
Gesture Recognition Through the Implementation of a Bimodal
Acquisition System Using EMG and FMG Signals
Nuno Pires
1
and Milton P. Macedo
1,2 a
1
Instituto Politécnico de Coimbra, Rua da Misericórdia,
Lagar dos Cortiços, S. Martinho do Bispo, 3045-093 Coimbra, Portugal
2
LIBPhys, Department of Physics, University of Coimbra, Rua Larga, 3004-516 Coimbra, Portugal
Keywords: Bionic Hand, Electromyography, Force Myography, Feature Extraction, Gesture Recognition, Classification
Models.
Abstract: This study is part of a broader project, the Open Source Bionic Hand, which aims to develop and control, in
real time, a low-cost 3D-printed bionic hand prototype using signals from the muscles of the forearm. In this
work, it is intended to implement a bimodal signal acquisition system, which uses EMG signals and Force
Myography (FMG), in order to optimize the recognition of gesture intention and, consequently, the control of
the bionic hand. The implementation of this bimodal EMG/FMG system will be described. It uses two
different signals from BITalino EMG modules and Flexiforce™ sensors from Tekscan™. The dataset was
built from thirty-six features extracted from each acquisition using two of each EMG and FMG sensors in
extensor and flexor muscle groups simultaneously. The extraction of features is also depicted as well as the
subsequent use of these features to train and compare Machine Learning models in gesture recognition,
through MATLAB's Classification Learner tool. Preliminary results obtained from a dataset of three healthy
volunteers, show the effectiveness of this bimodal EMG/FMG system in the improvement of the efficacy on
gesture recognition as it is shown for example for the Quadratic SVM classifier that raises from 75,00% with
EMG signals to 87,96% using both signals.
1 INTRODUCTION
Upper limb myoelectric prostheses, also called bionic
hands, are electromechanical devices that are attached
to the residual limb of amputees, in order to replicate
the functionality of the human hand, and
consequently improve the quality of life of these
people.
Commercial bionic hand models use surface
electromyographic (EMG) sensors to capture the
electrical activity produced when muscle remnants
are activated. However, this is a detection method
whose effectiveness is susceptible to external
electromagnetic noise, muscle fatigue, or impedance
changes in the sensor-skin interface. So research in
the field of myoelectric prostheses is faced with the
constant challenge of replicating the functionality of
the human hand.
This study is part of a broader project, the Open
Source Bionic Hand, which aims to develop and
a
https://orcid.org/0000-0003-0595-5298
control, in real time, a low-cost 3D-printed bionic
hand prototype using signals from the muscles of the
forearm. In literature it is possible to find previous
contributions from this project, focused on the
implementation of a prototype of a low-cost
controller of a bionic hand, namely from the
application of alternative mechanomyographic
sensors and novel and low-cost electrodes, built from
a conductive leather material as well as based on
desktop 3D printing using conductive PLA (Pol-
yLactic Acid) (Marques, 2020) (Silva, 2019).
The main objective of the work presented in this
paper it is the implementation and evaluation of the
effectiveness of a bimodal EMG/FMG signal
acquisition system for the control of a bionic hand.
The idea is to counter the limitations of EMG sensors
by integrating FMG, which shows benefits such as
robustness in the face of impedance changes at the
1018
Pires, N. and Macedo, M. P.
Gesture Recognition Through the Implementation of a Bimodal Acquisition System Using EMG and FMG Signals.
DOI: 10.5220/0013401800003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 2: HEALTHINF, pages 1018-1026
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

skin interface and sweating, and lower sensitivity to
sensor positioning. This is despite having its own
challenges, such as sensitivity to unintentional move-
ments and external noises.
The term FMG, or force myography, describes the
various non-invasive techniques that use force
sensors to detect voluntary changes associated with
the activation/deactivation of superficial muscle
groups relative to a default state that usually
corresponds to the limb in a relaxed position
(Grushko, 2020). It also detects voluntary changes
caused by the movement of tendons under the surface
of the skin (e.g. in the wrist) (McIntosh, 2016).
The first work on the FMG technique as a
modality for the control of myoelectric prostheses
was published in 1999 (Abboudi, 1999) but it was
only in the middle of the last decade that it gained
traction among researchers, driven by the
development of Machine Learning techniques.
Several scientific publications present promising
results on the possibility of using the FMG technique
to predict movement intention in implementations of
bionic hand prostheses (Citi, 2016) (Kadkhodayan,
2016) (Radmand, 2016). More recently, there is a
growing interest in combining sEMG and FMG in
order to create more robust control systems to be used
by pattern recognition models (Jaquier, 2017)
(Nowak, 2017) (Xiao,2017). What makes the bimodal
system interesting is the fact that it detects both
electrical and volumetric phenomena associated with
muscle contraction. In 2020, Jiang et al., proposed a
co-localized approach to acquire EMG and FMG sim-
ultaneously at the same location, achieving a 10%
increase in accuracy in identifying 10 American sign
language signals, relative to isolated modalities
(Jiang, 2020).
In general, robustness and/or accuracy increase
when using multimodal acquisition systems.
However, it also increases the information processing
required, and the complexity of integrating all sensors
into the same hybrid acquisition system.
It is also expected that in unimodal FMG systems,
the number of sensors will strongly influence
accuracy as they enable higher spatial resolution and
the extraction of a greater number of features
(Grushko, 2020). However, there are still several
shortcomings that need to be addressed in order to be
able to use FMG technology in commercial bionic
prostheses (Xiao,2017) (Jiang, 2020) (Xiao, 2019).
In this paper, we will describe the implementation
of a bimodal EMG/FMG system using the
physiological signal acquisition platform, BITalino
(Plux Biosignals), to make the acquisition of these
two different signals from BITalino EMG modules
and Flexiforce™ sensors from Tekscan™. The
simultaneous acquisition of EMG and FMG data was
then performed, using BITalino and OpenSignals, as
well as the optimization of the MATLAB routines for
signal processing and onset/offset detection of the ac-
quired signals, implemented in previous works within
the scope of this same project (Rodrigues, 2022)
(Rodrigues, 2023). These steps are crucial for the
extraction of features, and subsequent use of these
features to train and compare Machine Learning
models in gesture recognition, through MATLAB's
Classification Learner tool. So our main
differentiating mark is the choice of low-cost
hardware, in order to obtain a similar or even greater
efficacy with a smaller number of sensors than that
described in the literature, based on an in-depth study
that allows the selection of a smaller set of the best
characteristics and supported by an optimized
classification method. Preliminary results point to
significant gains in the effectiveness of the
classification of gestures, in line with the conclusions
of other studies (Esposito, 2018) (Rafiee, 2011).
These results, although still very preliminary, are also
better than those reported in the literature for
commercial systems with EMG sensors, with an
accuracy of 87.96% vs 84.60% for these systems
(Jiang, 2017).
2 MATERIALS AND METHODS
This work involved the selection of EMG and FMG
sensors as well as the platform for robust data
acquisition. Subsequently, it was necessary to
implement the filters for signal processing, namely
the EMG signal, as well as for the detection of
onset/offset. Finally, the features of the EMG and
FMG signals to be extracted were selected and the
entire methodology for the application of the
classifiers was developed. The main objective is to
analyze the improvement in efficacy achieved with
this bimodal system but also to optimize the
application of these classifiers.
2.1 EMG and FMG Signals
The EMG signal is a widely used tool in the detection
of motion intent in commercial bionic prosthetic
applications. However, the search for additional
information on muscle activity has motivated the
exploration of complementary techniques, such as
force myography (FMG).
The EMG signal is the electrical expression of
muscle activity, in this case captured by surface
Gesture Recognition Through the Implementation of a Bimodal Acquisition System Using EMG and FMG Signals
1019
electrodes placed on the skin on the study muscle.
The amplitude of the EMG signal, which is stochastic
(random) in nature, is influenced by the strength of
muscle contraction and usually ranges from 0 to 10
mV peak-to-peak, or from 0 to 1.5 mV RMS. The
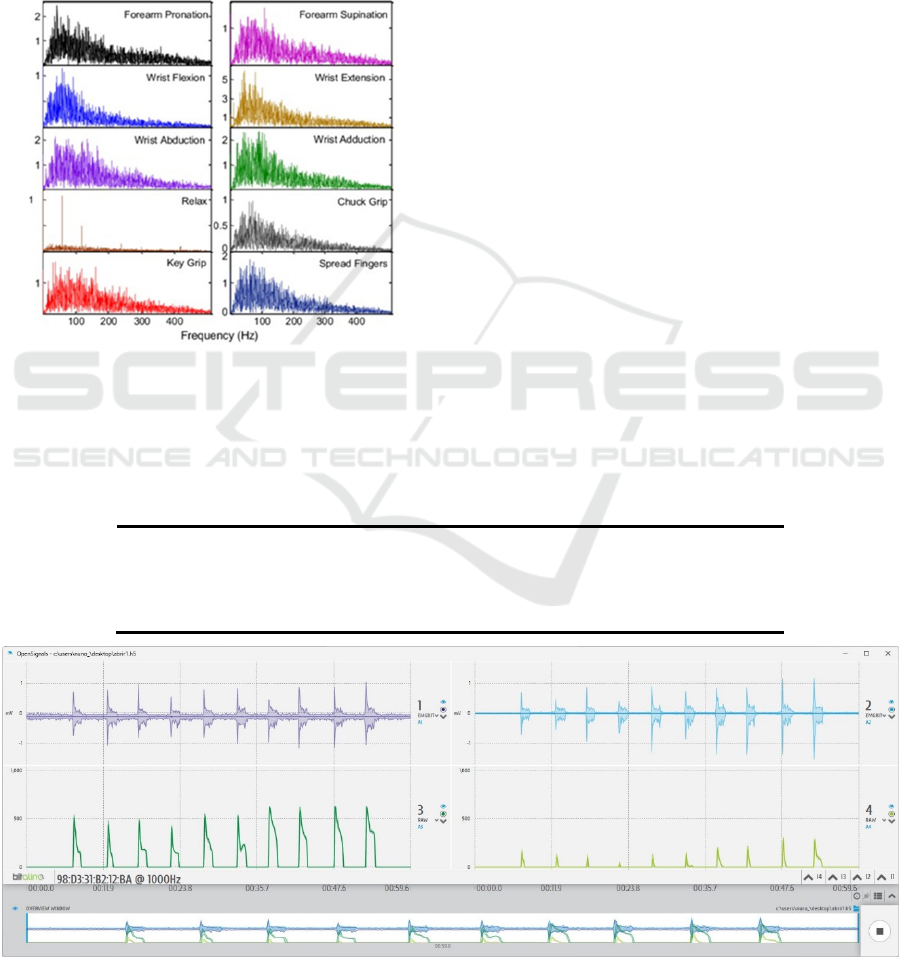
EMG signal is particularly useful in the 0-500 Hz
frequency range, with the dominant energy in the 50-
150 Hz range. This signal characteristic is illustrated
in Figure 1, which shows power density spectra of
EMG signals from different hand gestures.
Figure 1: Power density spectra of EMG signals in hand
gestures (from (Xiao, 2019)).
FMG is a non-invasive technique that makes use
of pressure sensors placed on the skin above the
muscles to capture changes in pressure and volume
associated with the activation and deactivation of
superficial muscle groups. Instead of measuring
muscle electrical activity like EMG, FMG records
mechanical changes, thus capturing distinct
information, which can be valuable in the context of
bionic prostheses.
Although FMG has benefits such as robustness to
changes in skin impedance and sweating, and less
sensitivity to sensor positioning, it faces challenges
such as sensitivity to unintentional movements and
external interference. These limitations could be
addressed through the project of a novel 3D printed
adapter that achieves a more solid fixation of the
sensor as well as the study of filtering techniques that
would be able to cancel the noise induced by these
sources.
For the acquisition of physiological signals, we
used BITalino (r)evolution. This platform is
distinguished by its ability to integrate a wide diversity
of sensors as electromyography (EMG),
electrocardiography (ECG), accelerometer (ACC) and
many others.
In the context of this work, the BITalino board was
used to collect EMG and FMG signals. The EMG
signals were obtained using two BITalino's own EMG
sensors. On the other hand, the capture of FMG signals
required the use of two external FSR 402 sensors,
which, after a signal conditioning circuit, were
integrated into BITalino. Table 1 summarizes the main
technical specifications of BITalino (r)evolution.
Table 1: BITalino (r)evolution: technical specifications.
Sampling Rate 1, 10, 100 ou 1000 Hz
Analog Inputs
4 in (A1-A4, 10-bit) + 2 in (A5-A6, 6-bit) + 1 out (8-bit)
Digital Inputs
2 in (1-bit) + 2 out (1-bit)
Connectivity Bluetooth Class II v2.0 (range till 10 m)
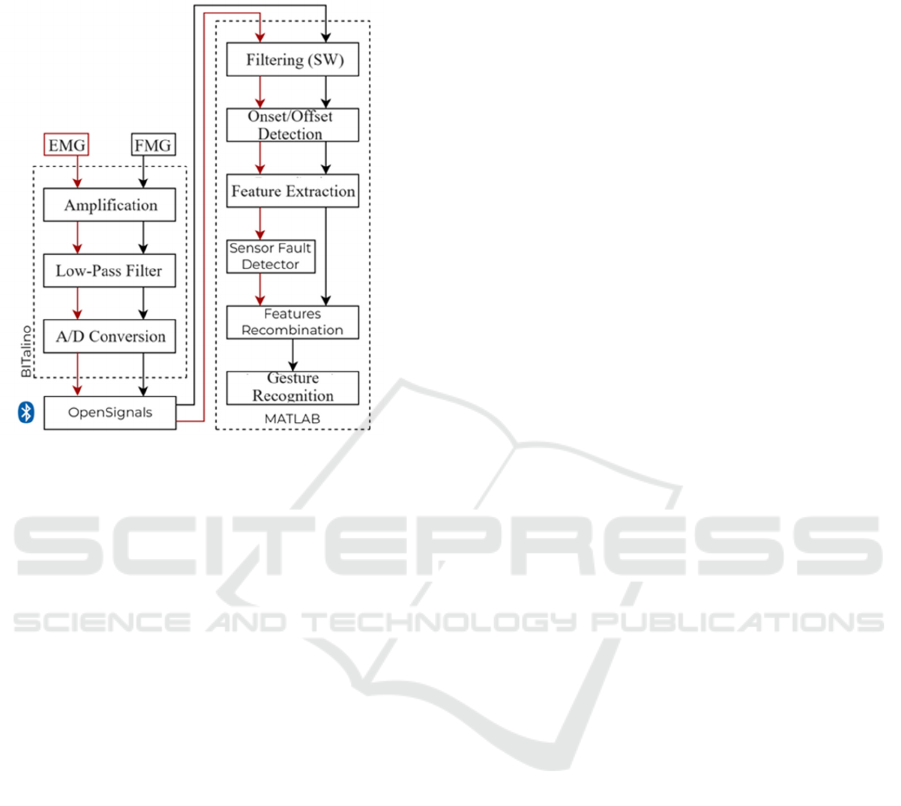
Figure 2: Previously stored data file in Opensignals, showing EMG (top) and FMG (bottom) signals for the "hand opening"
gesture.
WHC 2025 - Special Session on Wearable HealthCare
1020

Table 2: Technical specifications of the EMG sensor.
Gain 1009
Ran
g
e ±1.64 mV
(
com VCC = 3.3 V
)
Bandwidth 25-480 Hz
Power Volta
g
e 2.0-3.5 V
In
p
ut Im
p
edance 7.5 GΩ
CMRR 86 dB
As previously mentioned, the monitoring of the
electrical activity of the flexor and extensor muscle
groups of the forearm was done using two BITalino
EMG sensors, specially designed for sEMG
acquisitions. It is compatible with gel and dry
electrodes, and offers high-quality data with low
noise due to its bipolar configuration. The EMG
sensor is responsible for analog filtering,
amplification, and A/D conversion of the signal.
Table 2 presents the technical specifications of
BITalino's EMG sensor.
Within the scope of this project, sensors of the
FSR 402 model were selected. Two of these sensors
were applied, one for each muscle group under study:
the flexor and extensor forearm. The choice of FSR
sensors is justified by their ability to detect variations
in force from an initial/resting state, rather than
providing an accurate measurement of the applied
force. This property is essential for FMG systems in
gesture recognition, where the goal is not necessarily
to quantify the exact force being applied, but to
identify if there is any force being applied and how
that force changes over time. The FSR 402, in
particular, was chosen for its active area (14.7 mm
diameter) and minimum actuation force (0.1 N),
which were considered suitable for the application in
question.
2.2 Data Acquisition
EMG and FMG signals were collected
simultaneously from each participant, using the
BITalino platform with four acquisition channels:
two for EMG and two for FMG. Data acquisition
from these four channels is commanded by the
microcontroller unit of BITalino according to the
previously defined acquisition rate. One pair of
EMG/FMG sensors was placed in the extensor
muscle group of the forearm and the other in the
flexor muscle group.
BITalino transmits the data via Bluetooth to a PC,
where the data that is being acquired it is visualized
in real-time and stored for further processing using
OpenSignals software. Participants were instructed to
perform five gestures: open, close, pinch, point, and
thumb-up. Each collected data file contains
approximately ten activations of each gesture.
The implementation of signal acquisition went
through the following steps:
1. For each acquisition session, EMG sensors
(in bipolar configuration) were positioned in the
flexor and extensor muscle groups, with a separation
of approximately 2 cm;
2. Between the two active electrodes, an FSR
sensor (on a rigid PVC base) was fixed with an
adhesive;
3. A velcro tape was applied to the forearm
over the two FMG sensors simultaneously to stabilize
the sensors in place;
4. Each participant was instructed to perform
a series of activations of a specific type of gesture,
with durations and rest intervals between activations
ranging from 1 to 3 seconds, to ensure the
representativeness of the data collected. During data
collection, the participant was asked to remain as
relaxed as possible between activations and to keep
the elbow joint still, to minimize the influence of
residual muscle strains on the collected data;
5. Each series of activations was recorded in a
separate file with the name of the gesture performed,
using the OpenSignals software. The sampling rate
was 1000 Hz. Figure 3 shows images of signal
acquisition.
Figure 3: Acquisition of EMG and FMG signals: a) On the
clasp of the hand; b) Opening the hand.
2.3 Data Processing
As illustrated in Figure 4, the EMG and FMG signals
are then initially acquired by BITalino, where they
undergo basic preprocessing, which includes
Gesture Recognition Through the Implementation of a Bimodal Acquisition System Using EMG and FMG Signals
1021
amplification and analog filtering as it is the case of a
low-pass filter to cancel high-frequency noise
(>500 Hz).
Figure 4: Steps of EMG and FMG signal processing.
After preprocessing, the data enters the phase of
extracting the characteristics of the most relevant
signals for the discrimination of gestures. Previously,
it is necessary to detect signal onsets and offsets in
order to identify the periods of muscle activation.
The signals are then forwarded for offline
processing in MATLAB. Here, additional denoising
and bandpass filtering operations are performed to
maintain only the relevant frequencies. The signal
offset is also removed.
Using the MATLAB software, the signals are
processed and their features are extracted, through a
set of previously developed routines [1,14]. This set
comprises a main routine, with the pipeline, along
with auxiliary functions for onset/offset detection and
feature extraction from EMG and FMG signals.
The main routine, implemented in MATLAB,
performs a series of critical steps in signal processing:
1. EMG signal filtering: For each text file
(with EMG and FMG data), the code applies a
bandpass filter from 20 to 500 Hz to the EMG signals;
2. Wavelet Denoising: EMG signals go
through a second stage of noise reduction, this time
using the wdenoise function of MATLAB's Wavelet
Toolbox. This technique, which acts in the time-
frequency domain, eliminates random noises that
could be mistaken for true muscle activity;
3. Onset and offset detection of muscle
activity: this is a crucial step. The code uses the
onsetting function to determine when the muscle
actually started to contract (onset) and when it
stopped (offset). The result is time series (vectors) of
onsets and offsets of muscle contraction. The
onset/offset function is responsible for identifying the
moments when the EMG signal demonstrates
significant activity. The function does this by full-
wave rectification of the signal, applying a moving
average to calcu-late the test function, and setting a
threshold for onset detection. If the signal falls be-low
this threshold, an offset is detected. In addition, the
function also ensures that the detected activity
moments have a minimum duration to avoid false
detections (650 ms);
4. Corresponding activations: the code looks
for muscle activations that coin-cide between the
EMG signals of the two muscle windows (extensor
and flexor). The onset and offset times of the FMG
signals are given by the values saved for the
corresponding EMG signals. The tolerance for
coincidence is given by the value of the constant
tolerance_window, and has been maintained at 500
ms. Figure 5 shows an example of the signals
acquired with the detection of the onsets and offsets
of each muscle activation.;
5. Feature extraction: For each muscle
activation that matches, the code extracts a set of
features from both the EMG and FMG signals.
Features are measures that provide a deeper
understanding of the signals, which would otherwise
be very difficult to interpret.
The extract_emg_features and extract_fmg_features
functions were used to extract characteristics from the
EMG and FMG signals, respectively. These functions
compute a set of characteristics, both in the time and
frequency domains (in the case of EMG), for each
instance of a gesture. In total, thirty-six characteristics
were extracted, twelve EMG and six FMG for each
muscle group.
Finally, each feature vector is labeled with the
corresponding gesture (which appears in the data file
name) and the data is prepared for classification. This
data is then used to train a classification model, which
identifies gestures based on the characteristics
extracted from the signals (Pires, 2023).
3 RESULTS
The preliminary results of this study show significant
improvement of efficacy on gesture recognition using
a bimodal EMG/FMG acquisition system. This is
accomplished from a detailed study of the application
of different machine learning models.
WHC 2025 - Special Session on Wearable HealthCare
1022
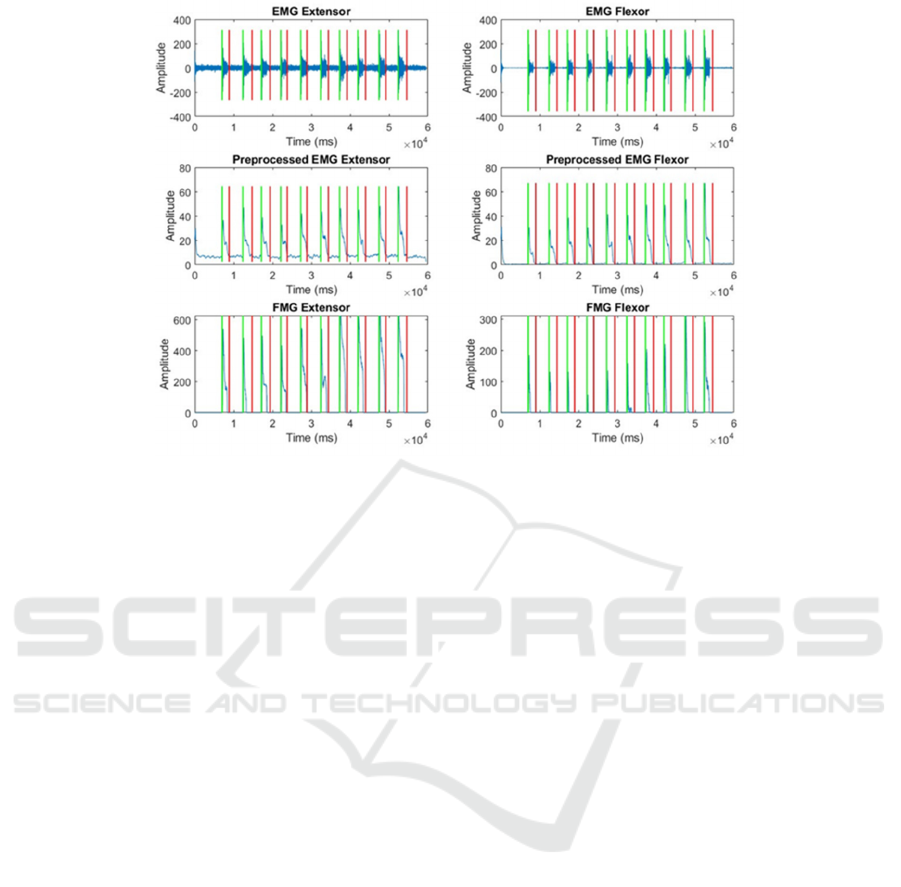
Figure 5: Example of FMG raw-signals and EMG raw and pre-processed signals. Green and red vertical lines shown are,
respectively, the onset and offset time for each muscle activation.
3.1 Dataset
In this study, three healthy individuals participated,
and the dataset was formed from the thirty-six
characteristics of the EMG and FMG signals
extracted from each activation, in each of the files
corresponding to each of the five gestures.
In total, seventy data files suitable for the following
stages of the study were recorded, distributed as
follows: hand opening (14), hand closing (16), pinch
(11), thumbs-up (16) and pointing (15). These files
were selected after discarding others due to
acquisition problems, such as excessive noise, and
incorrect positioning and/or improper fixation of the
sensors.
Figure 6.(a) shows the dataset for each gesture, while
Figure 6.(b) shows how the total of thirty-six features
extracted from each activation are distributed. In fact
the amount of signal characteristics extracted from
extensor and flexor muscles is equal.
However, of these eighteen characteristics, only six
are extracted from the FMG signal. Of these six
characteristics, only two are different from those
extracted from the EMG signal. In Figure 6.(c) all the
characteristics are presented, showing whether they
are common to both signals or from only one of the
signals, through the use of different colors.
It is also possible to observe that there are only three
characteristics (Mean Frequency, Peak Frequency
and Mean Power Spectral Frequency), and only from
EMG signal, that are frequency domain being all the
rest time domain, which are usually preferred in
sEMG based pattern recognition as they are easy and
quick to calculate since they are based on the
amplitude of the EMG signal (Christopher et al.,
2018)
The collected data from the EMG and FMG signals
of each muscle group, that consists on the relevant
characteristics that were extracted, is used as input for
the training of the Machine Learning models, through
MATLAB's Classification Learner, in order to predict
the execution of each gesture.
3.2 Feature Selection
The preliminary results of this study show
significant advances in the development of the
gesture recognition system. In a first phase, a
preliminary comparison of the thirty-three available
classification models was made, using accuracy (or
"effectiveness") as the main metric. In this study,
these thirty-three classification models were trained
and evaluated, using the built-in algorithms of the
MATLAB Classification Learner tool. The
techniques applied ranged from more linear
approaches, such as Quadratic Discriminant, to more
sophisticated methods, including SVMs and Neural
Network architectures. From these study six
classification models can be highlighted: Linear
Discriminant, Quadratic SVM, Cubic SVM and three
Neural Network architectures (Narrow, Medium
and Wide). These models were trained with different
Gesture Recognition Through the Implementation of a Bimodal Acquisition System Using EMG and FMG Signals
1023

Figure 6: (a) Dataset for each gesture. (b) Distribution of the amount of features extracted per muscle and per sensor type. (c)
4 features are extracted from FMG and EMG signals simultaneously (green), 8 features from EMG signal (red) and 2 features
from FMG signal (black).
Figure 7: Confusion matrices for the Wide Neural Network model. (a) validation (b) test.
feature selection methods - ANOVA, ReliefF and
Kruskal Wallis - and varying the percentage of
selected features (75, 50 or 25%). standing out with
100% of the features, achieving validation and test
accuracies of 91.7% and 93.8%, respectively. On the
other hand, the classifiers based on neural networks
showed a greater variability in their results, indicating
a sensitivity to the selection of features. In particular,
the wide neural network showed excellent
performance without feature selection, achieving
validation and testing accuracies of 95.1% and
93.8%, respectively.
Figure 7 shows the confusion matrices for an
example of the trained models (Wide Neural
Network), to show that these matrices help to
understand how each model handles the different
classes and provide a visual understanding of the
models' performances.
(a)
(b)
(c)
T
r
ue
C
l
ass
open
close
open
close
open
close
(a) (b)
WHC 2025 - Special Session on Wearable HealthCare
1024
Table 3: Comparison of the accuracy of the classifiers between the use of all data, EMG only and FMG only.
Classifier Model Validation
(EMG +FMG)
Test (EMG
+FMG)
Validation
(EMG)
Test
(EMG)
Validation
(FMG)
Test
(FMG)
Linear Discriminant
74,07 75,46 62,96 64,35 50,69 53,24
Quadratic SVM
89,35 87,96 79,28 75 65,16 68,06
Cubic SVM
89,24 87,96 79,4 79,63 70,49 70,37
Narrow NN
79,51 78,7 73,96 74,54 63,19 68,52
Medium NN
85,07 81,02 74,54 75 59,49 60,19
Wide NN
88,43 82,41 78,47 79,17 67,25 68,06
3.3 Bimodal vs EMG vs FMS Efficacy
In this section, we explore the impact of combining
EMG and FMG characteristics on the performance of
classifiers. To this end, the bimodal approach was
contrasted with the more common practice that uses
exclusively EMG characteristics. Table 3 details the
performance of the six classifiers indicated above,
when they use all characteristics, only EMG
characteristics and only FMG characteristics.
4 DISCUSSION
This paper presents preliminary results of the
implementation of a bimodal sys-tem with EMG and
FMG sensors in which two EMG+FMG pairs are
placed in the flexor and extensor muscles. A total of
thirty-six characteristics of these two acquired signals
were used for three healthy individuals, and the
dataset consisted of five different gestures. The main
objective of this study is to evaluate the benefit, in
terms of efficacy in the recognition of the gestures
performed, that is obtained by the acquisition of the
FMG signal simultaneously with the EMG signal,
because this signal when used in isolation has some
limitations that result, for example, from variations in
the impedance of the skin interface.
MATLAB's Classification Learner was used, thirty-
one classifiers were applied and a study was also
made on the possibility of reducing the number of
characteristics, which will be an important point to
reduce the processing time and consequently the
response time of the bionic hand in the execution of
gestures. For this, three different methods of selection
of the characteristics were used, with different
percentages (75%, 50% and 25%) of the total of
thirty-six characteristics.
The preliminary results presented focus on the
most used metric which is accuracy but the results are
also being analyzed with other metrics, namely, F-
score and the area under the ROC curve. It is possible
to verify how different classifiers have very different
behaviors, with those that are more effective but more
sensitive to the reduction of the number of
characteristics and others that are more immune to
this selection of characteristics.
Although this evaluation of the bimodal system is
still ongoing, the results presented here reinforce the
idea, supported by previous research, that the
combination of EMG and FMG allows to improve the
efficiency of machine learning models in gesture
recognition. So, as ultimate conclusion, this study
contributes to the field of myoelectric prostheses by
exploring the implementation and testing the
efficiency of a bimodal EMG/FMG signal acquisition
system for the control of a bionic hand.
REFERENCES
Marques, J, Ramos, S, Macedo, M.P, da Silva, H.P (2020).
Study of Mechanomyographic Alternatives to EMG
Sensors for a Low-Cost Open Source Bionic Hand. In:
Inácio, P., Duarte, A., Fazendeiro, P., Pombo, N. (eds)
5th EAI International Conference on IoT Technologies
for HealthCare. HealthyIoT 2018. EAI/Springer
Innovations in Communication and Computing.
Springer, Cham.
Silva, D, Castro, S, Macedo, M.P. and Silva, H.P. (2019).
Towards Improving the Usability of Muscle Sensing in
Open Source Bionic Hand: Mechanomyography vs.
Electromyography with Novel Electrodes”. AmiEs-
2019 - International Symposium on Ambient Intel-
ligence and Embedded Systems, 1-6.
Grushko, S., Spurný, T., & Černý, M. (2020). Control
Methods for Transradial Prostheses Based on Remnant
Muscle Activity and Its Relationship with
Proprioceptive Feedback. Sensors, 20(17).
McIntosh, J., McNeill, C., Fraser, M., Kerber, F.,
Löchtefeld, M., & Krüger, A. (2016). EMPress:
Practical Hand Gesture Classification with Wrist-
Mounted EMG and Pressure Sensing. 2332–2342.
Abboudi, R. L., Glass, C. A., Newby, N. A., Flint, J. A., &
Craelius, W. (1999). A biomimetic controller for a
Gesture Recognition Through the Implementation of a Bimodal Acquisition System Using EMG and FMG Signals
1025

multifinger prosthesis. IEEE Transactions on
Rehabilitation Engineering, 7(2), 121–129.
Christopher, S., Md Rasedul, I., Assad-Uz-Zaman, M., &
Rahman, M. (2018). A Comprehensive Study on EMG
Feature Extraction and Classifiers. Open Access
Journal of Biomedical Engineering and its
Applications, 1.
Citi, L., Vidoni, R., Menoncmenon, C., Cho, E., Chen, R.,
Merhi, L.-K., Xiao, Z., Pousett, B., & Menon, C.
(2016). Force Myography to Control Robotic Upper
Extremity Prostheses: A Feasibility Study. 4.
Kadkhodayan, A., Jiang, X., & Menon, C. (2016).
Continuous Prediction of Finger Movements Using
Force Myography. Journal of Medical and Biological
Engineering, 36(4), 594–604.
Radmand, A., Scheme, E., & Englehart, K. (2016). High-
density force myography: A possible alternative for
upper-limb prosthetic control. Journal of Rehabilitation
Research and Development, 53, 443–456.
Jiang, X., Merhi, L.-K., Xiao, G. Menon, C. (2017).
Exploration of force myography and surface
electromyography in hand gesture classification,
Medical Engineering & Physics, 41, 63–73.
Jaquier, N., Connan, M., Castellini, C., & Calinon, S.
(2017). Combining Electromyography and Tactile
Myography to Im-prove Hand and Wrist Activity
Detection in Prostheses. Technologies, 5, 64.
Nowak, M., Eiband, T., & Castellini, C. (2017). Multi-
modal myocontrol: Testing combined force- and
electromyography. IEEE ... International Conference
on Rehabilitation Robotics : [proceedings], 2017,
1364–1368.
Xiao, Z. G., & Menon, C. (2017). Performance of Forearm
FMG and sEMG for Estimating Elbow, Forearm and
Wrist Positions. Journal of Bionic Engineering, 14(2),
284–295.
Jiang, S., Gao, Q., Liu, H., & Shull, P. B. (2020). A novel,
co-located EMG-FMG-sensing wearable armband for
hand gesture recognition. Sensors and Actuators A:
Physical, 301, 111738..
Xiao, Z. G., & Menon, C. (2019). A Review of Force
Myography Research and Development. Sensors,
19(20).
Rodrigues, S. and Macedo, M.P.: Algorithm for
Onset/Offset Detection of EMG Signals for Real-time
Control of a Low-Cost Open-Source Bionic-Hand. In
Proceedings of the 15th Int. Joint Conf. on Biomedical
Engineering Systems and Technologies – WHC, 872-
878. (2022).
Rodrigues, S., Macedo, M.P. (2023). A Low-Cost Open-
Source Bionic Hand Controller: Preliminary Results
and Perspectives. In: Spinsante, S., Iadarola, G.,
Paglialonga, A., Tramarin, F. (eds) IoT Technologies
for HealthCare. HealthyIoT 2022. Lecture Notes of the
Institute for Computer Sciences, Social Informatics and
Telecommunications Engineering, vol 456. Springer,
Cham.
Esposito, D., Andreozzi, E., Fratini, A., Gargiulo, G. D.,
Savino, S., Niola, V., & Bifulco, P. (2018). A
piezoresistive sensor to measure muscle contraction
and mechanomyography. Sensors (Switzerland), 18(8).
Rafiee, J., Rafiee, M. A., Yavari, F. and Schoen, M. P.
(2011). “Feature extraction of forearm EMG signals for
prosthetics,” Expert Systems with Applications, vol.
38, no. 4, pp. 4058–4067.
Pires, N. (2023). Reconhecimento de gestos através da
implementação de sistema bimodal de aquisição de
sinais EMG e FMG [[Unpublished Biomed. Eng. BSc,
thesis]. Polytechnic Institute of Coimbra.
WHC 2025 - Special Session on Wearable HealthCare
1026
