OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
Dominik Kulmer
† a
, Maximilian Leitenstern
b
, Marcel Weinmann
c
and Markus Lienkamp
d
Institute of Automotive Technology, Munich Institute of Robotics and Machine Intelligence,
Technical University of Munich, Garching, Germany
Keywords:
Mapping, Localization, SLAM, Georeferencing.
Abstract:
Accurate localization is a critical component of mobile autonomous systems, especially in Global Navigation
Satellite Systems (GNSS)-denied environments where traditional methods fail. In such scenarios, environ-
mental sensing is essential for reliable operation. However, approaches such as LiDAR odometry and Simul-
taneous Localization and Mapping (SLAM) suffer from drift over long distances, especially in the absence of
loop closures. Map-based localization offers a robust alternative, but the challenge lies in creating and georef-
erencing maps without GNSS support. To address this issue, we propose a method for creating georeferenced
maps without GNSS by using publicly available data, such as building footprints and surface models derived
from sparse aerial scans. Our approach integrates these data with onboard LiDAR scans to produce dense,
accurate, georeferenced 3D point cloud maps. By combining an Iterative Closest Point (ICP) scan-to-scan
and scan-to-map matching strategy, we achieve high local consistency without suffering from long-term drift.
Thus, we eliminate the reliance on GNSS for the creation of georeferenced maps. The results demonstrate that
LiDAR-only mapping can produce accurate georeferenced point cloud maps when augmented with existing
map priors.
1 INTRODUCTION
Localization is essential for mobile autonomous sys-
tems, enabling them to navigate and interact with
their environment effectively. In recent years, signifi-
cant advancements have been made in LiDAR odom-
etry (Vizzo et al., 2023; Zheng and Zhu, 2024b),
LiDAR-inertial odometry (Bai et al., 2022; Xu et al.,
2022; Zheng and Zhu, 2024a), and Simultaneous Lo-
calization and Mapping (SLAM) (Dellenbach et al.,
2022; Yifan et al., 2024; Koide et al., 2024b; Pan
et al., 2024). Despite their advances, these methods
remain prone to drift, especially during long-term op-
erations. While loop closure can help reduce drift by
aligning the current position with a previously visited
location, it does not guarantee an accurate reconstruc-
tion of the intermediate path. Additionally, loops are
not always present, especially in linear or open-ended
trajectories.
Map-based localization offers an alternative by us-
ing pre-existing maps to constrain localization and
a
https://orcid.org/0000-0001-7886-7550
b
https://orcid.org/0009-0008-6436-7967
c
https://orcid.org/0009-0008-7174-4732
d
https://orcid.org/0000-0002-9263-5323
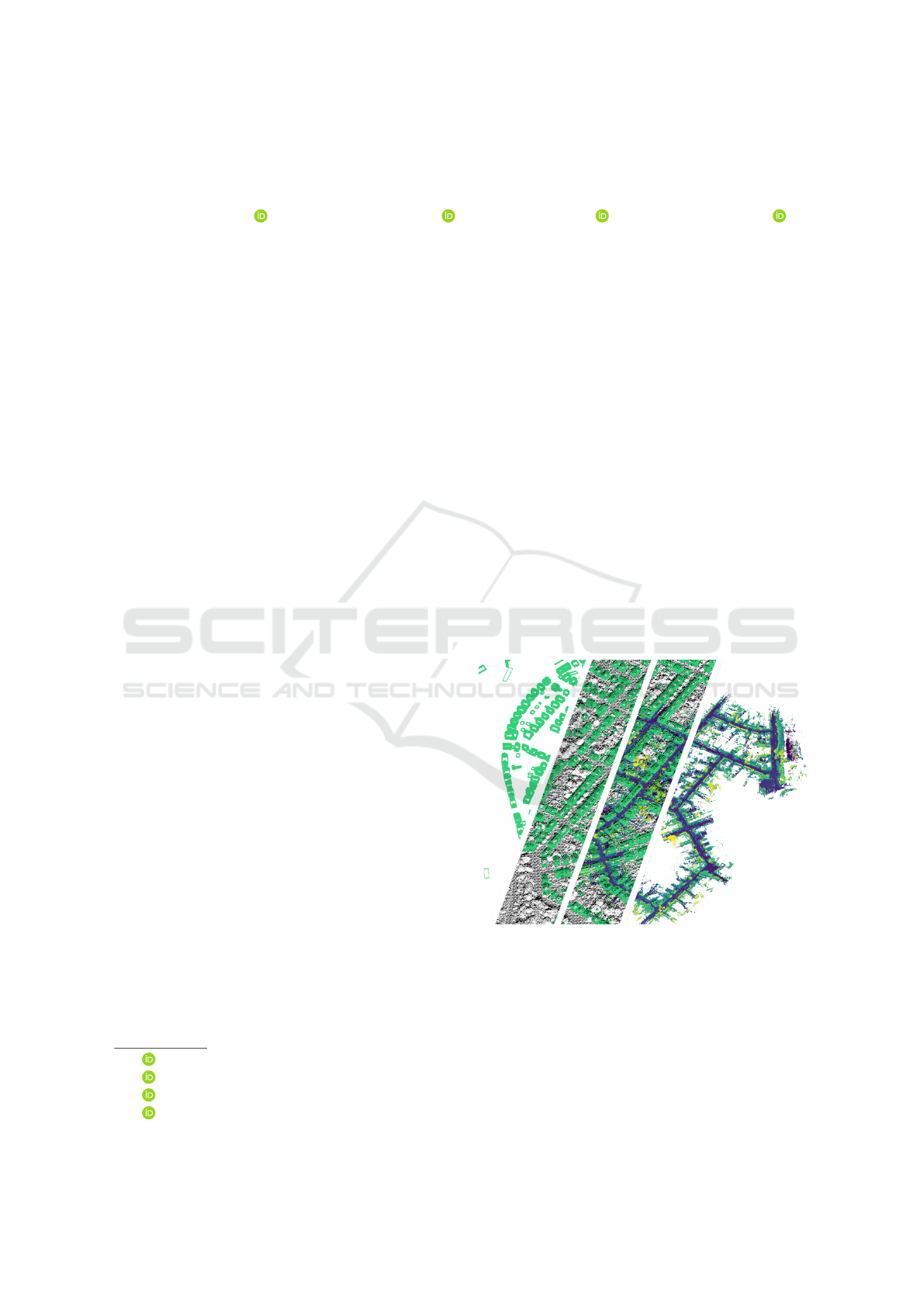
Figure 1: Representation of the different map priors and
formats from the building approximations on the left to the
final georeferenced point cloud map on the right for KITTI
Seq. 00.
eliminate drift. However, these algorithms rely on the
availability of maps, which limits their applicability
in unknown environments where LiDAR odometry,
LiDAR-inertial odometry, and SLAM excel. Open-
178
Kulmer, D., Leitenstern, M., Weinmann, M. and Lienkamp, M.
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors.
DOI: 10.5220/0013405400003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 178-188
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

StreetMap
1
(OSM), a globally available web-based
platform, provides maps that can be used for localiza-
tion with minimal geographic constraints. However,
these standard-definition (SD) maps cannot support
high-precision localization due to their limited accu-
racy.
High-definition (HD) maps represent the environ-
ment at a resolution of 10 cm to 20 cm (Jeong et al.,
2022) and are ideal for precise localization (Koide
et al., 2019; Koide et al., 2024a). These maps typ-
ically consist of high accuracy point cloud maps.
However, the map generation process suffers from
the same drift and accuracy issues as the localization
itself. Global Navigation Satellite Systems (GNSS)
offer a global reference to mitigate drift and enable
georeferenced mapping. However, their signals are
highly susceptible to degradation in obstructed en-
vironments. This vulnerability significantly reduces
their reliability for producing high-precision maps.
This work addresses these challenges by propos-
ing a method for high-definition map generation that
combines publicly available building maps and sur-
face models with onboard LiDAR data. By leverag-
ing these resources, the approach eliminates reliance
on GNSS and enables the creation of accurate, geo-
referenced point cloud maps (Figure 1).
The main contribution of this paper is a pose-
graph-based optimization algorithm that combines It-
erative Closest Point (ICP) scan-to-scan with scan-to-
map matching of publicly available building data and
sparse surface models to generate accurate georefer-
enced point cloud maps without the need for GNSS
data. While scan-to-map matching regulates long-
term drift, scan-to-scan matching maintains local con-
sistency between individual LiDAR scans. It also en-
ables the approach to compensate for missing build-
ings and outdated map data or to bridge short areas
not present on the sparse prior map.
Our approach uses neither learning-based meth-
ods, feature extraction techniques, nor loop closures.
We show that the approach works with a single pa-
rameter set on different platforms, like vehicles and
segways, with different LiDAR setups, ranging from
a single 32-channel LiDAR to a modern multi-LiDAR
setup, and in various environments, such as residen-
tial and rural regions.
In sum, we make four claims: Our approach is
able to (I) map long sequences without accumulat-
ing drift over time; (II) automatically georeference the
generated map without GNSS data; (III) keep a high
local consistency of the generated map; (IV) yield
promising results on multiple robotic platforms, Li-
DAR setups and environments without further tuning.
1
www.openstreetmap.org
To build on our work, we pro-
vide an open-source implementation at:
https://github.com/TUMFTM/OpenLiDARMap
2 RELATED WORK
When available, high-precision RTK-GNSS signals
are often used for georeferenced mapping, requiring
precise time synchronization between sensors and op-
timal signal reception along the mapped route. How-
ever, GNSS signal interruptions, such as in urban
canyons or underpasses, pose a challenge to con-
tinuous mapping. Hybrid pipelines have been pro-
posed to deal with signal interruption. These typ-
ically involve creating an initial map using LiDAR
odometry or SLAM, followed by post-processing to
georeference the map using GNSS data (Leitenstern
et al., 2024). While this approach can bridge short
gaps without GNSS, it remains dependent on inter-
mittent signal availability. SLAM techniques fused
with GNSS signals can also produce georeferenced
maps (Koide et al., 2019; Cramariuc et al., 2023;
Dellaert, 2022), but require careful tuning of sen-
sor weights and suffer from the same dependency on
GNSS signal quality.
OSM represents an alternative to GNSS for global
localization and mapping, relying on widely avail-
able crowdsourced map data. (Floros et al., 2013)
improved global localization accuracy by combining
visual odometry with Monte Carlo localization, us-
ing chamfer matching to align trajectories with OSM
maps. (Suger and Burgard, 2017) proposed a proba-
bilistic navigation method that aligns 3D-LiDAR sen-
sor data with OSM tracks using semantic terrain infor-
mation and a Markov-Chain Monte Carlo framework.
(Yang et al., 2017) introduced a Gaussian-Gaussian
cloud model for visual odometry, where OSM road
constraints help mitigate drift and resolve scale am-
biguities. (Yan et al., 2019) used OSM to create
orthophoto-style images of roads and building foot-
prints and generated semantic descriptors to match
LiDAR data. (Ballardini et al., 2021) introduced a lo-
calization method that detects building facades using
stereo image-based point clouds and matches them
with 3D building models from OSM. Similarly, (Cho
et al., 2022) computed angular distances to buildings
within OSM and produced descriptors that match Li-
DAR data to achieve localization. (Elhousni et al.,
2022) used a particle filter to integrate LiDAR point
clouds with OSM constraints such as road bound-
aries, improving accuracy by exploiting map geom-
etry. (Frosi et al., 2023) extended this concept by
combining SLAM with OSM priors, integrating 2D
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
179

building geometry into trajectory estimation through
LiDAR scan matching.
These methods highlight the diverse applications
of OSM in reducing drift for mapping and localiza-
tion in the absence of GNSS signals. However, chal-
lenges such as limited accuracy and dependence on
map accuracy remain.
Satellite or aerial imagery is another alternative
for georeferenced mapping by aligning ground-level
observations with overhead map features. (Miller
et al., 2021) presented a cross-view localization
framework that leverages semantic LiDAR point
clouds alongside top-down RGB satellite imagery for
georeferenced mapping. Similarly, (Xia et al., 2024)
refined cross-view localization techniques to operate
effectively in areas lacking fine-grained ground truth,
relying on coarse satellite or map data to improve ac-
curacy. However, the inherent misalignment between
ground observations and aerial imagery remains a per-
sistent challenge, often resulting in significant local-
ization errors.
Pure LiDAR odometry and SLAM methods lack
georeferencing, while GNSS-based approaches re-
main vulnerable to environmental interference and
signal loss. OSM-based methods, while independent
of GNSS, rely on the accuracy of crowd-sourced maps
that may be outdated or inaccurate. Satellite data pro-
vides broad coverage but often suffers from alignment
problems between ground and aerial imagery.
These limitations highlight the need for novel
approaches that can achieve georeferenced mapping
without relying on GNSS.
3 GEOREFENCED POINT
CLOUD MAPPING
In this section, we explain our LiDAR-based point
cloud mapping approach. The main idea is to com-
bine scan-to-scan matching with scan-to-map match-
ing of reference maps of publicly available build-
ing information and sparse surface models in a pose-
graph optimization framework. The advantage of our
method is that we maintain high local consistency
while eliminating long-term drift without the need for
additional sensors. Our mapping procedure can be
summarized in five steps (Figure 3); while the first
one is done beforehand, the others are performed for
each input frame:
1. Generating a sparse reference point cloud map
from openly available building data and surface
models.
2. Scan matching of the current LiDAR scan and the
Figure 2: Exemplary illustration of a combined sparse
point cloud map of (green) approximated building data and
(black) the surface model with a ground sampling distance
of 1 m around the starting position of KITTI Seq. 00.
sparse reference map.
3. Scan matching of the current LiDAR scan and a
local submap of previous LiDAR scans.
4. Performing a graph optimization of the resulting
poses.
5. Estimating the initial guess for the next LiDAR
scan from a constant distance and rotation as-
sumption.
3.1 Generating Sparse Reference Maps
OSM provides, besides road infrastructure data,
building outlines for much of the world. In addi-
tion to geometric outlines, OSM can store semantic
attributes such as building height or number of sto-
ries. Beyond OSM, other publicly available local data
sources, such as Germany’s open data portal
2
, provide
detailed building information. From this data, sparse
georeferenced three-dimensional point clouds can be
generated. Depending on data availability, a simpli-
fied building representation is derived from OSM data
or more sophisticated building models, such as those
from the German open data portal. While building
models can directly be approximated as a point cloud
due to their inherent spatial representation, OSM data
requires an estimation for building heights. We as-
sume a height of 4 m per floor, with a default height of
8 m for untagged buildings. The resulting point cloud
approximates the building shape using a tessellation
with an edge length of 0.5 m.
In addition to building data, three-dimensional
surface measurements are available for many regions
of the world
2345
. These surface measurements are
2
www.govdata.de
3
www.data.europa.eu
4
www.data.gov.uk
5
www.usgs.gov
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
180
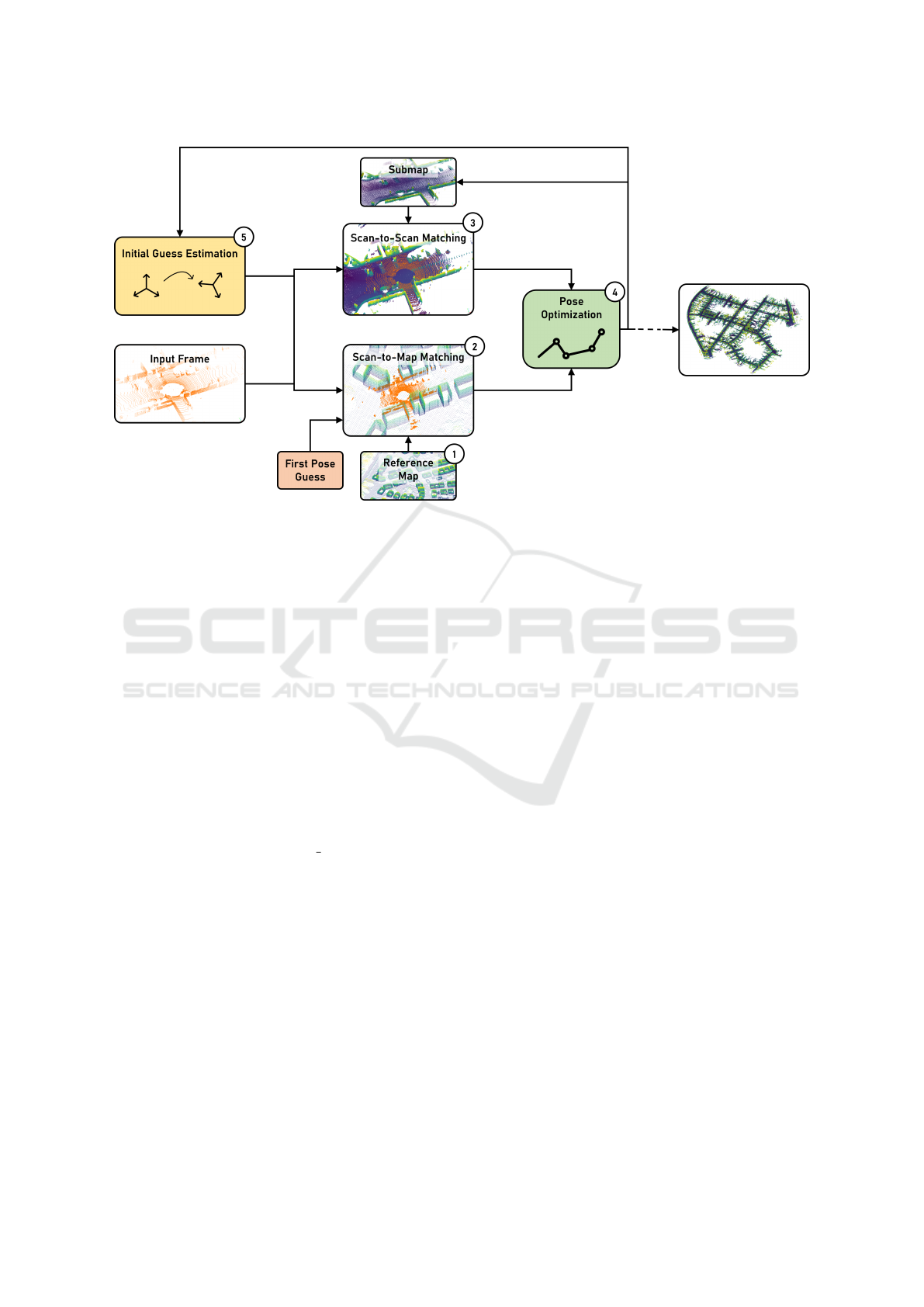
Figure 3: Pipeline overview that shows our main steps to generate georeferenced point cloud maps. Starting with (1) the
sparse reference map, which is used for (2) the scan-to-map matching. (3) shows the scan-to-scan matching. The two results
are then optimized with (4) a pose-graph optimization, resulting in the final pose, which is then used for (5) the initial guess
estimation for the next LiDAR frame.
typically provided as either surface models or eleva-
tion models with varying ground sampling distances,
often in the region of 1 m to 5 m. Surface models
capture raw LiDAR scans or a downsampled subset,
while elevation models represent the terrain alone, ex-
cluding vegetation and structures. This data is just an-
other representation of point clouds. Therefore, it can
be combined with the building point cloud data to cre-
ate a sparse georeferenced point cloud map (Figure 2).
We use this map as a reference in the following scan-
to-map matching.
3.2 Scan-to-Map Matching
Our approach is based on small gicp (Koide, 2024),
a lightweight, header-only C++ library designed for
point cloud preprocessing and scan matching. We
adopt a voxel hash map as our data structure to
efficiently handle large point clouds, allowing fast
nearest-neighbor searches. The data within each
voxel is stored according to the linear iVox princi-
ple (Bai et al., 2022).
The current input frame is pre-processed with a
voxel-based downsampling before the scan matching.
The parameters for our entire processing chain can be
taken from subsection 3.6.
A manual initial pose estimate on the map is pro-
vided for the first input frame and subsequently re-
fined through scan-to-map matching. For subsequent
frames, the initial estimate is derived from the re-
sults of the pose-graph optimization, as described in
subsection 3.5. The scan matching process uses the
ICP algorithm for its simplicity and robustness. Out-
liers are managed using the Geman-McClure robust
kernel, and the optimization is carried out using the
Gauss-Newton method. The scan matching process
returns a global pose within our reference map.
3.3 Scan-to-Scan Matching
The same procedure used for scan-to-map matching
is applied to scan-to-scan matching, using the same
pre-processing, data structure, and optimization.
For scan-to-scan matching, a local submap of the
environment is incrementally constructed. The first
input frame serves as the registration target for the
subsequent scan frame. If the relative transformation
between consecutive frames is below 0.1 m, the sys-
tem assumes a static state. Therefore, no pose is pro-
vided for the optimization, and the optimization pro-
cess for both scan-to-scan and scan-to-map matching
is skipped. In dynamic scenarios, as defined by this
threshold, the scan-to-scan matching outputs the rela-
tive transformation.
After the pose-graph optimization, the current
frame is integrated into the local submap using the
determined transformation. To maintain a local rep-
resentation of the environment, any voxels in the
submap that are more than 100 m from the current po-
sition are removed. From the second frame onward,
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
181

scan matching is performed against this evolving local
submap rather than solely against the previous frame.
This approach is inspired by KISS-ICP (Vizzo et al.,
2023) and leverages the initial pose estimation de-
scribed in subsection 3.5.
3.4 Pose-Graph Optimization
Our approach integrates scan-to-scan and scan-to-
map matching into an optimization framework using
the Ceres solver (Agarwal and Mierle, 2023). The
optimization problem is formulated as a non-linear
least squares problem (Equation 1), where residuals
are minimized to align the current pose estimate with
the scan matching results.
min
x
1
2
∑
i
ρ
i
|| f
i
(x
i
1
, ·· · , x
i
k
)||
2
(1)
ρ
i
represents a loss function to reduce the in-
fluence of outliers on the solution. f
i
( ) is the
cost function, which depends on the parameter block
(x
i
1
, ·· · , x
i
k
).
Unlike batch optimization methods, which pro-
cess all frames simultaneously, the proposed ap-
proach employs frame-by-frame optimization. For
each frame, the residuals are computed as the devi-
ation between the initial pose estimate and the results
obtained from scan-to-scan and scan-to-map match-
ing. Scan-to-map constraints represent absolute pose
estimates derived from aligning the current frame
to the sparse map. Scan-to-scan constraints rep-
resent relative transformations between consecutive
frames, linking absolute poses through relative mea-
surements. These assemble a classic pose-graph opti-
mization problem.
To mitigate the influence of outliers, residuals are
weighted using a robust loss function to reduce the
impact of large deviations on the final solution. We
use a Tukey loss to aggressively suppress large devia-
tions for the scan-to-map constraints. For the scan-to-
scan matching, we use the softer Cauchy loss. These
weights reduce the influence of outliers, which are
particularly likely in scan-to-map matching due to de-
viations between the sparse reference map and the
current LiDAR frame. To maintain the reliability of
scan-to-map constraints, they are only incorporated
into the optimization process if the number of point
inliers exceeds 50 % of the correspondences between
the current frame and the sparse map. This crite-
rion ensures that only sufficiently aligned frames con-
tribute to the optimization, mitigating the effect of
poor matches.
The optimization framework balances relative
constraints from scan-to-scan matching with absolute
constraints from scan-to-map matching, providing ac-
curate and drift-corrected pose estimates. The result
of the optimization is a georeferenced pose computed
from the results of the scan-to-scan and scan-to-map
matching.
3.5 Estimating the Initial Guess
We use a constant distance and rotation model for the
initial pose estimation. The delta translation between
the previous and current position is applied to the cur-
rent position to estimate the next initial position.
t
x+1
= t
x
+ (t
x
− t
x−1
) (2)
For the rotation we use a spherical quaternion ex-
trapolation through slerp (Equation 3) with a scalar of
s = 2.
sler p(q
x−1
, q
x
, s) = q
x−1
(q
−1
x−1
q
x
)
s
(3)
This straightforward method eliminates the need
for time stamping across point clouds or individual
points, simplifying the implementation. In addition,
the lack of a complex kinematic model enhances the
versatility of the approach, allowing seamless appli-
cation across different robotic platforms without the
need to modify the methodology.
3.6 Parameters
We use a single set of parameters for both scan-to-
scan and scan-to-map matching, as well as for all sub-
sequent evaluations. This design choice is aimed at
simplicity, minimizing the number of parameters and
allowing for a more straightforward system configu-
ration.
Each input frame is downsampled with a 1.5 m
voxel filter to reduce the computational load. The
voxel maps are constructed with a resolution of 1 m
and can store up to 10 points per voxel, maintain-
ing a minimum distance of 0.1 m between individual
points.
For the nearest neighbor search, we consider 27
neighboring voxels within a 3x3x3 cube around the
query point. A correspondence threshold of 6 m is
applied to filter out invalid associations during scan
matching. For all robust kernels used in the opti-
mization process, we use a static kernel width of 1.0
to ensure consistent outlier handling throughout the
pipeline.
4 EXPERIMENTAL EVALUATION
We present our experiments to show the capabilities
of our method. The results of our experiments sup-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
182

port our key claims, namely that we can (I) map long
sequences without accumulating drift over time; (II)
automatically georeference the generated map with-
out GNSS data; (III) keep a high local consistency
of the generated map; (IV) yield promising results on
multiple robotic platforms, LiDAR setups and envi-
ronments without further tuning.
4.1 Experimental Setup
We evaluate our method on the three different long-
distance datasets KITTI Seq. 00 (Geiger et al., 2012;
Geiger et al., 2013), NCLT 2013-01-10 (Carlevaris-
Bianco et al., 2016), and EDGAR Campus, each us-
ing different robot platforms and sensor setups. The
characteristics can be found in Table 1. The KITTI
dataset is a widely accepted benchmark for evalu-
ating localization and mapping algorithms. Follow-
ing the approach demonstrated by IMLS-SLAM (De-
schaud, 2018) and later adopted by others, such as
KISS-ICP (Vizzo et al., 2023) and CT-ICP (Dellen-
bach et al., 2022), we apply a correction to the intrin-
sic calibrations around the vertical axis. Specifically,
the point clouds are adjusted by an angle of 0.375
◦
to
ensure accurate alignment.
The NCLT dataset employs a Segway platform,
introducing significant challenges due to the vehi-
cle’s high dynamics and diverse environmental condi-
tions. The dataset encompasses outdoor scenes rang-
ing from wide-open parking areas to narrow building
passages.
The EDGAR dataset is the longest of the three
tested datasets and covers the Technical University of
Munich campus in Garching, Germany. It includes a
variety of environments, from building complexes and
extensive parking areas to country roads, with vehi-
cle speeds ranging from low speeds up to 70 kmh
−1
.
The route traverses both dense and sparsely built-up
areas. Unlike KITTI and NCLT, EDGAR features a
multi-LiDAR setup, consisting of two spinning and
two solid-state LiDARs, which enhances data rich-
ness and coverage. While the first two datasets are
freely available, the EDGAR Campus dataset is pro-
prietary. Information about the sensor setup can be
found in (Karle et al., 2023; Kulmer et al., 2024).
All vehicles are equipped with RTK-GNSS sys-
tems to provide the ground truth data.
The quality of the maps created cannot be an-
swered with a single metric. A distinction is made
between global deviations, such as drift, and local in-
consistencies.
Table 1: Caracteristic of the datasets used for the evaluation.
Dataset
Length
[m]
Frames
[#]
Sensor
Setup
Scenario
KITTI
Seq. 00
3724 4541 Velodyne HDL-64 outdoor, residential, car
NCLT
2013-01-1
1311 5120 Velodyne HDL-32E outdoor/indoor, residential, segway
EDGAR
Campus
5289 9104
2x Ouster OS1-128
2x Seyond Falcon
outdoor, rual/residential, car
4.2 Global Displacement Evaluation
We evaluate our approach using the Absolute Tra-
jectory Error (ATE) and the KITTI metric for the
Relative Trajectory Error (RTE). The KITTI met-
ric samples the trajectory into segments of varying
lengths, ranging from 100 m to 800 m, and calcu-
lates the average relative translational and rotational
errors. While the ATE measures the global deviation
of the estimated trajectory from the ground truth, the
KITTI metric provides insights into the accuracy over
medium-length segment pieces.
We compare our approach with three OSM-based
global localization and mapping methods and a satel-
lite imagery-based approach for the ATE evalua-
tion. Additionally, we include KISS-ICP as a LiDAR
odometry baseline for comparison. However, open-
source code is unavailable for all three of the OSM-
based methods, and the repository for the imagery-
based method is outdated. As a result, we rely on the
published data from their respective published works.
To enable a comparison with the ground truth, which
is positioned in a local coordinate system originating
in the first frame, we transform our georeferenced re-
sults into the first frame to obtain the same local repre-
sentation. Then, we calculate the mean and maximum
ATE using the ground truth data with evo
6
.
The results listed in Table 2 demonstrate that our
approach reduces the mean ATE by more than half
compared to the next best method. Furthermore, our
method achieves a mean ATE that is a magnitude
lower than the LiDAR odometry approach. Figure 4
shows that our method accumulates no drift over the
traversed distance. Notably, we observe an unusually
high deviation in a specific section compared to the
rest of the trajectory. Figure 4 (I) and (II) show the
point cloud generated from the ground truth data and
our approach for this section. We identify significant
deviations in the provided ”ground truth” data for the
two passes of the section, particularly with vertical
offsets exceeding 1 m in some regions. Hence, the
ground truth provided by KITTI cannot be regarded as
accurate values, affecting the overall evaluation and
the metrics presented.
6
https://github.com/MichaelGrupp/evo
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
183
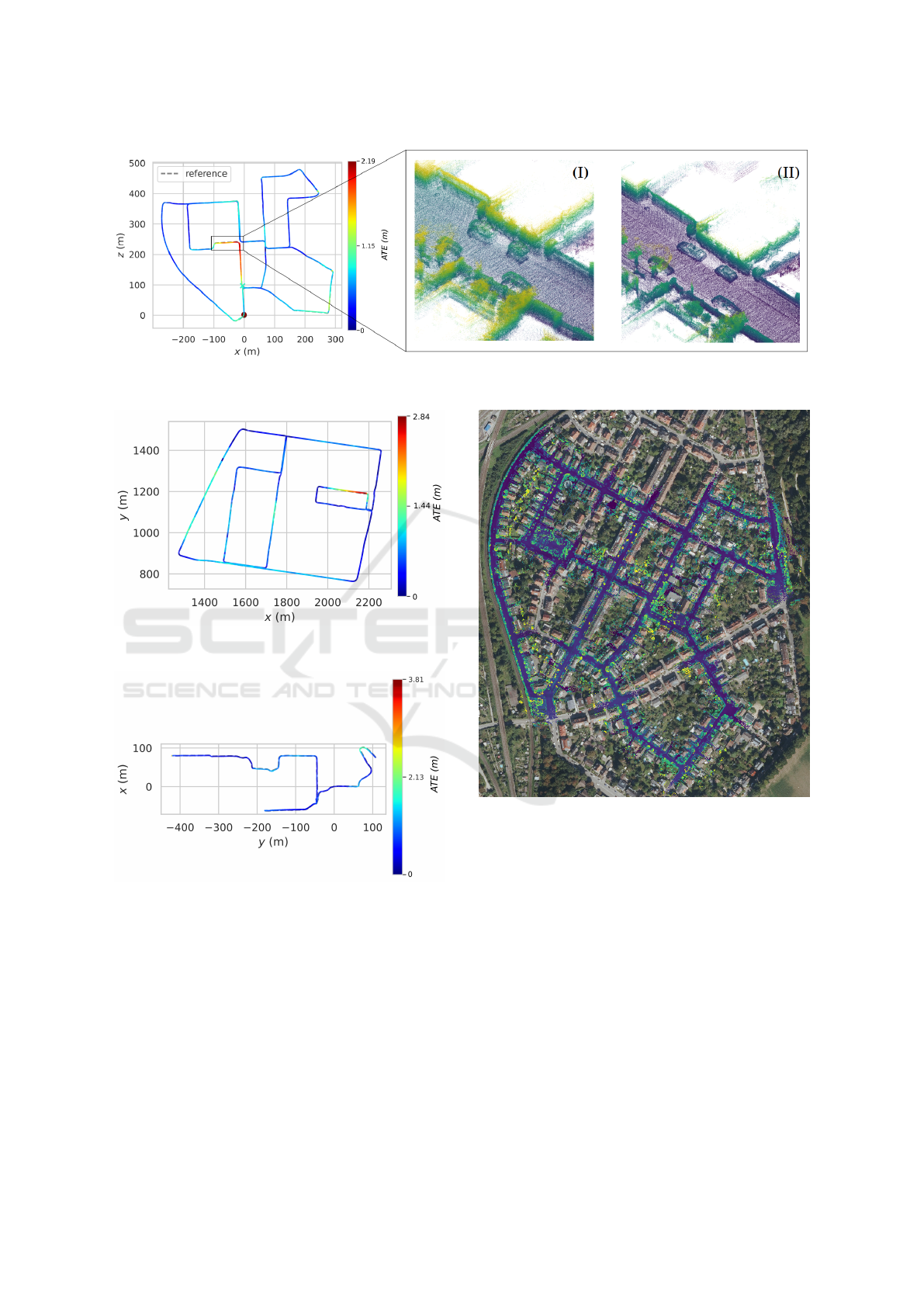
Figure 4: Absolute Trajectory Error (ATE) of our approach for KITTI Seq. 00. (I) Point cloud created from the ”ground truth”
data. (II) Point cloud created with our approach.
Figure 5: Absolute Trajectory Error (ATE) of our approach
for the EDGAR Campus dataset.
Figure 6: Absolute Trajectory Error (ATE) of our approach
for the NCLT 2013-01-1 dataset.
Beyond the KITTI dataset, we demonstrate simi-
lar performance for the NCLT and EDGAR datasets,
where our method exhibits no drift over time. On the
EDGAR dataset, again the largest ATEs occur in the
section with bad GNSS signals, most likely due to the
signal blockage caused by underpasses and tall build-
ing walls (Figure 5). For NCLT, although deviations
are the largest, our pose estimation remains robust de-
spite the challenging dynamics and even across an un-
mapped indoor section (Figure 6).
Figure 7: KITTI Seq. 00 point cloud map, created with our
approach, plotted to the orthophoto of Karlsruhe.
We obtain a global pose directly from our ap-
proach and only transform it into a local coordinate
system for evaluation. On Figure 7, we show the over-
load of the directly generated map by our approach on
georeferenced orthophotos of Karlsruhe
2
.
In addition to the ATE, we also evaluated the
RTE using the KITTI methodology (Table 3). For
the KITTI dataset, our approach is outperformed by
the LiDAR odometry algorithm KISS-ICP. This result
can be attributed to the high consistency and smooth
trajectory generated by KISS-ICP, which minimizes
drift over the short averaged segments used in the
KITTI metric. However, on the NCLT dataset, which
features high dynamics and a challenging environ-
ment, our method demonstrates a better performance.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
184

Table 2: Mean and max Absolute Trajectory Error (ATE) in [m] for the evaluated datasets. Bold represents the best results
and underscores the second-best results.
Method Reference
KITTI Seq. 00 NCLT 2013-01-1 EDGAR Campus
mean ↓ max ↓ mean ↓ max ↓ mean ↓ max ↓
RC-MVO (Yang et al., 2017) 3.76 14.01 - - - -
AWYLaI (Miller et al., 2021) 2.0 12.0 - - - -
LiDAR-OSM (Elhousni et al., 2022) 1.37 3.34 - - - -
OSM-SLAM (Frosi et al., 2023) 3.15 11.06 - - - -
KISS-ICP (Vizzo et al., 2023) 6.71 15.20 3.26 15.99 66.40 259.13
OpenLiDARMap (ours) 0.66 2.19 1.02 3.81 0.52 2.84
Similarly, the advantages of our approach are evident
on the EDGAR dataset, where we maintain consistent
trajectories over long distances without drift, leading
to lower relative errors.
To assess how well our approach per-
forms compared to pure scan-to-map algo-
rithms, we tried to evaluate the current state
of the art on our sparse reference map. How-
ever, none of LiLoc (Fang et al., 2024), BM-
Loc (Feng et al., 2024), HDL localization (Koide
et al., 2019), DLL (Caballero and Merino,
2021), FAST LIO LOCALIZATION
7
, and li-
dar localization ros2
8
was able to finish KITTI Seq.
00, leaving us without any results to compare.
4.3 Local Consistency Evaluation
For quantitative evaluation of map consistency, we
use the Mean Map Entropy (MME) metric (Razlaw
et al., 2015). Specifically, we compare the MME
between the point cloud map generated by OpenL-
iDARMap and the map generated from the ground
truth transformations of the individual scans.
To facilitate this comparison, we preprocess the
point clouds by cropping them to a 100×100 m re-
gion and downsampling individual clouds to a voxel
size of 0.25 m. Notably, the composite map remains
unfiltered to avoid introducing bias into the evalua-
tion. This preprocessing step is essential to manage
the computational complexity caused by the size of
the maps.
In the case of the KITTI dataset, we can also use
the MME to show that the ground truth is not exact.
Our map shows a better (lower) score compared to the
ground truth (Table 4). The same can also be shown
for the NCLT results, where our approach reaches a
7
https://github.com/HViktorTsoi/fast lio localization
8
https://github.com/rsasaki0109/lidar localization ros2
lower score than the map generated from the ground
truth data. For the EDGAR dataset, the MME gener-
ated with the ground truth is lower than the results of
our approach.
4.4 Out-of-Date Reference Maps
Finally, we demonstrate that our method does not rely
on up-to-date reference maps. Across all datasets,
we show that neither current map data nor temporal
alignment between the maps and the LiDAR frames
is necessary. For instance, the surface data used
in the KITTI dataset originates from 2000 to 2023,
while the building data stems from 2023, and the
evaluated dataset was collected in 2011. Similarly,
the NCLT dataset’s data sources span from 2013 to
2024, whereas the EDGAR dataset spans from 2023
to 2024.
The accompanying Figure 8 and Figure 9 high-
light discrepancies between the sparse maps and the
datasets, such as missing buildings or structural dif-
ferences. These variations emphasize the minimal re-
quirements for input data in our approach. For in-
stance, building outlines for the NCLT dataset were
extracted from OSM data, whereas those for KITTI
and EDGAR were derived from spatial building mod-
els. Moreover, the resolution and type of input
data vary significantly: KITTI and NCLT datasets
rely on 1 m-resolution GeoTIFFs, while the EDGAR
dataset benefits from raw LiDAR point clouds ob-
tained through aerial scans. This diversity highlights
the adaptability of our method to sparse maps with
significantly different compositions.
As a final note, our approach focuses on mapping,
making runtime not a concern for us. Despite that, we
are able to run the entire pipeline in about 30 ms per
KITTI frame on a modern PC with an AMD Ryzen
7700.
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
185
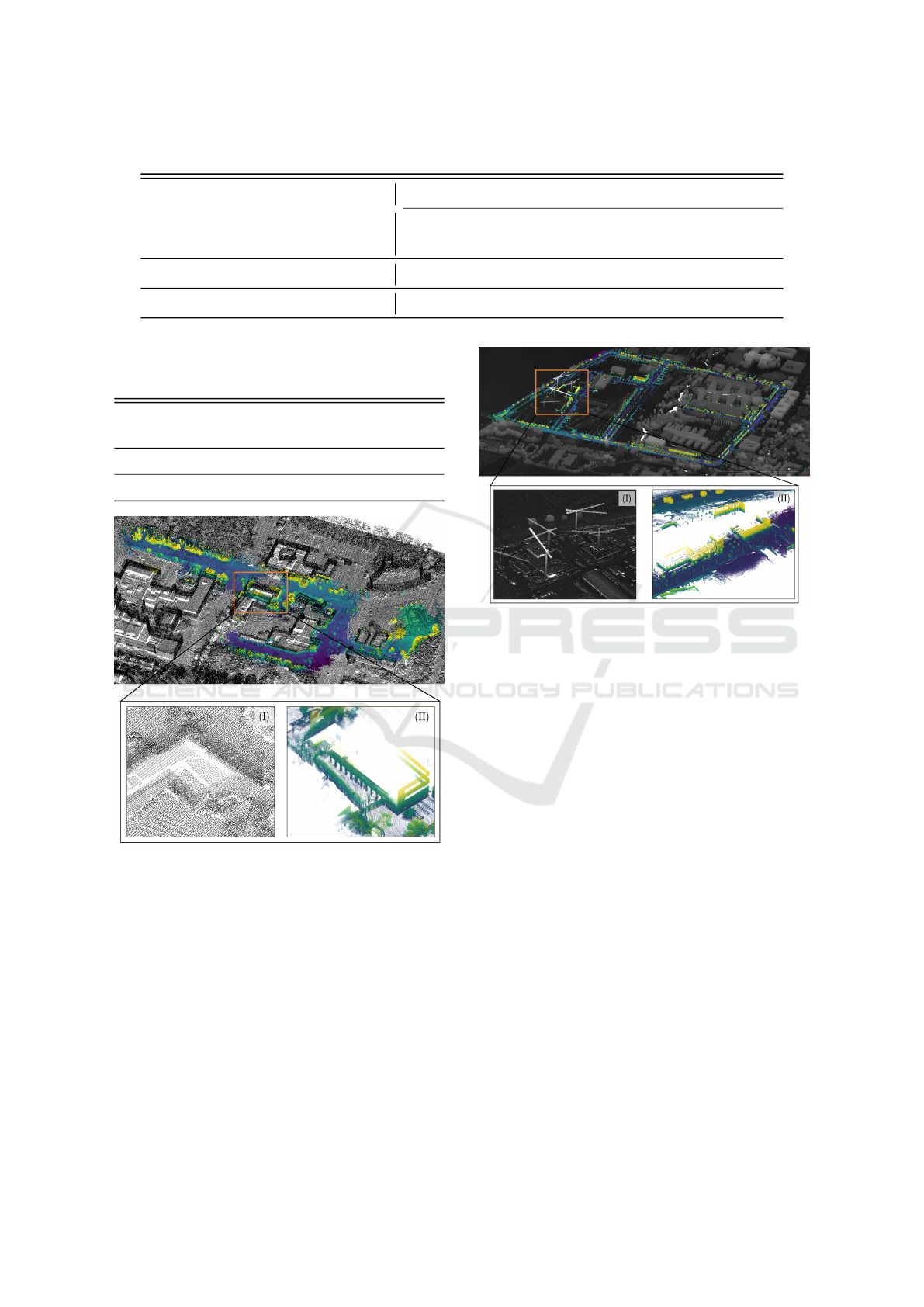
Table 3: Relative Trajectory Error (RTE) using the KITTI methodology for the evaluated datasets.
Method Reference
KITTI Seq. 00 NCLT 2013-01-1 EDGAR Campus
trans. ↓
[%]
rot. ↓
[deg/m]
trans. ↓
[%]
rot. ↓
[deg/m]
trans. ↓
[%]
rot. ↓
[deg/m]
KISS-ICP (Vizzo et al., 2023) 0.51 0.0017 2.31 0.0161 2.77 0.0095
OpenLiDARMap (ours) 0.53 0.0025 1.93 0.0116 1.44 0.0046
Table 4: Mean Map Entropy for the frames transformed
with the ground truth data and OpenLiDARMap results.
Lower ↓ is better.
Method
KITTI
Seq. 00
NCLT
2013-01-1
EDGAR
Campus
Ground Truth -6.293 -6.212 -6.317
OpenLiDARMap (ours) -6.448 -6.339 -6.231
Figure 8: Overload of the sparse reference map and the final
point cloud map created with our approach for the NCLT
2013-01-1 dataset. (I) shows part of the reference map, and
(II) shows the point cloud map generated with our approach
for an indoor section of the dataset that we were able to map
despite the missing correspondences between the onboard
LiDAR frames and the reference map.
5 LIMITATIONS AND
FUTURE WORK
Unlike the ATE analysis, where our approach showed
clear improvements, the RTE analysis yielded less
conclusive results. This result can be primarily at-
Figure 9: Overload of the sparse reference map and the final
point cloud map created with our approach for the EDGAR
Campus dataset. Highlighted is a part of the map that still
shows (I) the start of construction with multiple cranes in
the reference map, while (II) the generated map from the
LiDAR frames shows the completed building facades.
tributed to rotational errors, which have a particu-
larly strong impact on the KITTI metric. Future work
could address this limitation by improving the initial
estimation, such as using homogeneous transforms or
incorporating the time differences between frames, as
well as using Lie Algebra in the optimization to better
account for small displacements.
A key requirement for the functionality of our ap-
proach is the availability of a digital surface model.
While such data is available for large parts of the
world, it is not universally accessible. A notable ex-
ample is South Korea, where the lack of digital sur-
face models prevents us from evaluating our approach
on widely used datasets such as MulRan (Kim et al.,
2020) or HeLiPR (Jung et al., 2024).
Due to the simple ICP-based scan-to-scan match-
ing strategy, our method is limited in handling un-
mapped regions, such as long tunnels or extensive
indoor areas. However, the modular design of our
approach allows for future integration of more ad-
vanced LiDAR Odometry algorithms to address these
challenges. Additionally, significant environmental
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
186

changes can lead to erroneous results, emphasizing
the need for further investigations across diverse sce-
narios to evaluate robustness under varying condi-
tions.
6 CONCLUSIONS
In this paper, we presented an approach for geo-
referenced point cloud mapping that operates with-
out the need for GNSS. By combining a scan-to-
map and scan-to-scan point cloud registration method
within an optimization framework, we achieved accu-
rate mapping across diverse environments, vehicles,
and LiDAR setups. Our experiments suggest that
the proposed method effectively eliminates drift over
long distances and is robust to variations in environ-
mental conditions and sensor configurations. Our ex-
periments suggest that the proposed method enables
accurate georeferenced point cloud mapping without
relying on GNSS sensors.
ACKNOWLEDGEMENTS
As the first author, Dominik Kulmer initiated and de-
signed the paper’s structure. He is the main contrib-
utor to the design and implementation of the overall
concept. Maximilian Leitenstern, Marcel Weinmann,
and Markus Lienkamp revised the paper critically
for important intellectual content. Markus Lienkamp
gives final approval for the version to be published
and agrees to all aspects of the work. As a guaran-
tor, he accepts responsibility for the overall integrity
of the paper.
The research was partially funded by the Bavar-
ian Research Foundation (BFS) and through basic re-
search funds from the Institute of Automotive Tech-
nology (FTM).
REFERENCES
Agarwal, S. and Mierle, K. (2023). Ceres solver.
https://github.com/ceres-solver/ceres-solver.
Bai, C., Xiao, T., Chen, Y., Wang, H., Zhang, F., and Gao,
X. (2022). Faster-lio: Lightweight tightly coupled
lidar-inertial odometry using parallel sparse incremen-
tal voxels. IEEE Robotics and Automation Letters,
7:4861–4868.
Ballardini, A. L., Fontana, S., Cattaneo, D., Matteucci, M.,
and Sorrenti, D. G. (2021). Vehicle localization using
3d building models and point cloud matching. Sen-
sors, 21:5356.
Caballero, F. and Merino, L. (2021). Dll: Direct lidar
localization. a map-based localization approach for
aerial robots. In 2021 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
5491–5498. IEEE.
Carlevaris-Bianco, N., Ushani, A. K., and Eustice, R. M.
(2016). University of michigan north campus long-
term vision and lidar dataset. The International Jour-
nal of Robotics Research, 35:1023–1035.
Cho, Y., Kim, G., Lee, S., and Ryu, J.-H. (2022).
Openstreetmap-based lidar global localization in ur-
ban environment without a prior lidar map. IEEE
Robotics and Automation Letters, 7:4999–5006.
Cramariuc, A., Bernreiter, L., Tschopp, F., Fehr, M., Rei-
jgwart, V., Nieto, J., Siegwart, R., and Cadena, C.
(2023). maplab 2.0 – a modular and multi-modal map-
ping framework. IEEE Robotics and Automation Let-
ters, 8:520–527.
Dellaert, F. (2022). borglab/gtsam.
https://github.com/borglab/gtsam, 10.5281/zen-
odo.5794541.
Dellenbach, P., Deschaud, J.-E., Jacquet, B., and Goulette,
F. (2022). Ct-icp: Real-time elastic lidar odometry
with loop closure. In 2022 International Conference
on Robotics and Automation (ICRA), pages 5580–
5586. IEEE.
Deschaud, J.-E. (2018). Imls-slam: Scan-to-model match-
ing based on 3d data. In 2018 IEEE International
Conference on Robotics and Automation (ICRA),
pages 2480–2485. IEEE.
Elhousni, M., Zhang, Z., and Huang, X. (2022). Lidar-osm-
based vehicle localization in gps-denied environments
by using constrained particle filter. Sensors, 22:5206.
Fang, Y., Li, Y., Qian, K., Tombari, F., Wang, Y., and Lee,
G. H. (2024). Liloc: Lifelong localization using adap-
tive submap joining and egocentric factor graph.
Feng, Y., Jiang, Z., Shi, Y., Feng, Y., Chen, X., Zhao,
H., and Zhou, G. (2024). Block-map-based localiza-
tion in large-scale environment. In 2024 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1709–1715. IEEE.
Floros, G., van der Zander, B., and Leibe, B. (2013). Open-
streetslam: Global vehicle localization using open-
streetmaps. In 2013 IEEE International Confer-
ence on Robotics and Automation, pages 1054–1059.
IEEE.
Frosi, M., Gobbi, V., and Matteucci, M. (2023). Osm-slam:
Aiding slam with openstreetmaps priors. Frontiers in
Robotics and AI, 10.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Interna-
tional Journal of Robotics Research, 32:1231–1237.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 3354–3361. IEEE.
Jeong, J., Yoon, J. Y., Lee, H., Darweesh, H., and Sung,
W. (2022). Tutorial on high-definition map generation
for automated driving in urban environments. Sensors,
22:7056.
OpenLiDARMap: Zero-Drift Point Cloud Mapping Using Map Priors
187

Jung, M., Yang, W., Lee, D., Gil, H., Kim, G., and Kim, A.
(2024). Helipr: Heterogeneous lidar dataset for inter-
lidar place recognition under spatiotemporal varia-
tions. The International Journal of Robotics Research,
43:1867–1883.
Karle, P., Betz, T., Bosk, M., Fent, F., Gehrke, N.,
Geisslinger, M., Gressenbuch, L., Hafemann, P., Hu-
ber, S., H
¨
ubner, M., Huch, S., Kaljavesi, G., Kerbl,
T., Kulmer, D., Maierhofer, S., Mascetta, T., Pfab,
F., Rezabek, F., Rivera, E., Sagmeister, S., Seidlitz,
L., Sauerbeck, F., Tahiraj, I., Trauth, R., Uhlemann,
N., W
¨
ursching, G., Zarrouki, B., Althoff, M., Betz,
J., Bengler, K., Carle, G., Diermeyer, F., Ott, J., and
Lienkamp, M. (2023). Edgar: An autonomous driv-
ing research platform – from feature development to
real-world application.
Kim, G., Park, Y. S., Cho, Y., Jeong, J., and Kim, A.
(2020). Mulran: Multimodal range dataset for urban
place recognition. In 2020 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
6246–6253. IEEE.
Koide, K. (2024). small gicp: Efficient and parallel algo-
rithms for point cloud registration. Journal of Open
Source Software, 9:6948.
Koide, K., Miura, J., and Menegatti, E. (2019). A portable
three-dimensional lidar-based system for long-term
and wide-area people behavior measurement. Inter-
national Journal of Advanced Robotic Systems, 16.
Koide, K., Oishi, S., Yokozuka, M., and Banno, A. (2024a).
Tightly coupled range inertial localization on a 3d
prior map based on sliding window factor graph opti-
mization. In 2024 IEEE International Conference on
Robotics and Automation (ICRA), pages 1745–1751.
IEEE.
Koide, K., Yokozuka, M., Oishi, S., and Banno, A. (2024b).
Glim: 3d range-inertial localization and mapping with
gpu-accelerated scan matching factors. Robotics and
Autonomous Systems, 179:104750.
Kulmer, D., Tahiraj, I., Chumak, A., and Lienkamp, M.
(2024). Multi-lica: A motion- and targetless multi
- lidar-to-lidar calibration framework. In 2024 IEEE
International Conference on Multisensor Fusion and
Integration for Intelligent Systems (MFI), pages 1–7.
IEEE.
Leitenstern, M., Sauerbeck, F., Kulmer, D., and Betz, J.
(2024). Flexmap fusion: Georeferencing and auto-
mated conflation of hd maps with openstreetmap.
Miller, I. D., Cowley, A., Konkimalla, R., Shivakumar,
S. S., Nguyen, T., Smith, T., Taylor, C. J., and Ku-
mar, V. (2021). Any way you look at it: Semantic
crossview localization and mapping with lidar. IEEE
Robotics and Automation Letters, 6:2397–2404.
Pan, Y., Zhong, X., Wiesmann, L., Posewsky, T., Behley,
J., and Stachniss, C. (2024). Pin-slam: Lidar slam
using a point-based implicit neural representation for
achieving global map consistency. IEEE Transactions
on Robotics, 40:4045–4064.
Razlaw, J., Droeschel, D., Holz, D., and Behnke, S. (2015).
Evaluation of registration methods for sparse 3d laser
scans. In 2015 European Conference on Mobile
Robots (ECMR), pages 1–7. IEEE.
Suger, B. and Burgard, W. (2017). Global outer-urban
navigation with openstreetmap. In 2017 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1417–1422. IEEE.
Vizzo, I., Guadagnino, T., Mersch, B., Wiesmann, L.,
Behley, J., and Stachniss, C. (2023). Kiss-icp: In de-
fense of point-to-point icp – simple, accurate, and ro-
bust registration if done the right way. IEEE Robotics
and Automation Letters, 8:1029–1036.
Xia, Z., Shi, Y., Li, H., and Kooij, J. F. P. (2024). Adapting
Fine-Grained Cross-View Localization to Areas With-
out Fine Ground Truth, pages 397–415.
Xu, W., Cai, Y., He, D., Lin, J., and Zhang, F. (2022). Fast-
lio2: Fast direct lidar-inertial odometry. IEEE Trans-
actions on Robotics, 38:2053–2073.
Yan, F., Vysotska, O., and Stachniss, C. (2019). Global lo-
calization on openstreetmap using 4-bit semantic de-
scriptors. In 2019 European Conference on Mobile
Robots (ECMR), pages 1–7. IEEE.
Yang, S., Jiang, R., Wang, H., and Ge, S. S. (2017).
Road constrained monocular visual localization using
gaussian-gaussian cloud model. IEEE Transactions
on Intelligent Transportation Systems, 18:3449–3456.
Yifan, D., Zhang, X., Li, Y., You, G., Chu, X., Ji, J., and
Zhang, Y. (2024). Cellmap: Enhancing lidar slam
through elastic and lightweight spherical map repre-
sentation.
Zheng, X. and Zhu, J. (2024a). Traj-lio: A resilient multi-
lidar multi-imu state estimator through sparse gaus-
sian process.
Zheng, X. and Zhu, J. (2024b). Traj-lo: In defense of
lidar-only odometry using an effective continuous-
time trajectory. IEEE Robotics and Automation Let-
ters, 9:1961–1968.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
188
