
A Case Study on Defining Infrastructure Sensor Positions with
Consideration of Existing Infrastructure
Philipp Klein
a
Institute of Vehicle Concepts, German Aerospace Center, Pfaffenwaldring38-40, 70569 Stuttgart, Germany
Keywords: Intelligent Traffic Systems, Infrastructure Sensors, GIS Analysis.
Abstract: Support by infrastructure sensors can be crucial to enable automated vehicles to safely navigate complex
urban driving environments. Finding the suitable positions for infrastructure sensors is a complex problem
with different demands and factors. This paper proposes a method of automating the process of selecting
positions for infrastructure sensors in a 2D environment. The positions are selected using available data of the
streets, for sensor placement suitable existing infrastructure and sensor coverage demands. This methodology
is then applied to finding sensor positions in the neighborhood of Lausitzer Platz in Berlin, Germany. The
sensor demands for this are to taken from a virtual roll out scenario of the U-Shift vehicle concept. This is
done by first finding suitable sensor positions for the bigger streets with the highest cargo and person
transportation demand and then covering of every street in the neighborhood. In this use case more than half
the sensor could be placed on existing infrastructure, if there is a high density of existing infrastructure that
is suitable for the placement of sensors.
1 INTRODUCTION
Although car manufacturers have made a lot progress
in increasing the capabilities of their driving
assistance systems in the recent years, eliminating the
need of constant human supervision remains an
unsolved challenge for production cars. This is
especially true for urban and suburban traffic. The
driving environment in these is highly complex with
a lot of other traffic participants, some of which are
Vulnerable Road Users (VRU) like for example
pedestrians and cyclist. Another big challenge in
these scenarios are occlusions of the field of view of
automated vehicles by other traffic participants,
buildings and other objects like trees and signs. One
approach to enable save navigation through this
complex urban traffic is the support by other
automated vehicles and infrastructure to provide
additional information. To exchange this information
between traffic participants ‘Vehicle to Everything’
communication is used. as standardized by the
European Telecommunications Standards Institute
(ETSI) as ITS-G5 (ETSI 2020). ETSI defines
messages over which perceived objects (CPM),
information about the ego vehicle (CAM) and
a
https://orcid.org/0009-0000-9343-1536
coordination of maneuvers and trajectories (MCM),
can be communicated with other traffic participants.
A way to achieve a higher quality of information
is the placement of sensors outside of vehicles. The
acquired information is then shared with traffic
participants via CPM messages.
Infrastructure sensor systems have an inherent
advantage by being placed higher than vehicles and
being able to have multiple perspectives of the
driving situation. The extent of this sensor coverage
can range from only on some points of interest, like
for example especially dangerous intersections, to
coverage of the whole area of operation, as proposed
in the concept Managed automated driving (MAD)
(Schindler 2023).
There are different coverage and economic,
demands on the infrastructure. To cover a area of
relevant size, many sensors have to be placed and a
lot of factors have to be considered to find suitable
positions. While there has been previous work on
improving and automating larger scale placement of
other traffic infrastructure like street lights (Baihaki
et al. 2024; Ishak 2021) or infrastructure
communication units (Huo et al. 2024). Work on the
placement of infrastructure sensors is usually focused
on finding an optimal sensor configuration, with the
582
Klein, P.
A Case Study on Defining Infrastructure Sensor Positions with Consideration of Existing Infrastructure.
DOI: 10.5220/0013419800003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 582-587
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
least number of sensors possible (Akbarzadeh et al.
2014; Argany et al. 2018; Geissler and Grafe 2019).
In a real-world rollout however, the number of needed
sensors is not the only factor to consider. The cost of
constructing a pole, to place the sensor upon, can be
multiple times the cost of the actual sensor unit. This
paper proposes a methodology for finding a suitable
infrastructure sensor configuration for a quarter,
prioritizing existing infrastructure to place sensor
units. The approach uses a 2D representation of the
environment using geographic data in formats of the
Geographic information system (GIS). Chapter 2
describes the methodology of placing the sensors,
Chapter 3 then applies the methodology to the use
case of a virtual scenario of an operation of U-Shift
vehicles in the neighborhood of Lausitzer Platz in
Berlin, Germany.
2 METHODOLOGY
In this section the algorithm for finding sensor
positions is described. First the necessary input
parameters are described, then the actual placement
algorithm.
2.1 Input Parameters
The input parameters for the proposed automated
finding of infrastructure sensor positions are: street
data, sensor demands, candidate poles and loss
function.
The required street data contains all streets on
which sensors are to be placed. A street is defined as
a polynomial path between two intersection points.
This selection is based on spatial limits. Within these
spatial limits single streets can also be selected or
deselected based on preference.
There are two ways to define sensor demands. The
first are fixed-point demands and define a maximum
distance, within which an infrastructure sensor has to
be placed. This can used to make sure a point of
interest, like for example intersection points or bus
stops have sufficient sensor coverage. The second
way of defining a sensor demand is a sensor density
demand. It is defined by a maximum distance
between to sensor poles and can be varied for each
street. Through this the sensor density can be varied
to consider streets with higher risk of personal harm,
like for example streets with unprotected bicycle
paths or streets near schools.
In some cases, existing infrastructure like lamp
posts and traffic lights can be used to place sensors.
This avoids the cost and planning associated with the
construction of sensor poles in an urban environment.
The input candidate poles is a list of the positions of
all existing infrastructure suitable for placing sensors.
The fourth input parameter is the cost function. It
defines what cost the placement of a sensor and pole
has. This cost can be an economic cost, but also
societal costs like use of public space. The function
can contain per piece costs for sensors or poles but
also for example cost dependent on the location of the
pole.
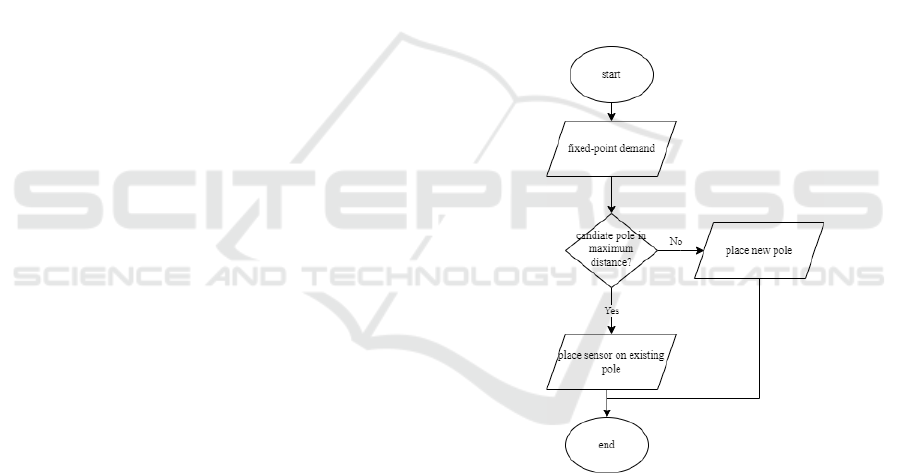
2.2 Placement Algorithm
The algorithm starts by searching Sensor positions to
fulfil all fixed-point demands. The algorithm checks,
if there are any candidate poles that fulfil the
maximum distance demands. If that is the case, the
sensors are placed on that location. If there is no
suitable candidate pole, a new pole is placed directly
at the fixed-point demand.
Figure 1: Flowchart of the placement algorithm to meet
fixed-point demands.
In the next step the streets are separated into street
sections. A street section is defined as the area
between two fixed-point sensor poles. To find a
suitable sensor configuration, the following process is
done for each street section: In the first step, the
minimum number of poles required for covering the
street section are placed in a way, that the distances
between all sensor pole on the street section is the
same. This sensor configuration is then saved as
configuration 1 and the cost of is determined through
the cost function. In the next step the nearest pole
candidate for each optimal sensor positions it is
A Case Study on Defining Infrastructure Sensor Positions with Consideration of Existing Infrastructure
583
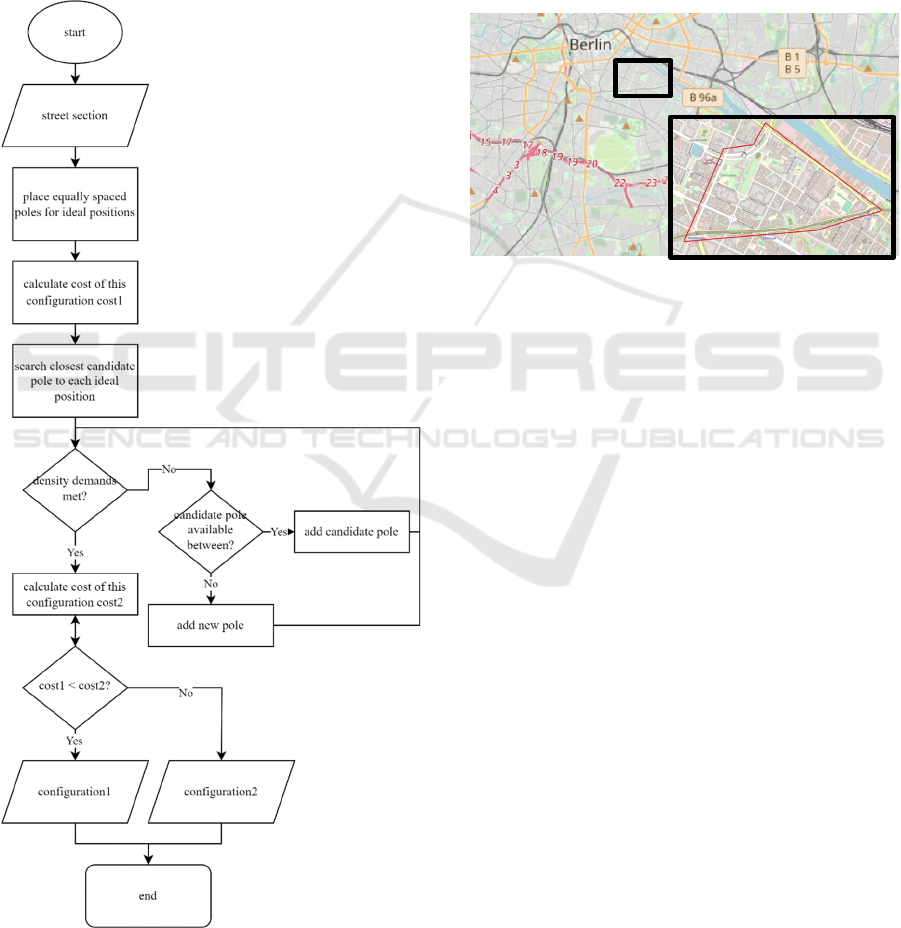
determined and then checked if the maximum
distance requirements are still fulfilled for all
distances between poles. If not, a candidate pole in
between is searched in between the two poles, which
don’t fulfil the requirement. If none is found, a new
pole is placed in the middle of these two poles. When
all distances between poles are below the maximum
distance, this sensor configuration is called sensor
configuration 2 and its cost is calculated. Then the
cost of both sensor configurations is compared and
the configuration with the lower cost is picked.
Figure 2: Flowchart of the placement algorithm to meet
density demands.
3 APPLICATION
In this chapter the proposed algorithm for finding a
suitable sensor configuration is applied to a specific
use case. The use case is a virtual scenario of an
operation of a fleet of U-Shift vehicles in the
neighborhood of Lausitzer Platz in Berlin. The
scenario and the parameters and data inputs derived
from it are specified in the following subchapter.
Then the results for a partial and a full coverage of the
streets with sensors are presented.
Figure 3: Definition of the Neighbourhood Lausitzer Platz.
3.1 Use Case and Input Parameters
The goal of the generated sensor configuration is the
support of a fleet of U-Shift vehicles in the
neighborhood of Lausitzer Platz in Berlin, Germany
in a virtual scenario. The neighborhood is defined as
the area marked in red in Figure 3 and covers around
1 square kilometer. The U-Shift vehicle concept is a
modular and driverless vehicle. The driving module
is separated from the transport capsule. This enables
the vehicle to fulfill different driving demands by
loading different capsules. Examples for this are a
Cargo Capsule for the delivery of goods and a Person
Capsule for transporting people.
The street data for the finding of sensors positions
is taken from data provided through the data portal
FIS-Broker(Stadt Berlin) by the city of Berlin. The
data is filtered to enable two coverage scenarios to be
investigated. In the first scenario, only the most
important streets in the neighborhood are covered
with sensors. For this scenario streets are selected by
the following criteria. Firstly, Streets with a high
density of shops and restaurants are picked to enable
U-Shift to services Cargo demands. Streets with a
high density of available candidate poles for sensor
placement are also preferred, since this could reduce
the cost of sensor placements. In the last step some
streets not fulfilling the previous requirements to
achieve a well-connected street network without any
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
584
dead ends. The second scenario then covers all streets
in the neighborhood.
The list of candidate poles is created using FIS-
Broker data of traffic lights as well as street lights.
The street lights data contains categories for each
street light. These categories were then evaluated for
suitability for sensor placement using samples from
pictures in google street view. The results were used
to filter out street lamps unsuitable for sensor
placement.
The fixed-point demands on the infrastructure
sensors are the following: All intersection points are
set to have a maximum distance of 5 meters to the
next sensor pole to provide additional safety. In
addition to that all U-Shift Cargo and Person pick up
points are set to have a maximum distance off 5
meters to the next sensor pole. This demand is set to
assist the vehicles for the high precision backwards
driving and give more security to passengers entering
the person capsules.
To ensure safe operations of the U-Shift fleet, a
complete coverage of the area of operation by
infrastructure sensors is defined. The maximum
distance between sensors units was defined as 80m,
as proposed in the MAD feasibility study (Weimer
2020). For streets with bicycle lane a maximum
distance between sensors of 50m was chosen, to give
more safety to vulnerable road users.
For the cost function a cost of 1 unit or placing
sensors on existing infrastructure and 10 units for
placing a new sensor pole is chosen. The goal of this
is to represent the additional cost of construction for
a new pole. This results in the following cost function
𝑐𝑜𝑠𝑡
for a street section with the number of
newly placed poles 𝑛
and number of candidate
poles used ∗𝑛
:
𝑐𝑜𝑠𝑡
10∗𝑛
1∗𝑛
(1)
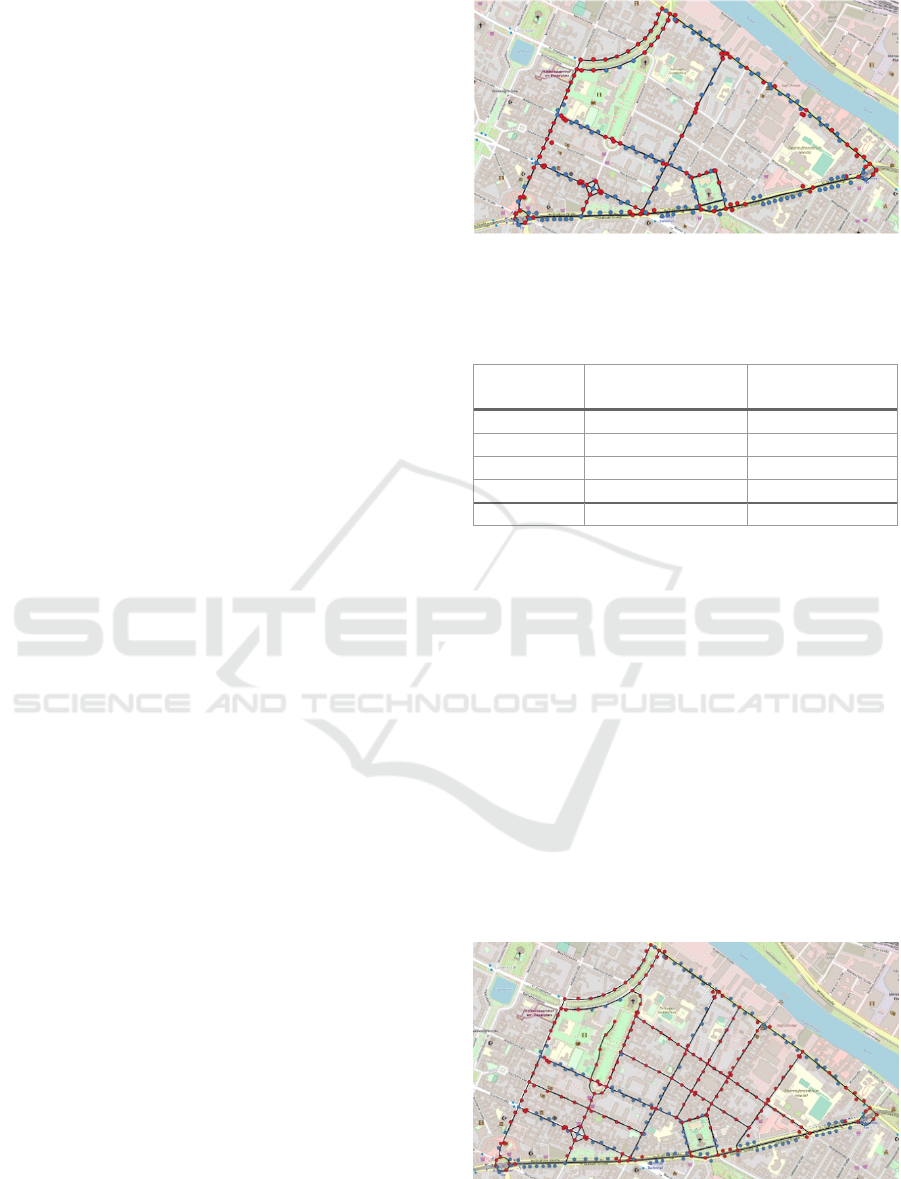
3.2 Results Partial Coverage
As discussed, in the first scenario not all streets of the
neigborhood of Lausitzer Platz are considered for the
sensor configuration. The scenario contains 69 of the
97 total streets of the area. Figure 4 shows the
considered streets in black, cases where new sensor
posts would have to be placed in red and locations
were sensors could be placed on existing
infrastructure in blue.
The detailed distribution of the sensor position
can be seen in Table 1. 52 sensor units were placed
overall. For 133 of them existing infrastructure could
be used, 119 new poles were placed. To fulfill the
Whereas
to
fulfil
the
density
demands
85%
of
the
Figure 4: Infrastructure configuration to partly cover the
streets of Lausitzer Platz.
Table 1: Distribution of placed sensors for the partial rollout
scenario of Lausitzer Platz.
infrastructure
use
d
new poles
Intersection 8 46
Cargo 6 18
Person 3 35
densit
y
116 20
overall 133 119
fixed-point demands (intersection, cargo and person),
12% of the poles were existing infrastructure. sensors
were placed on existing infrastructure. This large
difference can be explained by the low maximum
distance parameters used for the fixed-point demands.
3.3 Results Full Coverage
The second scenario includes all 97 streets. The final
sensor configuration contains 342 sensor poles
overall. The streets and positions can be seen in
Figure 5, using the same colours as Figure 4. The
detailed distribution of the placed sensors can be seen
in Table 2. To fulfil the fixed-point demands, most
poles
had to be newly placed. 58% of the sensors to
fulfil density requirements could use existing
infrastructure.
Figure 5: Infrastructure configuration to cover all streets of
Lausitzer Platz.
A Case Study on Defining Infrastructure Sensor Positions with Consideration of Existing Infrastructure
585

Table 2: Distribution of placed sensors for the full rollout
scenario of Lausitzer Platz.
infrastructure
used
new poles
Intersection
8 57
Cargo
6 25
Person
3 43
density
116 84
overall
133 209
Compared to the partial coverage scenario, all
additionally placed sensors were newly placed. Most
of these streets have historic gas-powered street
lights. These are specific to Berlin and because of
their low height not suitable for sensor placement.
This shows that the suitability of the existing
infrastructure for sensor placement can highly
influence the number of sensor poles that have to be
constructed and therefore the cost of covering an area
with infrastructure sensors.
4 CONCLUSION AND FUTURE
WORK
A method for automating the process of finding a
configuration of infrastructure sensors for a large area
was developed. It can fulfil both fixed-point and
density demands. It considers existing infrastructure
suitable for sensor placement and uses a cost function
to compare different sensor configurations. This
methodology was then applied to two virtual
coverage scenarios for a neighborhood in Berlin,
Germany. The first scenario covers only parts of the
streets and the second all streets. For the partial
coverage scenario around half the sensors could be
placed on existing infrastructure and it could be
shown, that the strictness of the sensor demands and
suitability of the existing infrastructure influences the
share of newly placed poles and therefore influence
the cost in a real-world rollout. However, the
methodology was only applied to one specific
neighborhood. To verify and generalize the results the
same methodology will have to be applied to more
locations with urban or suburban traffic.
Since the methodology is based on a 2D model of
the environment, it can’t consider possible obstacles
like trees, parking cars and buildings. Therefore, the
method provides a first overview of the sensor
placement and gives a starting point for cost
estimation and exact pole positioning. For a real-
world rollout however, every position will still have
to be verified to consider all the additional restrictions
in the real world or a highly accurately modelled 3D
environment.
The placement of sensors in a real-world rollout
can also have many cost factors and constraints not
considered by the proposed methodology. Examples
for that are the availability of electrical grid
connection and cost of providing internet connection
to the individual locations. To take this into account
an extension of the cost function or additional
constraints on sensor positions would be possible.
The biggest challenge for that, is the availability of
high-resolution data of these factors.
REFERENCES
Akbarzadeh, Vahab; Lévesque, Julien-Charles; Gagné,
Christian; Parizeau, Marc (2014): Efficient sensor
placement optimization using gradient descent and
probabilistic coverage. In Sensors (Basel, Switzerland)
14 (8), pp. 15525–15552. DOI: 10.3390/s140815525.
Argany, Meysam; Karimipour, Farid; Mafi, Fatemeh;
Afghantoloee, Ali (2018): Optimization of Wireless
Sensor Networks Deployment Based on Probabilistic
Sensing Models in a Complex Environment. In JSAN 7
(2), p. 20. DOI: 10.3390/jsan7020020.
Baihaki, Rifki Ilham; Mursyidah, Indah Lutfiyatul;
Darmaji, Darmaji (2024): Efficient Streetlight
Placement Using Dominating Set Theory. In CGANT
Journal of Mathematics and Applications 5 (1), pp. 19–
26. DOI: 10.25037/cgantjma.v5i1.113.
ETSI (2020): ETSI EN 302 663. ITS-G5 Access layer
specification for Intelligent Transport Systems
operating in the 5 GHz frequency band.
Geissler, Florian; Grafe, Ralf (2019): Optimized sensor
placement for dependable roadside infrastructures. In :
The 2019 IEEE Intelligent Transportation Systems
Conference - ITSC. Auckland, New Zealand, 27-30
October 2019. 2019 IEEE Intelligent Transportation
Systems Conference - ITSC. Auckland, New Zealand,
10/27/2019 - 10/30/2019. Institute of Electrical and
Electronics Engineers; IEEE Intelligent Transportation
Systems Society. Piscataway, NJ: IEEE, pp. 2408–
2413.
Huo, Yan; Yang, Ruixue; Jing, Guanlin; Wang, Xiaoxuan;
Mao, Jian (2024): A multi-objective Roadside Units
deployment strategy based on reliable coverage
analysis in Internet of Vehicles. In Ad Hoc Networks
164, p. 103630. DOI: 10.1016/j.adhoc.2024.103630.
Ishak, Zulkifli (2021): Placement accuracy algorithm for
smart street lights. In Turkish J. Electr. Eng. Comput.
Sci. 29.2, pp. 845–859.
Schindler, Julian (2023): Managed Automated Driving
(MAD) - A Concept for Empowering Road
Infrastructure.
Stadt Berlin: FIS-Broker. Edited by Stadt Berlin. Available
online at https://fbinter.stadt-berlin.de/fb/index.jsp.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
586

Weimer, Jürgen (2020): U-Shift MAD Managed
Automated Driving für U-Shift. Machbarkeitsstudie
Zulassungsfähigkeit und Wirtschaftlichkeit. With
assistance of Miriam Grünhäuser, Alexander Wiemer,
Anne Brunßen, Marc Zofka, Tobias Fleck, Marcus
Conzelman et al.
A Case Study on Defining Infrastructure Sensor Positions with Consideration of Existing Infrastructure
587
