−∂
y
z,1)
⊤
||
(19)
Note that the depth z can be obtained by the mirror
plane distance d
m
and z-component of the viewing z
v
c
as z = d
m
z
v
c
. We define the following error function
from Eq. 17 to optimize together with Eq. 18,
E
δ
= ||(t
m
− p
d
) × Hv
c
||
2
2
,
E
h
= ||Hh
c
× h
d
||
2
2
.
(20)
Finally, we consider the following minimization prob-
lem.
min
n,d
m
(E
δ
+ λ
h
E
h
+ λ
n
E
n
), (21)
where λ
h
, λ
n
are the optimization weight.
Shape Estimation. To obtain the direction of the
electric field e
c
from the polarization camera obser-
vations, we calculate the value of α in Eq. 4 for each
pixel in the captured image, and then apply to Eq. 5.
The direction of the electric field of the LCD is known
as a product-specific angle in the image coordinate
system of the LCD (typically, it is either horizontal,
vertical, or π/4). Denoting the vector formed by ap-
plying this to Eq. 5 as ˆe
d
, then e
d
in the camera coor-
dinate system is calculated with the calibrated display
rotation R
d
as
e
d
= R
d
ˆe
d
. (22)
Regarding the point p
d
on the LCD corresponding
to the camera’s line of sight v
c
, we leverage existing
structured lighting to obtain the correspondence. De-
noting the corresponding point in the LCD’s local co-
ordinate system as ˆp
d
, the transformation to the cam-
era coordinate system is described as
p
d
= R
d
ˆp
d
+ t
d
, (23)
where t
d
is the translation vector of the display w.r.t.
the camera. Up to this point, we have obtained the
input for Eq. 21 to recover the shape through the opti-
mization.
Shape from Mirrored Polarimetric Light Field
793
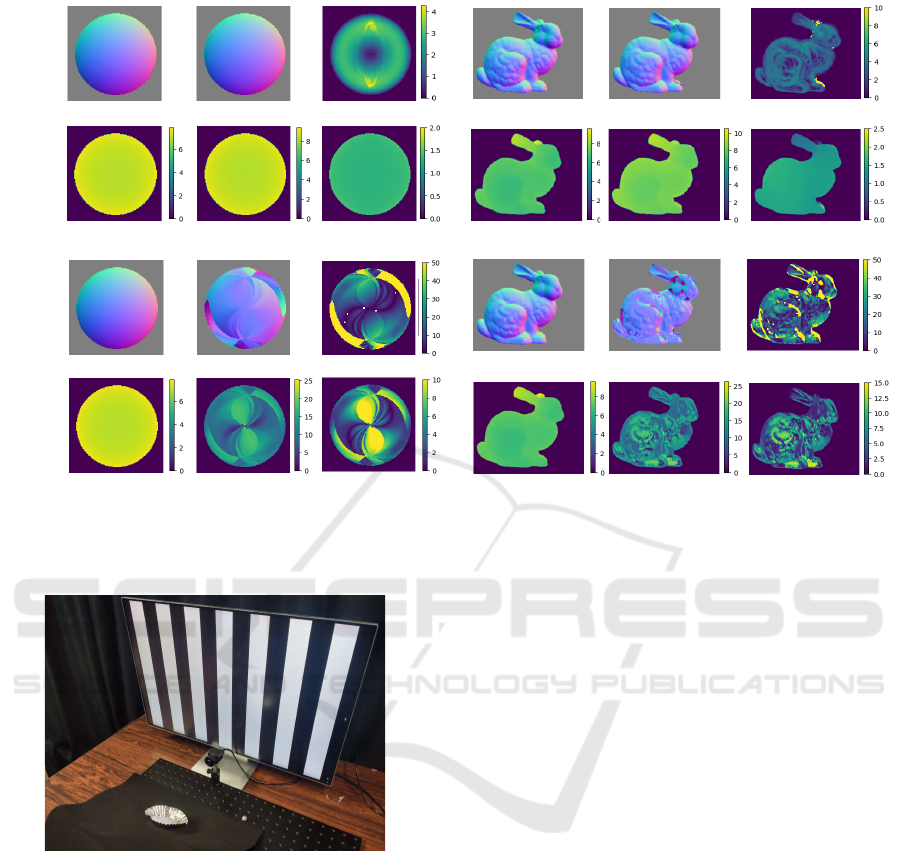
(a) (b)
GT GTEstimated Error ErrorEstimated
W/o
polarization
Ours
Figure 3: The shape reconstruction results with synthetic (a) Sphere and (b) Bunny data. The upper row of each method shows
the results of normal estimation, and the lower row shows the depth estimation results. The error maps of the normal are
calculated as an angular error in degree, and the error maps of the depth are in cm.
LCD
Object
Polarization
camera
Figure 4: Experimental Setup.
5 RESULTS
In this section, we evaluate our method’s prototyping
and demonstrate its effectiveness through quantitative
evaluation using synthetic data and reconstruction re-
sults using real images.
5.1 Quantitative Evaluation with
Synthetic Data
We quantitatively evaluate the accuracy of our re-
construction using synthetic data. We rendered the
simple-shaped Sphere and the complex-shaped Bunny
as target objects under a linear polarized light source.
Considering the actual environment, we set the dis-
tance from the camera to the object to be about 0.8
m and the size of the subject to be about 0.10 m. As
a baseline method, we compare to the approach that
does not utilize polarization (i.e. w/o E
h
).
Here, the initial value of the normal vector is set to
face the front, and the depth is set to 0.8 m as a plane.
We used Pytorch’s Adam optimizer for optimization
and set λ
h
= 1.0 and λ
n
= 100 for Eq. 21. The num-
ber of iterations for parameter updates was set to 700.
Regarding comparison methods, many SfP methods
assume an unpolarized light source and dielectric ma-
terial, which makes direct comparison difficult.
Fig. 3 shows the experimental results of the syn-
thetic data. Although the shape obtained by our
method was qualitatively accurate compared to the
baseline method, an error can still be observed even
in the experiment without the intensity noise. These
results suggest that a local minimum exists in the op-
timization of Eq. 21. Specifically, the symmetric error
structure shown in Fig. 3(a) suggests a local minimum
that depends on the polarization direction of the dis-
play. This occurs when the optimization starts from
the initial value of the normal vector that we set uni-
formly oriented forward.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
794
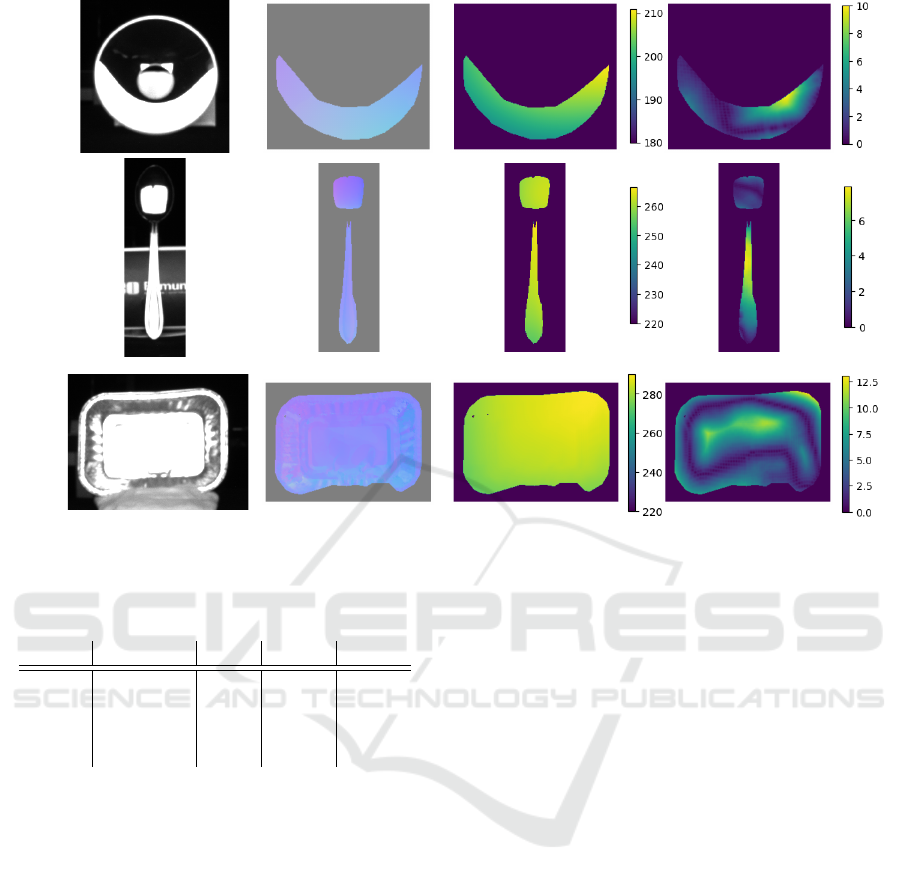
Input Normal Depth Depth error
(a)
(b)
(c)
Figure 5: The shape reconstruction results of real-world objects. (a) Elipse Mirror, (b) Spoon, (c) Aluminum cup. The error
of the depth map is in mm.
Table 1: Results of refractive index estimation.
Input Error Ours w/o E
n
w/o E
h
Sphere
Normal (
◦
) 0.74 0.87 8.15
Depth (m) 0.042 0.047 0.167
Bunny
Normal (
◦
) 2.62 2.99 13.31
Depth (m) 0.106 0.124 0.316
5.2 Ablation Study
For further evaluation of the optimization, we verify
the effect of the regularization term E
n
through abla-
tion experiments.
Table 1 shows the difference in results with and
without the regularization term E
n
and the PoP error
cost E
h
. These results show that the consistency of
depth and normals work as effective guidance even
for general shapes such as Bunny and that both nor-
mals and depth results are improved.
5.3 Real World Objects
As shown in Fig. 4, our system consist of a single
LCD (HUAWEI MateView 3840×2560px) and a sin-
gle polarization camera (FLIR BFS-U3-51S5P). The
relative pose of the LCD and the polarization camera
is calibrated beforehand using a planner mirror. We
used the same strategy as in the simulation experiment
in Sec. 5.1 for the initial normal and depth values. The
ground truth depth value in the evaluation is obtained
by aligning the depth camera (Intel RealSense D405)
values.
Fig. 5 shows that our method can successfully re-
cover the surface normals and depth of mirror objects
in the real world. These results qualitatively demon-
strate that both global and local shapes can be re-
covered. The average depth error are 2.84mm for
Elipse Mirror, 3.21mm for Spoon, and 4.25mm for
Aluminum cup, respectively. Note that the results only
show the areas that can be recovered, and this area
depends on the direction of the light source that the
display can illuminate.
6 CONCLUSION
In this paper, we introduce a novel method for recon-
structing the per-pixel surface normals and depths of
mirror objects. By analyzing the polarization light
field formed by polarized rays described in a homo-
geneous coordinate system, we clarify the geomet-
ric constraints imposed by both. Our approach uni-
fies polarization and geometry under a single analy-
sis, providing a structured and efficient method for
reconstructing the shape of mirror surfaces. Exper-
Shape from Mirrored Polarimetric Light Field
795

imental results show that our method can accurately
reconstruct the per-pixel depths and surface normals
of various mirror surfaces. Our future work includes
extending the system to a polarized light source com-
bining a mirror and LCD and calibrating a catadiop-
tric system that handles polarization.
Limitations. The primary limitation of our method
is that the reconstructible area of the object is lim-
ited by the spatial range of the display’s illumination.
This issue could be mitigated by using multiple LCDs
or incorporating curved displays. Additionally, the
method assumes a metallic surface, which may re-
strict its applicability. This limitation could be ad-
dressed by extending the approach to handle dielectric
materials using Fresnel reflection.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Numbers JP20H00612 and JP22K17914.
REFERENCES
Atkinson, G. A. and Hancock, E. R. (2006). Recovery of
surface orientation from diffuse polarization. IEEE
TIP, 15(6):1653–1664.
Chari, V. and Sturm, P. (2013). A theory of refractive photo-
light-path triangulation. In CVPR, pages 1438–1445.
Collett, E. (2005). Field guide to polarization. Spie Belling-
ham.
Cui, Z., Gu, J., Shi, B., Tan, P., and Kautz, J. (2017). Polari-
metric multi-view stereo. In CVPR, pages 1558–1567.
Grossberg, M. D. and Nayar, S. K. (2005). The raxel imag-
ing model and ray-based calibration. IJCV, 61:119–
137.
Han, K., Liu, M., Schnieders, D., and Wong, K.-Y. K.
(2021). Fixed viewpoint mirror surface reconstruction
under an uncalibrated camera. IEEE TIP.
Han, Y., Guo, H., Fukai, K., Santo, H., Shi, B., Okura, F.,
Ma, Z., and Jia, Y. (2024). Nersp: Neural 3d recon-
struction for reflective objects with sparse polarized
images. In CVPR, pages 11821–11830.
Huynh, C. P., Robles-Kelly, A., and Hancock, E. (2010).
Shape and refractive index recovery from single-view
polarisation images. In CVPR, pages 1229–1236.
Ichikawa, T., Nobuhara, S., and Nishino, K. (2023). Spi-
ders: Structured polarization for invisible depth and
reflectance sensing. ArXiv, abs/2312.04553.
Ichikawa, T., Purri, M., Kawahara, R., Nobuhara, S., Dana,
K., and Nishino, K. (2021). Shape from sky: Polari-
metric normal recovery under the sky. In CVPR, pages
14832–14841.
Kawahara, R., Kuo, M.-Y. J., and Okabe, T. (2023). Po-
larimetric underwater stereo. In Scandinavian Con-
ference on Image Analysis, pages 534–550. Springer.
Kumar, R. K., Ilie, A., Frahm, J.-M., and Pollefeys, M.
(2008). Simple calibration of non-overlapping cam-
eras with a mirror. In CVPR, pages 1–7. IEEE.
Kutulakos, K. N. and Steger, E. (2008). A theory of refrac-
tive and specular 3d shape by light-path triangulation.
IJCV, 76:13–29.
Liu, M., Hartley, R., and Salzmann, M. (2013). Mirror sur-
face reconstruction from a single image. In CVPR.
Liu, M., Wong, K.-Y. K., Dai, Z., and Chen, Z. (2011).
Specular surface recovery from reflections of a pla-
nar pattern undergoing an unknown pure translation.
In ACCV, pages 137–147. Springer.
Lu, J., Ji, Y., Yu, J., and Ye, J. (2019). Mirror surface re-
construction using polarization field. In ICCP, pages
1–9.
Ma, W.-C., Hawkins, T., Peers, P., Chabert, C.-F., Weiss,
M., Debevec, P. E., et al. (2007). Rapid acquisi-
tion of specular and diffuse normal maps from polar-
ized spherical gradient illumination. Rendering Tech-
niques, 9(10):2.
Miyazaki, D., Shigetomi, T., Baba, M., Furukawa, R.,
Hiura, S., and Asada, N. (2012). Polarization-based
surface normal estimation of black specular objects
from multiple viewpoints. In 2012 Second Interna-
tional Conference on 3D Imaging, Modeling, Process-
ing, Visualization and Transmission, pages 104–111.
Miyazaki, D., Tan, R. T., Hara, K., and Ikeuchi, K. (2003).
Polarization-based inverse rendering from a single
view. In ICCV, pages 982–982.
Pistellato, M. and Bergamasco, F. (2024). The raxel
imaging model and ray-based calibration. IJCV,
132:4688—-4702.
Rodrigues, R., Barreto, J. P., and Nunes, U. (2010). Camera
pose estimation using images of planar mirror reflec-
tions. In Daniilidis, K., Maragos, P., and Paragios, N.,
editors, ECCV, pages 382–395, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Smith, W. A., Ramamoorthi, R., and Tozza, S. (2016). Lin-
ear depth estimation from an uncalibrated, monoc-
ular polarisation image. In ECCV, pages 109–125.
Springer.
Sturm, P. and Barreto, J. P. (2008). General imaging geom-
etry for central catadioptric cameras. In ECCV, pages
609–622. Springer.
Sturm, P. and Bonfort, T. (2006). How to compute the
pose of an object without a direct view? In ACCV,
ACCV’06, page 21–31, Berlin, Heidelberg. Springer-
Verlag.
Takahashi, K., Nobuhara, S., and Matsuyama, T. (2012). A
new mirror-based extrinsic camera calibration using
an orthogonality constraint. In 2012 IEEE Conference
on Computer Vision and Pattern Recognition, pages
1051–1058. IEEE.
Zhao, J., Monno, Y., and Okutomi, M. (2020). Polarimetric
multi-view inverse rendering. In ECCV, pages 85–
102. Springer.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
796
