
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with
Machine Learning and Infrastructure as Code
Denis B. Citadin
1
, F
´
abio Diniz Rossi
2
, Marcelo C. Luizelli
3
, Philippe O. A. Navaux
1
and
Arthur F. Lorenzon
1
1
Institute of Informatics, Federal University of Rio Grande do Sul, Brazil
2
Campus Alegrete, Federal Institute Farroupilha, Brazil
3
Campus Alegrete, Federal University of Pampa, Brazil
fl
Keywords:
Cloud Computing, Energy Efficiency, Infrastructure as Code, Artificial Intelligence.
Abstract:
Cloud computing has become essential for executing high-performance computing (HPC) workloads due to
its on-demand resource provisioning and customization advantages. However, energy efficiency challenges
persist, as performance gains from thread-level parallelism (TLP) often come with increased energy consump-
tion. To address the challenging task of optimizing the balance between performance and energy consumption,
we propose SmartNodeTuner. It is a framework that leverages artificial intelligence and Infrastructure as Code
(Iac) to optimize performance-energy trade-offs in cloud environments and provide seamless infrastructure
management. SmartNodeTuner is split into two main modules: a BuiltModel Engine leveraging an artifi-
cial neural network (ANN) model trained to predict optimal TLP and node configurations; and AutoDeploy
Engine using IaC with Terraform to automate the deployment and resource allocation, reducing manual ef-
forts and ensuring efficient infrastructure management. Using ten well-known parallel workloads, we validate
SmartNodeTuner on a private cloud cluster with diverse architectures. It achieves a 38.2% improvement in
the Energy-Delay Product (EDP) compared to Kubernetes’ default scheduler and consistently predicts near-
optimal configurations. Our results also demonstrate significant energy savings with negligible performance
degradation, highlighting SmartNodeTuner ’s effectiveness in optimizing resource use in heterogeneous cloud
environments.
1 INTRODUCTION
Cloud computing has been widely employed for ex-
ecuting parallel workloads across various domains,
such as machine learning and linear algebra, due
to its benefits of on-demand resource provisioning,
customization, and resource control (Navaux et al.,
2023). However, as these systems are usually het-
erogeneous and rely on energy-intensive data cen-
ters (Masanet et al., 2020), the challenge extends be-
yond performance optimization to include efficient re-
source utilization to reduce energy consumption and
operating costs (Masanet et al., 2020). Given the
characteristics of different applications, some work-
loads benefit more from running on nodes with fewer
cores. In contrast, others require robust, high-core-
count nodes for optimal performance and energy ef-
ficiency. For example, compute-bound applications
with high scalability can fully utilize the resources of
large-core nodes to maximize performance. On the
other hand, memory-bound or less scalable applica-
tions often perform more efficiently on smaller nodes
with lower core counts, as they minimize communi-
cation overhead and reduce contention for shared re-
sources (Lorenzon and Beck Filho, 2019).
Moreover, the thread scalability of parallel work-
loads can also be constrained by their inherent char-
acteristics. This means that running the work-
loads with the maximum number of cores available
in the node will not always deliver the best per-
formance and energy efficiency outcomes (Suleman
et al., 2008). Workloads with limited thread-level
parallelism (TLP), such as those with high inter-
thread communication or synchronization require-
ments, may not achieve significant performance gains
even on nodes with a high number of cores. In these
cases, increasing the number of threads can lead to
diminishing returns, where the overhead of synchro-
nization and resource contention offsets the bene-
fits of parallel execution. Consequently, determin-
Citadin, D. B., Rossi, F. D., Luizelli, M. C., Navaux, P. O. A. and Lorenzon, A. F.
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code.
DOI: 10.5220/0013418500003950
In Proceedings of the 15th International Conference on Cloud Computing and Services Science (CLOSER 2025), pages 49-60
ISBN: 978-989-758-747-4; ISSN: 2184-5042
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
49

ing the ideal TLP degree and selecting the appropriate
node for execution is essential to effectively balancing
performance and energy efficiency in heterogeneous
cloud environments.
To alleviate the burden on software developers and
end-users in defining these execution parameters, In-
frastructure as Code (IaC) offers an effective solution.
IaC enables resource provisioning and configuration
automation by expressing infrastructure requirements
as code. This approach allows developers to define
the desired infrastructure state —- such as node selec-
tion and thread allocation—in a declarative manner,
leaving the deployment and setup to IaC tools. For
instance, workloads that scale effectively with higher
thread counts can be automatically deployed on nodes
with a large number of cores using IaC scripts. Con-
versely, workloads with limited scalability can be al-
located to nodes with fewer cores, optimizing both
performance and energy consumption.
Given the complexities in identifying the best
combinations of computing nodes and TLP for exe-
cuting parallel workloads in cloud heterogeneous en-
vironments, this paper makes three key contributions.
(i) a BuildModel engine that employs an artificial neu-
ral network (ANN) based model to determine the
combination that delivers the best balance between
performance and energy consumption for each paral-
lel workload. The ANN model is trained on a dataset
containing representative hardware and software met-
rics from workloads with distinct computational and
memory access characteristics. (ii) AutoDeploy en-
gine, which relies on IaC to automate the deployment
of workloads using the combinations predicted by the
predictor engine across varied cloud resources. For
that, we rely on the Terraform tool to simplify node
configuration and management, reducing the need for
manual intervention while providing control over how
resources are distributed. And, (iii) SmartNodeTuner,
a framework that integrates both engines to automate
the selection of the most suitable computing node and
TLP degree for running parallel workloads on cloud
environments.
To validate SmartNodeTuner, we conducted ex-
periments with ten well-established applications
spanning various domains, all deployed on a private
cluster featuring nodes with different architectural
characteristics. Throughout our validation, SmartN-
odeTuner improved the Energy-Delay Product (EDP)
by 38.2% compared to Kube-Scheduler, the default
scheduler in Kubernetes. Additionally, compared
with an exhaustive search method that considers every
possible node and thread configuration for each ap-
plication, SmartNodeTuner predicted configurations
that fell within the top two optimal solutions in over
80% of instances. Furthermore, we also show that
SmartNodeTuner provides significant energy savings
while having minimal impact on the workloads’ per-
formance.
2 BACKGROUND
2.1 Cloud Computing
Cloud computing has become the standard for ap-
plication deployment due to its on-demand resource
availability over the Internet (Liu et al., 2012). While
resource provisioning appears seamless to users, var-
ious technologies work in the background to ensure
essential features like elasticity and high availabil-
ity (M
´
arquez et al., 2018). Initially, cloud systems
struggled to meet the demands of compute-intensive
applications needing rapid response times, such as
Big Data and Analytics, due to virtualization over-
head (Barham et al., 2003). This led to the adoption
of lightweight container technologies like Docker,
which closely approaches the performance of non-
virtualized systems. Docker has become the preferred
platform for developing, packaging, and running con-
tainerized applications, encapsulating all necessary
components like libraries and binaries for streamlined
execution. Docker is particularly useful for deploy-
ing parallel applications, as it creates isolated envi-
ronments with all required dependencies while mini-
mizing the overhead typical of traditional virtualiza-
tion. This efficiency makes Docker ideal for resource-
demanding HPC applications, enabling parallel appli-
cations to scale effectively across multiple nodes and
maximizing cloud-based HPC infrastructure use.
2.2 Infrastructure as Code - IaC
Infrastructure as Code (IaC) is an approach that en-
ables software developers and administrators to man-
age hardware resources in a data center using code
instead of a manual process. It can automate the en-
tire lifecycle of workloads running on data centers, in-
cluding provisioning, deployment, and management.
Different tools can be used to automate deployment,
including Terraform, Pulumi, AWS CloudFormation,
and Puppet. Due to its broad compatibility with cloud
providers, we employ Terraform as our IaC in this
work. Terraform employs the HashiCorp Configu-
ration Language (HCL), similar to JSON but adding
elements like variable declarations, loops, and condi-
tionals.
The core functionality of Terraform is split into
three main steps after the Terraform configuration is
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
50

Algorithm 1: Terraform Child Module Configuration.
Example of a Child Module configuration. Note that there are optional and
some required variables.
1: module ”app deploy” {
source = "./module/kubernetes job" # Required
app path = "./my/path/toapp" # Required
cpu limit = 2 # Required
build command = "my build command" # Optional
run command = "my run command" # Optional
workdir = "/usr/src/app" # Optional
custom image = "my-custom-image" # Optional
kubeconfig path = "my-kubeconfig-path" # Optional
2: }
written, as discussed next. (i) Init, which initializes
the working directory, sets up the environment and
prepares Terraform for operation; (ii) Plan, which
creates an execution plan to let the users preview the
changes that Terraform plans to make to the infras-
tructure; and (iii) Apply, where the actions proposed
in the Terraform plan are executed. Also, in the end,
the Destroy is responsible for destroying all remote
objects managed by a particular Terraform configura-
tion.
Terraform uses modules to manage infrastructures
that scale effectively in terms of resources. A Ter-
raform module is a collection of standard configura-
tion files stored in a dedicated directory. These mod-
ules group together resources that serve a specific pur-
pose, which helps reduce the amount of code devel-
opers need to write for similar infrastructure compo-
nents. There are two types of modules in Terraform:
root and child. The root module manages the over-
all setup, resources, and global settings. Child mod-
ules are reusable components used by the root or other
child modules. When commands like init, plan, or
apply are run, Terraform starts with the root mod-
ule, loading its configurations and dependencies be-
fore moving to the child modules. Each child module
includes specific resources like setting up a database,
load balancer, or virtual network. An example of
child module configuration is depicted in Algorithm
1, where the module is named ”app deploy. Within
it, the configurations that must be used when deploy-
ing the workload for execution are defined, including
the source for the module Kubernetes, the path for the
workload (app path), the limit of CPUs (cpu limit)
and optional commands needed by the workload.
2.3 Scalability of Parallel Workloads
Many studies indicate that maximizing available
cores and cache does not guarantee optimal perfor-
mance or energy efficiency for specific parallel work-
loads due to inherent hardware and software limi-
tations (Suleman et al., 2008) (Subramanian et al.,
2013). Workloads requiring frequent main memory
access for private data encounter scalability issues as
off-chip bus saturation limits performance (Suleman
et al., 2008). While increased threads intensify bus
demand, bandwidth is restricted by fixed I/O pin con-
straints (Ham et al., 2013), preventing proportional
scaling and leading to elevated energy use without
corresponding performance gains.
For shared data workloads, shared memory access
frequency becomes critical as threads increase, im-
pacting performance and energy. Inter-thread com-
munication typically accesses distant memory re-
gions, such as last-level caches or main memory,
which incur greater latency and power consumption
than private caches, introducing bottlenecks in execu-
tion (Subramanian et al., 2013). In synchronization,
accessing shared variables requires sequential access
to prevent race conditions, causing serialization that
increases execution time and energy consumption
within these critical sections (Suleman et al., 2008).
2.4 Related Work
Infrastructure as Code has gained attention in recent
years due to its ability to automate the provisioning
and management of infrastructure through code. San-
dobalin et al., (Sandobalin et al., 2017) developed
an infrastructure modeling tool for cloud provision-
ing to decrease the workload for development and
operations teams. Borovits et al., (Borovits et al.,
2020) propose DeepIaC, a deep learning-based ap-
proach for detecting linguistic anti-patterns in IaC
through word embeddings and abstract syntax tree
analysis. Vuppalapati et al., (Vuppalapati et al., 2020)
discuss the automation of Tiny ML Intelligent Sen-
sors DevOps using Microsoft Azure. Sandobal
´
ın et
al., 2020 (Sandobal
´
ın et al., 2020) compare a model-
driven tool (Argon) with a code-centric tool (Ansi-
ble) to evaluate their effectiveness in defining cloud
infrastructure. Similarly, Palma et al., (Palma et al.,
2020) propose a catalog of software quality metrics
for IaC. Kumara et al., (Kumara et al., 2020) present
a knowledge-driven approach for semantic detecting
smells in cloud infrastructure code. Lepiller et al.,
(Lepiller et al., 2021) analyze IaC to prevent intra-
update sniping vulnerabilities, showcasing the impor-
tance of leveraging tools for infrastructure configu-
ration management. Saavedra et al., (Saavedra and
Ferreira, 2022) introduce GLITCH, an automated ap-
proach for polyglot security smell detection in IaC.
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code
51

2.4.1 Our Contributions
Based on the works discussed above, this paper makes
the following contributions: (i) Unlike strategies that
focus solely on optimizing the execution of parallel
applications on a single-node machine by adjusting
the TLP degree and other parameters (e.g., DVFS),
our approach, SmartNodeTuner, offers a comprehen-
sive solution. It not only identifies the best node to
run the workload but also considers the optimal TLP
degree for executing parallel workloads. Compared
to existing solutions that leverage IaC to automate the
setup of HPC environments, our strategy simplifies
the end user or system administrator process by seam-
lessly and simultaneously addressing both the ideal
node and TLP degree necessary for efficient workload
execution.
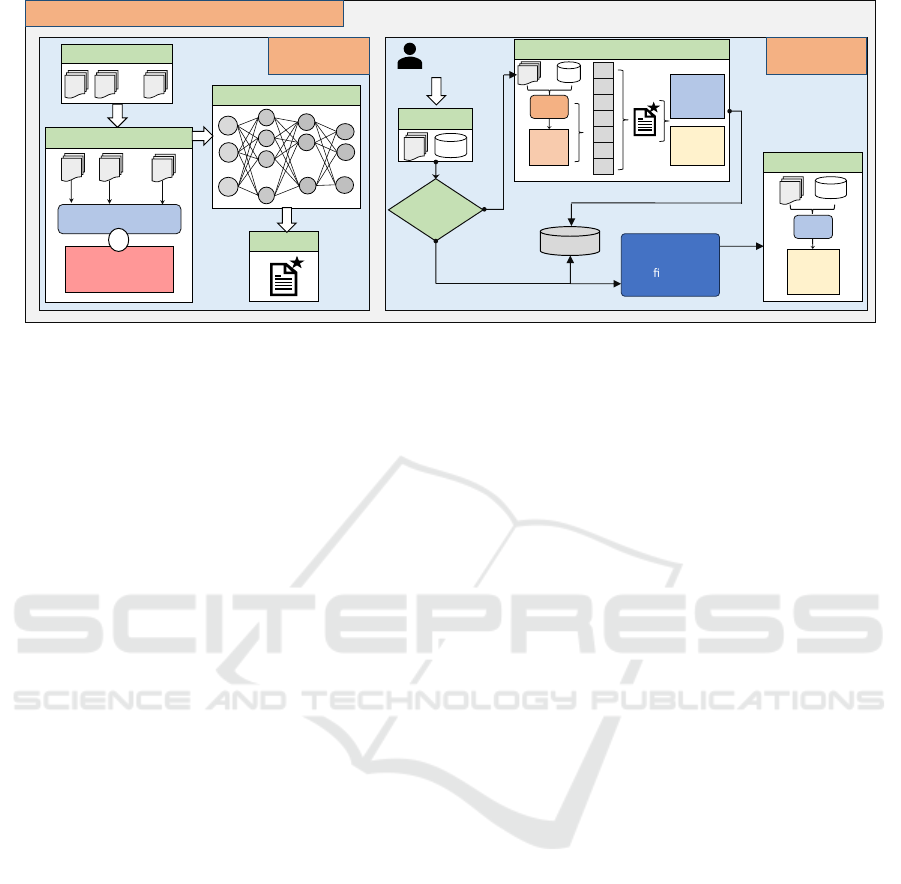
3 SmartNodeTuner
In this section, we present SmartNodeTuner, our pro-
posed approach. The primary objective of SmartN-
odeTuner is to optimize the balance between perfor-
mance and energy consumption, as measured by the
Energy-Delay Product (EDP) metric. This optimiza-
tion applies to homogeneous and heterogeneous cloud
environments while executing parallel workloads. To
do that, SmartNodeTuner is divided into two main en-
gines: BuildModel and AutoDeploy, as illustrated in
Fig. 1. The BuildModel is responsible for training an
ANN model and building a predictor, as discussed in
Section 3.1. On the other hand, the AutoDeploy en-
gine is responsible for automatically deploying work-
loads on cloud infrastructures using the built predictor
and IaC, as described in Section 3.2
3.1 BuildModel Engine
To train and build the predictor that will be used by the
AutoDeploy engine, the BuildModel is divided into
two main steps: feature extraction and model genera-
tion, as illustrated in Fig. 1 and discussed next.
3.1.1 Extracting Features for the ANN Model
Given the training set composed of workload binaries
provided by the user to train the ANN model (
1
), the
first step of this engine is to collect the hardware and
software metrics that will be used to train the ANN
model. Then, SmartNodeTuner packages these work-
loads in Docker images before deploying them to ex-
ecute across different architectures. During the DSE,
1
Available at omitted due to double-blind policy
each worker node runs each workload with the num-
ber of threads ranging from 1 to the number of avail-
able hardware threads. SmartNodeTuner does not
employ thread oversubscription since it has demon-
strated no performance and energy improvements in
parallel workloads (Huang et al., 2021).
During execution, metrics for each combination
of workload, worker node, and thread count are col-
lected: CPU Utilization: Ranges from 0 to 1, measur-
ing how effectively the threads use the cores. Values
near 1.0 with maximum threads indicate good scal-
ability; values near 0.0 suggest poor scalability. In-
structions Per Cycle (IPC): Indicates the number of
instructions executed per clock cycle. Cache Mem-
ory Hit/Miss Rate: Assesses data access efficiency
in cache memory. These metrics determine if a work-
load is CPU- or memory-intensive. For example, a
high cache miss rate and low CPU utilization may in-
dicate that inter-thread communication hampers scal-
ability. Additionally, SmartNodeTuner collects per-
formance metrics such as execution time (in seconds),
energy consumption (in joules), and calculates the
EDP to determine the optimal worker node and thread
count for each workload. Tools like AMDuProf for
AMD processors and Intel VTune for Intel archi-
tectures collect these metrics directly from hardware
counters.
At the end of this phase, SmartNodeTuner stores
all collected data in its internal dataset, which in-
cludes: workload description, worker node identi-
fier, number of threads used, extracted features, and
optimal configuration. To ensure data integrity and
prevent issues like overfitting or underfitting in the
machine learning model, SmartNodeTuner applies
Discretization and Min-Max Normalization to the
dataset. Discretization converts categorical data into
numerical values, and normalization scales all metric
values to a standard range between 0 and 1, maintain-
ing consistency across the dataset.
3.1.2 Generating the ANN Predictor Model
After preparing the dataset in the initial step, it is used
to train the ANN predictor model. The ANN’s in-
put layer is designed to accept specific parameters, in-
cluding the Workload ID, Worker Node, TLP degree,
CPU utilization statistics, IPC, and Cache memory
hit-and-miss rates. To maximize the ANN model’s
performance, SmartNodeTuner focuses on fine-tuning
several critical hyperparameters. These include the
number of hidden layers in the network, the number
of neurons within each layer, the choice of activation
function, the learning rate, the momentum parameter,
and the total number of training epochs. To find the
optimal hyperparameter value, SmartNodeTuner em-
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
52
Training Set
W
1
W
2
W
p
...
W
1
W
p
...
...
...
...
O
0
O
1
O
n
Feature Extraction
Model Generation
Predictor
f
0
f
1
f
F-1
W
2
Working Nodes
#Threads from 1 to
#Cores
...
X
BuildModel
Engine
AutoDeploy
Engine
User
defines
Input
W
Feature Extraction and Inference
Deployment
IS
W
IS
IS
f
0
f
1
f
2
f
3
f
4
...
f
F-1
Pred.
Worker
node
Pred. nº
threads
W
Already
predicted
?
Yes
No
DB
read(app)
write(app,WN,BT)
Max nº
threads
WN
Ideal nº
threads
WN
IaC
con guraon
SmartNodeTuner
Figure 1: Workflow of each Engine used by SmartNodeTuner.
ploys KerasTuner, which automates the exploration
of the parameter space, identifying the most effective
combination of hyperparameters.
After determining the optimal hyperparameters,
the ANN model is trained using the provided dataset
and divided into training and testing subsets. To
ensure robustness and generalizability of the model,
we employ Stratified k-Fold cross-validation during
the evaluation phase. This technique is suitable for
datasets with class imbalance, as it preserves the pro-
portion of classes in each fold. The dataset is then
partitioned into k stratified folds; in each iteration,
one fold serves as the validation set while the remain-
ing k-1 folds constitute the training set. SmartNode-
Tuner performs 20 iterations of this cross-validation
process. Ultimately, the predictor model is selected
based on the highest accuracy across all iterations.
3.2 AutoDeploy Engine
Given the predictor model built in the last step (which
is only performed once), the AutoDeploy engine is re-
sponsible for managing the workload execution on the
environment, as shown in Fig. 1. For that, it predicts
ideal combinations of worker node and TLP degree
and then uses these values to launch the workload via
IaC transparently.
3.2.1 Predicting Ideal Combinations
The execution phase begins when the user provides
the workload binary and input set encapsulated into
a container for execution in the cluster environment.
This input prompts SmartNodeTuner to utilize the
trained ANN model to generate recommendations to
optimize the EDP. It is worth mentioning that al-
though SmartNodeTuner is configured to optimize the
EDP of applications, it can be modified to optimize
the workload for other metrics like performance or
energy. Then, SmartNodeTuner checks its internal
database to determine whether the workload has been
previously executed by comparing the hash informa-
tion. When it is the first time the workload is executed
on the system, SmartNodeTuner performs the follow-
ing operations. (i) The container is configured to run
on any available worker node with the TLP degree
equal to the hardware threads available. (i) During
execution, SmartNodeTuner collects the same hard-
ware and software metrics as the Build-Model En-
gine. (iii) The collected metrics are pre-processed
using discretization and normalization techniques to
prepare the data for input into the predictor model.
(iv) The pre-processed data is fed into the predic-
tor model, which predicts an ideal worker node and
thread count. (v) The predicted configuration is then
stored in the database and associated with the work-
load details to facilitate quick retrieval in future exe-
cutions. On the other hand, if the workload has been
executed and predicted before, SmartNodeTuner re-
trieves the stored predicted configurations from the
database and moves to the IaC configuration.
3.2.2 Automating Workload Deployment via IaC
In this stage, the IaC configuration module orches-
trates the deployment of containers with workloads
according to the ideal node and TLP degree combi-
nation determined in the previous stage. This config-
uration operates within a Kubernetes v.1.30 cluster,
while the module was implemented using Terraform
v1.9.0, leveraging IaC to automate resource allocation
processes.
The deployment begins with SmartNodeTuner us-
ing specific Terraform data source blocks to request
the Kubernetes API via the official provider for node
availability and assess the following resource metrics
across the Kubernetes cluster: available CPU cores
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code
53

and memory capacity from each worker node to con-
firm that nodes meet the necessary workload require-
ments. With this information, SmartNodeTuner at-
tempts to allocate the workload on the previously rec-
ommended node. If this node is unavailable, the mod-
ule automatically examines other nodes in the cluster
to find the next best match, considering the proxim-
ity of the number of CPUs to the ideal TLP degree
predicted by the ANN model.
Deployment specifications are abstracted from the
user side, as they are automatically populated by the
information populated in the Child Module declared
in Terraform, including the worker node ID, the con-
tainer path for the workload binary, and the number
of CPU cores to be allocated. SmartNodeTuner con-
figures this file with Kubernetes-specific API direc-
tives such as cpuRequests and cpuLimits within the
pod specifications; the job is then applied to the clus-
ter by defining the Terraform kubernetes job resource
in the root module, which triggers the Kubernetes API
to instantiate the container based on the specifications
provided. Thanks to the automated configurations of
the IaC module, the user will not need to deal with
Kubernetes .yaml files or manual commands via the
command line. The module itself will be in charge
of taking the application to the target node and de-
ploying it with the correct configurations. Although in
this work, SmartNodeTuner was developed and con-
figured to operate with a Kubernetes cluster, the IaC
configuration module’s design is extendable to sup-
port other cloud environments, such as AWS Elastic
Kubernetes Service (EKS), Google Kubernetes En-
gine (GKE), and Microsoft Azure.
4 METHODOLOGY
4.1 Execution Environment
We conducted our experiments within a private cloud
environment featuring a variety of hardware configu-
rations. This setup included a master node responsi-
ble for distributing applications to worker nodes, as
well as three worker nodes, each with distinct pro-
cessing capabilities: WN16 – AMD Ryzen 7 2700,
with 16 HW threads and 32GB RAM; WN24 – AMD
Ryzen 2920X, with 24 HW threads and 96GB RAM;
and WN64 AMD Threadripper 3990X, with 64 HW
threads and 128GB RAM. Every node ran the De-
bian OS, Kubernetes version 1.30, and Docker ver-
sion 23.0. The applications were compiled using
GCC/G++ version 12.0 with the optimization flag -
O3.
4.2 Parallel Workloads
We employed a set of twenty-four workloads already
parallelized and written in C and C++. These work-
loads were categorized into training datasets and val-
idation datasets.
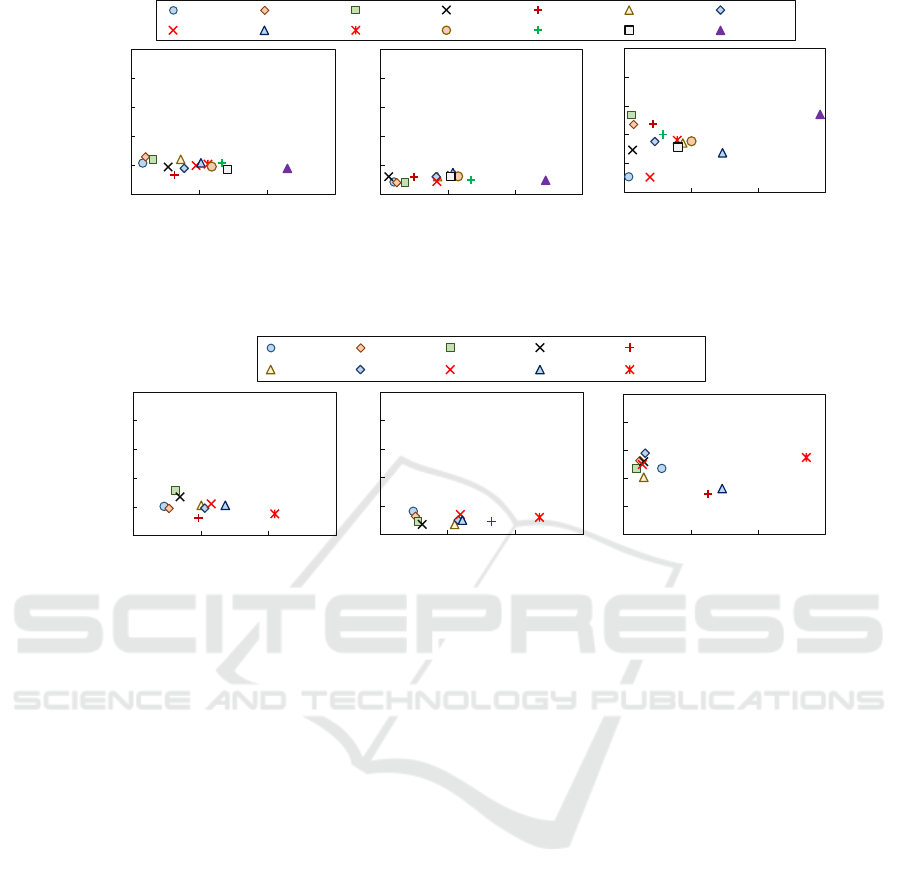
Training DataSet: For the training phase, we se-
lected fourteen workloads with different characteris-
tics of L3 cache miss ratio and average number of in-
structions per cycle (IPC), as shown in Fig. 2: Three
applications from the Rodinia Benchmark Suite (Che
et al., 2009): hotspot (HS), lower-upper decomposi-
tion (LUD), and streamcluster (SC). Five kernels and
pseudo-applications from the NAS Parallel Bench-
marks (Bailey et al., 1991): CG, FT, LU, SP, and
UA. Three applications from various other domains:
the Jacobi method (JA), the Poisson equation solver
(PO), and the STREAM benchmark (ST). Three ap-
plications from the Parboil Benchmark Suite (Stratton
et al., 2012): MRI, SPMV, and TPACF.
Validation DataSet: To validate SmartNodeTuner,
we selected ten applications that exhibit varying char-
acteristics in terms of CPU and memory usage, as de-
tailed in Fig. 3: Four from the Parboil Benchmark
suite: BFS, CUTCP, LBM, and SGEMM. Three from
the NAS Parallel Benchmark suite: BT, EP, and MG.
Three from other domains: FFT, HPCG, and NB. The
applications can also be categorized based on their de-
gree of parallelism, as measured using AMD uProf.
Low parallelism: limited scalability due to inherent
constraints in their computational structure or work-
load distribution, and include BFS, FFT, HPCG, NB,
and SGEMM. Medium parallelism: moderate scala-
bility, leveraging parallel resources more effectively
than low-parallelism workloads but not fully exploit-
ing the available threads. Examples are LBM and
MG-NAS. High parallelism: These applications effi-
ciently scale across multiple threads, fully utilizing
the parallel capabilities of the hardware. Examples
include BT-NAS and CUTCP.
We have chosen these applications because of
their diversity in computational and memory access
patterns, which mirror real-world parallel cloud work-
loads. The training dataset includes applications with
varied L3 cache miss ratios and IPC, such as those
from the Rodinia and NAS-PB suites, enabling the
evaluation of our proposed framework under different
hardware utilization scenarios. Similarly, the valida-
tion dataset includes applications with distinct CPU
and memory usage behaviors, ranging from compute-
bound tasks like LBM to memory-intensive applica-
tions like HPCG, ensuring comprehensive coverage
of cloud-specific challenges such as resource alloca-
tion and heterogeneity.
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
54
a) AMD-16 b) AMD-24 c) AMD-64
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
L3 Cache Misses
Average IPC
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
Average IPC
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
Average IPC
ST MRI JA TPACF CG-NAS UA-NAS SP-NAS
SC HS LU-NAS SPMV FT-NAS LUD PO
Figure 2: Behavior of each workload used to train the model employed by SmartNodeTuner.
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
L3 Cache Misses
Average IPC
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
Average IPC
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3
Average IPC
EP-NAS FFT HPCG MG-NAS SGEMM
BFS NB BT-NAS CUTCP LBM
a) AMD-16 b) AMD-24 c) AMD-64
Figure 3: Behavior of each workload used to validate SmartNodeTuner.
5 EXPERIMENTAL EVALUATION
In this section, we discuss the results of employing
SmartNodeTuner to execute parallel workloads on a
private heterogeneous cloud. To assess the effective-
ness of our approach, we compared its results against
distinct scenarios:
STD-WN16, STD-WN24, and STD-WN64:
each workload was executed on the respective worker
node with the number of threads that matches the
number of cores (e.g., 16, 24, and 64, respectively),
which is the standard practice employed to execute
parallel workloads. Best-WN16, Best-WN24, and
Best-WN64: In this scenario, we conducted a thor-
ough search to determine the optimal number of
threads that achieved the best EDP for each node.
Each configuration represents the execution of the
workload using the optimal number of threads on
each worker node. Random: a method where the
workloads are randomly assigned to worker nodes.
Kube-Scheduler: This scenario uses Kubernetes’
built-in scheduling component. Best-All: an ideal
scenario where each application was executed with
the best possible configuration regarding worker node
selection and thread count, resulting in the lowest
energy-delay product. This optimal configuration was
identified by exhaustively testing all combinations of
worker nodes, and thread counts for each workload.
5.1 Accuracy of SmartNodeTuner
Table 1 compares the configurations predicted by
SmartNodeTuner with those identified through ex-
haustive search (referred to as Best-All) for the ten
validation workloads. Each configuration is repre-
sented as < worker node − #threads >. The table
also indicates the rank of SmartNodeTuner’s predic-
tion among all possible configurations. As shown,
no single configuration (working node and number
of threads) provides the best trade-off between per-
formance and energy consumption across all applica-
tions. For instance, the optimal configuration found
by Best-All for BFS is to run it with four threads
on the WN16 system, whereas the CUTCP bench-
mark performs best with 56 threads on the working
node with 64 cores. To further analyze this behav-
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code
55
0.1
1
10
100
2 8 14 20 26 32 38 44 50 56 62
Energy-Delay Product
(x10³)
Number of Cores
SmartNodeTuner
Best-All
10
100
1000
10000
2 8 14 20 26 32 38 44 50 56 62
Number of Cores
SmartNodeTuner
Best-All
10
100
1000
10000
2 8 14 20 26 32 38 44 50 56 62
Number of Cores
WN16
WN24
WN64
Best-All
SmartNodeTuner
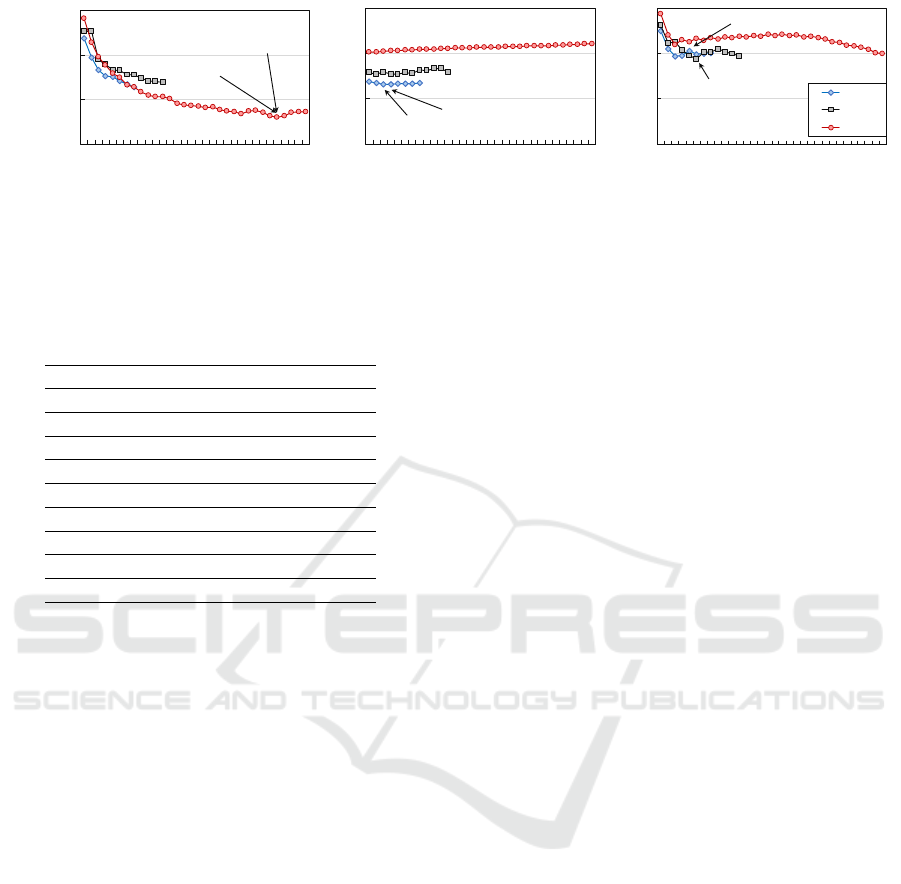
a) CUTCP b) FFT c) LBM
Figure 4: EDP behavior of three workloads when running on the evaluated platforms.
Table 1: Combinations found by Best-All and SmartNode-
Tuner for each workload.
Best-All
SmartNode
Tuner
Top-Best
(%)
EDP
Diff
BFS WN16-4 WN16-6 < 2% 2.05
BT-NAS WN64-52 WN64-64 < 8% 1.25
CUTCP WN64-56 WN64-56 < 1% 1.00
EP-NAS WN16-16 WN16-16 < 1% 1.00
FFT WN16-8 WN16-6 < 2% 1.01
HPCG WN16-8 WN16-8 < 1% 1.00
LBM WN24-12 WN16-14 < 7% 1.31
MG-NAS WN24-12 WN24-12 < 1% 1.00
NB WN16-4 WN16-2 < 2% 1.77
SGEMM WN16-8 WN16-8 < 1% 1.00
ior, Figure 4 illustrates the EDP for all evaluated con-
figurations of working nodes and thread counts when
running three applications with distinct characteris-
tics (CUTCP, FFT, and LBM). We also highlight the
configurations found by Best-All and predicted by
SmartNodeTuner.
For applications with a high average IPC and a
low ratio of time spent accessing main memory (in-
dicated by fewer L3 cache misses), the competition
for shared resources is reduced. In such cases, run-
ning these applications on a working node with more
cores results in significant EDP reductions during ex-
ecution. This behavior is evident in the CUTCP ap-
plication, as shown in Figure 4.a, where the applica-
tion scales well and benefits from the large number
of cores and cache memory available on the WN64
system. A similar pattern was observed for BT-NAS.
Conversely, for applications with limited paral-
lelism and a moderate ratio of time spent accessing
main memory, the best EDP results are achieved by
running them on a working node with fewer cores,
minimizing the impact of data communication among
threads. This was the case for applications such as
BFS, EP-NAS, FFT, HPCG, NB, and SGEMM. For in-
stance, Figure 4.b illustrates the scenario for the FFT
application, where the WN16 system delivered the
best results. Additionally, applications with a moder-
ate degree of TLP achieved optimal performance on
the working node with 24 cores, as observed in the
LBM application shown in Figure 4.c.
Analyzing the results obtained by SmartNode-
Tuner in Table 1, it correctly predicted the optimal
configuration in half of the cases. While this accu-
racy rate may appear low, it underscores the complex-
ity of the optimization challenge, with 104 possible
configurations per workload. On top of that, 80% of
its predictions were within the Top-2 configurations,
and all were within the Top-8. Table 1 also com-
pares the EDP between SmartNodeTuner and Best-
All (EDP Diff column), with values normalized to the
Best-All results. Hence, a value close to 1.0 means
that SmartNodeTuner reaches a configuration near the
optimal. In almost all cases, SmartNodeTuner pre-
dicted the combination of worker node and number
of threads within the 2% of best solutions, leading
to a difference of only 19% of EDP across all work-
loads. The worst case for SmartNodeTuner was for
the NB and BFS workloads due to the sensitivity of
these applications to thread synchronization issues.
For this type of application, increasing the number of
active threads leads to more time spent synchronizing
data within parallel regions, which can degrade per-
formance and energy efficiency.
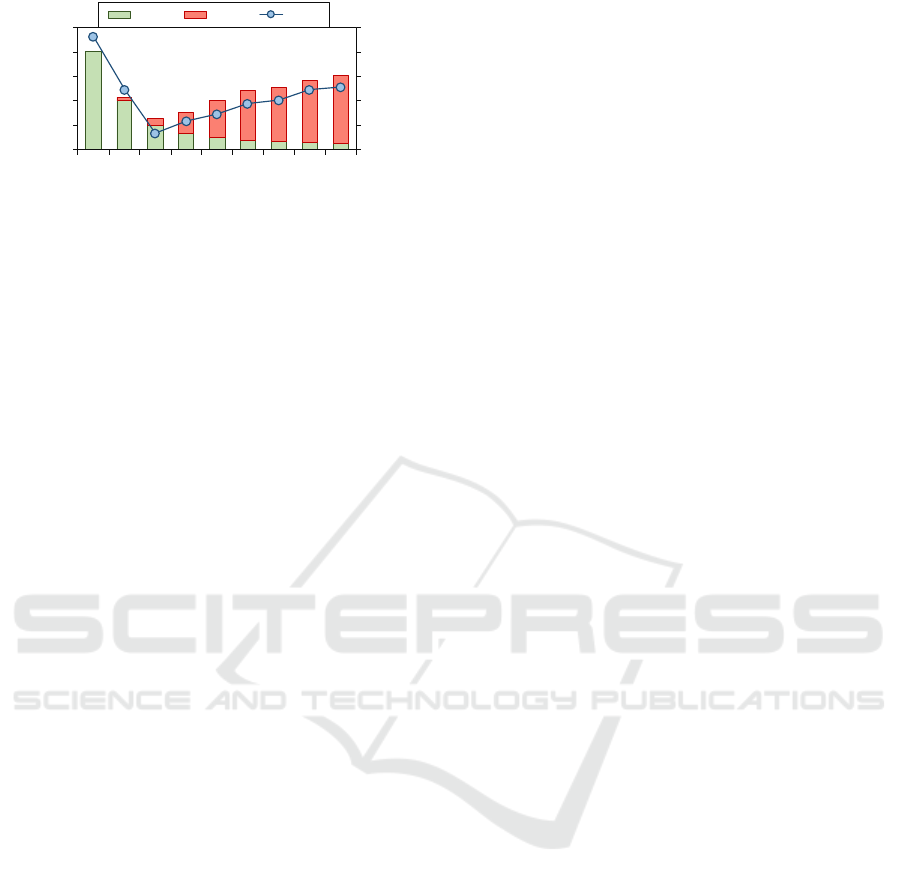
This behavior is illustrated for the BFS applica-
tion in Figure 5 on the working node with 16 cores
(WN16). The x-axis represents the number of ac-
tive threads. At the same time, the execution time
is divided into two parts: the time spent executing
the parallel region and the time spent synchronizing
data. Therefore, the total execution time is the sum
of these parts. The secondary y-axis shows the to-
tal energy consumption, measured in Joules. As de-
picted, the execution time decreases as the number
of threads increases from one to four. However, be-
yond this point, synchronization overhead surpasses
the execution time of the benefits obtained due to par-
allelization, resulting in increased execution time and
energy consumption, thereby worsening the EDP. Al-
though SmartNodeTuner was able to predict a near-
optimal configuration (WN16-6 instead of WN16-4),
the EDP difference compared to the Best-All solution
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
56
0
100
200
300
400
500
0.0
2.0
4.0
6.0
8.0
10.0
1 2 4 6 8 10 12 14 16
Energy (Joules)
Execution Time (s)
Number of Cores
Parallel Critical Energy
Figure 5: Thread Scalability of BFS on the WN16.
was 2.05 times.
5.2 EDP Comparison
In this subsection, we compare the EDP results of
each strategy running the workloads on the target pri-
vate cluster, as described in Section 4. For that, Fig. 6
illustrates the EDP of each strategy normalized to the
Best-All for each workload, represented by the black
line. Moreover, Fig. 7 depicts the distribution of the
EDP results normalized to the best EDP achieved on
each workload (Best-All). Hence, the closer the val-
ues are to 1.0, the better the EDP. In this analysis, our
primary interest is achieving a distribution of EDP re-
sults on the validation workloads as close as possible
to the Best-All. Hence, an ideal outcome would be a
compact boxplot in Fig. 7, indicating low variability
in achieving the best EDP for each workload and near
1.0.
We begin by analyzing the EDP of our strat-
egy, SmartNodeTuner, compared to the standard ex-
ecution strategy on each worker node (STD-WN16,
STD-WN24, and STD-WN64). As shown in Fig. 6,
SmartNodeTuner achieved better EDP across most
cases. The most significant gains by choosing an ideal
worker node and TLP degree were observed in ap-
plications with limited thread scalability due to data
synchronization overhead, such as NB and BFS. As
discussed by Suleman et al., (Suleman et al., 2008;
Lorenzon et al., 2018; Maas et al., 2024), using the
maximum number of threads to execute this kind of
workload increases execution time and energy usage
due to the overhead on the critical regions, nega-
tively impacting EDP. On the other hand, in scenarios
where ideal EDP aligns with maximum thread count,
the results were similar (e.g., EP-NAS for the STD-
WN16. Overall, SmartNodeTuner achieved EDP im-
provements, with geometric means showing enhance-
ments of 54.9%, 77.8%, and 81.7% on STD-WN16,
STD-WN24, and STD-WN64 configurations, respec-
tively. Even when compared to the best EDP achieved
per worker node (Best-WN16, Best-WN24, and Best-
WN64), SmartNodeTune achieves better overall EDP,
highlighting the importance of selecting not only the
optimal thread count per worker node but also finding
an ideal worker node to execute the given workload.
On average, across all workloads, SmartNodeTuner
improves EDP by 17.9%, 35.1%, and 43.4% over the
best threading configuration on the machines, respec-
tively.
While Random and Kube-Scheduler can deliver
better EDP results than the standard execution on each
worker node, neither outperforms the EDP improve-
ments provided by SmartNodeTuner. On average,
SmartNodeTuner achieves a 38.2% higher EDP effi-
ciency than Kube-Scheduler across all applications.
The main reason we found during the experiments is
that the decisions made by the scheduler do not con-
sider the efficiency in resource utilization, leading to
less optimal choices for node and thread allocation.
Instead, it considers resource availability, e.g., CPU
and memory behavior. Differently, SmartNodeTuner
considers the workload characteristics regarding re-
source efficiency when deploying it for execution, op-
timizing thread distribution, and node allocation.
Finally, let us consider the EDP distribution across
configurations, shown in Fig. 7. The goal here is
to achieve a compact distribution near 1.0, indicating
both low variability and a high EDP efficiency rel-
ative to the exhaustive search results (Best-All). In
this context, SmartNodeTuner maintained a consis-
tently narrow distribution, centered close to 1.0 across
various workloads. By contrast, the other configura-
tions have wider spreads and higher median values,
reflecting more significant inconsistency and gener-
ally worse EDP efficiency overall.
5.3 Impact on the Performance and
Energy Consumption
Improving, at the same time, the energy efficiency
and performance in cloud computing environments is
challenging as it requires balancing both metrics so
that one metric is not compromised due to the im-
provements on the other. In this scenario, to assess
the efficacy of SmartNodeTuner in achieving this bal-
ance, we compared the performance and energy con-
sumption to all the previously discussed strategies.
For that, Fig. 8a shows the performance reached
by each strategy normalized to the Best-All configu-
ration, considering the geometric mean of all work-
loads. In this plot, the closer the value is to 1.0, the
better the performance. Similarly, Fig. 8b depicts the
energy consumption normalized to the best result. In
this plot, the lower the value is, the less energy was
spent during execution.
Because our approach, SmartNodeTuner, can pre-
dict configurations that are most of the time within
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code
57

0.0
0.2
0.4
0.6
0.8
1.0
1.2
EP-NAS FFT HPCG MG-NAS SGEMM BFS NB BT-NAS CUTCP LBM GMEAN
EDP Normalized
STD-WN16 WTD-WN24 STD-WN64 Best-WN16 Best-WN24 Best-WN64 KS Random SmartNodeTuner
Figure 6: EDP results on each workload, normalized to the Best-All, represented by the black line.
EDP Normalized to
Best-All
0.0
0.2
0.4
0.6
0.8
1.0
1.2
STD
-
WN16
STD
-
WN24
STD
-
WN64
Best
-
WN16
Best
-
WN24
Best
-
WN64
Kube
-
Sched
.
Random
SmartNodeTuner
Best
-
All
Figure 7: Distribution of EDP results for each strategy
across all workloads.
the Top-2%, it can reach energy consumption lev-
els as close to the ideal one (only 7.01% of differ-
ence) while not jeopardizing the overall performance
(10.5%) as the other strategies do. When compar-
ing SmartNodeTuner with the configuration that de-
livers the lowest overall energy consumption (Best-
WN16), it is 5.3% more energy-hungry but reaches
performance levels 28.2% higher. When only the per-
formance matters, Best-WN24 can deliver better per-
formance without considering the Best-All configura-
tion (6% higher than SmartNodeTuner) at the price of
64.6% more energy spent.
5.4 Overhead of SmartNodeTuner
Achieving configurations consistently within the Top-
2% best solutions allows SmartNodeTuner to approx-
imate the EDP efficiency of an exhaustive search
(Best-All) with much lower overhead. Unlike exhaus-
tive search, SmartNodeTuner profiles each applica-
tion only once with a default configuration, and the
inference process takes only 0.0093s per lookup. In
this scenario, the time it took for SmartNodeTuner to
run each target application with the standard config-
uration and predict an ideal combination of TLP de-
gree and worker node was only 413.75s, compared
to 26377.01s of the exhaustive search. On the other
hand, the feature extraction part for the ANN model
incurs the highest computational cost: 2.38 hours
on WN16, 2.79 hours on WN24, and 10.31 hours
on WN64, with respective energy costs of 3.42x10
5
J, 8.61x10
5
J, and 3.50x10
6
J. However, it is worth
mentioning that this extraction phase is performed
only once, and this cost can be further minimized via
strategies like sampling, reduced input sets, or dis-
tributed computing, which are not the goal of this pa-
per.
6 CONCLUSION
We have presented SmartNodeTuner, a framework
for optimizing the performance and energy consump-
tion when executing HPC workloads in cloud envi-
ronments using AI and IaC. It considers the behav-
ior of parallel workloads to predict ideal combina-
tions of worker nodes and TLP degrees. By incor-
porating IaC into the automation process of SmartN-
odeTuner, the resource management is simplified, be-
ing applied to diverse cloud infrastructures. When
evaluating SmartNodeTuner over the execution of ten
well-known parallel workloads on a heterogenous en-
vironment, we show that it predicts combinations that
reach EDP values close to the ones achieved by the
exhaustive search, improving the EDP by 38.2% com-
pared to the standard scheduler used by Kubernetes.
We also show that by employing SmartNodeTuner,
the application’s performance is marginally affected
while providing significant energy savings. As fu-
ture work, we plan to increase the compatibility of
SmartNodeTuner with other cluster orchestrators, al-
lowing users more flexibility in selecting cloud and
HPC solutions.
ACKNOWLEDGEMENTS
This study was partly financed by the CAPES - Fi-
nance Code 001, FAPERGS - PqG 24/2551-0001388-
1, and CNPq.
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
58

0.0
0.2
0.4
0.6
0.8
1.0
1.2
STD-WN16
WTD-WN24
STD-WN64
Best-WN16
Best-WN24
Best-WN64
Kube-Sched.
Random
SmartNodeTuner
Best-All
Perf. Normalized
(a) Performance
0.0
1.0
2.0
3.0
4.0
STD-WN16
WTD-WN24
STD-WN64
Best-WN16
Best-WN24
Best-WN64
Kube-Sched.
Random
SmartNodeTuner
Best-All
Energy normalized
(b) Energy consumption
Figure 8: Performance and Energy results for each strategy normalized to Best-All.
REFERENCES
Bailey, D. H., Barszcz, E., Barton, J. T., Browning, D. S.,
Carter, R. L., Dagum, L., Fatoohi, R. A., Frederick-
son, P. O., Lasinski, T. A., Schreiber, R. S., Simon,
H. D., Venkatakrishnan, V., and Weeratunga, S. K.
(1991). The nas parallel benchmarks and summary
and preliminary results. In ACM/IEEE SC, pages 158–
165, USA. ACM.
Barham, P., Dragovic, B., Fraser, K., Hand, S., Harris, T.,
Ho, A., Neugebauer, R., Pratt, I., and Warfield, A.
(2003). Xen and the art of virtualization. SIGOPS
Oper. Syst. Rev., 37(5):164–177.
Borovits, N., Kumara, I., Krishnan, P., Palma, S. D.,
Di Nucci, D., Palomba, F., Tamburri, D. A., and
van den Heuvel, W.-J. (2020). Deepiac: deep
learning-based linguistic anti-pattern detection in iac.
In Proceedings of the 4th ACM SIGSOFT Interna-
tional Workshop on Machine-Learning Techniques
for Software-Quality Evaluation, MaLTeSQuE 2020,
page 7–12, New York, NY, USA. Association for
Computing Machinery.
Che, S., Boyer, M., Meng, J., Tarjan, D., Sheaffer, J. W.,
Lee, S.-H., and Skadron, K. (2009). Rodinia: A
benchmark suite for heterogeneous computing. In
IEEE Int. Symp. on Workload Characterization, pages
44–54, DC, USA. IEEE Computer Society.
Ham, T. J., Chelepalli, B. K., Xue, N., and Lee, B. C.
(2013). Disintegrated control for energy-efficient and
heterogeneous memory systems. In IEEE HPCA,
pages 424–435.
Huang, H., Rao, J., Wu, S., Jin, H., Jiang, H., Che, H.,
and Wu, X. (2021). Towards exploiting cpu elas-
ticity via efficient thread oversubscription. In Pro-
ceedings of the 30th International Symposium on
High-Performance Parallel and Distributed Comput-
ing, HPDC ’21, page 215–226, New York, NY, USA.
Association for Computing Machinery.
Kumara, I., Vasileiou, Z., Meditskos, G., Tamburri, D. A.,
Heuvel, W.-J. V. D., Karakostas, A., Vrochidis, S., and
Kompatsiaris, I. (2020). Towards semantic detection
of smells in cloud infrastructure code. ARXIV-CS.SE.
Lepiller, J., Piskac, R., Sch
¨
af, M., and Santolucito, M.
(2021). Analyzing infrastructure as code to prevent
intra-update sniping vulnerabilities. International
Conference on Tools and Algorithms for the Construc-
tion and Analysis of Systems.
Liu, F., Tong, J., Mao, J., Bohn, R., Messina, J., Badger, L.,
and Leaf, D. (2012). NIST Cloud Computing Refer-
ence Architecture: Recommendations of the National
Institute of Standards and Technology. CreateSpace
Independent Publishing Platform, USA.
Lorenzon, A. F. and Beck Filho, A. C. S. (2019). Parallel
computing hits the power wall: principles, challenges,
and a survey of solutions. Springer Nature.
Lorenzon, A. F., De Oliveira, C. C., Souza, J. D., and Beck,
A. C. S. (2018). Aurora: Seamless optimization of
openmp applications. IEEE transactions on parallel
and distributed systems, 30(5):1007–1021.
Maas, W., de Souza, P. S. S., Luizelli, M. C., Rossi,
F. D., Navaux, P. O. A., and Lorenzon, A. F. (2024).
An ann-guided multi-objective framework for power-
performance balancing in hpc systems. In Proceed-
ings of the 21st ACM International Conference on
Computing Frontiers, CF ’24, page 138–146, New
York, NY, USA. Association for Computing Machin-
ery.
M
´
arquez, G., Villegas, M. M., and Astudillo, H. (2018).
A pattern language for scalable microservices-based
systems. In ECSA, NY, USA. ACM.
Masanet, E., Shehabi, A., Lei, N., Smith, S., and Koomey,
J. (2020). Recalibrating global data center energy-use
estimates. Science, 367(6481):984–986.
Navaux, P. O. A., Lorenzon, A. F., and da Silva Serpa, M.
(2023). Challenges in high-performance computing.
Journal of the Brazilian Computer Society, 29(1):51–
62.
Palma, S. D., Nucci, D. D., and Tamburri, D. A. (2020).
Ansiblemetrics: A python library for measuring
infrastructure-as-code blueprints in ansible. SOFT-
WAREX.
Saavedra, N. and Ferreira, J. F. (2022). Glitch: Automated
polyglot security smell detection in infrastructure as
code. ARXIV-CS.CR.
Sandobalin, J., Insfr
´
an, E., and Abrah
˜
ao, S. M. (2017). An
infrastructure modelling tool for cloud provisioning.
IEEE International Conference on Services Comput-
ing (SCC).
Sandobal
´
ın, J., Insfran, E., and Abrah
˜
ao, S. (2020). On the
Energy-Aware Node Selection for Cloud-Based Parallel Workloads with Machine Learning and Infrastructure as Code
59

effectiveness of tools to support infrastructure as code:
Model-driven versus code-centric. IEEE ACCESS.
Stratton, J., Rodrigues, C., Sung, I., Obeid, N., Chang, L.,
Anssari, N., Liu, G., and Hwu, W. (2012). Parboil: A
revised benchmark suite for scientific and commercial
throughput computing. Center for Reliable and High-
Performance Computing.
Subramanian, L., Seshadri, V., Kim, Y., Jaiyen, B., and
Mutlu, O. (2013). MISE: Providing performance
predictability and improving fairness in shared main
memory systems. In IEEE HPCA, pages 639–650.
Suleman, M. A., Qureshi, M. K., and Patt, Y. N.
(2008). Feedback-driven threading: Power-efficient
and high-performance execution of multi-threaded
workloads on cmps. SIGARCH Comput. Archit. News,
36(1):277–286.
Vuppalapati, C., Ilapakurti, A., Chillara, K., Kedari, S., and
Mamidi, V. (2020). Automating tiny ml intelligent
sensors devops using microsoft azure. IEEE Interna-
tional Conference on Big Data (Big Data).
CLOSER 2025 - 15th International Conference on Cloud Computing and Services Science
60
