
Enhancing Scenario-based Testing for Automated Driving Systems:
An Ontology-Based Scenario Modeling Framework
Zhenguo Cui
1,2
, Svetlana Dicheva
1
, Adam Abdin
2
, Bernard Yannou
2
and Jean-Marc Giroux
1
1
ALTEN Labs, Sèvres, France
2
Laboratoire Génie Industriel, CentraleSupélec, Université Paris-Saclay, France
Keywords: Scenario-based Testing (SbT), Scenario Modeling, Ontology Engineering, Automated Driving Systems.
Abstract: Scenario-based Testing (SbT) emerges as a pivotal approach for validating the safe behaviors of Automated
Driving (AD) and Advanced Driver-Assistance Systems (ADAS). Using virtual simulation, SbT allows for
generating and running massive testing cases. This approach gathers typical driving situations and critical
edge cases. Properly modeling representative scenarios is a primary challenge. A scenario model needs to
account for complex components, such as roads, infrastructure, road users, and their behaviors and
interactions. Ontology-based frameworks are proposed to model scenarios in a detailed manner. However,
some limitations exist, such as (i) expressing dynamic behaviors, (ii) the capacity in complex scenario
modeling to achieve more realistic simulation; and (iii) ensuring comprehensive ontology coverage and
plausibility. This paper proposes an ontology framework addressing these shortcomings. A comparative
evaluation is conducted using the developed quantitative metrics to assess the ontology framework against
two other industrial ontologies.
1 INTRODUCTION
Automated Driving (AD) and Advanced Driver-
Assistance Systems (ADAS) present an important
evolution in automotive technologies, aiming to
enhance road safety and reduce human error. The
complexity of real-world driving environments
requires rigorous validation to ensure these
technologies are safe. Scenario-based Testing (SbT)
has the potential to accelerate safety validation. A
scenario describes a specific environment that an
AD/ADAS-equipped vehicle could encounter in the
real world.
Properly modeling representative driving
scenarios is a primary challenge for SbT in both real-
world and simulated environments. Diverse and
complex scenarios can assess the safety of AD/ADAS
in virtual simulation without risks and costs currently
associated with real-world testing. Building a
scenario model requires an in-depth knowledge and
understanding of traffic and environments.
Modeling scenarios using ontologies provides a
suitable framework for validation and testing of
Automated Driving (Armand et al., 2014). Ontology-
based modeling offers a flexible formalism for
managing complex knowledge, which serves as the
foundation for defining, generating, or identifying
scenarios.
However, current ontology-based scenario
modeling frameworks are facing challenges in
covering various elements, expressing dynamism of
driving behaviors, and effectively modeling complex
scenarios.
In the present paper, the challenges of existing
ontologies are presented in Section 2. In the
subsequent Section 3, a new ontology framework for
scenario modeling is proposed to capture the
complexity of real driving environments more
effectively. A preliminary ontology evaluation
method using a comparative approach is conducted in
Section 4, applied on the existing latest industrial
ontology frameworks. Section 5 concludes the
contribution of the presented framework.
2 RELATED WORKS AND
CHALLENGES
Current scenario modeling ontologies are built, from
a structural and organizational perspective, using
hierarchical layered models (Bagschik et al., 2018;
622
Cui, Z., Dicheva, S., Abdin, A., Yannou, B. and Giroux, J.-M.
Enhancing Scenario-based Testing for Automated Driving Systems: An Ontology-Based Scenario Modeling Framework.
DOI: 10.5220/0013438800003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 622-630
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

Scholtes et al., 2021; Schuldt et al., 2013), block-
based categorical structures (de Gelder et al., 2022;
Erz et al., 2022; Li et al., 2020), or their fusions
(Armand et al., 2014; ASAM, 2022; Chen & Kloul,
2018; Westhofen et al., 2022). Previous research
works have accounted for a wide range of knowledge
within the driving domain, and diverse elements have
been integrated into these ontologies. While existing
models have made notable progress, there are still
limitations leading to the need for new improvements
to overcome these challenges.
2.1 Expressing Dynamics in Scenario
Modeling
The symbolic nature of ontologies limits the
expressiveness of dynamism in driving scenarios. In
previous research, dynamic descriptions are
commonly defined and encapsulated in the layer or
module named Dynamic Objects, Dynamic Entities,
Dynamic Elements, or Traffic Participant (ASAM,
2022; Bagschik et al., 2018; Erz et al., 2022; Scholtes
et al., 2021; Schuldt et al., 2013). The layer
incorporates behavioral descriptions, including (1)
states: position, speed, acceleration; (2) actions:
maneuvers and triggering events; (3) intentions &
interactions: behaviors and activities.
These symbolic concepts lack the ability to
express the spatial-temporal evolution of objects.
Realistic dynamism relies on both temporal and
spatial scales. While typically defined with discrete
scenes, the relationships and dependencies between
scenes are underrepresented in ontologies, failing to
capture the continuous evolution of objects.
On the other hand, the spatial occupation of
objects is often modeled through lane occupancy and
relative positioning, such as when the EGO vehicle is
driving on a lane and another vehicle is in its left rear.
The gap between these high-level symbolic
representations and the fine-grained occupancy grid
(Elfes, 1989) highlights the need for an approach to
bridge discrete symbols and continuous spatial data.
2.2 Complex Scenario Modeling
Traffic participants who do not directly influence the
behavior of the EGO vehicle are often excluded from
actual scenario modeling. While they may not
directly impact the validation of AD/ADAS functions
(Geyer et al., 2014), their presence is necessary to
reflect realistic traffic environments.
In realistic driving environments, multiple traffic
participants are present and interact. A considerable
difficulty is to describe interactive driving behaviors
of multiple road users with a generalized modelling
framework.
The trigger-action mechanism is widely used to
formalize scenarios and is sufficient to model less
complex ones, such as those in the Car-to-Car Rear
(CCR) series in the NCAP protocol concerning
Automated Emergency Braking (AEB) function.
However, this trigger-action practice is not well-
suited for modeling scenarios involving multiple road
participants because of simultaneous interactions or
coordinated behaviors in real-world environments.
Additionally, validating an AD/ADAS function
requires a minimum test duration, such as 5 minutes
for validating the lane-keeping capacity as required
by the regulation (UNECE, 2021).
2.3 Coverage and Plausibility of
Modeled Scenarios
Existing works have not addressed the issue of
ontology coverage. The review (Zipfl et al., 2023)
proposed a categorical coverage measure, using a
checklist-based approach to determine whether an
ontology covers certain categories of elements, such
as lane marking properties of the road. While
informative, this comparative review is insufficient
for comprehensive coverage evaluation.
The problem is further related to the absence of a
baseline ontology for scenario modeling. Under the
Open-World Assumption, it is impossible to claim
that an ontology covers sufficient elements or is
complete when the baseline is missing.
Furthermore, the non-plausibility of scenario
modeling was not discussed in the literature. The
existing approaches bypass the necessary
relationships and constraints that ensure scenarios
remain valid. This can lead to modeling unrealistic
scenarios, such as inappropriate or incompatible
elements.
3 PROPOSED ONTOLOGY
FRAMEWORK
An enhanced ontology-based scenario modeling
framework is proposed and developed for AD/ADAS
validation. The framework articulates refined
ontology concepts in natural language and connects
them through relations and constraints, addressing
dependencies, mutual exclusions, and other factors
relevant to validating AD/ADAS functions.
Furthermore, this framework adapts spatial
definitions to describe traffic participants within
Enhancing Scenario-based Testing for Automated Driving Systems: An Ontology-Based Scenario Modeling Framework
623

scenarios. The framework accounts for the
complexity of real driving environments.
3.1 Refined Ontology Structure and
Modules
In this paper, the proposed framework organizes four
modules in ScenarioDomain to describe dynamic
scenarios: Scenery, Dynamic Elements,
Environmental Conditions, and Goals, as shown in
Fig. 1. Scenery and Environmental Conditions
provide static and environmental descriptions of
scenarios. The Dynamic Elements module refines
Maneuvers, Activities, and Behaviors for dynamic
descriptions. The Goals module outlines validation
objectives related to AD/ADAS requirements. The
ontology elements, including concepts, properties,
and axioms, are developed using Protégé Software
(Noy et al., 2003).
Considering their use in automatic scenario
generation, this framework organizes separately these
descriptive elements with the layered containers.
These containers serve as Components to form
scenarios. A set of defined relationships contributes
to associate elements, encapsulating concepts of
Domain into containers of Components. This
approach ensures the modularity and efficient
composition of elements. For example, a Scenario
occurs in a Zone, which consists of a RoadNetwork,
including one or multiple Roads depending on the
type of RoadNetwork, and so on. The four modules,
organized as Domain, specify these container
concepts. For example, each TrafficParticipant has its
type and a set of Behaviors which involves
Maneuvers, while the interactions of
TrafficParticipants are formed and represented as
Activities.
Figure 1: Concept hierarchy of the proposed ontology-
based framework.
Besides, constraints are integrated in this ontology
framework, to reduce non-plausible scenarios. For
example, a pedestrian crossing road marking cannot
exist on a highway, this mutual exclusion constraint
between elements ensures semantic integrity. And
other constraints improve the logical consistency and
reduce modeling error, such as compatibility
constraints, a speed limit of 110km/h is incompatible
with a roundabout or a crossroad intersection. These
restrictions ensure the validity of scenario modeling.
The actual framework defined more than 200
constraints to improve the modeling quality for
Scenario-based Testing.
The Maneuvers formalize driving actions, such as
Accelerate, TurnRight (heading to right), Stop; and
non-driving ones, like UseTurnIndicator, HonkHorn.
The Activities module includes road user interactions,
from the perspective of each road user.
An Activity is defined as a combination of
maneuvers of multiple road users. A scenario
contains one or multiple activities describing
scenarios, for example, a vehicle CloseUp to another,
then Overtake it.
The Behaviors enhance the dynamic description
of both AD/ADAS-equipped vehicles and other road
users within scenarios. Behaviors are associated with
a series of maneuvers, for instance, the CarFollowing
behavior involves a sequence of maneuvers
Accelerate, Decelerate, ConstantSpeed, and Stop.
This module incorporates the taxonomies from
(NHTSA, 2018), which also include MaintainSpeed,
LaneCentering, ObstacleAvoidance, among others.
For example, MaintainSpeed refers to maintaining a
safe speed set through longitudinal control with
acceptable following distances.
Testing Goals in the Goals module, this module
emphasizes the purpose of modeling traffic
participants, specifically aligning with behaviors of
AD/ADAS functions that should be achieved within
a scenario. They are aligned with the behavioral
competencies of AD/ADAS functions, using the
taxonomies from (AVSC, 2021). A well-defined set
of testing goals helps clearly identify the behaviors
that need to be assessed in scenarios. For example, for
an Adaptive Cruise Control (ACC) function,
RespondingToOtherVehicles is a primary testing
goal. To ensure safety, an ACC-equipped vehicle
must demonstrate behaviors such as MaintainSpeed,
CarFollowing, and ObstacleAvoidance within
scenarios.
3.2 Spatial Segmentation and Layout
A surrounding location layout is proposed to describe
objects' occupation and surrounding locations. The
layout illustrates lanes as a grid-like pattern, where
each cell corresponds to a specific area within the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
624
road network, defined by the lateral and longitudinal
segmentation.
This layout divides a standard lane into three
parts, as shown as Fig. 2: the Left Adjacent Area (L),
the Central Area (C), and the Right Adjacent Area
(R). The widths of L-C-R are proportional to the total
lane width. For example, if a lane is 3.5 meters wide,
the segments measure 1m-1.5m-1m.
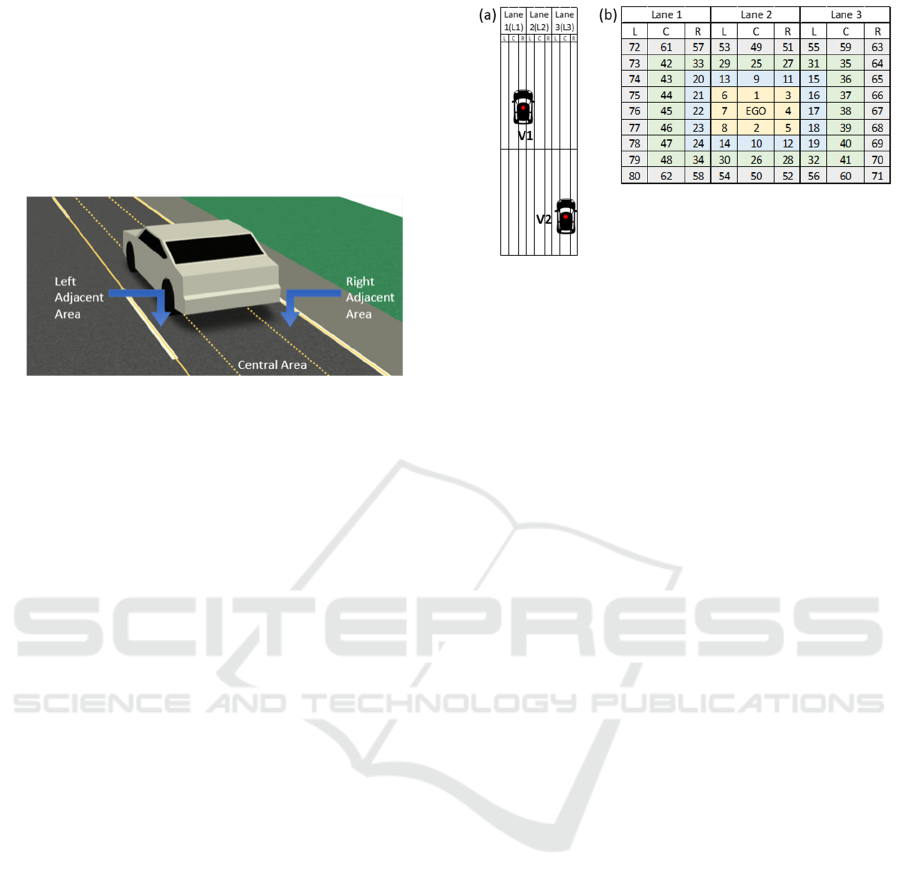
Figure 2: Illustration of the proposed lateral segmentation,
screenshot of a scenario running on the esmini simulator.
When the geometric center of a vehicle remains in
the Central Area of a lane, it is driving in that lane.
This proposed L-C-R lateral segmentation aims to
describe between-lanes behaviors, such as a vehicle
driving in the adjacent area of two neighboring lanes
or a lane change. As shown in Fig. 3 (a), the V1 drives
on the adjacent area between Lane 1 (L1) and L2,
more precisely on the Right Adjacent Area of Lane 1
(L1-R).
The longitudinal length of each layout cell
depends on the distance that the EGO vehicle drives
per N seconds. For instance, when the EGO vehicle is
driving 70 kilometers per hour, fixing N as 1 second,
each cell would be 20 meters long. This segmentation
improves the granularity of behavioral descriptions
This segmentation layout illustrates spatial
surroundings, and cells are numbered following the
same protocol in the standard ISO 34502 (ISO, 2022).
As shown in Fig. 3 (b), a standard three-lane road is
illustrated with respect to the proposed approach. The
central cell represents an AD/ADAS-equipped EGO
vehicle. Surrounding cells are numbered to indicate
their relative positions, facilitating the description of
spatial relations between the subject and other road
users.
This segmentation approach facilitates describing
the spatial occupation of road participants within a
scene. The detailed lane segmentation layout is better
suited for integration with behavioral concepts,
compared to occupancy grids (Elfes, 1989), which are
more aligned with concrete scenario presentations.
Figure 3: (a) Illustration of two vehicles driving within the
grid layout, with their geometric centers marked by red
dots; (b) Numbered spatial layout of a standard three-lane
road w.r.t. the grid numbering protocol of ISO 34502.
3.3 Temporal Sequence of the Spatial
Layouts
The sequence of spatial occupation representations
for traffic participants contributes to shaping a set of
scenarios. Each sequence represents the spatial
interaction of a vehicle from another vehicle’s
perspective and corresponds to an instance of traffic
activity defined within the Activity module of the
proposed ontology. Within a sequence, each spatial
occupation offers a brief snapshot of the relative
positioning and movement dynamics at a specific
moment in the scenario, i.e., the Scene (Ulbrich et al.,
2015). The following example illustrates the utility of
the temporal sequence in conjunction with the
segmentation layout.
As discussed in Section 3.1, ACC functions face
considerable difficulty in scenarios modeled to
evaluate their driving capability to
RespondingToOtherVehicles. The behaviors involve
maneuvers such as Accelerate, Decelerate,
ConstantSpeed, and Stop. A common and challenging
scenario is a cut-in, defined as an activity in the
framework, where another vehicle merges in front of
the ACC-equipped EGO vehicle.
The following Fig. 4 shows the sequence of
layouts to describe this scenario. Initially, V1 drives
parallel in the left lane of the EGO vehicle. V1 then
initiates a lane change, and merges into the lane of the
EGO vehicle. This sequence results from V1
performing the two combinations of Accelerate and
TurnRight, transiting from Fig. 4 (a) to (b), and then
to (c). This is followed by a single combination of
ConstantSpeed and TurnRight, moving from Fig. 4
(c) to (d).
Following the numbering protocol shown in Fig.
3 (b), the trajectory of V1 during this cut-in activity
follows the sequence of cases 45-21-13-9 in the grid.
Enhancing Scenario-based Testing for Automated Driving Systems: An Ontology-Based Scenario Modeling Framework
625

This sequence is one of possible sequences that
illustrate the cut-in activity. This representation of
behavioral dynamics bridges abstract scenario
descriptions with detailed scenario parameterization,
further aligning with real-world collected trajectory
data.
Figure 4: Sequence of grid layouts illustrating a vehicle
(V1) performs a cut-in activity, where V1 changes lanes and
merges into the same lane as the EGO vehicle (E).
Our ongoing work interests the needs of virtual
validation for existing AD/ADAS functions. We are
generating the occupation sequences to scale down
the scenario space, before exploring the infinite
situation-dependent concrete parameter generation.
The generated sequences are transformed into
filtering conditions, which are then applied to real
world databases for extracting corresponding
trajectories, such as the highD (Krajewski et al.,
2018) dataset. These sequences serve as an
intermediate layer, enabling the integration of
behavioral concepts of the ontology framework with
real-world data. By combining symbolic elements
with time series data, the approach generates the
necessary inputs needed to generate concrete
scenarios in XOSC format (ASAM, 2019).
On the other hand, the AD/ADAS requirements
are linked to behavioral descriptions through the
logical chaining of concepts. In the ACC example, the
Goal-Behavior-Maneuver chain narrows the scenario
space for maneuvers of the EGO vehicle. And
compatible interactions between EGO and non-EGO
vehicles, defined as Activities in the ontology
framework, are combined to complete the dynamic
scenario description.
3.4 Potentials in Complex Scenario
Modeling
The occupation sequences facilitate modelling
dynamics with a more generalized manner. Unlike the
current approach of defining trigger-action pairs in
scenario generation, occupation sequences are more
aligned with the real-world observation about driving
behaviors.
Each sequence represents a driving activity, and
the activity-based representations allow their
concatenation to model complex scenarios. The cut-
in activity, represented by the sequence of cases 45-
21-13-9 in Fig. 4, can be superimposed onto a single
layout representation, as shown in Fig. 5 (a). The
spatial-temporal evolution of V1 is depicted in a
single figure, with four red rectangles marking its
location and three arrows representing its maneuvers
in the scenario.
Figure 5: Illustration of overlaps of occupation layouts: (a)
V1 vehicle’s cut-in activity; (b) V2 vehicle’s close-up
activity and V3 vehicle’s move-away activity; (c) the fusion
of (a) and (b).
Combining activities can generate complex
scenarios. A vehicle V1 performs a cut-in activity due
to a slower leading vehicle V2 in Lane 1. This cut-in
activity is compatible with the V2’s close-up
sequence. Similarly, these activities can be combined
with vehicle V3’s move-away activity, as shown in
Fig. 5 (b). These three activities are logically
compatible, and their fusion allows the creation of a
complex scenario, illustrated in Fig. 5 (c).
Additionally, concatenating sequences also can
produce complex scenarios. For instance, the vehicle
V1 may execute a cut-in and then move away,
increasing its distance from the EGO vehicle. In this
case, the sequences of V1 and V3 could be
concatenated to define a more complex scenario.
4 PRELIMINARY ONTOLOGY
EVALUATION
A comparative approach is conducted to evaluate the
enhanced ontology framework with other existing
ones. Two scientific and industrial ontologies were
compared: the Automotive Urban Traffic Ontology
(A.U.T.O.) (Westhofen et al., 2022) and the ASAM
OpenXOntology (ASAM, 2022). Both ontologies are
accessible from Github and the ASAM website.
The A.U.T.O. ontology, a nested ontology which
implements the 6-layer model (Scholtes et al., 2021),
offers a series of ontology blocks to modularize
distinct domain elements. Inter-module connections
are established through the foundational ontologies,
such as GeoSPARQL for geometry and W3C
standards for temporal aspects.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
626
The ASAM OpenXOntology, within the ASAM
OpenX ecosystem, serves as a semantic foundation
for knowledge representation in the AD/ADAS
domain. It provides a comprehensive structure and
terminology and is compatible with Scenario-based
Testing tools. In contrast to A.U.T.O., this industrial
ontology proposes an upper-level Core block to
interconnect elements in different modules.
4.1 Initial Comparison
Three ontology frameworks, as illustrated in Fig. 6,
share a similar structure of concept organization.
Consequently, this structural review is insufficient for
comparison. It resembles the checklist-based
approach in (Zipfl et al., 2023), which limits the
comparison to the categorical or modular level.
Figure 6: Comparison on the structure of ontologies.
4.2 Quantitative Comparison
A statistical analysis of the proposed ontology was
conducted, along with the two ontologies. Following
an exploratory analysis, the three ontologies are
converted to graph-based representations to analyze
their concept hierarchy and structural organization.
Directed acyclic graphs were built to illustrate and
analyze the overlapping elements among ontologies.
This analysis used an automatic knowledge extraction
tool that we developed with the RDFLib library in
Python.
Four metrics are proposed and applied in these
ontologies: the Connectivity Index, the Property
Utility Ratio, the Redundancy Ratio, and the Branch
Balance.
Connectivity Index (CI) measures the density of
relationships and constraints per concept, calculated
as the total number of relationships and restrictions
divided by the number of concepts. A higher CI
indicates stronger interconnections among concepts.
The Property Utility Ratio (PUR) assesses
expressiveness by dividing the total number of
relationships and constraints by the sum of object and
data properties. A higher PUR implies a more densely
expressed ontology.
The Redundancy Ratio (RR) measures the
proportion of concepts having multiple parent
concepts within the directed acyclic graph. It helps to
identify the degree of overlap and assess unnecessary
structural complexity. The RR is calculated as 1
minus the proportion of unique concepts relative to
the total number of nodes in the ontology.
The Branch Balance (BB) reflects the distribution
of nodes in different branches. It is calculated with the
average entropy of all nodes in the graph, using the
proportion of each node’s subtree size relative to the
total number of nodes. A higher BB score indicates a
balanced structure, which enhances parsing and
searching within the ontology, facilitating its
automatic processing in applications. This metric may
identify imbalances within the ontology, where
branches are insufficiently developed or excessively
complex.
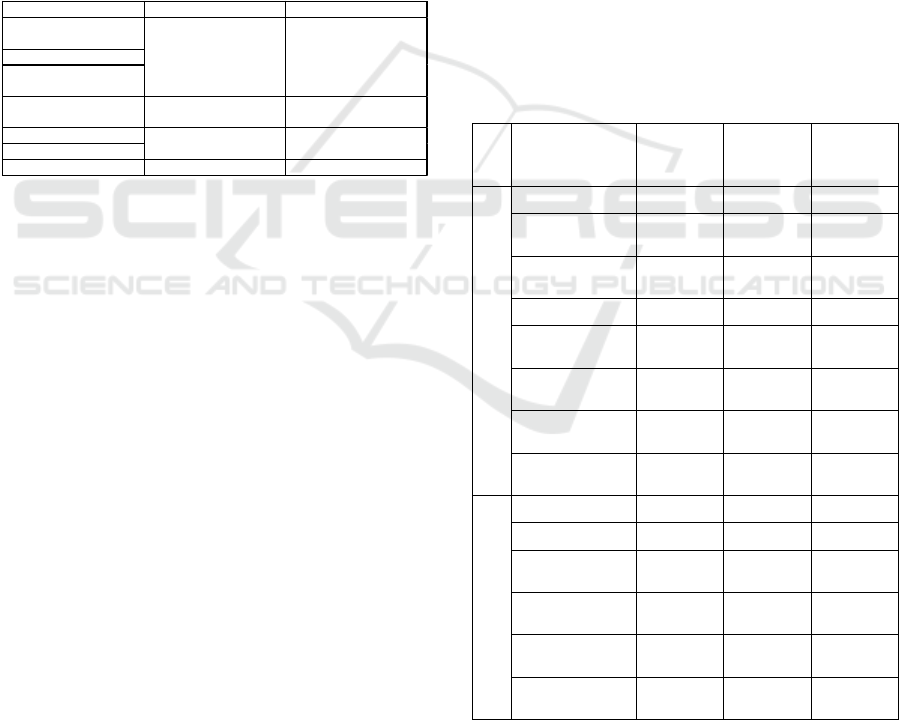
Table 1 presents the statistical analysis of the
ontology elements, the graph-based representations,
and the evaluation of key metrics.
Table 1: Statistics and graph-based analysis.
A.U.T.O.
OpenXOn
tology
Proposed
Ontology
Statistics
Nb. Concepts 284 346 240
Nb. Object
Pro
p
erties
118 96 37
Nb. Data
Properties
70 2 1
Nb. Individuals 110 348 286
Nb.
Relationships
2682 3030 2283
Nb.
Restrictions
43 24 256
Connectivity
Index
9.59 8.83 10.58
Property
Utilit
y
Ratio
14.49 31.16 66.82
Graph-based
Nb. Nodes 595 2272 240
Nb. Edges 582 2270 232
Nb. Leaf
Nodes
370 1645 191
Nb. Levels of
Nodes
11 13 7
Redundancy
Ratio
52.3% 84.8% 0%
Branch
Balance
0.86 1.46 1.76
The A.U.T.O. integrates more object and data
properties compared to the others. However, the
interconnections between concepts are limited, as
indicated by the CI and PUR metrics.
A.U.T.O. OpenXOntology Proposed Ontology
L1 Road Network and Traffic
Guidance Objects
L2 Roadside Structures
L3 Temporary Manipulation
of L1 and L2
L4 Dynamic Objects
Traffic Participant and
Behavior
Dynamic Elements
L5 Environment Conditions
L6 Digital Information
XXGoals
Road Topology and Traffic
Infrastructure
Scenery
Environmental Condition Environmental conditions
Enhancing Scenario-based Testing for Automated Driving Systems: An Ontology-Based Scenario Modeling Framework
627
OpenXOntology, while containing an impressive
number of nodes in its directed acyclic graph, suffers
from a high degree of concept overlap, as shown by
the RR metric, which reduces its practicality for
applications.
The proposed ontology framework introduces
fewer concepts and properties, but integrates a
substantial number of relations and restrictions,
particularly reflected in the CI and PUR metrics. Its
acyclic graph representation shows simplified and
well-balanced branches, as highlighted by the RR and
BB metrics, makes it suited for further applications,
such as automated scenario generation.
4.3 Conceptual Consistency
Concerning the absence of a baseline for scenario
modeling ontology, a preliminary approach was
employed to validate the ontology concepts against
international standards. The ISO 34504:2024
standard (ISO, 2024), an internationally recognized
normative document for scenario annotation and
categorization, offers a comprehensive set of
concepts for scenario modeling.
Using ChatGPT
1
, the terminology and taxonomy
of the ISO 34504 were extracted. This process
generated a taxonomy with 495 distinct concepts,
which was then verified by two human reviewers.
Next, each of these 495 concepts and the concepts
in the three ontologies were transformed into a 3072-
dimensional word vector using ChatGPT’s pre-
trained text-embedding-3-large model. This
transformation enabled us to capture the semantic
nuances and contextual relationships inherent in the
concepts. Cosine similarity between concepts was
calculated. This similarity metric provided a
quantitative measure of the alignment between the
standard and the ontology, offering insights into their
conceptual consistency.
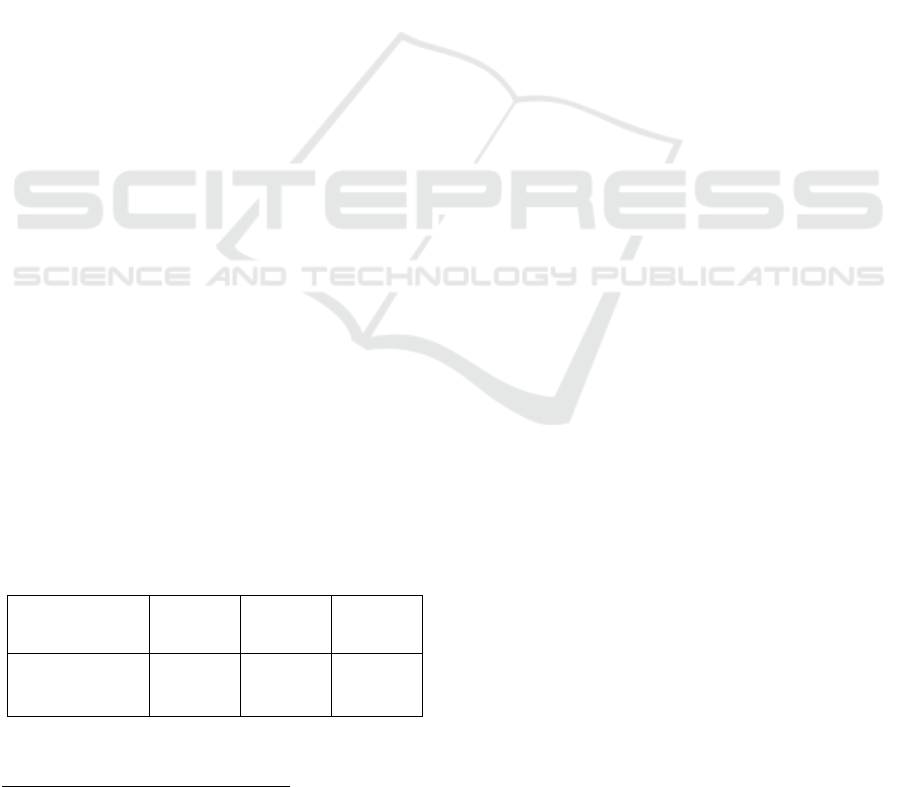
Table 2 presents the aligned concepts between
each ontology and the ISO standard.
Table 2: Aligned concepts between ontologies and ISO
34504 standard (the threshold Cosine similarity > 0.85).
A.U.T.O.
OpenXO
ntology
Proposed
Ontology
Nb. Concepts
aligned with
ISO 34504:2024
10 51 39
1
https://chatgpt.com/share/66ea2eb1-46e4-800b-9653-
744e1a321ed8
4.4 Discussion
Ontology evaluation poses significant challenges for
real-world applications, particularly in complex
domains such as AD/ADAS validation. In this work,
we have explored and addressed the quantitative
aspects of ontology evaluation, with a focus on
structural and terminological aspects. These
evaluations highlight the importance of building an
ontology that is concise enough for effective scenario
modeling while still being comprehensive enough to
capture a wide range of scenarios.
A key challenge remains in evaluating semantic
relations. The quantity and quality of relationships
and restrictions directly impacts the realism and
plausibility of scenarios. Poorly modeled relations
can lead to oversimplified or non-plausible scenarios,
which reduces the reliability of Scenario-based
Testing for AD/ADAS validation. Our ongoing work
focuses on evaluating the semantic relations between
concepts and their relationships across different
ontologies, using word embedding models. We aim to
capture the nuanced similarities and differences in
how knowledge is represented and interconnected for
scenario modeling.
This evaluation work did not systematically
investigate the well-known modeling issues in
semantic relations, such as those identified by
(Poveda-Villalón et al., 2014). However, during an
initial investigation, a few modeling errors were
identified when comparing ontologies. For example,
in the A.U.T.O. ontology, there is a relation “Cloud
is_part_of exactly 1 Sky,” representing a subset
composition between Cloud and Sky concepts. While
a constraint “Cloud disjoint_with Moon, Sun, Air,
Ground, Air_Particle, Sky, Wind” declares a disjoint
relation between Cloud and Sky. Here, a subset
relation cannot be compatible with a disjoint
constraint.
5 CONCLUSION
This paper identifies critical gaps in existing
ontology-based scenario modeling frameworks that
limit the effectiveness of modeling scenarios for
validating AD/ADAS functions. These challenges
include the issues with ontology coverage and the
plausibility of modeled scenarios, the limitations in
expressing dynamic scenarios, and the capacity to
model complex scenarios that are aligned with the
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
628

operating conditions and requirements of AD/ADAS
validation.
To address these gaps, this paper makes several
contributions. Firstly, the behavioral descriptions of
dynamic objects within scenarios are refined. This
refinement allows a more nuanced representation of
dynamic objects’ actions and interactions. Second,
the ontology framework develops relations and
constraints associated with the Goals, Behaviors,
Maneuvers, and Activities are developed in this
ontology framework. These relationships and
restrictions are particularly useful in determining the
relevance of scenarios for AD/ADAS validation.
Third, lane segmentation and grid layout are
introduced to enhance the modeling capability of real-
world traffic environments. Fourth, activity-based
combinations for scenario modeling have been
introduced. By combining the activities of dynamic
objects, the proposed model allows for a detailed
description of the spatial-temporal changes in a
scenario. Moreover, multiple activities can be
combined in sequence, enabling the concatenation of
scenarios. These contributions enhance the quality of
the ontology framework for valid, detailed, and
complex scenario modeling. This work lays a
foundation for more effective scenario generation for
AD/ADAS validation.
This paper also contributes to quantitative
evaluation of ontologies, offering a systematic
approach to assess the structural and terminological
aspects. This evaluation highlights key strengths and
areas for improvement, supporting the development
of more robust and practical ontology-based scenario
modeling framework for AD/ADAS validation.
ACKNOWLEDGEMENTS
We would like to extend our sincere gratitude to
ALTEN Labs for their invaluable support throughout
this work. This research was also supported by the
ANRT (Association Nationale de la Recherche et de
la Technologie) through a CIFRE (Conventions
Industrielles de Formation par la REcherche)
fellowship.
REFERENCES
Armand, A., Filliat, D., & Ibañez-Guzman, J. (2014).
Ontology-based context awareness for driving
assistance systems. 2014 IEEE Intelligent Vehicles
Symposium Proceedings, 227–233.
https://doi.org/10.1109/IVS.2014.6856509
ASAM. (2019). ASAM OpenSCENARIO.
https://www.asam.net/standards/detail/openscenario/
ASAM. (2022). ASAM OpenXOntology.
https://www.asam.net/standards/asam-openxontology/
AVSC. (2021). AVSC00008202111: AVSC Best Practice
for Evaluation of Behavioral Competencies for
Automated Driving System Dedicated Vehicles (ADS-
DVs) - SAE International. https://www.sae.org/
standards/content/avsc00008202111/
Bagschik, G., Menzel, T., & Maurer, M. (2018). Ontology
based Scene Creation for the Development of
Automated Vehicles. 2018 IEEE Intelligent Vehicles
Symposium (IV), 1813–1820. https://doi.org/10.1109/
IVS.2018.8500632
Chen, W., & Kloul, L. (2018). An ontology-based approach
to generate the advanced driver assistance use cases of
highway traffic. 2, 75–83. Scopus.
https://doi.org/10.5220/0006931700750083
de Gelder, E., Paardekooper, J.-P., Saberi, A. K., Elrofai,
H., Camp, O. O. den, Kraines, S., Ploeg, J., & De
Schutter, B. (2022). Towards an Ontology for Scenario
Definition for the Assessment of Automated Vehicles:
An Object-Oriented Framework. IEEE Transactions on
Intelligent Vehicles, 7(2), 300–314. IEEE Transactions
on Intelligent Vehicles. https://doi.org/10.1109/
TIV.2022.3144803
Elfes, A. (1989). Using occupancy grids for mobile robot
perception and navigation. Computer, 22(6), 46–57.
Computer. https://doi.org/10.1109/2.30720
Erz, J., Schütt, B., Braun, T., Guissouma, H., & Sax, E.
(2022). Towards an Ontology That Reconciles the
Operational Design Domain, Scenario-based Testing,
and Automated Vehicle Architectures. 2022 IEEE
International Systems Conference (SysCon), 1–8.
https://doi.org/10.1109/SysCon53536.2022.9773840
Geyer, S., Baltzer, M., Franz, B., Hakuli, S., Kauer, M.,
Kienle, M., Meier, S., Weißgerber, T., Bengler, K.,
Bruder, R., Flemisch, F., & Winner, H. (2014). Concept
and development of a unified ontology for generating
test and use-case catalogues for assisted and automated
vehicle guidance. IET Intelligent Transport Systems,
8(3), 183–189. https://doi.org/10.1049/iet-
its.2012.0188
ISO. (2022). ISO 34502:2022 Test scenarios for automated
driving systems—Scenario based safety evaluation
framework. https://www.iso.org/standard/78951.html
ISO. (2024). ISO 34504:2024 Road vehicles—Test
scenarios for automated driving systems—Scenario
categorization. https://www.iso.org/standard/
78953.html
Krajewski, R., Bock, J., Kloeker, L., & Eckstein, L. (2018).
The highD Dataset: A Drone Dataset of Naturalistic
Vehicle Trajectories on German Highways for
Validation of Highly Automated Driving Systems.
2018 21st International Conference on Intelligent
Transportation Systems (ITSC)
, 2118–2125.
https://doi.org/10.1109/ITSC.2018.8569552
Li, Y., Tao, J., & Wotawa, F. (2020). Ontology-based test
generation for automated and autonomous driving
Enhancing Scenario-based Testing for Automated Driving Systems: An Ontology-Based Scenario Modeling Framework
629

functions. Information and Software Technology, 117,
106200. https://doi.org/10.1016/j.infsof.2019.106200
NHTSA. (2018). A Framework for Automated Driving
System Testable Cases and Scenarios (p. 180).
https://www.nhtsa.gov/document/framework-
automated-driving-system-testable-cases-and-
scenarios
Noy, N. F., Crubézy, M., Fergerson, R. W., Knublauch, H.,
Tu, S. W., Vendetti, J., & Musen, M. A. (2003).
Protégé-2000: An Open-Source Ontology-
Development and Knowledge-Acquisition
Environment. AMIA Annual Symposium Proceedings,
2003, 953.
Poveda-Villalón, M., Gómez-Pérez, A., & Suárez-
Figueroa, M. C. (2014). OOPS! (OntOlogy Pitfall
Scanner!): An On-line Tool for Ontology Evaluation.
International Journal on Semantic Web and
Information Systems (IJSWIS), 10(2), 7–34.
https://doi.org/10.4018/ijswis.2014040102
Scholtes, M., Westhofen, L., Turner, L. R., Lotto, K.,
Schuldes, M., Weber, H., Wagener, N., Neurohr, C.,
Bollmann, M. H., Körtke, F., Hiller, J., Hoss, M., Bock,
J., & Eckstein, L. (2021). 6-Layer Model for a
Structured Description and Categorization of Urban
Traffic and Environment. IEEE Access, 9, 59131–
59147. IEEE Access. https://doi.org/10.1109/
ACCESS.2021.3072739
Schuldt, F., Saust, F., Lichte, B., Maurer, M., & Scholz, S.
(2013). Effiziente systematische Testgenerierung für
Fahrerassistenzsysteme in virtuellen Umgebungen.
https://doi.org/10.24355/dbbs.084-201307101421-0
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., & Maurer,
M. (2015). Defining and Substantiating the Terms
Scene, Situation, and Scenario for Automated Driving.
2015 IEEE 18th International Conference on
Intelligent Transportation Systems, 982–988.
https://doi.org/10.1109/ITSC.2015.164
UNECE. (2021). UN Regulation No. 157—Uniform
provisions concerning the approval of vehicles with
regard to Automated Lane Keeping Systems.
https://unece.org/transport/documents/2021/03/standar
ds/un-regulation-no-157-automated-lane-keeping-
systems-alks
Westhofen, L., Neurohr, C., Butz, M., Scholtes, M., &
Schuldes, M. (2022). Using Ontologies for the
Formalization and Recognition of Criticality for
Automated Driving. IEEE Open Journal of Intelligent
Transportation Systems, 3, 519–538. IEEE Open
Journal of Intelligent Transportation Systems.
https://doi.org/10.1109/OJITS.2022.3187247
Zipfl, M., Koch, N., & Zöllner, J. M. (2023). A
Comprehensive Review on Ontologies for Scenario-
based Testing in the Context of Autonomous Driving.
2023 IEEE Intelligent Vehicles Symposium (IV), 1–7.
https://doi.org/10.1109/IV55152.2023.10186681
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
630
