
A Framework for Disentangling Efficiency from Effectiveness in
External HMI Evaluation Procedures for Automated Vehicles
Alexandros Rouchitsas
a
Department of Information Technology, Uppsala University, Uppsala, Sweden
Keywords: External Human-Machine Interfaces, Automated Vehicles, Road Users, Usability, Evaluation, Methodology.
Abstract: Automated vehicles (AVs) are rapidly transforming smart cities, offering potential benefits such as improved
safety, performance, mobility, accessibility, and overall user experience in traffic. A key area of focus in this
evolution is the development of external human-machine interfaces (eHMIs) which aim to equip AVs with
communication capabilities. Said interfaces address critical challenges, including mitigating safety risks and
enhancing traffic flow in scenarios where drivers are inattentive or altogether absent, and play an important
role in allaying distrust of the general public in AVs. Considering the research field of eHMIs is relatively
young, it is unsurprising that standardized eHMI evaluation procedures are yet to be established. As a result,
the effectiveness and efficiency of eHMI concepts are often assessed either simultaneously within the same
evaluation procedure or separately but in otherwise similar procedures. Unfortunately, these approaches
overlook on the whole the fundamental differences between the two constructs, resulting in limitations
relating to the validity, reliability, and comparability of the findings. Here, I present a definitive framework
aimed at disentangling efficiency from effectiveness by guiding methodological choices regarding design
rationale explanation, instructions emphasizing speed, trial-level time limit, and targeted performance
measures, depending on the research questions of interest.
1 INTRODUCTION
Automated vehicles (AVs) are taking smart cities by
storm due to their potential for improving safety,
performance, mobility, accessibility, and overall user
experience in traffic. Sooner rather than later, road
users will need to interact extensively and intensively
with highly (SAE Level 4) and fully (SAE Level 5)
automated vehicles that either transport passengers
who no longer have to be attentive to the road and
participate in traffic interaction scenarios or simply
drive around with no human operator or passenger on
board, to deliver goods and services to third parties
(ISO/TR 23049:2018, 2018; SAE International
J3016, 2021).
The burgeoning field of external human-machine
interfaces (eHMIs) has been concerned with
equipping AVs with communication capabilities to
primarily mitigate traffic safety and traffic flow issues
that are expected to arise due to inattentive or
altogether absent drivers, but also promote public
trust in and acceptance of this novel technology
a
https://orcid.org/0000-0003-3503-4676
(Rouchitsas and Alm, 2019; Dey et al., 2020; Calvo-
Barajas et al., 2025). Typical eHMI concepts provide
information regarding kinematics of the oncoming
vehicle (e.g., speed and acceleration), mode (e.g.,
manual, highly, or fully automated), situational
awareness (detection and acknowledgement of
nearby vulnerable road users such as pedestrians and
cyclists), and imminent maneuvres (e.g., yielding,
taking off, or changing lanes). To achieve this, eHMIs
utilize the external surface and/or the immediate
surroundings of an AV to communicate relevant
messages via LED light strips, rotating headlights,
displays, speakers, on-road projections, and even
shape change (Bazilinskyy et al., 2019).
eHMI concepts are commonly evaluated with
respect to their usability, i.e., their effectiveness,
efficiency, and potential for user satisfaction, in the
context of field studies, laboratory experiments, and
online surveys (Rouchitsas and Alm, 2019).
Effectiveness refers to a concept’s ability to bring
about the desired result, whereas efficiency refers to
a concept’s ability to be effective all the while
616
Rouchitsas, A.
A Framework for Disentangling Efficiency from Effectiveness in External HMI Evaluation Procedures for Automated Vehicles.
DOI: 10.5220/0013435900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 616-621
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

expending the least amount of resources (Bevan et al.,
2015, Schömig et al., 2024). Considering this
research field is relatively young, it comes as no
surprise that, despite a few noteworthy attempts and
calls to action, eHMI evaluation procedures have not
been standardized yet (Rouchitsas and Alm, 2019;
Kaß et al., 2020). As a result, the effectiveness and
efficiency of eHMIs are often assessed either
simultaneously within the same evaluation procedure
or separately but in otherwise similar procedures.
Unfortunately, these approaches overlook for the
most part the fundamental differences between the
two constructs, resulting in limitations relating to the
validity, reliability, and comparability of the findings.
In this paper, I present a definitive framework aimed
at disentangling efficiency from effectiveness by
guiding methodological choices regarding design
rationale explanation, instructions emphasizing
speed, trial-level time limit, and performance
measures, depending on the research questions of
interest.
In the following sections, I will delve into the
proposed framework and the methodological
concerns it aims to alleviate (section 2), present
relevant eHMI evaluation attempts (section 3),
discuss the benefits of the proposed framework
(section 4), and conclude with the take-home message
and suggestions for future work (section 5).
2 METHODOLOGICAL
CONCERNS AND PROPOSED
FRAMEWORK
The majority of empirical work has focused on
evaluating the effectiveness of eHMI concepts which
basically translates to communicating relevant
information clearly and thus supporting road users in
making appropriate decisions depending on the
specifics of the traffic situation at hand. In eHMI
evaluation procedures, participants are typically
asked to infer what the AV is trying to communicate
and decide appropriately, while their response
accuracy – assessed from error rates – is treated as a
measure of the effectiveness of each eHMI concept,
most times referred to as the “comprehensibility”,
“understandability”, or “intelligibility” of the concept
(Bevan et al., 2015; Wiese et al., 2017). In that sense,
effectiveness is evaluated on the basis of an absolute
criterion: a concept can either be effective or not.
For all that, numerous studies have also evaluated
eHMI concepts with respect to their efficiency, which
in this case translates to communicating relevant
information faster and easier than alternative
concepts, and therefore leading to appropriate
responses in less time and with less effort. In these
eHMI evaluation procedures, participants are
typically asked to make the appropriate traffic
decision as fast as possible, while their response
latency – assessed from reaction times (RTs) – and
their effort – assessed from NASA-TLX ratings – is
treated as a measure of the efficiency of each concept
(Hart, 2006; Bevan et al., 2015; Wiese et al., 2017).
In that sense, efficiency is evaluated on the basis of a
relative criterion: a concept can fare “better” or
“worse” compared to other concepts.
2.1 Effectiveness
Nevertheless, it is often the case that due to feasibility
limitations or methodological confusion,
effectiveness and efficiency are either evaluated
simultaneously in the context of the same evaluation
procedure or separately but in the context of
otherwise similar procedures that do not take into
account the fundamental differences between the two
constructs (Cheema et al., 2023). More specifically,
for effectiveness to be evaluated in a proper manner,
no explanation of the design rationale behind each
eHMI concept should be provided to participants
beforehand to ensure unbiased responses. Moreover,
no instruction to “respond as fast and accurately as
possible” should be provided to ensure mitigation of
the speed-accuracy trade off phenomenon, the well-
known phenomenon according to which emphasizing
fast responses leads to a higher percentage of
incorrect ones (Kantowitz et al., 2014). Lastly, the
evaluation procedure should employ self-paced trials
with no time limit at the trial level to ensure
participants have ample time to decode the presented
message and act appropriately.
In the event that explanation is provided
beforehand in evaluations of eHMI effectiveness, a
correct response regarding “comprehensibility”,
“understandability”, or “intelligibility” of any eHMI
concept will be biased and thus rendered useless for
further analysis. Accordingly, instructions to respond
fast will render data uninterpretable as in the event of
an incorrect response the simple question “Was the
participant hurrying or did they truly not know the
right answer?” cannot be conclusively answered. In
the same vein, responding within a prespecified
temporal window will render data uninterpretable in
the event of no response as the simple question “Was
the participant too slow or did they truly not know the
right answer?” cannot be conclusively answered
either.
It becomes easily apparent then that
A Framework for Disentangling Efficiency from Effectiveness in External HMI Evaluation Procedures for Automated Vehicles
617
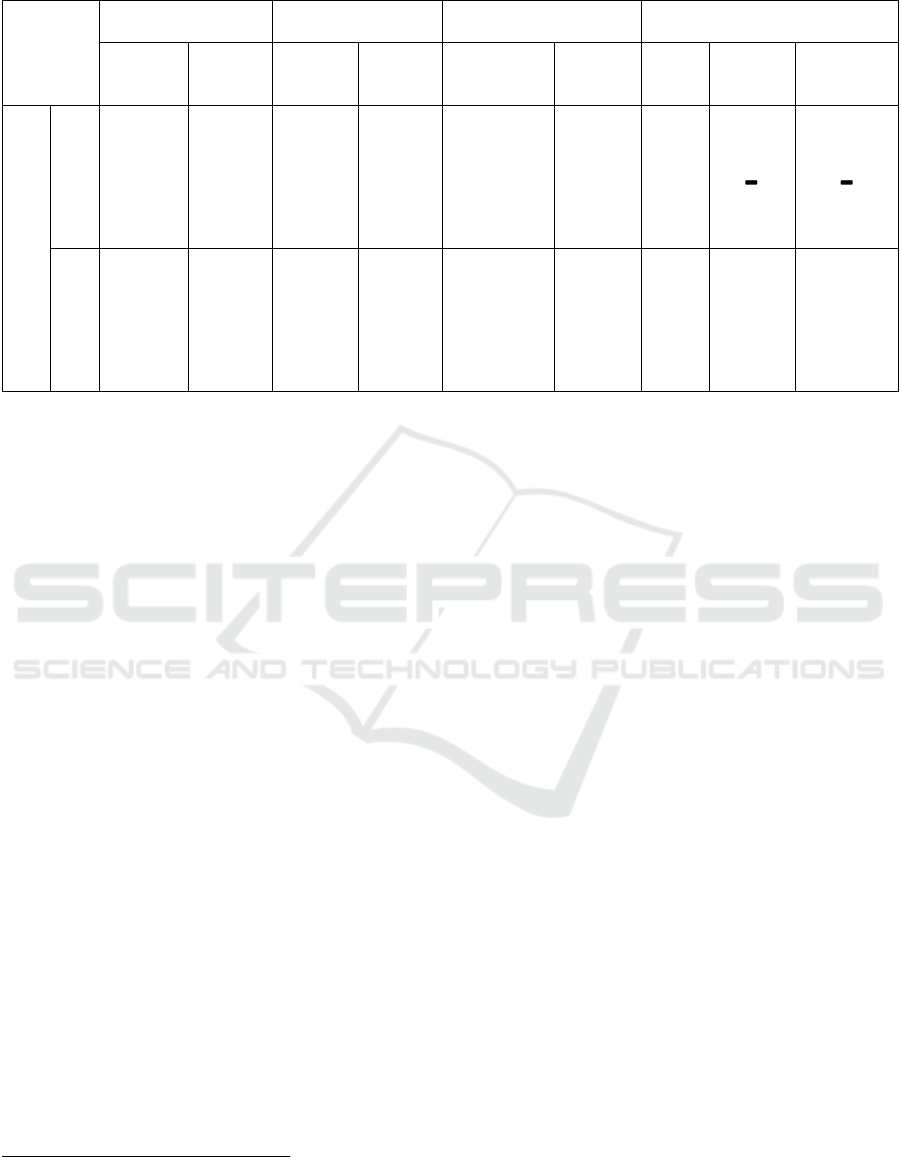
Table 1: Proposed framework for eHMI evaluation procedures for AVs.
Design Rationale
Explanation
Instructions
Emphasizing Speed
Trial-Level
Time Limit
Performance
Measures
No Yes No Yes No Yes
Error
Rates
RTs
NASA-
TLX
Ratings
Research Question
Effectiveness
✔
Correct
response:
Biased
✔
Incorrect
response:
“Hurried
or didn’t
know?”
✔
No
response:
“Too slow
or didn't
know?”
✔
Efficiency
Correct
response:
Entangled
✔
Correct
response:
Indistinct
✔
All
responses:
“Too slow or
not following
instructions?”
✔ ✔
1
✔ ✔
effectiveness should be evaluated in the context of
evaluation procedures where the design rationale is
not explained to participants beforehand, instructions
to respond fast are not given, and there is no time limit
at the trial level.
2.2 Efficiency
Given that efficiency is meaningful only in the
context of effectiveness – the first being a subpart of
the second, as it is nonsensical to think of something
as being efficient when it is not effective in the first
place – it is reasonable to expect that the underlying
psychological processes that affect both overlap to a
great extent (Cheema et al., 2023). For instance, when
evaluating an eHMI concept, its legibility, i.e., its
quality of being clear enough to read quickly and
easily, and its intelligibility interact in a way that if
evaluated at the same time, a correct response cannot
be attributed conclusively to either factor. Therefore,
it is crucial to develop evaluation procedures that
disentangle the two. An obvious workaround if one
were to evaluate legibility would be to provide
participants with the design rationale behind the
eHMI concept in question beforehand, and then opt
for a task where participants know in advance what
the correct response is and are only evaluated on the
basis of how quickly and easily they respond.
Evidently, for efficiency to be evaluated in a
proper manner, emphasis should also be placed on
fast responses given that it is mostly the temporal
1
It is common practice in the experimental/cognitive
psychology tradition to analyze RTs for correct
responses only (Kyllonen and Zu, 2016).
aspect that is under scrutiny in this case. Therefore, it
is essential to also provide instructions to participants
that emphasize speed to generate sufficiently distinct
correct responses, given latency measures such as
RTs are more sensitive to experimental manipulations
and their accompanying differences (Kyllonen and
Zu, 2016).
Furthermore, contrary to effectiveness
evaluations, responding within a prespecified
temporal window is essential in efficiency
evaluations, as the absence of such a window will
render data uninterpretable for all responses (correct;
incorrect; no response) considering the simple
question “Was the participant too slow or simply not
following the instructions?” cannot be conclusively
answered. It becomes easily apparent then that
efficiency should be evaluated in the context of
procedures where the design rationale is explained
beforehand, instructions to respond fast are given to
participants, and there is a tight time limit at the trial
level.
Table 1 summarizes the optimal methodological
choices for eHMI evaluations regarding design
rationale explanation, emphasis on fast responses,
time limit at the trial level, and targeted performance
measures according to the proposed framework. It is
clear that what is methodologically optimal for
effectiveness evaluations should absolutely be
avoided in the case of efficiency evaluations, and vice
versa, if one is aiming for interpretable data.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
618

3 eHMI EVALUATION
ATTEMPTS
The lack of a definitive framework aimed at
disentangling efficiency from effectiveness in eHMI
evaluation procedures has for the most part left
researchers and practitioners to their own devices and
has allowed for counterproductive amounts of
improvization and creative freedom to creep into the
practices of the field. For instance, Stadler et al. (2019)
developed one single procedure to evaluate the
effectiveness and efficiency of as well as the user
satisfaction with an eHMI concept all at once.
Participants were tasked with jaywalking in front of an
approaching AV equipped with the interface in a VR
environment. In a methodological mix-and-match of
sorts, which resulted in confounding the effectiveness
of the concept with its efficiency, the design rationale
was not explained beforehand, no instruction to
“respond as fast and accurately as possible” was given,
there was a time limit at the trial level, and error rates,
RTs, and NASA-TLX ratings were collected,
Similarly, Chang et al. (2018) compared five existing
interfaces, developed by automotive manufacturers,
technology companies, and research groups, to
communicate the intention of an AV to other road
users. Participants watched animated videos of an AV
equipped with each interface approaching an
unsignalized crosswalk and were tasked with making
judgments about the AV’s intention regarding
yielding. In their evaluation procedure, the design
rationale was not explained beforehand, instruction to
“respond as fast and accurately as possible” was given,
there was a time limit at the trial level, and error rates
and RTs were collected. Furthermore, Mahadevan et
al. (2018) evaluated four interfaces aimed at
acknowledging pedestrian presence and signaling AV
intention, by measuring participants’ crossing
intention. In a parking garage, participants were tasked
with reporting their intention to cross the street, while
a vehicle equipped with one of the interfaces was
approaching. In their evaluation procedure, the design
rationale was explained beforehand and there was a
time limit at the trial level – considering the vehicle
travelled a predefined distance at a certain speed while
participants contemplated crossing – instruction to
“respond as fast and accurately as possible” was not
given, and neither RTs nor NASA-TLX ratings were
collected.
Having said that, there have been eHMI evaluation
attempts that have approximated the evaluation
procedure the proposed framework is arguing for. A
case in point is Hensch et al. (2019), who evaluated
the comprehensibility of an eHMI concept they
developed to communicate AV mode and intention to
pedestrians. In their study, random pedestrians
interacted with a vehicle equipped with the interface
in a parking area, and were then asked – among other
things – what they thought was indicated by each
signal (open-ended question), in an interview that
lasted around 5 minutes, providing interviewees with
ample time for reflection. In like manner, Ackermann
et al. (2019) studied the effect of four interface
parameters on eHMI comprehensibility. Participants
viewed augmented real-world videos of an AV
equipped with an interface approaching and were
asked to reflect on the content of what the oncoming
vehicle was trying to communicate. It is safe to say
that these studies closely approximate the ideal
procedure for evaluating eHMI effectiveness.
Accordingly, Eisma et al. (2021) studied the effect of
an eHMI parameter on crossing decisions, RTs, and
eye movements. In their evaluation procedure,
instruction to “respond as fast and accurately as
possible” was given, there was a time limit at the trial
level, and error rates and RTs were collected. Even
though the design rationale was not explained
beforehand, all the evaluated designs were textual
(Walk; Don’t walk; Braking; Driving; Go; Stop;) and
thus self-explanatory to a great extent. Evidently, this
work closely approximates the ideal procedure for
evaluating eHMI efficiency.
The proposed framework has inarguably been
exemplified in Rouchitsas and Alm (2022; 2023) were
the effectiveness and efficiency of an eHMI concept
employing facial expressions for communicating AV
intention were evaluated in the context of separate
evaluation procedures. More specifically, in
Rouchitsas and Alm (2022), participants evaluated the
effectiveness of said concept without any explanation
being provided beforehand regarding the design
rationale, no instruction to “respond as fast and
accurately as possible”, no time limit at the trial level,
and with error rates being collected only. On the other
hand, in Rouchitsas and Alm (2023), participants
evaluated the efficiency of the same concept with clear
explanation of the design rationale being provided
beforehand, explicit instruction to “respond as fast and
accurately as possible”, a tight time limit at the trial
level, and with RTs complimenting the error rates
being collected.
4 DISCUSSION
When evaluating eHMI concepts, it is essential to
distinguish between two key usability aspects:
effectiveness and efficiency. Effectiveness pertains to
A Framework for Disentangling Efficiency from Effectiveness in External HMI Evaluation Procedures for Automated Vehicles
619

whether potential road users will correctly interpret
the information conveyed by the eHMI to make
appropriate decisions during interactions with AVs.
Efficiency, on the other hand, addresses how quickly
and effortlessly potential road users can arrive at
those decisions in traffic. The question of whether a
delayed response is due to a lack of understanding of
the intended communication or due to a slower
decision-making process highlights the need to
disentangle efficiency from effectiveness in eHMI
evaluation procedures.
The proposed framework aims to do away with
the common and persistent methodological pitfall of
confounding the effectiveness of a concept with its
efficiency, a pitfall that has plagued the eHMI field
since its very inception. The proposed framework
manages to accomplish just that by guiding
methodological choices regarding design rationale
explanation, instructions emphasizing speed, trial-
level time limit, and targeted performance measures,
depending on whether the research focus is the
effectiveness or the efficiency of a given eHMI
concept. A clear separation between effectiveness and
efficiency ensures a robust evaluation of eHMI
concepts, helping researchers and practitioners
identify whether issues stem from the communication
clarity of the interface or the speed and ease of
information processing. Moreover, by employing
targeted measures – such as error rates to measure
effectiveness and RTs and workload ratings to
measure efficiency – researchers and practitioners
can better understand the strengths and weaknesses of
different eHMI concepts, make valid and reliable
comparisons, and proceed with scientifically sound
modifications to refine the concepts and ultimately
ensure accurate, timely, and effortless responses from
road users when interacting with AVs.
5 CONCLUSIONS AND OPEN
PROBLEMS
The proposed framework provides a systematic
approach to definitively addressing a long-standing
methodological issue in the eHMI field, namely
disentangling efficiency from effectiveness in eHMI
evaluation procedures, and shows great promise for
becoming the field’s standard evaluation framework
for concept development. Nevertheless, the trade-off
between effectiveness and efficiency requires further
investigation, as the interplay between the two
usability aspects can be complicated. Future work
should explore cases where improving one might
inadvertently compromise the other.
REFERENCES
Ackermann, C., Beggiato, M., Schubert, S., & Krems, J. F.
(2019). An experimental study to investigate design and
assessment criteria: What is important for
communication between pedestrians and automated
vehicles? Applied ergonomics, 75, 272–282.
Bazilinskyy, P., Dodou, D., & De Winter, J. (2019). Survey
on eHMI concepts: The effect of text, color, and
perspective. Transportation research part F: traffic
psychology and behaviour, 67, 175-194.
Bevan, N., Carter, J., & Harker, S. (2015). ISO 9241-11
revised: What have we learnt about usability since
1998? In Human-Computer Interaction: Design and
Evaluation: 17th International Conference, HCI
International 2015, Los Angeles, CA, USA, August 2-7,
2015, Proceedings, Part I 17 (pp. 143-151). Springer
International Publishing.
Calvo-Barajas, N., Rouchitsas, A., & Gürdür Broo, D.
(2025). Examining Human-Robot Interactions: Design
Guidelines for Trust and Acceptance. In Human-
Technology Interaction – Interdisciplinary Approaches
and Perspectives, Springer.
Chang, C. M., Toda, K., Sakamoto, D., & Igarashi, T.
(2017). Eyes on a Car: An Interface Design for
Communication between an Autonomous Car and a
Pedestrian. In Proceedings of the 9th international
conference on automotive user interfaces and
interactive vehicular applications (pp. 65-73).
Cheema, K., Sweneya, S., Craig, J., Huynh, T., Ostevik, A.
V., Reed, A., & Cummine, J. (2023). An investigation
of white matter properties as they relate to spelling
behaviour in skilled and impaired readers.
Neuropsychological Rehabilitation, 33(6), 989-1017.
Dey, D., Habibovic, A., Löcken, A., Wintersberger, P.,
Pfleging, B., Riener, A., ... & Terken, J. (2020). Taming
the eHMI jungle: A classification taxonomy to guide,
compare, and assess the design principles of automated
vehicles' external human-machine interfaces.
Transportation Research Interdisciplinary
Perspectives, 7, 100174.
Eisma, Y. B., Reiff, A., Kooijman, L., Dodou, D., & de
Winter, J. C. (2021). External human-machine
interfaces: Effects of message perspective.
Transportation research part F: traffic psychology and
behaviour, 78, 30-41.
Hart, S. G. (2006). NASA-task load index (NASA-TLX);
20 years later. In Proceedings of the human factors and
ergonomics society annual meeting (Vol. 50, No. 9, pp.
904-908). Sage CA: Los Angeles, CA: Sage
publications.
Hensch, A. C., Neumann, I., Beggiato, M., Halama, J., &
Krems, J. F. (2019). Effects of a light-based
communication approach as an external HMI for
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
620

Automated Vehicles--a Wizard-of-Oz Study.
Transactions on Transport Sciences, 10(2).
ISO/TR 23049:2018, (2018). Road Vehicles: Ergonomic
Aspects of External Visual Communication from
Automated Vehicles to Other Road Users. London: BSI.
Kantowitz, B. H., Roediger III, H. L., & Elmes, D. G.
(2014). Experimental psychology. Cengage Learning.
Kaß, C., Schoch, S., Naujoks, F., Hergeth, S., Keinath, A.,
& Neukum, A. (2020). Standardized test procedure for
external Human–Machine Interfaces of automated
vehicles. Information, 11(3), 173.
Kyllonen, P. C., & Zu, J. (2016). Use of response time for
measuring cognitive ability. Journal of Intelligence,
4(4), 14.
Mahadevan, K., Somanath, S., & Sharlin, E. (2018).
Communicating awareness and intent in autonomous
vehicle-pedestrian interaction. In Proceedings of the
2018 CHI conference on human factors in computing
systems (pp. 1-12).
Rouchitsas, A., & Alm, H. (2019). External human–
machine interfaces for autonomous vehicle-to-
pedestrian communication: A review of empirical
work. Frontiers in psychology, 10, 2757.
Rouchitsas, A., & Alm, H. (2022). Ghost on the windshield:
Employing a virtual human character to communicate
pedestrian acknowledgement and vehicle intention.
Information, 13(9), 420.
Rouchitsas, A., & Alm, H. (2023). Smiles and angry faces
vs. nods and head shakes: Facial expressions at the
service of autonomous vehicles. Multimodal
Technologies and Interaction, 7(2), 10.
SAE International J3016. (2021). Taxonomy and
Definitions of Terms Related to Driving Automation
Systems for on-road Motor Vehicles. Available at:
www.sae.org (accessed on January 2, 2025).
Schömig, N., Kremer, C., Gary, S., Forster, Y., Naujoks, F.,
Keinath, A., & Neukum, A. (2024). Test procedure for
the evaluation of partially automated driving HMI
including driver monitoring systems in driving
simulation. MethodsX, 12, 102573.
Stadler, S., Cornet, H., Novaes Theoto, T., & Frenkler, F.
(2019). A tool, not a toy: using virtual reality to evaluate
the communication between autonomous vehicles and
pedestrians. Augmented Reality and Virtual Reality:
The Power of AR and VR for Business, 203-216.
Wiese, E., Metta, G., & Wykowska, A. (2017). Robots as
intentional agents: using neuroscientific methods to
make robots appear more social. Frontiers in
psychology, 8, 1663.
A Framework for Disentangling Efficiency from Effectiveness in External HMI Evaluation Procedures for Automated Vehicles
621
