
A Framework and Method for Intention Recognition to Counter Drones
in Complex Decision-Making Environments
Yiming Wang
1,† a
, Bowen Duan
1,† b
, Heng Wang
1,† c
, Yunxiao Liu
1,† d
, Han Li
2,† e
and
Jianliang Ai
1,
*
f
1
Department of Aeronautics & Astronautics, Fudan University, 220 Handan Road, Shanghai 200433, China
2
Department of Electrical Engineering, University of Shanghai for Science and Technology, 516 Jungong Road, Shanghai
200093, China
Keywords:
Counter Drones, Intention Recognition, BiLSTM, Decision-Making.
Abstract:
With the large-scale application of drones in various industries and the rapid development of a low-altitude
economy, a complex decision-making environment for counter-drones has been formed. Accurate drone inten-
tion recognition is of great significance for the defense of core assets such as power facilities. Therefore, based
on the proposed intention space description model, this paper establishes a drone intention recognition frame-
work in a complex decision-making environment and defines the key modules and processing procedures. In
addition, to further solve the problem of uncertainty in the time window of drone intention recognition infor-
mation acquisition in complex decision-making scenarios, this paper optimizes the algorithm by introducing
a dynamic time window adaptive adjustment mechanism based on the BiLSTM (Bi-directional Long Short-
Term Memory) network. The method described was validated through simulation experiments, confirming the
effectiveness of the framework presented in this paper. It is capable of performing four types of intention clas-
sification, assessing threats, and scoring for offensive targets. The optimized BiLSTM method demonstrates
high recognition accuracy. For drone targets with varying intentions, the recognition accuracy exceeds 96%
after applying the time window division.
1 INTRODUCTION
Drones are now commonly utilized in various fields,
including power inspection, agriculture, forestry,
plant protection, geographical surveying and map-
ping, and transportation. However, this increased
use has led to numerous challenges regarding drone
safety supervision. As a result, there is an urgent
need for effective intention recognition systems to
protect critical facilities from potential drone threats.
Currently, standard methods for early warning detec-
tion of drones primarily include radar detection (Yang
a
https://orcid.org/0009-0002-5100-977X
b
https://orcid.org/0009-0004-1101-3744
c
https://orcid.org/0009-0003-5207-6832
d
https://orcid.org/0009-0004-0593-9444
e
https://orcid.org/0009-0007-0284-2083
f
https://orcid.org/0000-0002-8982-8503
†
means these authors contributed equally to this work
and should be considered co-first authors; * means the cor-
responding author.
et al., 2023), radio detection (Cai et al., 2024), and
photoelectric detection (Wang et al., 2024). These
techniques allow for the identification of a drone’s po-
sition and movement. The goal of drone early warn-
ing detection is to assess whether a drone poses a
threat to protected facilities by classifying and iden-
tifying it. To effectively evaluate the threat level of a
drone, it is important to analyze its intentions based
on the available information about the drone. For in-
stance, in the context of substation defence, drones
operating nearby may be engaged in a variety of tasks,
such as inspecting transmission lines, spraying , con-
ducting surveys, or capturing recreational aerial pho-
tography. This leads to a complex operating envi-
ronment for drones. Traditional detection methods,
which depend on detection equipment and manage-
ment platforms, can only identify drone targets and
provide information about their positions and move-
ments without offering detailed insights into their po-
tential intentions. Whether it poses a threat still needs
to be further judged manually (Xue et al., 2024; Lof
`
u
Wang, Y., Duan, B., Wang, H., Liu, Y., Li, H. and Ai, J.
A Framework and Method for Intention Recognition to Counter Drones in Complex Decision-Making Environments.
DOI: 10.5220/0013431800003929
In Proceedings of the 27th International Conference on Enterprise Information Systems (ICEIS 2025) - Volume 1, pages 913-920
ISBN: 978-989-758-749-8; ISSN: 2184-4992
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
913

et al., 2023; Zhang et al., 2023). The above defects
pose severe challenges to defence in complex drone
operating environments. There is an urgent need to
research drone intention recognition-related technolo-
gies to achieve automated drone intention recognition
and provide a reference basis for threat assessment.
The drone intention recognition process trans-
lates multidimensional features into intention out-
put. These features may include the drone’s posi-
tion, movement state, mission area, and facilities to be
protected. For the simplified drone intention recogni-
tion method, based on the observed proximity of the
drone’s position to a particular area, it can be judged
whether the drone poses a threat. Bayesian reason-
ing method can better realize the inference of drone
intrusion intention, but this method needs to obtain
the drone state space for a long time (Liang et al.,
2021; Yun et al., 2023b). This method makes it dif-
ficult to accurately predict the potential intention of
the drone in a short time and results in poor real-time
intention recognition performance. To improve the
accuracy of drone intention recognition, an intention
recognition framework based on the crucial waypoint
and critical route area modelling was proposed (Kaza
et al., 2024), and the motion process of the drone was
used as a critical element in inferring intention (Yun
et al., 2023a). In addition, the method of intention
recognition based on drone flight trajectory predic-
tion has also been studied to a certain extent (Fraser
et al., 2023; Yi et al., 2024). The above methods have
made specific contributions to drone intention recog-
nition. However, modelling identifying intentions in
complex drone missions and area types requires fur-
ther research and testing.
In this paper, contribution could be summarized as
follows:
1. An intention space description model of drones
was established for the complex decision-making
scenarios of counter drones under the operation
of multiple types of drones, aiming at the prob-
lem of intention recognition. The mapping with
four types of intentions was expressed based on
the position, velocity, and area characteristics of
drones. The model forms the basis for research
on intention recognition of counter drones.
2. A drone intention recognition framework for dif-
ferent types of tasks in complex decision-making
scenarios was proposed. It includes a data stan-
dardization module, a multidimensional inten-
tion recognition module, and an offensive targets
threat ranking module that can realize intention
recognition based on drone original detection in-
formation. This framework can further complete
the discriminative output of offensive target se-
quences.
3. To address the uncertainty optimization problem
of information collection time windows for drone
intention recognition, a recognition method based
on the BiLSTM neural network with a dynami-
cally adapting time window is proposed. Different
time windows are employed for intention recogni-
tion depending on the type of drone. Simulation
experiments have confirmed the accuracy of this
method.
Figure 1: Substation defence scenario.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
914
2 SYSTEM FRAMEWORK
This paper discusses the method using the defence
scenario of important power facilities as an example.
As shown in Fig. 1, the no fly zone marked area is
an important power facility, which farmland, trans-
mission lines, wind power generation facilities, and
residential areas surround. There are many types of
drones with different purposes running in the above-
mentioned different types of areas. The main features
of intention recognition classification can be extracted
based on the mission area type and the flight status
information of the drones. Therefore, this paper pro-
poses a drone feature modelling method based on the
fusion of mission area type and flight status informa-
tion, which is used as an effective input for the inten-
tion recognition reasoning framework.
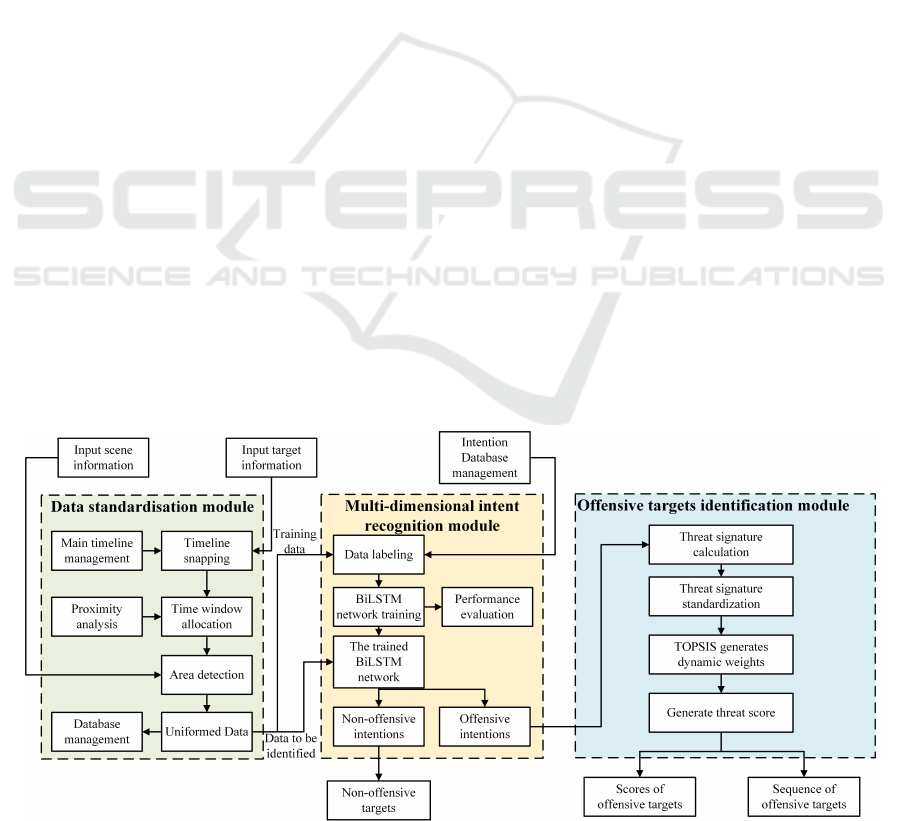
2.1 Framework Implementation
The proposed framework for countering drone inten-
tion recognition consists of three modules, as Fig. 2
shown. The Multi-dimensional intention recognition
module adopts a multi-dimensional temporal inten-
tion recognition method based on BiLSTM to iden-
tify the intention of the drone through serialized drone
feature information. It should be noted that there are
6 BiLSTM networks constructed in this paper, which
can be adaptively selected according to the different
Time windows of drone feature information to im-
prove the accuracy of drone intention recognition re-
sults. The network needs to be trained and tuned be-
fore applying the BiLSTM network. The serialized
feature information of the drone comes from the Data
standardization module. In this module, the origi-
nal information on the drone is processed by time-
line snapping, and the division of the time window
is solved according to the distance to closest point of
approach (DCPA) and the time of closest point of ap-
proach (TCPA) information of the drone and the re-
gional information where it is located. The Offen-
sive targets identification module analyzes, solves and
sorts the threat of offensive drone targets based on the
results of the intention recognition module.
2.2 Intention Space
Some typical drone intentions, such as pesticide
spraying and power line inspection, are related to
some specific movement patterns of drones and the
areas where their missions are located. Drone in-
tention recognition is the process of inferring and
predicting the target intention based on the target’s
feature information and intention recognition rules.
For a single drone target, the feature information re-
quired for its intention recognition over some time
can be represented by a multidimensional feature se-
quence (Y
t−n+1
, Y
t−n+2
, Y
t−n+3
, ··· , Y
t
), which de-
scribes the historical feature information of the tar-
get from time t − n + 1 to the current time t, and n is
the sequence length. Y
t
=
y
1
t
, y
2
t
, y
3
t
, ·· · , y
N
t
rep-
resents the features of a single target at time t, and the
number of features is N. Define its intention space as
M =
m
1
, m
2
, ·· · , m
|
M
|
, and its number of inten-
tions as
|
M
|
. Then, there is a mapping relationship:
m = f
Y →M
(Y
t−n+1
,Y
t−n+2
,Y
t−n+3
, ·· · ,Y
t
) ∈ M (1)
According to the scenario in Fig. 1 and the drone
feature information that can be obtained in the actual
anti-drone scenario, this paper established the target
Figure 2: System framework.
A Framework and Method for Intention Recognition to Counter Drones in Complex Decision-Making Environments
915
feature space Y =
y
1
, y
2
, y
3
, ·· · , y
7
and target in-
tention space M =
{
m
1
, m
2
, m
3
, m
4
}
as shown in Ta-
ble 1:
Table 1: Target feature space and intention space set.
Space Symbol Value
Feature Y
y
1
, y
2
, y
3
Position information
y
4
, y
5
, y
6
Velocity information
y
7
Area information
Intention M
m
1
Spraying
m
2
Orbit fly
m
3
Power lines inspection
m
4
Free flight
m
1
, m
2
, m
3
are characteristic intentions to per-
form specific tasks at specific locations. These targets
are considered to be non-offensive targets. Free flight
m
4
includes all intentions except m
1
, m
2
, m
3
, includ-
ing random flying targets with unfixed routes and of-
fensive targets. Therefore, it is necessary to conduct
a threat assessment on the targets with m
4
intentions
to further confirm whether to take disposal measures
against those targets and their disposal order.
3 METHODOLOGY
3.1 Multi-Dimensional Temporal
Intention Recognition Based on
BiLSTM
The motion trajectory of a drone is a continuous-time
segment, which can convey more information than
the state information at a single time point, and the
track characteristics and possible intentions of a drone
are more closely related to the motion trajectory of
the drone. Compared with traditional regression al-
gorithms, artificial recurrent neural networks (RNNs)
with memory functions can predict the characteris-
tic information of time series more accurately. (Teng
et al., 2021) transformed the target intention recogni-
tion problem into a multi-classification problem based
on time series recognition features. This paper uses
the BiLSTM model to train multi-dimensional time
series feature data. It uses a probability prediction
layer (softmax layer) and a classification output layer
to convert the output of the neural network into the
intention classification recognition result.
A single-layer BiLSTM is composed of two
LSTMs, one for processing the input sequence for-
ward and the other for processing the sequence back-
wards. After processing, the outputs of the two
LSTMs are concatenated to obtain the final BiLSTM
output result. While retaining the advantage of the
LSTM model in capturing the dependencies of data
over a long period, it solves the problem of being un-
able to encode information from the back to the front
(Siami-Namini et al., 2019). The manoeuvrability and
motion pattern of a drone is a features that can be in-
terpreted and judged forward and backward. There-
fore, using BiLSTM can extract the motion features
of the drone more accurately and identify the drone’s
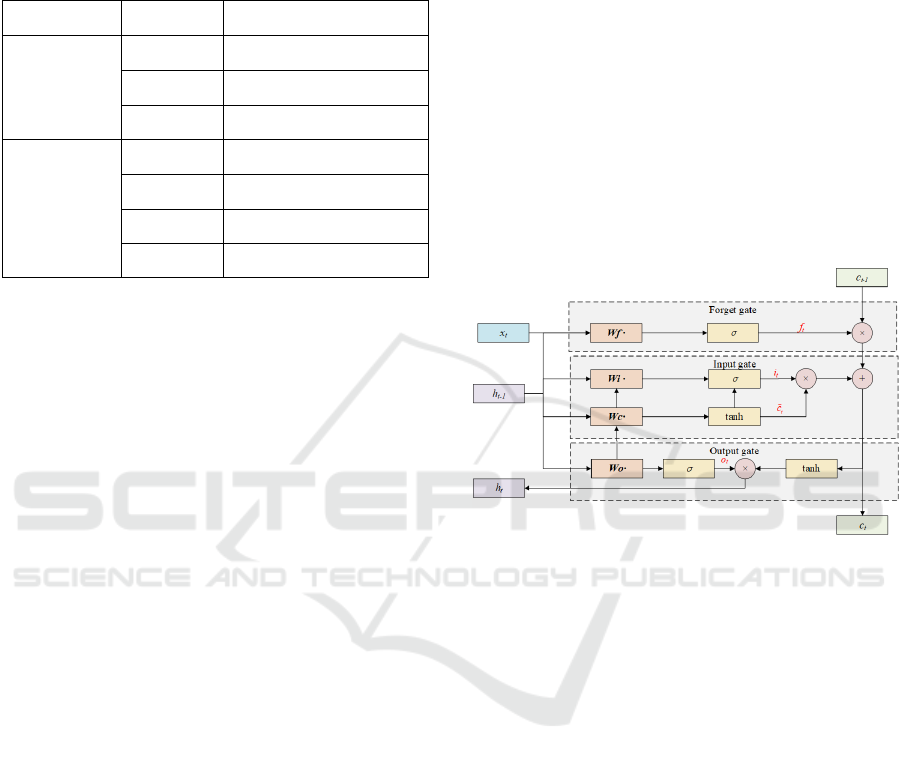
intentions more accurately. The LSTM model con-
sists of a forget gate, an input gate and an output gate.
Its structure at time t is shown in Fig. 3.
Figure 3: Structure of LSTM.
First, the forget gate can control which long-term
memories of the LSTM layer are forgotten:
f
t
= σ(W
f
x
t
+W
f
h
t−1
+ b
f
) (2)
The input gate then computes the information ob-
tained from the input:
i
t
= σ(W
i
x
t
+W h
t−1
+ b
i
)
˜c
t
= tanh(W
c
x
t
+W
c
h
t−1
+ b
c
)
c
t
= f
t
· c
t−1
+ i
t
· ˜c
t
(3)
Finally, the output gate updates the current hidden
layer state based on the input, the cell state, and the
previous hidden state:
o
t
= σ(W
o
x
t
+W
o
h
t−1
+ b
o
)
h
t
= o
t
· tanh c
t
(4)
Where W and b represent weight and bias terms,
respectively, and σ represents the sigmoid activation
function. f
t
, i
t
, o
t
are the results of the forget gate, in-
put gate and output gate, and c
t
is the variable trans-
fers the long-term memory.
This paper establishes a drone intention recogni-
tion method based on the BiLSTM network, as shown
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
916
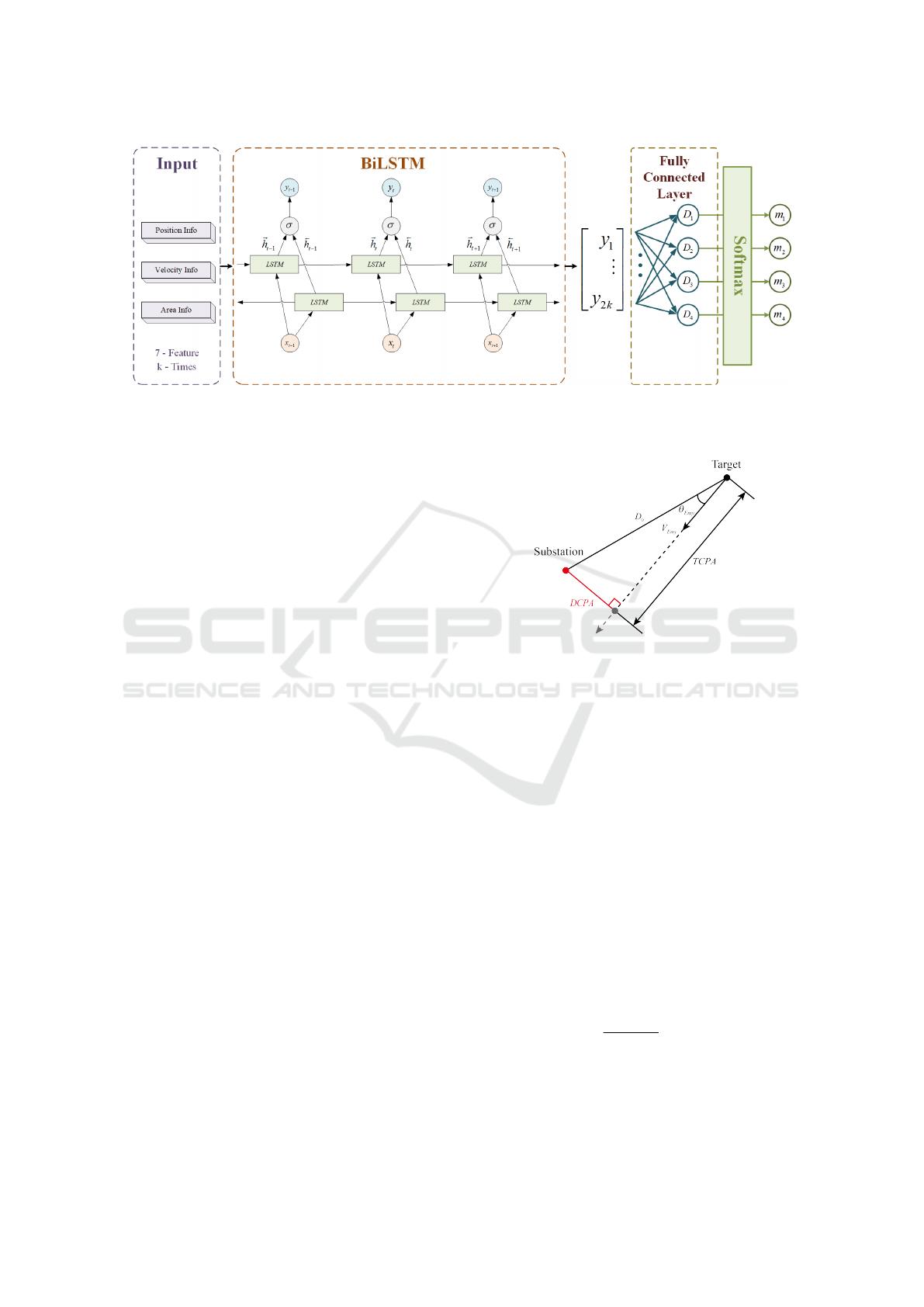
Figure 4: Schematic of Drones intention identification method based on BiLSTM.
in Fig. 4. The input layer of the network is the time
series features of the drone. Among them, k is the
time window, which determines the BiLSTM network
for the subsequent feature information input. There
are four types of intentions in the classification output
layer of the network, and their definitions are the same
as in Table 1. The feature information of the drone is
classified and predicted by the BiLSTM network, and
the targets with m
4
intention are screened out to fur-
ther determine whether they have attack intention.
3.2 Time Window Division and Threat
Ranking
The input to the BiLSTM network consists of a con-
tinuous feature sequence of the drone, which includes
attributes such as position, speed, region, and other
relevant features. The length of the time window, de-
noted as k, is a crucial parameter. Given the varia-
tions in region, flight speed, altitude, and heading of
the drone being analyzed, the length of the feature se-
quence necessary for accurately determining its inten-
tion can vary. Selecting an appropriate time window
k can significantly enhance the efficiency of drone in-
tention recognition while minimizing the consump-
tion of computing resources. It is worth noting that
offensive targets often have the characteristics of high
speed and clear direction. The time from discovering
the target to disposing of the target is short. Selecting
a smaller time window can identify the drone’s attack
intention more quickly.
To determine whether the target has an attack in-
tention, this paper selects three typical motion fea-
tures as the basis for target threat calculation and
ranking, namely, DCPA between the target and the
substation, TCPA and target height. Among them,
drones with lower flying altitudes are more concealed
and switch to attack behaviour faster and can be used
as a supplementary factor in target threat calculations.
Figure 5: Schematic of DCPA and TCPA.
Fig. 5 shows the definitions of DCPA and TCPA,
where the red dot represents the centre position of the
substation, the black dot is the moving target, the tar-
get speed is V
Emy
, and the angle between the target
speed and the target relative to the substation is θ
Emy
.
The distance between the target and the substation
during movement can be expressed by Eq. (5).
D(t) =
V
2
Emy
− 2V
Emy
cosθ
Emy
t
2
+ 2 (V
Emy
cosθ
Emy
)D
0
t + D
2
0
(5)
According to Eq. (5), the expressions of DCPA
and TCPA can be obtained as shown in Eq. (8)
and Eq. (9).
DCPA =
D
0
cosθ
Emy
< 0
D
0
sinθ
Emy
cosθ
Emy
≥ 0
(6)
TCPA =
(
0 cosθ
Emy
< 0
D
0
cosθ
Emy
V
Emy
cosθ
Emy
≥ 0
(7)
Finally, the DCPA, TCPA, and height indicators
of the target are normalized to obtain the threat grade
of each indicator.
A Framework and Method for Intention Recognition to Counter Drones in Complex Decision-Making Environments
917
ξ
D
(D) = 1 −
DCPA
¯
D
(8)
ξ
T
(T ) =
T
2
TCPA
2
+ T
2
(9)
ξ
H
(H) =
H
2
H
2
+ H
2
(10)
¯
D,
¯
T ,
¯
H are the normalized units of DPCA, TCPA,
and H.Set W and Q as the evaluation standard of the
time window and the threat assessment model. The
expression of W and Q can be written as:
W =
1
2
[ξ
D
(D) + ξ
T
(T )] (11)
Q =
1
3
[ξ
D
(D) + ξ
T
(T ) + ξ
H
(H)] (12)
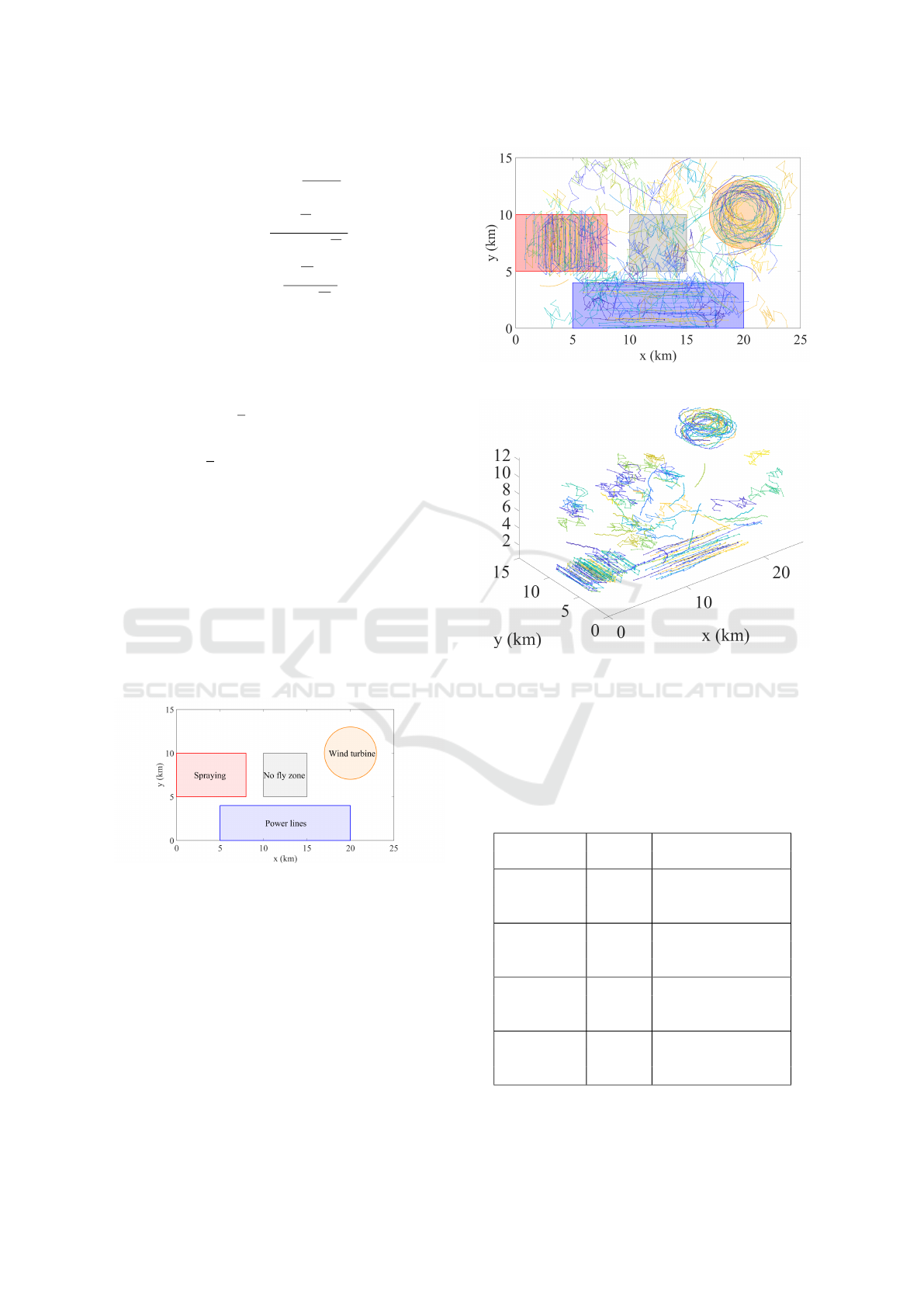
4 SIMULATION EXPERIMENTS
4.1 Simulation Scenario
To verify the feasibility of the intention recognition
method and the correctness of the recognition results,
we designed the actual scene of Fig. 1 as a two-
dimensional plane scene as shown in Fig. 6. The
whole scene contains four areas: the Spraying zone,
No fly zone, Wind turbine zone and Power lines zone.
Figure 6: Experimental scenario description.
To clearly illustrate the trajectory of the drone,
100 drone targets were selected at random. The two-
dimensional and three-dimensional position diagrams
of these targets are displayed in Fig. 7 and Fig. 8.
4.2 Dataset Generation and Time
Window Division
This paper presents a dataset consisting of 3,000
batches of drone targets, categorized by their intended
purposes. The dataset includes 500 batches intended
for spraying, 500 batches for orbit fly, 500 batches for
Figure 7: Horizontal trajectory of drones.
Figure 8: Three-dimensional flight trajectory of drones.
power lines inspection, and 1,000 batches designated
for free flight. A detailed breakdown of the dataset
can be found in Table 2. The 3,000 sets of drone
flight data were divided into training and validation
sets in a 9:1 ratio to facilitate the development and
evaluation of the intention recognition model.
Table 2: Dataset detailed description.
Intention M
Dataset
Description
size
Spraying 500
Flying in an
S-shaped trajectory
around farmland
Orbit fly 500
Surrounding wind
turbines for
inspection work
Power lines
500
Movement along
inspection the power
line direction
Free flight 1,000
Without the above
three moving
characteristics
Calculate W for each target using the Eq. (11),
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
918

then divide the 3000 batches of targets into time win-
dows according to the rules in Table 3. The six data
sets, divided by time windows, are input into the BiL-
STM network for training and tuning. This process
results in a prediction classification network for each
time window, which identifies the intention of the
drones.
Table 3: Time Window division results.
W
Dataset Time
Intention type
size Window
(0.8 , 1] 583 5 s m
1
, m
2
, m
3
, m
4
(0.6 , 0.8] 538 10 s m
1
, m
2
, m
3
(0.4 , 0.6] 369 15 s m
1
, m
2
, m
3
(0.3 , 0.4] 183 20 s m
1
, m
2
, m
3
(0.2 , 0.3] 552 25 s m
1
, m
2
, m
3
, m
4
[0 , 0.2] 285 30 s m
1
, m
2
, m
3
, m
4
4.3 BiLSTM and Threat Ranking
The recognition model shown in Fig. 4 is set for six
time periods, respectively. The time window length
determines the sequence length of the input layer and
the BiLSTM output, and the number of input and out-
put nodes of the fully connected layer and the softmax
layer is determined by the total number of intentions
in Table 3.
Table 4 shows the experiment’s training environ-
ment and parameter settings based on the BiLSTM
network constructed in this paper.
Table 4: Training environment and parameters.
Training parameters Value
Environment Intel Core i7-13650HX
Optimizer ADAM
Learning rate 0.001
Hidden units of LSTM 100
Max epochs 100
Min batch size 25
Gradient threshold 1.0
The data set is trained according to the time win-
dow from short to long, and the accuracy curve and
loss function curve of the intention recognition net-
work under each time window are obtained as shown
in Fig. 9 and Fig. 10.
We can observe that as the time window increases,
more motion features are preserved, leading to a faster
training convergence speed, higher training accuracy,
and a loss function that approaches zero. Addition-
ally, since there are only three intentions to identify
when k = 10, 15, 20, the convergence for these three
time windows is further enhanced.
Figure 9: Accuracy curve of the training.
Figure 10: Loss curve of the training.
Subsequently, the validation set is used to test the
accuracy of the intention recognition network, and the
threat score of the validation set is calculated using
Eq. (12) to obtain the recognition accuracy and av-
erage threat value of each validation set as shown in
Table 5.
Table 5: Training results and average threat value.
Time Training Accuracy of Average
window time validation threat value
5 s 19 s 0.9655 0.8659
10 s 23 s 1.0000 0.5808
15 s 20 s 1.0000 0.5627
20 s 14 s 1.0000 0.5306
25 s 39 s 0.9818 0.5796
30 s 76 s 0.9643 0.3569
From Table 5, we can see that for the k = 5, 25, 30
time windows containing four intentions targets, the
accuracy of intention recognition is above 96%, and
the shorter the time window, the higher the final threat
score. For the k = 10, 15, 20 time windows containing
three intentions targets, the training time is shorter,
the recognition accuracy reaches 100%, and the final
threat score is relatively average.
5 CONCLUSION
This paper aims to solve the problem of drone de-
fence in complex decision-making environments. It
constructs an intention space model to establish the
A Framework and Method for Intention Recognition to Counter Drones in Complex Decision-Making Environments
919

connection between target motion characteristics, re-
gional information, and target intentions so as to
test the ability of intelligent algorithms to recog-
nize multi-dimensional intentions in complex envi-
ronments. In addition, the dynamic time window
adaptation proposed in this paper dynamically ad-
justs the time window of the BiLSTM network based
on motion rules and the principle of reserving suf-
ficient disposal time while ensuring rapid intention
recognition of high-threat targets and accurate inten-
tion recognition of medium-threat and low-threat tar-
gets. Finally, based on a multi-dimensional intention
dataset for complex decision-making environments,
window division and intention recognition were per-
formed based on BiLSTM and dynamic time window
adaptation, verifying that the dynamic time window
can be dynamically processed while ensuring the ac-
curacy of intention recognition.
In future work, we would like to take the drones’
types and features that can be obtained in reality to
expand the feature space set. By establishing time
window division rules and threat ranking indicators
for different types of drones, we can make full use of
detectable information for faster and more accurate
intention recognition. How to dynamically adjust the
time window division and feature selection according
to the comprehensive motion state of all targets is also
an important direction for future work. In addition,
we would like to expand the intention space set based
on more realistic complex decision-making environ-
ments, using manual reasoning and system-derived
methods so that the system can more accurately iden-
tify the intentions of multiple types of targets in more
real scenarios.
REFERENCES
Cai, Z., Wang, Y., Jiang, Q., Gui, G., and Sha, J. (2024). To-
ward intelligent lightweight and efficient uav identifi-
cation with rf fingerprinting. IEEE Internet of Things
Journal.
Fraser, B., Perrusqu
´
ıa, A., Panagiotakopoulos, D., and Guo,
W. (2023). A deep mixture of experts network for
drone trajectory intent classification and prediction us-
ing non-cooperative radar data. In 2023 IEEE Sym-
posium Series on Computational Intelligence (SSCI),
pages 1–6. IEEE.
Kaza, K., Mehta, V., Azad, H., Bolic, M., and Mantegh, I.
(2024). An intent modeling and inference framework
for autonomous and remotely piloted aerial systems.
arXiv preprint arXiv:2409.08472.
Liang, J., Ahmad, B. I., Jahangir, M., and Godsill,
S. (2021). Detection of malicious intent in non-
cooperative drone surveillance. In 2021 Sensor Signal
Processing for Defence Conference (SSPD), pages 1–
5. IEEE.
Lof
`
u, D., Di Gennaro, P., Tedeschi, P., Di Noia, T., and
Di Sciascio, E. (2023). Uranus: Radio frequency
tracking, classification and identification of unmanned
aircraft vehicles. IEEE Open Journal of Vehicular
Technology.
Siami-Namini, S., Tavakoli, N., and Namin, A. S. (2019).
The performance of lstm and bilstm in forecasting
time series. In 2019 IEEE International Conference
on Big Data (Big Data), pages 3285–3292.
Teng, F., Guo, X., Song, Y., and Wang, G. (2021). An air
target tactical intention recognition model based on
bidirectional gru with attention mechanism. IEEE Ac-
cess, 9:169122–169134.
Wang, C., Meng, L., Gao, Q., Wang, T., Wang, J., and
Wang, L. (2024). A target sensing and visual track-
ing method for countering unmanned aerial vehicle
swarm. IEEE Sensors Journal.
Xue, C., Li, T., and Li, Y. (2024). Radio frequency based
distributed system for noncooperative uav classifica-
tion and positioning. Journal of Information and In-
telligence, 2(1):42–51.
Yang, Y., Yang, F., Sun, L., Xiang, T., and Lv, P. (2023).
Echoformer: Transformer architecture based on radar
echo characteristics for uav detection. IEEE Sensors
Journal, 23(8):8639–8653.
Yi, P., Yang, Y., and Lin, Z. (2024). Cooperative opponent
intention recognition based on trajectory analysis by
distributed fractional bayesian inference. In 2024 6th
International Conference on Electronic Engineering
and Informatics (EEI), pages 1551–1555. IEEE.
Yun, J., Anderson, D., and Fioranelli, F. (2023a). Estima-
tion of drone intention using trajectory frequency de-
fined in radar’s measurement phase planes. IET Radar,
Sonar & Navigation, 17(9):1327–1341.
Yun, J., Shin, H.-S., and Tsourdos, A. (2023b). Perime-
ter intrusion prediction method using trajectory fre-
quency and naive bayes classifier. In 2023 23rd In-
ternational Conference on Control, Automation and
Systems (ICCAS), pages 1610–1615. IEEE.
Zhang, H., Li, T., Li, Y., Li, J., Dobre, O. A., and Wen,
Z. (2023). Rf-based drone classification under com-
plex electromagnetic environments using deep learn-
ing. IEEE Sensors Journal, 23(6):6099–6108.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
920
