
Combining Goal and Process Models for the Specification of
Human-Robot Collaborations
Shaza Elbishbishy
a
, Jeshwitha Jesus Raja
b
, Philipp Kranz
c
and Marian Daun
d
Center for Robotics, Technical University of Applied Sciences W
¨
urzburg-Schweinfurt, Schweinfurt, Germany
Keywords:
Process Modeling, Goal Modeling, BPMN, Human-Robot Collaboration.
Abstract:
Human-Robot collaboration enhances flexibility and efficiency in modern manufacturing. Collaborative robots
work alongside human operators to combine robotic precision with human adaptability. A key challenge is
defining task sequences, managing dependencies, and aligning workflows with strategic goals. This paper
addresses this challenge by integrating goal models with process models. Goal models capture the “why,”
while process models define the “how” in operational workflows. Our approach systematically maps goals to
tasks, ensuring clear traceability and cohesive task execution. We evaluate this method through a collaborative
assembly use case. The integration refines task dependencies, improves coordination, and ensures alignment
between goals and processes. This approach supports efficient human-robot collaboration in semi-automated
manufacturing environments.
1 INTRODUCTION
Collaborative robots (cobots) play a key role in mak-
ing manufacturing processes flexible. They work
alongside other robotic systems to replace parts of
traditional production lines and improve efficiency.
Cobots are cost-effective and adaptable, enabling
Human-Robot Collaboration (HRC) to meet specific
manufacturing needs (Grau et al., 2020). Cobots are
ideal for small batch sizes, where full automation is
too expensive and inefficient. In such cases, semi-
automated setups, where humans and cobots share
tasks, provide a practical solution. This approach
combines human adaptability with robotic precision
to reduce costs and improve flexibility.
In HRC, human operators and cobots operate in
close proximity. They work in parallel or simultane-
ously on the same tasks (Wang et al., 2020). Cobots
assist by handing parts to human operators, or hold-
ing parts in position (Vysocky and Novak, 2016). Hu-
mans, on the other hand, contribute to more complex
tasks that are difficult to automate (Weiss et al., 2021).
It is crucial to plan this interaction in an early de-
velopment phase to ensure that the cobot can work
a
https://orcid.org/0009-0002-0975-272X
b
https://orcid.org/0009-0008-7886-7081
c
https://orcid.org/0000-0002-1057-4273
d
https://orcid.org/0000-0002-9156-9731
alongside the human safely and achieve all intended
goals. To support this, model-based approaches pro-
vide structured methods for analyzing and specifying
such collaborations. These approaches have already
proven valuable in domains like industrial automa-
tion, automotive, and avionics (Est
´
evez and Marcos,
2011; B
¨
ohm et al., 2021), where complex systems re-
quire early planning and clear task definitions to en-
sure success.
Goal modeling is an established approach in re-
quirements engineering (Van Lamsweerde, 2001). It
allows the analysis of goal fulfillment and conflicts
among stakeholders and helps in understanding goals
(hard goals), tasks, dependencies, and interactions
between different systems (Horkoff and Yu, 2011).
While goal modeling is useful in HRC (Daun et al.,
2019), it lacks a clear description of the process logic
in the interaction between human and cobot. In prod-
uct assembly, the cobot and human operator have dis-
tinct tasks, some of which are interdependent while
others can be performed independently. However,
they must be performed in a specific order, which sig-
nificantly impacts the success of the collaboration.
For example, in an assembly process, the cobot
might pick and place parts, but the human operator
can only proceed with the next step (like screwing
parts together) once the parts are correctly placed. If
the cobot places a part out of order or incorrectly, the
human operator’s task may be delayed or need to be
Elbishbishy, S., Jesus Raja, J., Kranz, P. and Daun, M.
Combining Goal and Process Models for the Specification of Human-Robot Collaborations.
DOI: 10.5220/0013432200003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 217-228
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
217

repeated. Therefore, it is crucial to define and manage
the task sequence early in the development. This en-
sures the process logic is clear and that the tasks align
with the collaboration’s goals.
In this paper, we propose an integrated approach
that derives a process model directly from the goal
model of a Human-Robot Collaborative Assembly
(HRCA) process. We adopt a transformation method-
ology adapted from (Ortiz et al., 2024), systemati-
cally mapping the elements of goal models to con-
structs in process models (Business Process Model
and Notation (BPMN)). This creates a clear and di-
rect traceability between high-level strategic goals
and their operational task execution within the pro-
cess flow. By applying this approach to a use case of
toy truck assembly, we demonstrate its effectiveness
in specifying human-robot task dependencies, refin-
ing process steps, and ensuring cohesive task coordi-
nation. Thereby, this paper contributes an investiga-
tion into whether integrating goal models with BPMN
improves the specification and management of HRCA
by aligning strategic goals (“why”) with operational
workflows (“how”). Through our evaluation, we an-
alyze the extent to which the integrated models fa-
cilitate better goal fulfillment, task traceability, and
collaboration efficiency in semi-automated manufac-
turing environments.
Section 2 introduces works related to the concepts
of the manufacturing industry and HRC, as well as
model-based engineering and model integration. Sec-
tion 3 then presents our three-stage approach, which
begins with defining the objectives of an HRCA using
a goal model. This is followed by deriving a BPMN
from the goal model with the assistance of a trans-
formation table and then refining it. The approach is
evaluated in Section 4 with a case example, the as-
sembly of a toy truck. Finally, Section 5 concludes
the paper and outlines future work.
2 RELATED WORK
In recent years, cobots have become integral to flexi-
ble manufacturing, designed to interact with humans
without safety barriers or protective cages (Matheson
et al., 2019). While cobots offer the flexibility for
quick, cost-effective layout changes, their effective
deployment requires a deep understanding of their
characteristics, which can be a barrier to widespread
industry adoption. Key challenges include organiz-
ing teamwork, facilitating autonomous decisions, and
balancing autonomy with human oversight in tasks re-
quiring conscious judgment (Kem
´
eny et al., 2021).
2.1 Modeling Human-Robot
Collaborations with Goal and
Process Models
To establish safe and reliable HRC, a proper defini-
tion and analysis of HRC is needed in early stages
of development. Therefore, goal modeling has been
shown to be an adequate approach for modeling col-
laborative systems and has been successfully applied
to HRC as well (Daun et al., 2019). In previous work,
we have shown that goal models can particularly be
used to identify and model high-level safety hazards
of the collaboration (Manjunath et al., 2024), and to
define digital twins of robotic systems (Jesus Raja
et al., 2024). In addition, process information is cru-
cial for managing cooperation with cobots (Cherubini
et al., 2016), and are a vital basis for defining coor-
dinated behaviors between multiple actors (Corradini
et al., 2023; Bourr et al., 2021), as well as for ensur-
ing safety in the process (Kranz et al., 2024). How-
ever, these models often focus on later development
phases and may overlook specific HRC dynamics, as
BPMN primarily emphasizes operational aspects over
goal rationales (Ponsard and Darimont, 2019).
Goal and process models play complementary
roles in improving task coordination and efficiency
in HRC. The HRC approach demonstrates how
goal models define strategic objectives, while pro-
cess models represent the operational workflows to
achieve them. The integration of the two ensures that
high-level goals are directly linked to task-level ac-
tivities, enabling effective collaboration between hu-
mans and robots (Lestingi and Longoni, 2016).
Chen et al. use process models to detail task
sequences and dependencies, while goal models de-
termine optimal task allocation between human and
robotic agents (Chen et al., 2011). This ensures that
each task contributes directly to the overall goal and
balances workload effectively. Similarly, another ap-
proach highlights how goal models capture collabo-
ration objectives and process models define the se-
quences and interactions necessary for their execu-
tion. This integration facilitates smooth transitions
between tasks and clarifies roles and responsibilities
(Malik and Bilberg, 2019).
A systematic review emphasizes the importance of
integrating goal models to represent long-term goals
and process models to outline detailed steps required
to achieve these goals. This combined approach al-
lows for better planning and coordination in shared
human-robot workspaces, particularly in scenarios in-
volving dynamic and complex workflows (Sim
˜
oes
et al., 2022). These studies highlight how goal mod-
els define “what needs to be achieved,” while process
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
218

models specify “how tasks are executed,” enabling ef-
fective management of HRCA in industrial environ-
ments.
2.2 Combining Goal and Process
Models
Combining goal models and process models provides
complementary perspectives, offering a more detailed
understanding of system requirements (Amyot et al.,
2022). Approaches like User Requirements Nota-
tion (URN), which integrate goal modeling with pro-
cess modeling, have been applied in various domains,
though they often require adaptation for specific in-
dustries (Daniel Amyot, 2022; Chen, 2007). More re-
cent work by Ortiz et al. (Ortiz et al., 2024) incorpo-
rates goal-oriented modeling with BPMN for micro-
service compositions, ensuring alignment with busi-
ness goals through the modification of processes.
The URN, standardized by the International
Telecommunication Union (ITU-T) in 2008 with im-
proved versions in 2012 and 2018, combines goal
modeling with process modeling, offering both a
graphical and a textual syntax(Daniel Amyot, 2022).
URN facilitates leveraging social modeling in process
design and improvement efforts. Chen et al. proposed
an approach utilizing URN to model goals and pro-
cesses, incorporating key performance indicator mod-
els and integrating a business intelligence tool to mon-
itor and measure business processes, with a focus on
healthcare (Chen, 2007). However, its applicability
beyond healthcare is limited, and it requires adap-
tation for broader business process evaluation. Or-
tiz et al. (Ortiz et al., 2024) introduces an approach
that represents goals in BPMN pools using collapsed
BPMN sub-processes and enables independent devel-
opment and modification of micro-services by trans-
forming Tropos diagrams into structured BPMN dia-
grams, ensuring alignment with business goals.
While URN has seen numerous applications in
academia and industry, additional efforts and edu-
cational initiatives are necessary for broader main-
stream adoption. Customization to specific domains
proves valuable, enabling the use of domain-specific
terminology and syntax, as well as the development
of reusable assets (Daniel Amyot, 2022). The works
discussed above primarily focus on specific domains,
such as health and business. In contrast, our paper
centers on industry automation, particularly in the
context of HRCA.
3 PROPOSED APPROACH
A combination of goal and process models facilitates
a coherent interconnection between the overarching
objectives of the goal model and the intricate process
tasks of the process model. We use the goal-oriented
requirements language (GRL) to specify goals of the
HRCA, as GRL has already been proven useful for
HRC (e.g., (Daun et al., 2023)). For process mod-
els, we rely on BPMN as it is a commonly used lan-
guage, and also has already been successfully applied
in HRC (e.g., (Fernandes et al., 2021)). By map-
ping the notations of GRL and BPMN specifically
for HRCA, we ensure that both models are consistent
with one another.
A goal model can be employed to illustrate the
overarching strategic objectives of an HRCA process,
as well as the subordinate sub-objectives that must be
accomplished in order to attain the respective overar-
ching goal. Such sub-goals may be defined as hard
goals, such as the assembly of sub-assemblies, which
are necessary for the completion of the overall goal
of assembling the finished product. Moreover, soft
goals, such as safe assembly, can also be defined. To
prevent the target models from becoming too com-
plicated, they are often limited to a relatively short
description of the tasks (hard goal ”assembly of sub-
assemblies”, but not the individual steps required for
this). In BPMN, the chronological process flow of
HRCA can be represented in greater detail, with the
option of including individual assembly steps.
Our approach is based on the work of (Ortiz et al.,
2024), who integrate goal models with BPMN. In this
work, we adopt this integrated approach to specify
and manage HRCA, where a human operator and a
cobot perform complementary tasks. The procedure
for transforming a goal model to a BPMN is as fol-
lows:
1. A goal model is created for the overarching goals
of the assembly process, as well as the necessary
soft goals.
2. A first version of the BPMN is then created based
on the transformation table in Figure 2, which is
consistent with the previously created goal model.
3. The BPMN is refined by further specifying tasks.
In our current version, only hard goals are trans-
ferred from goal models to BPMNs. These objectives,
which are tasks within the goal model, are also the
main components of a process flow and can therefore
be transferred with minimal effort. In contrast, ‘soft
goals’ are characterized by their heterogeneity, which
poses a challenge in the standardization of their inte-
gration into a process model.
Combining Goal and Process Models for the Specification of Human-Robot Collaborations
219

3.1 Definition of HRCA Goals with
Goal Models
A goal model is a framework used to represent high-
level objectives and strategic goals within a system.
It decomposes these objectives into smaller sub-goals
and tasks, aligning the system’s actions with the de-
sired outcomes. Goal models are instrumental in cap-
turing the broad goals of HRCA and breaking them
down into specific tasks that human operators and
robots need to execute to achieve the intended goals.
These models help ensure that each task performed,
whether by the human or the cobot, is contributing
towards achieving the overarching goal.
The elements of a goal model for HRCA are:
• Actors: Usually the human and the cobot work-
ing together on the assembly. Furthermore, the
system may be expanded to include additional ac-
tors, such as other tools or machines, or multiple
humans or cobots.
• Goals: High-level objectives that represent the
desired outcomes, such as “Assemble Final Prod-
uct.”
• Sub-Goals: Defined as hard goals, these are more
specific objectives that support high-level goals,
such as “Prepare Sub-Assembly”.
• Soft Goals: Qualitative objectives, such as “Min-
imize Errors” or “Maximize Efficiency,” that in-
fluence multiple tasks.
• Tasks: A breakdown of high-level goals into
smaller, actionable items performed by the actors
cobot and human.
• Self-Dependencies: Dependencies between two
tasks or goals of an actor.
• Dependencies: The interdependence between
two tasks or goals undertaken by different actors.
Such dependencies may be either unidirectional,
pertaining to assembly sequence dependencies, or
bidirectional, denoting collaboration between hu-
man and cobot.
In HRCA, the goal model provides a structured
approach for ensuring that the tasks performed by hu-
man operators and cobots align with the broader goals
of the system. It helps articulate the overall purpose of
the collaboration and ensures each action contributes
to achieving that purpose.
The first step in our approach is to create a goal
model that represents the high-level objectives and
their decomposition into sub-goals and tasks. The
goal model identifies the strategic objectives of the
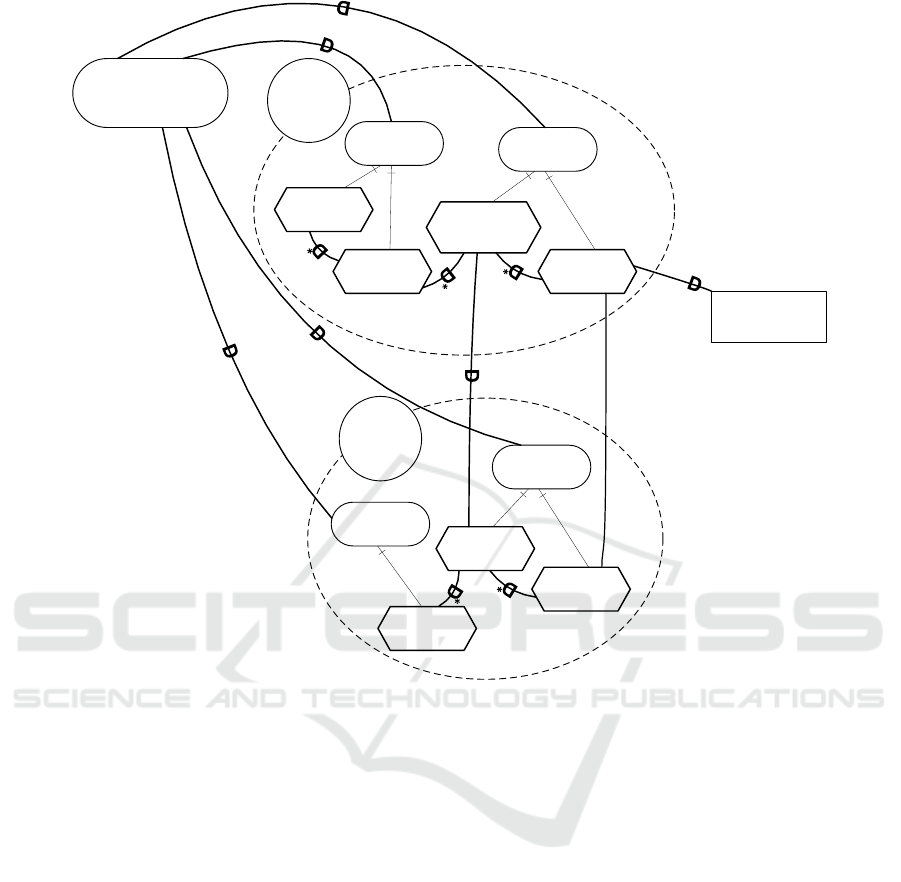
assembly process and links these objectives with the
Cobot
Actor
Human Goal
Cobot Goal
Task A1
Task A2
Task B1
Task B2
*
AND
D
D
AND
*
Human
Actor
Figure 1: Goal Model of a typical HRCA, showing human
and cobot as actors, their specific goals and the dependen-
cies between the tasks.
tasks that need to be performed by the human operator
and the cobot.
Figure 1 shows an example of a typical HRCA.
The scenario under consideration comprises two ac-
tors, namely the Human Actor and the Cobot Actor.
Furthermore, a superordinate goal is set, the Assem-
bly of the final product. This goal is broken down
into two sub-goals, one for the human actor and one
for the cobot. The aforementioned sub-goals are then
subdivided into discrete tasks, designated Task A1 and
Task A2 for the human actor and Task B1 and Task B2
for the cobot. Moreover, soft goals are defined at the
sub-goal level. Task A2 is dependent on Task A1, just
as Task B2 is dependent on Task B1. The completion
of the cobot’s Task B1 is dependent on the completion
of the human’s Task A2. As the dependency is unidi-
rectional, it is a result of the assembly sequence of the
two tasks.
The goal model also considers soft goals that can-
not be explicitly quantified but influence the overall
collaboration process, such as “Minimize Errors” and
“Maximize Efficiency”. These goals guide the design
of tasks and help to ensure that the collaboration re-
mains effective and smooth.
3.2 Deriving a Process Model from the
Goal Model
Figure 2 illustrates the correspondence between the
notations of goal models and BPMNs. Our approach
has been informed by the work of Ortiz et al. (Ortiz
et al., 2024), which we have adapted and expanded
to encompass the mapping of additional relevant no-
tations for HRCA. The aforementioned table allows
for the derivation of BPMNs from the previously cre-
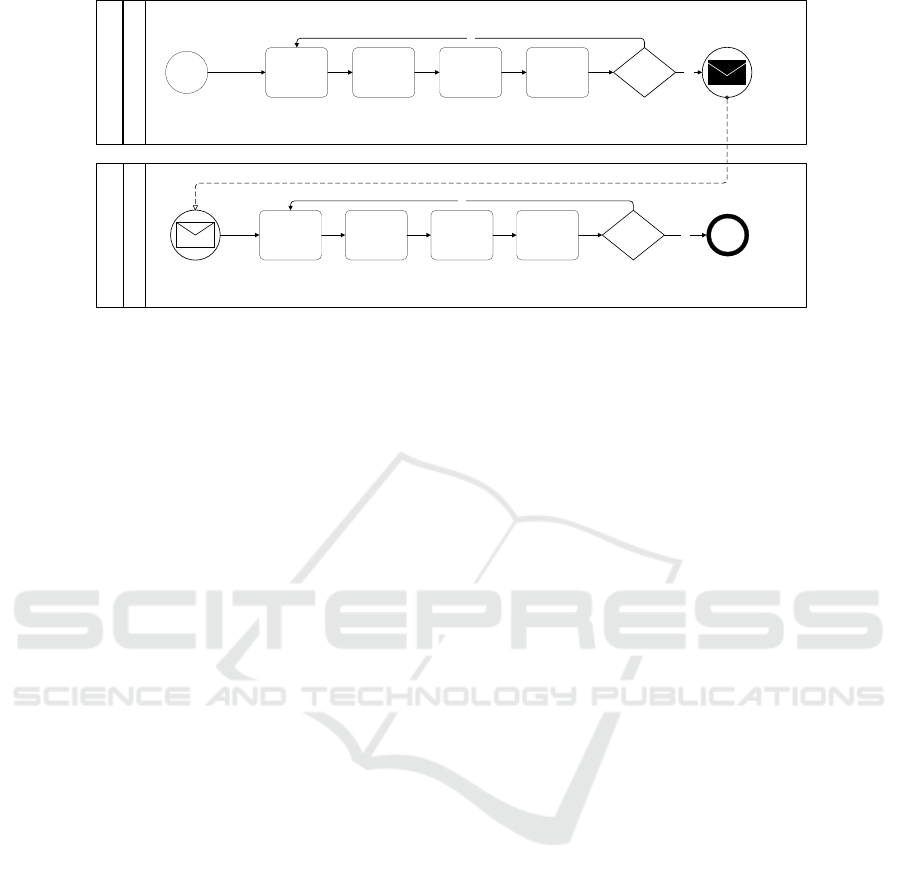
ated goal models. Figure 3 illustrates the BPMN de-
rived from the goal model depicted in Figure 1. The
initial step is to create a pool in the BPMN for each
actor present in the goal model, which includes both
Human Actor and Cobot Actor. Subsequently, the
goals are translated into sub-pools, namely the Hu-
man Goal and the Cobot Goal. The tasks of the
goal model are transformed into collapsed BPMN
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
220
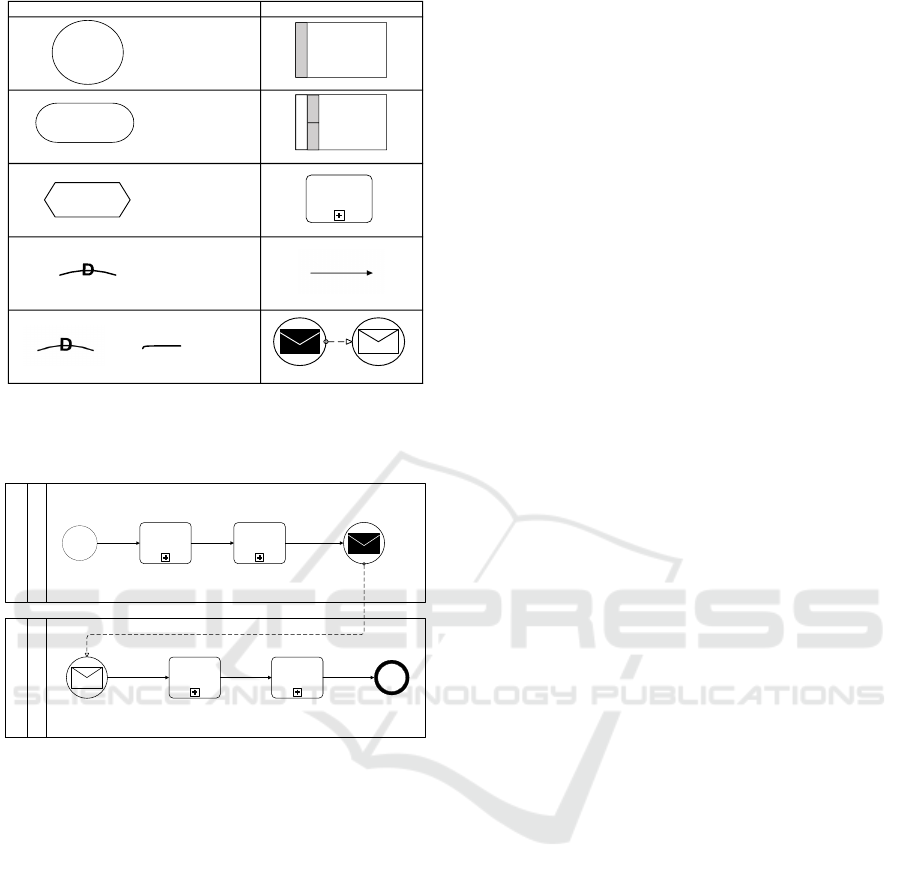
GRL Goal Model Notation
BPMN Notation
Actor Pool
Goal Sub-pool
Task Activity
Self - Depedency Sequence flows
Unidirectional and Bidirectional Dependency Send and receive message
*
D
D
Figure 2: Transformation table to transform goal models
into BPMNs. The mapping was adapted from (Ortiz et al.,
2024) and extended to fit the purposes of HRCA.
Human
Cobot
Human Goal
Cobot Goal
Task A1 Task A2
Task B1 Task B2
Start
End
Send Message
Receive message
Figure 3: BPMN derived from a goal model.
sub-processes, designated as Tasks A1, A2 and Tasks
B1, B2. In the mapping of goals and tasks, we di-
verge from the approach proposed by Ortiz et al., who
map goals to BPMN sub-processes without consider-
ing tasks. The sequence flows of the BPMN result
from self-dependencies within the goal model (for ex-
ample, Task A2 is dependent on Task A1). Dependen-
cies between two different actors are represented ac-
cording to the mapping of Ortiz et al., with connected
send and receive messages based on the type of de-
pendency (for example, Task B1 is dependent on Task
A2).
The transformation of the goal model to the
BPMN creates a direct mapping between high-level
goals and operational tasks in the BPMN diagram.
This framework ensures coherence and allows for
seamless real-time coordination between strategic
goals and operational tasks.
3.3 Refining the Process Model
BPMN is a widely used graphical language designed
to represent the sequence and flow of tasks within a
business or operational process. It provides a stan-
dardized way to model business processes, including
task sequences, roles (human, robot), decision points,
and interactions between process participants. In the
context of HRCA, BPMN serves as an adequate tool
for detailing the specific tasks, decision points, and
dependencies that exist between the human operator
and the cobot, ensuring smooth coordination and col-
laboration.
While goal models provide the high-level objec-
tives of the collaboration, BPMN helps translate these
strategic goals into a task flow, representing how those
goals are achieved in practice. It captures the tasks
performed by both the human and cobot actors, spec-
ifying the order of execution and how these tasks in-
terrelate.
In the third and final step of our approach, we
undertake a further refinement of the BPMN model
derived from the goal model, defining the collapsed
tasks with greater precision. This is done by elabo-
rating on high-level tasks (e.g., A1, A2, B1 and B2)
and refining them into their corresponding low-level
subtasks (e.g., A1.1, A1.2, A2.1, A2.1, B1.1, B1.2,
B2.1, B2.2). This enables the HRCA process flow to
be described in a highly defined manner, encompass-
ing tasks and intricate interactions. The link with the
goal model is still in place, enabling conclusions to be
drawn from the very precisely defined tasks and pro-
cesses via their collapsed tasks back to the superordi-
nate objectives of the goal model without overloading
the goal model itself with these.
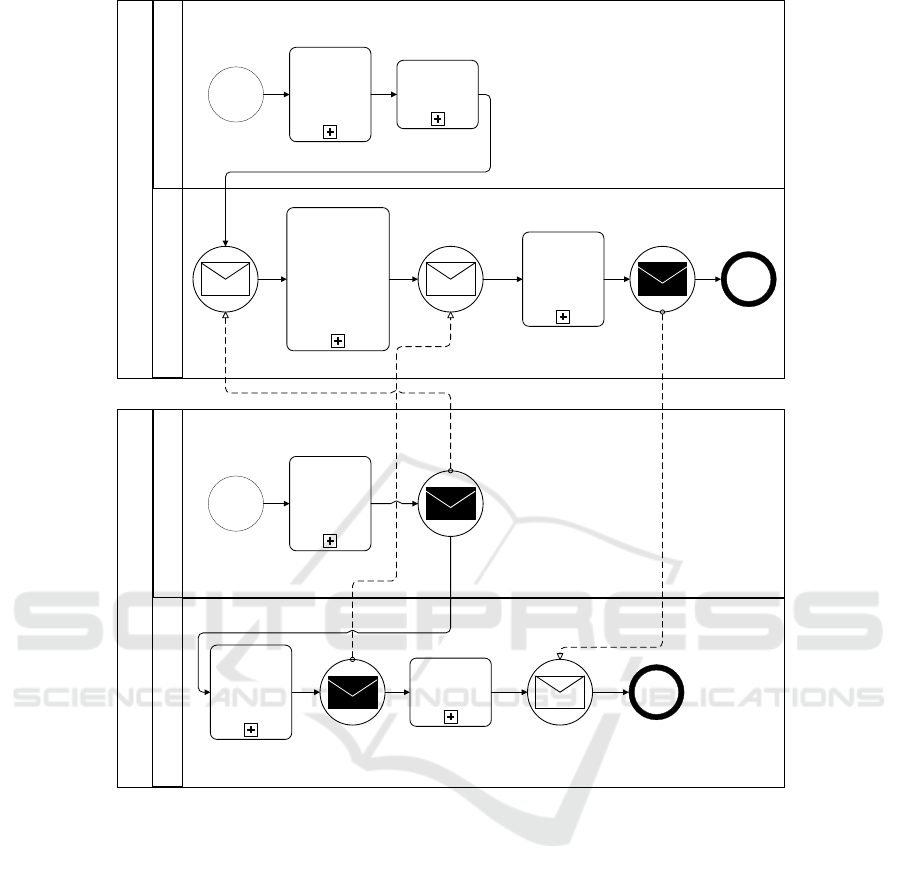
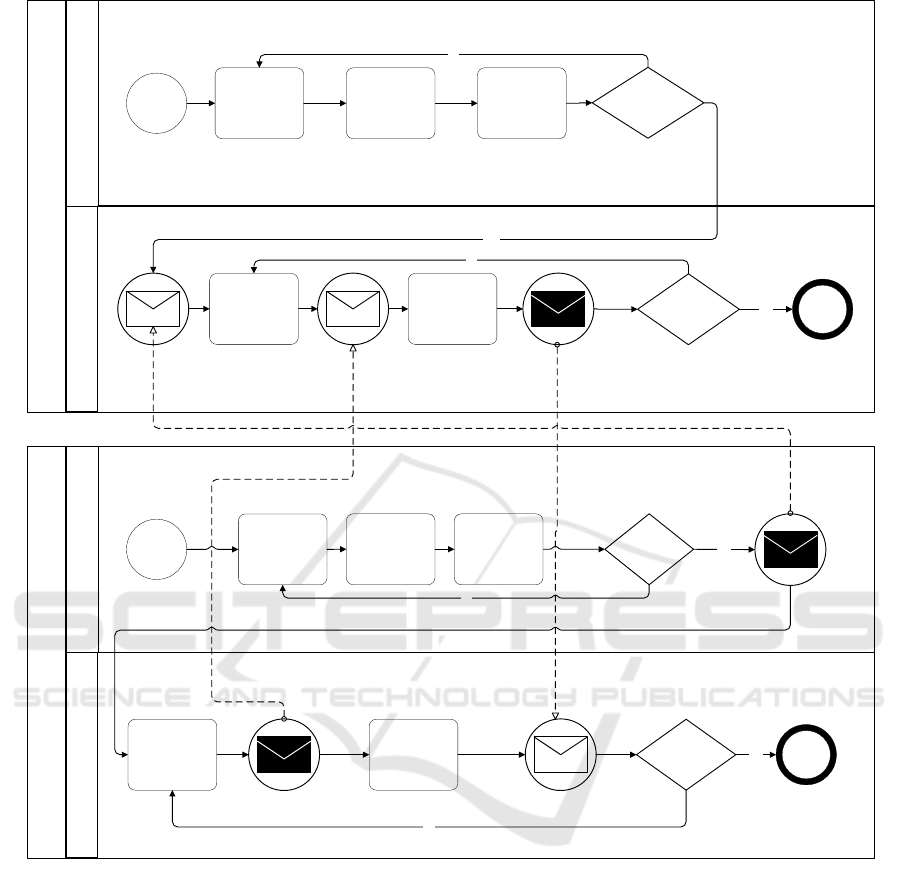
Figure 4 illustrates the refined BPMN derived
from Figure 3. In this version, the activities are pre-
sented in greater detail, with all processes decom-
posed into sub-processes. For example, Task A1 is
further divided into Tasks A1.1 and A1.2. The same
decomposition is applied to Tasks A2, B1, and B2.
This refinement highlights the atomic tasks, helping
to understand each step of the process. After the
completion of A2.2 and B2.2, there is a gateway that
checks if the tasks of the goal are completed so that
the next set of tasks can be performed, or the process
can be completed. For example, if task A2.2 is com-
pleted, the process moves on to B1.1; if not, it moves
back to A1.1.
Combining Goal and Process Models for the Specification of Human-Robot Collaborations
221
Human
Cobot
Human Goal
Cobot Goal
Start
End
Send Message
Receive message
Task
A1.1
Task
A1.2
Task
A2.1
Task
A2.2
Task
B1.1
Task
B1.2
Task
B2.1
Task
B2.2
Task
completed
No
Task
completed
No
yes
Yes
Figure 4: Refined BPMN.
4 EVALUATION
4.1 Case Example
We demonstrate how goal models and process models
can be combined to specify HRCA, using the semi-
automatic assembly of a toy truck as an example use
case.
The assembly process includes operations start-
ing from picking and preparing components to plac-
ing and screwing them. In the exemplary use case, a
toy truck is assembled through collaboration between
a human and a cobot. In the HRCA, the cobot initi-
ates by picking the truck’s load carrier from its storage
area and positioning it upside down on the collabora-
tive workspace. Subsequently, it proceeds to pick up
the cabin and chassis, placing each in the workspace.
The cobot then retrieves the front axle, securely hold-
ing it in place, and waits for the human operator to fix
it.
While the cobot handles these initial steps, the hu-
man operator prepares a sub-assembly by prepared
four axle holder by placing two screws in each. The
human operator then fixes the front axle with the pre-
pared axle holders with a screwdriver, and then re-
peats the process for the back axle.
4.2 Goal Model Creation
In the case of toy truck assembly, Figure 5 shows the
goal model for the example use case, outlining the co-
ordination between the human operator and the cobot.
This model highlights the main tasks required to as-
semble the truck and shows the dependencies between
these tasks. To achieve the main goal, the assembly of
the toy truck, and three sub-goals need to be fulfilled:
Prepare axle holders, prepare truck base and fix axles.
The two actors, human and cobot, have the fol-
lowing roles: Human: The human operator has two
primary tasks in the assembly process: preparing the
axle holders by picking and placing the parts and as-
semble them in the second step, and fixing the axles
with a screwdriver. These tasks depend on each other,
as picking and placing the parts is required for assem-
bling the axle holders, which are needed for the fixa-
tion of the axles.
Cobot: The cobot has two primary tasks: first,
preparing the truck base, and second, fixing the axles,
by first placing the axle and then holding the axles
in position, so the human operator can screw the axle
holders into place. The cobot tasks also have self-
dependencies, as the base of the truck needs to be as-
sembled, to place the axles.
The example also has two interdependencies be-
tween tasks of different actors. The first one is an
assembly sequence dependency, as the cobot has to
place the axle first, so that the human operator can put
the axle holders in place. The second one is a collab-
orative interaction, when the cobot holds the axle in
place and the human operation screws the parts to-
gether. This interdependent actions ensure that the
cobot’s tasks align with the human operator’s needs.
4.3 Deriving the BPMN from the Goal
Model
Based on the goal model and system specifications,
we derive a process model that outlines the tasks re-
quired for assembling the toy truck. This process
model, illustrated in Figure 6, depicts the tasks to be
undertaken by both the cobot and the human operator
throughout the assembly process.
The process model shows how the tasks are related
in terms of the overall assembly process (Figure 6).
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
222
Human
Cobot
Screw driver
Assemble toy truck
Prepare axle
holders
Pick and Place
parts
Assemble
parts
Fix axles
Screw parts
together
Pick and Place
assembled axle
holders
Prepare truck
base
Pick and Place
parts
Fix axles
Hold axle
Pick and Place
axles
D
D
AND
AND
AND
Figure 5: Goal model for the assembly of a toy truck.
Each actor (human operator and cobot) is repre-
sented as a BPMN pool, and their respective tasks
are captured as BPMN activities within these pools.
The tasks include the actions picking up components,
placing them in the workspace, and screwing the axles
into the truck body.
The main components of the BPMN are organized
as follows:
Cobot Pool: This pool contains tasks that the
cobot performs:
• “Pick and Place Parts”
• “Pick and Place Axles”
• “Hold Axles”
Human Operator Pool: This pool contains tasks
that the human operator performs:
• “Pick and Place Parts”
• “Assemble Parts”
• “Pick and Place Assembled Parts”
• “Screw Parts together”
In this phase, message events are used to represent
the interactions and dependencies between the two ac-
tors. For example, after the cobot places the axle, it
sends a message to the human operator, prompting
them to begin the next task of picking and placing
the axle holders. Similarly, after the human operator
finishes screwing, a message is sent back to the cobot,
instructing it to proceed with the next task.
4.4 Refining the BPMN
Figure 7 shows the refined BPMN which was ex-
tended from Figure 6.
Task Breakdown in BPMN: The process model
begins with the cobot executing a pick and place task,
in which it picks up the load carrier and positions it
within the collaborative workspace. The cobot then
proceeds to execute additional pick and place opera-
tions for the cabin and chassis.
When the cobot picks and places the front axle,
it holds the axle in position for the human operator
to perform the required assembly task of securing the
Combining Goal and Process Models for the Specification of Human-Robot Collaborations
223
Human
Prepare axle holders
Pick and
Place
parts
Assmble
parts
Hold
axles
Start
End
Send Message
Fix axles
Cobot
Prepare truck base
Pick and
Place
parts
Pick and
place
axles
Start
Fix axles
Pick and
Place
assemled
axle
holders
Screw
parts
together
End
Send Message
Send Message
Receive Message
Receive Message
Receive Message
Figure 6: BPMN derived from the goal model of the truck use case.
axle to the truck body. The cobot remains in this hold-
ing position until it receives a confirmation message
from the human operator indicating the completion
of the task. Upon receiving this message, the cobot
moves to the next instruction.
This task flow is repeated for the back axle.The
completion of the cobot’s tasks is signified by the
BPMN end notation, which indicates that all compo-
nents have been successfully assembled.
Human Operator Tasks in BPMN: The human
operator begins the assembly process by preparing the
axle holders for assembly. This involves picking the
axle holders, inserting screws into each slot, and ver-
ifying that all slots are filled.
In the next phase the human operator’s tasks, the
prepared axle holders for the front axle are placed
into position, with the cobot holding the axle in
place. This collaboration ensures that the axle hold-
ers are positioned accurately. Once the human oper-
ator confirms the correct placement, he proceeds to
use a screwdriver to secure the axle holders to the toy
truck’s body. After completing this task, the operator
confirms the execution and a message is sent to the
cobot to proceed with the next actions. This sequence
is then repeated for the back axle.
At the end of the process, the human operator en-
sures that all four axle holders are securely screwed
in place. This is represented by the gateway notation
in BPMN, indicating a decision point in the process.
If any axle holders are not correctly screwed in, the
human operator must repeat the screwing tasks until
all axle holders are correctly secured. Once all tasks
are completed, the process is complete.
Clarifying the Interaction Between Human and
Cobot: The BPMN provides clarity in illustrating the
separation of work between the human operator and
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
224
Human
Prepare axle holders
Start
End
Send Message
Fix axles
Cobot
Prepare truck base
Start
Send Message
Fix axles
End
Pick and Place 8
screws
Pick and Place 4
axle holders
Assemble axle
holders by
putting 2 screws
in one
Pick and Place
assembled axle
holder
Screw axle
holders to the
axles
Receive Message
Pick and Place
load carrier
Pick and Place
cabin
Pick and Place
chassis
Pick and Place 2
axles on the
front and back
of the chassis
Hold axle
Receive Message
Send Message
Receive Message
Yes
Axle holders
prepared
No
Screwed all
four axle
holders
Yes
No
Placed all
parts
Yes
No
Hold all four
axle holders
No
Yes
Figure 7: Refined BPMN of the truck use case.
the cobot, showing how their tasks are interdepen-
dent. BPMN also highlights the critical points where
human oversight and robotic precision intersect to en-
sure the assembly process is both efficient and ac-
curate. For instance: The human operator relies on
the cobot to position components accurately, such as
holding the axle in place during assembly. The cobot
waits for confirmation from the human operator be-
fore proceeding, ensuring that the tasks are coordi-
nated. This approach emphasizes the collaborative
nature of the task flow, ensuring that both the cobot
and human operator work together efficiently, with
clear roles and responsibilities throughout the assem-
bly process.
After the completion of every task in the process
lane, there are gateways that check if the tasks of the
human or cobot are complete in order to proceed with
the assembly process. For example, in the ’Prepare
Truck Base’ lane, after all the pick and place tasks,
the completion must be checked before sending the
message; if not, the process goes back to ’Pick and
Place Load Carrier.’
4.5 Discussion
The integration of goal models with BPMNs effec-
tively addresses the limitations of both approaches,
highlighting their complementary strengths and pro-
Combining Goal and Process Models for the Specification of Human-Robot Collaborations
225

viding a comprehensive framework for HRCA. As
demonstrated in the application example, goal mod-
els are excellent for identifying and emphasizing the
essential tasks required to achieve an overall objective
and how these tasks depend on each other. However,
goal models alone lack the sequential detail necessary
to fully understand how the tasks flow within a pro-
cess. This is where BPMN adds value by providing a
structured task flow and clearly delineating the order
of actions from start to finish.
The clear mapping between the GRL goal model
and the BPMN notations as shown in Figure 2 ensures
the compliance of the BPMN with the goal model and
offers several key benefits:
• Enhanced Clarity and Comprehension: The
combined use of goal models and BPMN provides
more detailed representation of the collaboration
process. While goal models focus on identifying
critical tasks, BPMN ensures the sequential flow
of actions is captured, making it easier to under-
stand how each task fits into the larger process and
how they interact.
• Improved Process Management: By integrating
the strategic focus of the goal model with the de-
tailed assembly sequence provided by the BPMN,
it becomes easier to manage and optimize HRCA.
This approach helps identify potential safety haz-
ards, areas for process improvement, and resource
allocation issues.
• Operational Efficiency: By leveraging the de-
tailed flow of the BPMN and the goal-oriented fo-
cus of the goal model, the integrated approach en-
ables the development of more efficient HRCA. It
ensures that the tasks of both the human operator
and cobot are aligned, well-coordinated.
• Comprehensive Documentation: The combined
approach ensures that both the high-level goals
and detailed process steps are thoroughly docu-
mented. This is essential not only for understand-
ing the HRCA, but also for process analysis, such
as evaluating efficiency and identifying areas for
continuous improvement.
In the present version, it is possible to derive a
BPMN from a goal model and then refine it accord-
ingly without affecting the mapping based on the
transformation table. This allows the creation of an
assembly sequence plan (BPMN) that is compliant
with the overall assembly objectives (goal model).
One limitation of this approach is that the soft
goals defined in the goal model are not translated
into the BPMN, which is mainly due to the fact that
the soft goals have a heterogeneous character. In the
context of the truck use case, a possible soft goal
of ‘safe interaction’ could be incorporated into the
BPMN as an event. Conversely, ‘efficient interaction’
would likely exert influence on the process flow of
the tasks. The implementation of a standardized no-
tation in these scenarios pose a significant challenge.
Nonetheless, it is imperative to acknowledge the im-
portance of soft goals in the context of HRCA.
5 CONCLUSION & FUTURE
WORK
HRC plays a crucial role in future manufacturing sce-
narios, where humans and robots collaborate on a
task-level to jointly create a product. This collabo-
ration enables semi-automation of flexible assembly
processes for small batch sizes or allows the imple-
mentation of complex assembly tasks that are chal-
lenging to fully automate. Therefore, careful plan-
ning and task allocation are essential to ensure ef-
fective collaboration. This is particularly important
during the early development stages, where analysis
must determine whether HRC can effectively solve a
particular task and identify critical aspects early on.
Recent works have demonstrated the utility of
goal models in supporting the early analysis of col-
laborative and robotic systems. Goal models are ex-
cellent at identifying high-level objectives, but they
often lack the sequential detail of the tasks required
to achieve those goals. Therefore, in this paper, we
introduced an integrated approach to derive process
models directly from goal models for HRCA. This
approach systematically transforms GRL-based goal
models into BPMN process models. It creates clear
traceability between high-level goals and detailed op-
erational tasks. We apply this approach to a toy truck
assembly use case. The results show improved task
specification, process clarity, and task coordination.
The integration of goal models and BPMNs align
strategic goals with workflows. This alignment sup-
ports better goal fulfillment, clearer task traceability,
and more efficient collaboration. It benefits semi-
automated manufacturing environments by enhancing
overall productivity and coordination. The abstract
nature of the transformation table makes it possible
for anyone to reuse the proposed integrated approach
by following it and therefore achieving the expected
outcomes.
In future work, we plan to extend this approach to
include safety assessments in HRCA. Safety is criti-
cal in environments where humans and robots work
closely together. Linking safety-related goals in goal
models to BPMN constructs allows for early hazard
detection. It also facilitates proactive safety monitor-
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
226

ing throughout workflows. Additionally, we will ex-
tend our case study to a larger-scale assembly setting
to demonstrate the scalability of our approach. We
plan to conduct a broader evaluation of the transfer-
ability from goal models to BPMNs in more complex,
industry-relevant scenarios, such as in the automotive
or aerospace industries, where task dependencies in
HRCA are more intricate. Finally, we plan to auto-
mate the overall framework using model-driven de-
velopment methods.
During the evaluation of our truck assembly, it
was realized that conclusions can be drawn not only
from the goal models to the BPMN, but also from the
refinement of the BPMN to a redesign of the goal
model. This creates a bidirectional iterative process
where both goal models and BPMN are continuously
improved. By expanding this methodology, we aim
to enhance the efficiency and effectiveness of HRCA,
ensuring that human operators and robots collaborate
more seamlessly to achieve the goals of modern man-
ufacturing.
REFERENCES
Amyot, D., Akhigbe, O., Baslyman, M., Ghanavati, S.,
Ghasemi, M., Hassine, J., Lessard, L., Mussbacher,
G., Shen, K., and Yu, E. (2022). Combining goal mod-
elling with business process modelling: Two decades
of experience with the user requirements notation
standard. Enterprise Modelling and Information Sys-
tems Architectures (EMISAJ), 17:2–1.
B
¨
ohm, B., B
¨
ohm, W., Daun, M., Hayward, A., Kranz, S.,
Regnat, N., Schr
¨
ock, S., Stierand, I., Vogelsang, A.,
Vollmar, J., Voss, S., Weyer, T., and Wortmann, A.
(2021). Engineering of collaborative embedded sys-
tems. In B
¨
ohm, W., Broy, M., Klein, C., Pohl, K.,
Rumpe, B., and Schr
¨
ock, S., editors, Model-Based En-
gineering of Collaborative Embedded Systems, pages
15–48. Springer.
Bourr, K., Corradini, F., Pettinari, S., Re, B., Rossi, L., and
Tiezzi, F. (2021). Disciplined use of bpmn for mission
modeling of multi-robot systems. In Working Confer-
ence on the Practice of Enterprise Modelling.
Chen, F., Sekiyama, K., Sasaki, H., Huang, J., Sun, B.,
and Fukuda, T. (2011). Assembly strategy modeling
and selection for human and robot coordinated cell as-
sembly. In 2011 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 4670–4675.
IEEE.
Chen, P. (2007). Goal-oriented business process monitor-
ing. PhD thesis, Citeseer.
Cherubini, A., Passama, R., Crosnier, A., Lasnier, A.,
and Fraisse, P. (2016). Collaborative manufacturing
with physical human–robot interaction. Robotics and
Computer-Integrated Manufacturing, 40:1–13.
Corradini, F., Pettinari, S., Re, B., Rossi, L., and Tiezzi,
F. (2023). A bpmn-driven framework for multi-robot
system development. Robotics and Autonomous Sys-
tems, 160.
Daniel Amyot, O. A. (2022). Combining goal mod-
elling with business process modelling. Enter-
prise Modelling and Information Systems Architec-
tures (EMISAJ).
Daun, M., Manjunath, M., and Jesus Raja, J. (2023). Safety
analysis of human robot collaborations with grl goal
models. In International Conference on Conceptual
Modeling, pages 317–333. Springer.
Daun, M., Stenkova, V., Krajinski, L., Brings, J.,
Bandyszak, T., and Weyer, T. (2019). Goal model-
ing for collaborative groups of cyber-physical systems
with grl: reflections on applicability and limitations
based on two studies conducted in industry. In Pro-
ceedings of the 34th ACM/SIGAPP Symposium on Ap-
plied Computing, pages 1600–1609.
Est
´
evez, E. and Marcos, M. (2011). Model-based validation
of industrial control systems. IEEE Transactions on
Industrial Informatics, 8(2):302–310.
Fernandes, J., Reis, J., Mel
˜
ao, N., Teixeira, L., and Amorim,
M. (2021). The role of industry 4.0 and bpmn in the
arise of condition-based and predictive maintenance:
A case study in the automotive industry. Applied Sci-
ences, 11(8):3438.
Grau, A., Indri, M., Bello, L. L., and Sauter, T. (2020).
Robots in industry: The past, present, and future of a
growing collaboration with humans. IEEE Industrial
Electronics Magazine, 15(1):50–61.
Horkoff, J. and Yu, E. (2011). Analyzing goal models: dif-
ferent approaches and how to choose among them. In
Proceedings of the 2011 ACM Symposium on Applied
Computing, pages 675–682.
Jesus Raja, J., Manjunath, M., and Daun, M. (2024). To-
wards a goal-oriented approach for engineering digital
twins of robotic systems. In ENASE, pages 466–473.
Kem
´
eny, Z., V
´
ancza, J., Wang, L., and Wang, X. V.
(2021). Human–robot collaboration in manufacturing:
A multi-agent view. In Advanced human-robot collab-
oration in manufacturing, pages 3–41. Springer.
Kranz, P., Elbishbishy, S., Jesus Raja, J., and Daun, M.
(2024). Supporting safety assessment in human-
robot collaboration using process models. In ER2024:
Companion Proceedings of the 43rd International
Conference on Conceptual Modeling: ER Forum,
Special Topics,Posters and Demos, October 28-31,
2024, Pittsburgh, Pennsylvania, USA, pages 136–140.
CEUR Workshop Proceedings.
Lestingi, L. and Longoni, S. (2016). Hrc-team: A model-
driven approach to formal verification and deployment
of collaborative robotic applications.
Malik, A. A. and Bilberg, A. (2019). Developing a ref-
erence model for human–robot interaction. Interna-
tional Journal on Interactive Design and Manufactur-
ing (IJIDeM), 13(4):1541–1547.
Manjunath, M., Jesus Raja, J., and Daun, M. (2024). Early
model-based safety analysis for collaborative robotic
systems. IEEE Transactions on Automation Science
and Engineering.
Combining Goal and Process Models for the Specification of Human-Robot Collaborations
227

Matheson, E., Minto, R., Zampieri, E. G., Faccio, M.,
and Rosati, G. (2019). Human–robot collaboration
in manufacturing applications: A review. Robotics,
8(4):100.
Ortiz, J., Torres, V., and Valderas, P. (2024). Combin-
ing goal-oriented and bpmn modelling to support dis-
tributed microservice compositions. In ENASE, pages
75–86.
Ponsard, C. and Darimont, R. (2019). Towards goal-
oriented analysis and redesign of bpmn models. In
MODELSWARD, pages 527–533.
Sim
˜
oes, A. C., Pinto, A., Santos, J., Pinheiro, S., and
Romero, D. (2022). Designing human-robot collab-
oration (hrc) workspaces in industrial settings: A sys-
tematic literature review. Journal of Manufacturing
Systems, 62:28–43.
Van Lamsweerde, A. (2001). Goal-oriented requirements
engineering: A guided tour. In Proceedings fifth ieee
international symposium on requirements engineer-
ing, pages 249–262. IEEE.
Vysocky, A. and Novak, P. (2016). Human-robot collabora-
tion in industry. MM Science Journal, 9(2):903–906.
Wang, L., Liu, S., Liu, H., and Wang, X. V. (2020).
Overview of human-robot collaboration in manufac-
turing. In Proceedings of 5th International Confer-
ence on the Industry 4.0 Model for Advanced Manu-
facturing: AMP 2020, pages 15–58. Springer.
Weiss, A., Wortmeier, A.-K., and Kubicek, B. (2021).
Cobots in industry 4.0: A roadmap for future practice
studies on human–robot collaboration. IEEE Transac-
tions on Human-Machine Systems, 51(4):335–345.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
228
