
A Study on the Comprehensibility of Behavioral Programming Variants
Adiel Ashrov
1 a
, Arnon Sturm
2 b
, Achiya Elyasaf
2 c
and Guy Katz
1 d
1
The Hebrew University of Jerusalem, Israel
2
Ben-Gurion University of the Negev, Israel
Keywords:
Scenario-Based Programming, Behavioral Programming, Empirical Software Engineering.
Abstract:
Behavioral Programming (BP) is a software engineering paradigm for modeling and implementing complex
reactive systems. BP’s goal is to enable developers to incrementally model systems in a manner naturally
aligned with their perception of the system’s requirements. This study compares two BP variants: classical,
context-free BP, and the more recently proposed Context-Oriented BP (COBP). While BP advocates simplic-
ity and modularity, COBP introduces context-aware constructs for handling context-dependent behaviors. A
practical question arises: which variant leads to reactive systems that are more comprehensible for develop-
ers? Through a controlled experiment with 109 participants, we evaluated both variants across two dimensions:
comprehension of execution semantics and identification of requirements from implementations. The results
indicate that BP generally leads to better comprehension and higher confidence; while COBP demonstrates
advantages in complex, context-dependent behaviors. These findings provide guidance for choosing between
BP variants based on system complexity and context-dependent requirements.
1 INTRODUCTION
As reactive systems evolve, developers often need to
enhance them. Some enhancements extend the sys-
tem’s functionality, for example, by adding a new
game strategy or implementing a new feature (Ashrov
and Katz, 2023). Other enhancements, sometimes re-
ferred to as guard rules or override rules (Katz, 2021),
prevent the system from entering undesired states or
performing unwanted actions — such as preventing
illegal moves in a game or ensuring safety constraints
in a robotic system. Both kinds of enhancements
must be carefully integrated with existing behaviors,
while maintaining the system’s overall requirements
and constraints, and this requires developers to com-
prehend the existing system before it can be modified.
Reactive systems are increasingly prevalent in do-
mains like robotics (Kaelbling, 1987), IoT (Curasma
and Estrella, 2023), and safety-critical applica-
tions (Dafflon et al., 2015).These systems grow more
complex as enhancements are introduced over time.
This, in turn, renders them increasingly difficult to
comprehend, both at the code level (Storey, 2005;
a
https://orcid.org/0000-0003-4510-5335
b
https://orcid.org/0000-0002-4021-7752
c
https://orcid.org/0000-0002-4009-5353
d
https://orcid.org/0000-0001-5292-801X
Brooks, 1983) and at the requirements level (Moran-
dini et al., 2011), and thus, more difficult to enhance.
The need to bridge this gap has led to the develop-
ment of specialized paradigms for modeling reactive
systems, with the goal of providing better comprehen-
sibility.
Behavioral Programming (BP) (Harel et al.,
2012b) is one such paradigm for modeling complex
reactive systems. The main focus of the paradigm
is to enable users to naturally model their perception
of the system’s requirements (Gordon et al., 2012).
In BP, developers define b-threads that describe what
must, may, or must not happen in the system. These
b-threads are then interwoven at runtime to generate
a cohesive system behavior. The paradigm is par-
ticularly well-suited for implementing reactive sys-
tems for several key reasons: (i) its natural alignment
with how humans think about system behaviors en-
ables developers to clearly specify safety constraints;
(ii) its modular b-thread architecture allows incremen-
tal addition of new behaviors without modifying ex-
isting code (Harel et al., 2015); and (iii) its amenabil-
ity to formal verification enables automated checking
of safety and liveness properties (Harel et al., 2011;
Harel et al., 2014).
Two main variants of BP have emerged in the lit-
erature: classical, context-free BP, which focuses on
252
Ashrov, A., Sturm, A., Elyasaf, A. and Katz, G.
A Study on the Comprehensibility of Behavioral Programming Variants.
DOI: 10.5220/0013440800003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 252-267
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

modeling desirable and undesirable behaviors; and
Context-Oriented Behavioral Programming (COBP),
where developers can also define the context in which
behaviors are relevant (Elyasaf, 2021b). Both vari-
ants aim to support the natural specification of system
behaviors, but their distinct approaches to organiz-
ing and expressing these behaviors raise an important
question: how do these paradigms affect the compre-
hensibility of reactive systems, particularly when they
are enhanced to meet evolving requirements?
RQ: Is a reactive system more comprehensible
when enhanced using classic behavioral program-
ming or context-oriented behavioral program-
ming?
To address this research question, we designed
and conducted a controlled experiment involving 109
engineering students. The experiment aimed to em-
pirically evaluate and compare the comprehensibility
of reactive systems enhanced using BP versus COBP.
We assessed participants on two criteria: (i) their abil-
ity to understand the system’s behavior and recognize
gaps between the implementation and the stated re-
quirements; and (ii) their ability to identify require-
ments from a given implementation. Thus, our study
contributes to understanding how the choice between
BP and COBP may impact system comprehensibility.
The experiment results show that classical BP
generally outperformed COBP in comprehensibil-
ity metrics such as correctness and confidence. In
particular, the BP group’s subjects were generally
more successful in understanding the system’s be-
havior and detecting misalignment between imple-
mentation and requirements. In addition, the BP
group’s subjects were more often successful in cor-
rectly identifying specifications from a given code,
and were more confident in their answers. How-
ever, COBP demonstrated an advantage for certain
complex, context-dependent guard rules. Overall,
these findings highlight the trade-offs between BP’s
simplicity and COBP’s flexibility for context-driven
tasks. We provide an extensive analysis of the exper-
iment and its conclusions in the following sections.
The rest of the paper is organized as follows. In
Sect. 2 we provide the background and discuss related
work. In Sect. 3 we provide an overview of the reac-
tive system we used in the experiment (called Taxi).
In Sect. 4 we describe the design of the controlled
experiment. In Sect. 5, we detail the experiment’s re-
sults, and then discuss them in Sect. 6. In Sect. 7 we
survey the threats to validity, and then conclude and
discuss future work in Sect. 8.
2 BACKGROUND
2.1 Behavioral Programming
Behavioral Programming (Harel et al., 2012b) is a
paradigm for modeling complex reactive systems.
The approach aims to enable users to naturally model
their perception of the system’s requirements (Gordon
et al., 2012). BP is well-studied and has been applied
in various domains (Gritzner and Greenyer, 2018;
Harel et al., 2016; Harel and Katz, 2014; Greenyer
et al., 2016). At the paradigm’s core lies the notion
of a b-thread: a description of a single behavior, de-
sirably a single requirement, which specifies either
a desirable or undesirable behavior of the modeled
system. Each b-thread is created independently and
has no direct contact with other b-threads. Instead,
it interacts with a global execution mechanism (Harel
et al., 2010), which can execute a set of b-threads co-
hesively.
A b-thread can be abstractly described as a transi-
tion system, in which the states are referred to as syn-
chronization points. Upon reaching a synchronization
point, the b-thread suspends its execution and declares
three types of events: requested events it wishes to
trigger, blocked events that are forbidden from its per-
spective, and waited-for events that are not explicitly
requested, but about which the b-thread should be no-
tified if they are triggered. The execution infrastruc-
ture then waits for all b-threads to synchronize and
selects an event for triggering that is requested and
not blocked. Subsequently, the mechanism notifies
the b-threads that requested or waited for the triggered
event. These notified b-threads then resume their exe-
cution until they reach the next synchronization point,
at which point the process repeats.
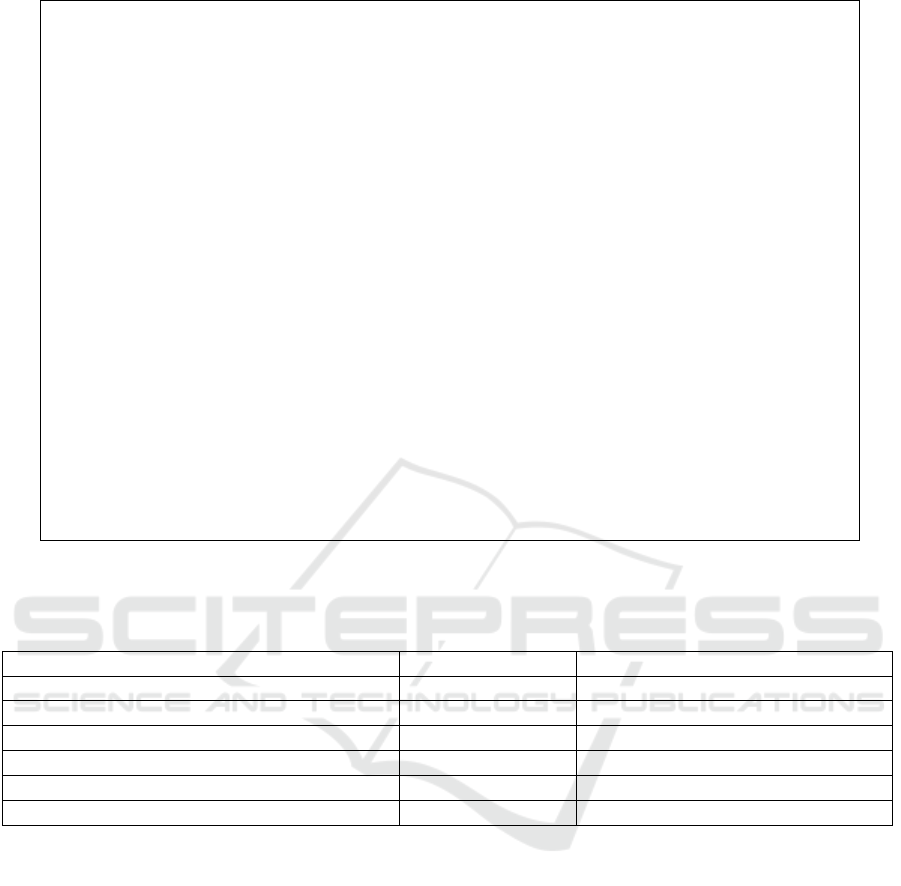
Fig. 1 (adapted from (Elyasaf, 2021b)) illustrates a
behavioral model of a simple system designed to con-
trol the lights and air-conditioner at a smart home. In
the smart home example, we have the following phys-
ical requirements: R1: there is a house with a single
room; R2: the room has a sensor, a smart light, and a
smart air conditioner; and R3: the room can either be
occupied or empty. In addition, we have the follow-
ing behavioral requirements: R4: when the room is
occupied, the light and then the air conditioner should
be turned on; R5: when the room is empty, the light
and then the air conditioner should be turned off; and
R6: when in EMERGENCY mode, the lights should be
kept on.
Requirements R1, R2, and R3 are supported
by sensors and actuators connected to the environ-
ment. The sensor threads inject the external events
into the system: NONEMPTYROOM, EMPTYROOM,
A Study on the Comprehensibility of Behavioral Programming Variants
253

EMERGENCY, and ENDEMERGENCY. The SMART-
ROOMON b-thread implements requirement R4. It
waits for the NONEMPTYROOM event, and requests
the event LIGHTSON followed by the AIRCON-
DITIONERON event. Symmetrically, the SMART-
ROOMOFF b-thread implements R5 and waits for the
EMPTYROOM event, and then requests the LIGHT-
SOFF event followed by the AIRCONDITIONEROFF
event. Finally, the EMERGENCYLIGHTS b-thread
addresses requirement R6: it waits for the EMER-
GENCY event and blocks the LIGHTSOFF event until
the emergency ends. These requirements are imple-
mented using the BPjs flavor of BP (Bar-Sinai et al.,
2018).
We notice a problematic pattern by examining the
implementation in Fig. 1. In the b-thread SMART-
ROOMON, we start by waiting for the NONEMPTY-
ROOM event that signals that the room is not empty.
Afterward, in every synchronization point, we wait
for the event EMPTYROOM. We wish to avoid per-
forming actions related to a non-empty room, if the
state has changed. The b-thread is not aligned with
R4 because it also specifies how we know that the
room is empty again, which is not defined in the re-
quirement. Therefore, if the requirement that spec-
ifies how we know that the room is empty changes,
the first two b-threads will change as well. Since in
BP, each b-thread should be aligned with a single re-
quirement, this pattern is problematic. A possible so-
lution is introducing the notion of Context to BP, as
described next.
2.2 Context-Oriented Behavioral
Programming
Context-Oriented Behavioral Programming
(COBP) (Elyasaf, 2021b) is an extension of Behav-
ioral Programming that facilitates the development
of context-aware systems, focusing on the natural
and incremental specification of context-dependent
behaviors. This is achieved by integrating BP with
context idioms that explicitly define when b-threads
are relevant and what information they require. The
core idea involves incorporating a behavioral model
with a data model that defines the context. There
is a link between the two models in the form of
update and select operations, and this connection
enables developers to address context-dependent
requirements. COBP has been applied to model
various reactive systems such as IoT (Elyasaf et al.,
2018), games (Elyasaf et al., 2019), and cellular
automata (Elyasaf, 2021b). For additional details on
COBP, please refer to (Elyasaf, 2021b).
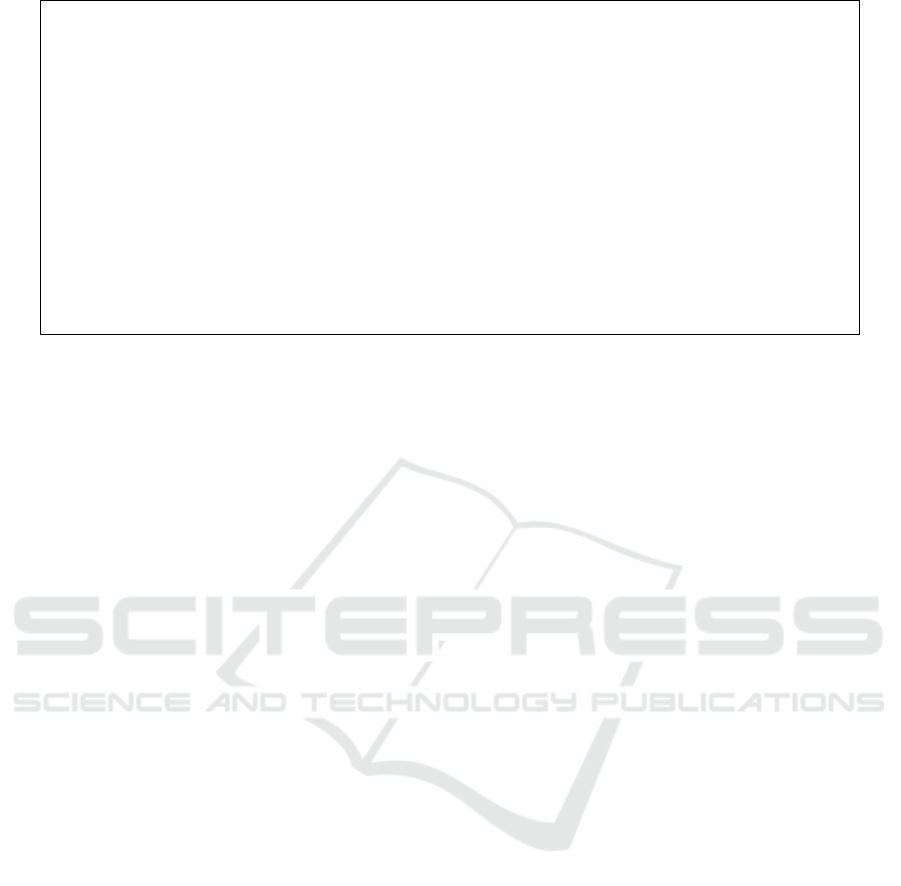
We now specify the smart home example using
COBPjs (Elyasaf, 2021a), a JavaScript package based
on BPjs that implements COBP. We start by defin-
ing the data model, which includes one room with
one member: occupied. Additionally, there is a mem-
ber indicating whether the emergency mode is active.
We then define three queries related to the room’s
state and emergency mode, to determine which of the
bound b-threads is relevant. The data model specifi-
cation addresses the physical requirements presented
in Sect. 2.1; it appears in Fig. 2.
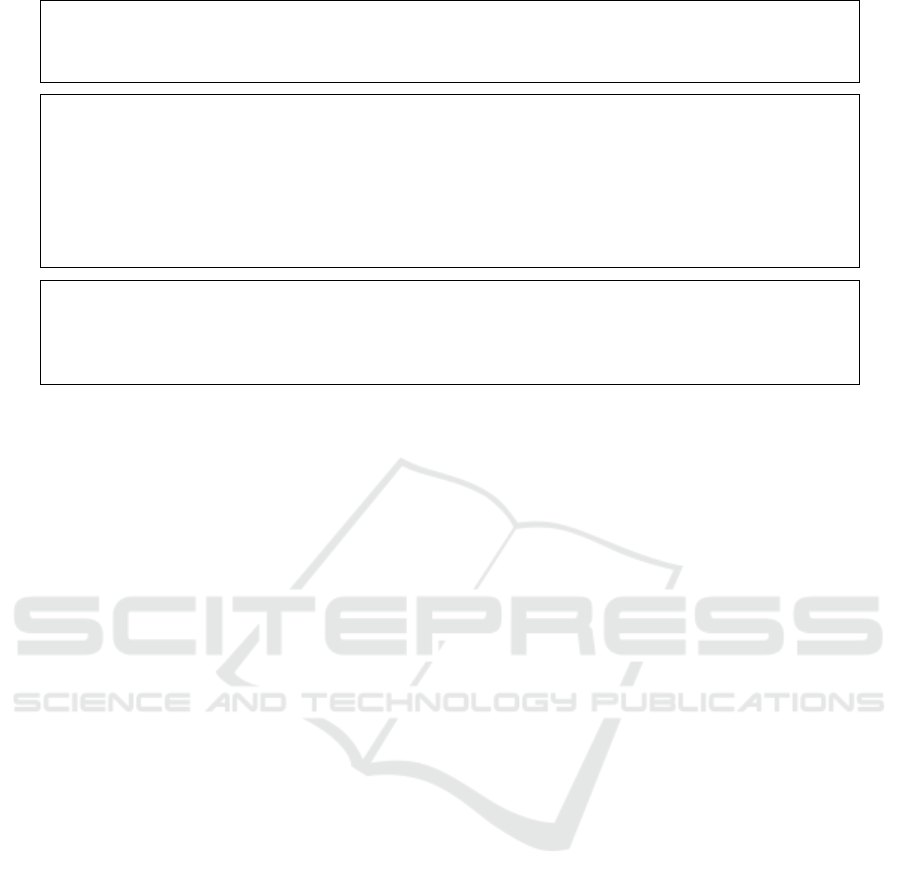
Next, we specify b-threads to implement the be-
havioral requirements (see Fig. 3). The b-threads are
now bound to the appropriate query (i.e., context).
Whenever there is a new answer to a query, a new
instance of the b-thread is spawned, and the answer
is given as a local variable to the b-thread. We say
that this local variable is the b-thread context. Simi-
larly, when a local variable is no longer a valid answer
to the query, we say that the context has ended, and
the b-thread execution is terminated. When the pro-
gram starts, there is one answer to the EMPTYROOM
query; therefore, only the SMARTROOMOFF b-thread
is executed. If a person enters the room, the EMPTY-
ROOM context is updated, and the SMARTROOMOFF
b-thread will be terminated.
Compared to the BP code presented earlier, the
COBP code aligns better with the requirements.
There is a separation between the questions of “How
do we know that we are in context A?” and “What
do we do in context A?”. For example, consider R5:
“When the room is empty, the light and then the air
conditioner should be turned off.” This requirement
does not specify how we know that we are in the con-
text of EMPTYROOM; it only specifies what to do in
this context. This difference becomes more apparent
when there are several manners to enter/exit a context,
and when many behaviors are bound to the context.
2.3 BP vs. COBP
Feature Comparison. While BP and COBP afford
the same expressive power, COBP’s integrated data
model (i.e., the context) enables data-sharing between
b-threads, and consequently the encoding of context-
dependent behavior. In BP, this ability is not sup-
ported natively, but can be achieved using various
workarounds (Katz et al., 2015; Harel et al., 2013),
e.g., by embedding the entire context in each event.
Such solutions add significant amounts of code to
the model and often weaken the alignment between
b-threads and requirements. In contrast, COBP’s
context-specific idioms and extended semantics fa-
cilitate the introduction of b-threads that are aligned
with context-dependent requirements. In addition, in
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
254

bp.registerBThread( "SmartRoomOn", function() {
while(true) {
bp.sync({ waitFor: bp.Event("NonEmptyRoom") });
lastEvent = bp.sync({ request: bp.Event("LightsOn"),
waitFor: bp.Event("EmptyRoom") });
if (lastEvent.name !== "EmptyRoom")
bp.sync({ request: bp.Event("AirConditionerOn"),
waitFor: bp.Event("EmptyRoom") });
}});
bp.registerBThread( "SmartRoomOff", function() {
while(true) {
bp.sync({ waitFor: bp.Event("EmptyRoom") });
lastEvent = bp.sync({ request: bp.Event("LightsOff"),
waitFor: bp.Event("NonEmptyRoom") });
if (lastEvent.name !== "NonEmptyRoom")
bp.sync({ request: bp.Event("AirConditionerOff"),
waitFor: bp.Event("NonEmptyRoom") });
});
bp.registerBThread( "EmergencyLights", function() {
while(true) {
bp.sync({ waitFor: bp.Event("Emergency") });
bp.sync({ waitFor: bp.Event("EndEmergency"),
block: bp.Event("LightsOff") });
}});
Figure 1: A BPjs model for controlling the lights and air conditioner at a smart home. Note that we wait for the event that
signals that the room state has changed in the relevant synchronization points.
terms of incrementality, both paradigms can model
desired/undesired behaviors that are not bound to a
specific context. The incrementality in COBP is im-
proved since it can address new context-dependent re-
quirements with new b-threads or updates to context
and without the modification of existing b-threads.
Table 1 contains a comparison of BP and COBP fea-
tures.
Cognitive Dimensions Comparison. We focus here
on the “cognitive dimensions” framework for char-
acterizing programming languages (Green and Pe-
tre, 1996; Green, 1989), as it aligns well with our
goal of comparing the structural and notational as-
pects of BP variants. There exist additional rele-
vant frameworks, such as “cognitive load theory”
(CLT) (Sweller, 1988), which evaluates the men-
tal effort and its impact on learning and problem-
solving efficiency during comprehension tasks; we
leave these for future work.
We compare the BP variants along the three fol-
lowing dimensions: (i) Hidden/explicit dependencies:
the degree to which relationships between different
parts of the model are visible and clear to the de-
veloper. These dependencies can occur in BP/COBP,
where a b-thread requesting a series of events might
affect a different b-thread waiting for these events
which is not immediately visible. In addition, in
COBP, a triggered event might update the context,
affecting context-dependent b-threads that the devel-
oper may not readily see; (ii) Role-expressiveness:
the ease of understanding each component’s role in
the system. In BP, when there is a perfect align-
ment between the requirements and the implementa-
tion, it should be simple to understand the role of the
b-thread because it should address a single require-
ment. In COBP, this ought to be true for context-
dependent requirements as well; and (iii) Hard mental
operations: cognitive challenges where notation itself
makes tasks harder. In BP/COBP, a hard mental op-
eration could be understanding which event should be
triggered by inspecting a synchronization point across
multiple b-threads that request/wait-for/block sets of
different events. In COBP, a hard mental operation
could be to maintain a mental image of the current
context, i.e., the schema, update functions, and rele-
vant queries in the data model, while trying to com-
prehend the behavior of a b-thread in that context.
A Study on the Comprehensibility of Behavioral Programming Variants
255
ctx.populateContext([
ctx.Entity('r1', 'Room', { occupied: false }),
ctx.Entity('emergency', 'Emergency', { state: false })
]);
ctx.registerEffect('PersonLeavesRoom', function (data) {
let room = ctx.getEntityById(data.id)
room.occupied = false
});
ctx.registerEffect('PersonEntersRoom', function (data) {
let room = ctx.getEntityById(data.id)
room.occupied = true
});
ctx.registerQuery("NonEmptyRoom", entity =>
entity.type === 'Room' && entity.occupied === true);
ctx.registerQuery("EmptyRoom", entity =>
entity.type === 'Room' && entity.occupied === false);
ctx.registerQuery("Emergency", entity =>
entity.type === 'Emergency' && entity.state === true);
Figure 2: The data model of the smart home example in COBPjs. An effect function is activated when the event defined in its
name is selected for triggering. The effects that modify the emergency property are similar to those in this example.
Table 1: Comparison of BP and COBP features.
Feature BP COBP
Incrementality Yes Improved
Architecture Behavioral Model Behavioral model and Data Model
Data sharing between b-threads Partial Yes
Context-specific idioms No Yes
Define context-dependent behavior Indirect Direct
Alignment with context-aware requirements No Yes
2.4 Related Work
Prior work has explored the integration of context-
awareness into Behavioral Programming (BP)
to model complex, context-aware reactive sys-
tems (Elyasaf et al., 2018; Elyasaf et al., 2019).
COBP, introduced in (Elyasaf, 2021b), extends BP
by enabling developers to define context-dependent
requirements explicitly, offering improved separation
of concerns and reduced coupling. The COBP paper
compared BP and COBP by highlighting their dis-
tinct characteristics and BP’s limitations in modeling
context-based requirements. In addition, prior work
by (Ashrov et al., 2017) validated the comprehen-
sibility of systems enhanced using BP versus BP’s
structured idiom set through a controlled experiment.
Building on these efforts, the present work is the first
to empirically compare the comprehensibility of a
reactive system modeled using BP vs. COBP.
BP has proven effective in modeling reactive sys-
tems across various domains, including cache co-
herence protocols, robotics, web applications, and
IoT systems (Harel et al., 2016; Corsi et al., 2024;
Ashrov et al., 2015; Harel and Katz, 2014; Harel
et al., 2012a). Override rules, or runtime moni-
tors, have been implemented in diverse domains such
as robotics, drones, and autonomous systems (Phan
et al., 2017; Desai et al., 2018; Schierman et al.,
2015). Recent work has also demonstrated the fea-
sibility of designing safety constraints for deep learn-
ing systems using BP (Katz, 2021; Ashrov and Katz,
2023). While these studies focus on functionality,
our study uniquely examines the impact of BP and
COBP on developers’ ability to comprehend systems
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
256
ctx.bthread( "SmartRoomOn", "NonEmptyRoom", function(room) {
sync({ request: Event('LightsOn', {id: room.id}) });
sync({ request: Event('AirConditionerOn', {id: room.id}) });
});
ctx.bthread( "SmartRoomOff", "EmptyRoom", function(room) {
sync({ request: Event('LightsOff', {id: room.id}) });
sync({ request: Event('AirConditionerOff', {id: room.id}) });
});
ctx.bthread( "EmergencyLights", "Emergency", function(entity) {
let room = ctx.getEntityById('r1');
sync({ block: Event('LightsOff', {id: room.id}) });
});
Figure 3: The behavioral layer of the extended smart home example in COBPjs. Note that for every new answer to the defined
query, a new instance of the b-thread is created, with the answer provided as a parameter to the b-thread function.
equipped with such rules.
3 TAXI — A REACTIVE SYSTEM
For our controlled experiment, we used the Taxi en-
vironment (Dietterich, 2000), which involves a taxi
navigating to passengers in a grid world, picking them
up, and dropping them off at one of four possible lo-
cations. This event-based, reactive system is popu-
lar in the Reinforcement Learning (RL) (Sutton and
Barto, 1999) community as a toy environment, but is
also sufficiently complex and could be extended as
part of our experiment. A full description of the en-
vironment can be found at the Gymnasium package
website (Taxi, 2024).
We designed various enhancements to the basic
Taxi system. These included both guard rules, de-
signed to prevent unwanted behavior by the system,
and also extensions that introduced new behavior that
the original system did not support. For example,
we added a rule to avoid in-place circles (inspired
by (Corsi et al., 2024)), and a rule for avoiding a turn
in a direction where there is a wall. We also intro-
duced a rule that prevented pickup/dropoff at a square
that is not a destination square (a regular square),
which is part of the Taxi’s specifications. We named
this guard rule GUARDAGAINSTILLEGALACTIONS,
and it appears in Fig. 4. Next, we extended Taxi with
the ability to refuel, avoid barriers placed in its path,
and pick up forgotten packages. These enhancements
were included in the questionnaire subjects answered
in the experiment (Ashrov et al., 2024a; Ashrov et al.,
2024b).
4 THE CONTROLLED
EXPERIMENT
In this section, we describe our BP vs. COBP experi-
ment’s design and execution, following the guidelines
from (Wohlin et al., 2012).
4.1 Hypotheses
Our experiment assessed comprehensibility through
two primary dimensions: comprehension and identifi-
cation.
• Comprehension was evaluated across two aspects:
– Execution semantics: The order of handled
events in the system.
– Alignment: The correspondence between re-
quirements and their implementation.
• Identification focused on participants’ ability to
determine the requirement addressed by a given
implementation.
Each dimension was measured using three depen-
dent variables: correctness, confidence, and response
time. The following hypotheses guided the study,
framing the comparison between BP and COBP:
Overall Achievement Hypotheses (H
1
)
• H
1
0
: There is no difference in overall achievement
correctness between BP and COBP
• H
1
1
: BP has greater overall achievement correct-
ness than COBP.
We hypothesized that BP would show better over-
all performance due to its simpler model and more
straightforward learning curve.
A Study on the Comprehensibility of Behavioral Programming Variants
257
// Global events used by both b-threads
var directionEvents = [ Event('Up'), Event('Down'),
Event('Right'), Event('Left') ]
// Guard rule - BP
bthread( "GuardAgainstIllegalActions", function() {
while (true) {
stateEvent = sync({ waitFor: Event('State') })
if (taxiIsOnRegularsquare(stateEvent) === true)
sync({ waitFor: directionEvents,
block: [ Event('Pickup'), Event('Dropoff') ] })}});
// Guard rule - COBP
ctx.bthread( "GuardAgainstIllegalActions",
"TaxiIsOnRegularsquare", function(taxi) {
sync({ block: [ Event('Pickup'), Event('Dropoff') ] })});
Figure 4: The guard rule GUARDAGAINSTILLEGALACTIONS implemented in BP and COBP. The specification is: ‘There
are four designated pick-up and drop-off locations. Avoid picking up or dropping off passengers at non-designated loca-
tions’ (Taxi, 2024). These guard rules are relevant when the taxi is at a regular square.
Comprehension Task Hypotheses (H
2.1
-H
2.2
)
Execution Semantics (H
2.1
)
• H
2.1
0
: There is no difference in execution seman-
tics comprehension correctness between BP and
COBP.
• H
2.1
1
: BP has greater execution semantics compre-
hension correctness than COBP.
We hypothesized that understanding system
behavior would be easier in BP compared to COBP.
While COBP introduced a clear separation between
context and behavior, potentially leading to more
aligned implementations, this added complexity can
increase the cognitive load on developers, thereby
hindering their ability to fully comprehend the
system’s behavior.
Requirements Alignment (H
2.2
)
• H
2.2
0
: There is no difference in requirements
alignment comprehension correctness between
BP and COBP.
• H
2.2
1
: There is a difference in requirements align-
ment comprehension correctness between BP and
COBP.
We hypothesized a trade-off between BP and
COBP: BP’s compact syntax and direct definitions
potentially simplify translating requirements into
specifications. Conversely, COBP’s context idioms
may allow system specifications to align more closely
with the original requirements but at the cost of in-
creased complexity.
Specification Identification Hypotheses (H
3
)
• H
3
0
: There is no difference in specification identi-
fication correctness between BP and COBP.
• H
3
1
: There is a difference in specification identifi-
cation correctness between BP and COBP.
We hypothesized a trade-off: BP excels at cap-
turing high-level requirements but lacks explicit con-
text modeling, potentially resulting in mixed context-
behavior specifications that are harder to interpret.
On the other hand, COBP allows explicit modeling
of context-dependent behaviors, enabling a more de-
tailed specification but requiring a deeper understand-
ing of the interaction between behavior and context.
For each hypothesis (H
1
, H
2.1
, H
2.2
, H
3
), we also
evaluated participant confidence and task completion
time using the following format:
Confidence Hypotheses:
• H
x
C0
: There is no difference in participant confi-
dence between BP and COBP.
• H
x
C1
: There is a difference in participant confi-
dence between BP and COBP.
Time Hypotheses:
• H
x
T 0
: There is no difference in task completion
time between BP and COBP.
• H
x
T 1
There is a difference in task completion time
between BP and COBP.
Where x refers to the hypothesis number
(1, 2.1, 2.2, 3).
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
258

To evaluate these hypotheses, we designed tasks
that directly correspond to the dimensions of compre-
hension and identification. Each task was structured
to measure the dependent variables under controlled
conditions, allowing us to compare BP and COBP
systematically.
4.2 The Experiment’s Design
4.2.1 Independent Variable
The independent variable is the BP variant used to
specify the reactive system, with two alternatives: BP
and COBP.
4.2.2 Dependent Variables
The following dependent variables result from assess-
ing correctness, confidence, and response time for the
overall performance of the subjects, for the compre-
hension task, and the identification task.
• Total correctness: measures the correctness of all
the tasks. The variable is measured on a scale of
0-1, which is the percentage of correct answers.
• Total Avg. confidence: measures the Avg. confi-
dence level across the entire questionnaire (values
range is [0,5]).
• Total time: measures the time it took to solve the
two tasks of the questionnaire. Time is calculated
in minutes.
• Comprehension execution correctness: measures
the correctness of the relevant sub-task (scale of
[0,1]).
• Comprehension alignment correctness: measures
the correctness of the relevant sub-task (scale of
[0,1]).
• Comprehension confidence: measures the Avg.
confidence level of the subjects in the comprehen-
sion task (values range is [0,5]).
• Comprehension time: which measures the time it
took the subject to provide an answer for the entire
comprehension task. The time is self-measured by
the subjects and in minutes.
• Identification correctness: measures the solution
correctness for the identification task (scale of
[0,1]).
• Identification confidence: measures the Avg. con-
fidence level of the subjects in the identification
task (values range is [0,5]).
• Identification time: measures the time it took the
subject to provide an answer for the identification
task. The time is self-measured by the subjects
and in minutes.
4.2.3 Subjects
The participants in the experiment were students en-
rolled in the course on Software Quality Engineer-
ing at The Ben-Gurion University of the Negev. The
course covers software quality processes and mea-
sures, as well as different software testing approaches.
The students in the course belong to two distinct
groups: (i) the Information Systems Engineering
(ISE) program students in the third year of their stud-
ies; and (ii) the Software Engineering (SE) program
students in the fourth year of their studies. Both the
ISE and SE programs are bachelor’s level programs.
There is a difference in the curriculum of the two pop-
ulations: the ISE program focuses on the analysis,
design, development, implementation, and manage-
ment of information systems in organizations and so-
ciety, whereas the SE program emphasizes engineer-
ing methods for software construction and hands-on
software development experience.
We selected this population because the subjects
have experience in understanding requirements, com-
prehending code, and identifying gaps between the
two. This is a reasonable assumption since they have
implemented and maintained several software sys-
tems according to requirements during their studies
through homework assignments and projects. More-
over, these skills are required for successfully testing
software systems, a task the students learn and prac-
tice as part of the course.
Participation in the experiment was voluntary.
Nonetheless, students were motivated to participate
by being offered bonus points toward their course
grades based on their performance. Additionally, all
participants signed a consent form that explicitly in-
formed them they could withdraw from the experi-
ment at any time. The design and execution of the ex-
periment were approved by the ethics committees at
Ben-Gurion University of the Negev and the Hebrew
University of Jerusalem.
1
4.2.4 Training
At the end of the semester, the students were provided
with a lecture on BP where they learned about the
semantics of the package. Subsequently, they were
referred to an online course (Provengo, 2024) about
Provengo, a software testing package, which is based
on the principles of BP (Bar-Sinai et al., 2023). Af-
terward, they were assigned a homework task written
1
Ethics committee approval number: (BGU: SISE-
2024-38), (HUJI: CSE-2024-03).
A Study on the Comprehensibility of Behavioral Programming Variants
259

in Provengo where the students were required to test
a shopping cart software system.
In addition, the experiment session’s initial phase
familiarized participants with their assigned BP vari-
ant. This was achieved through a lecture covering
each variant’s core concepts and presenting exam-
ples of requirements, the code that implemented them,
and the expected behavior. One group learned about
COBP, and the other group learned about BP. Note
that the lecture on COBP was composed of a section
on BP and an additional section on COBP, while the
lecture on BP only contained a section on BP. Lastly,
the subjects received an online link to the presenta-
tion as a handout that could be used throughout the
experiment.
4.2.5 Tasks
We designed two versions of the same experimental
form, one written in BP (Ashrov et al., 2024a) and
the other written in COBP (Ashrov et al., 2024b).
Both forms evaluate participants’ understanding of
the same reactive system (the Taxi environment, see
Sect. 3). Each participant experienced only one of the
variants. The experiment form consists of four parts:
1. A pre-task questionnaire, in which we checked the
comprehension of BP core principles and mecha-
nisms.
2. The first task, in which participants were pre-
sented with a requirement and its implementa-
tion. They were then asked to answer what is
the expected behavior of the implementation and
whether it is aligned with the requirements. Ta-
ble 2 outlines the structure of the questions in
the first task, categorizing them by (i) program-
ming concept; (ii) presence of a bug (i.e., align-
ment/misalignment between the requirement and
implementation); (iii) number of code modules in
the question; (iv) average code lines per module.
3. The second task, in which participants were pre-
sented with an implementation and were asked to
identify the requirements fulfilled by the proposed
b-threads. Table 3 outlines the structure of the
questions in the second task, categorizing them
by (i) programming concept; (ii) number of code
modules in the question; (iii) average code lines
per module.
4. A post-task questionnaire about the participants’
perception of the assigned variant and its useful-
ness.
To ensure objective evaluation, we established
ground truth answers before the experiment. For com-
prehension questions, answers were validated by ex-
ecuting code in BPjs/COBPjs. For alignment and
identification questions, we documented the intended
requirements-implementation mappings, and multiple
researchers reviewed the answer key to ensure accu-
rate and objective grading.
The comprehension and identification tasks in our
experiment mirror common development scenarios in
the industry. Developers frequently need to under-
stand existing behavioral specifications when main-
taining software systems, especially when adding new
safety constraints or extending system functionality.
Similarly, developers often need to identify the re-
quirements implemented by existing code when doc-
umenting legacy systems or when they perform on-
boarding to new projects.
4.2.6 Execution
Prior to conducting the experiment, we performed a
pilot with third-year students from the Holon Institute
of Technology (HIT) learning about the visual repre-
sentation of reactive systems. The goal was to confirm
that the proposed training was sufficient for solving
questions in BP/COBP and to validate the readabil-
ity and clarity of the questionnaire. The experiment
took place at the Ben-Gurion University of the Negev,
during a dedicated three-hour session for COBP and
a three-hour session for BP. Nevertheless, the COBP
execution exceeded the time limit, lasting 3.5 hours,
because the COBP lecture contained more informa-
tion than the BP version and required an intermission.
While random assignment would have provided a
more balanced design, we opted for self-enrollment
to accommodate scheduling constraints, as the groups
met in different time slots. Students were not in-
formed that each group would solve a different ver-
sion. To mitigate potential selection bias, we verified
no significant differences in BP background between
groups (See Table 4 and Table 5) and conducted sep-
arate analyses for ISE and SE students to maintain
statistical power. The results across both programs
suggest that the uneven group sizes did not substan-
tially impact our findings. In future studies, we aim
to employ stratified randomization to further enhance
balance and robustness. In total, 109 students par-
ticipated in the experiment, with 66 enrolling in the
COBP group and 43 enrolling in the BP group.
5 EXPERIMENTAL RESULTS
In this section, we present the results of our controlled
experiment. The complete experimental data, includ-
ing raw results, and statistical analyses, is available in
our online repository (Ashrov et al., 2024c).
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
260
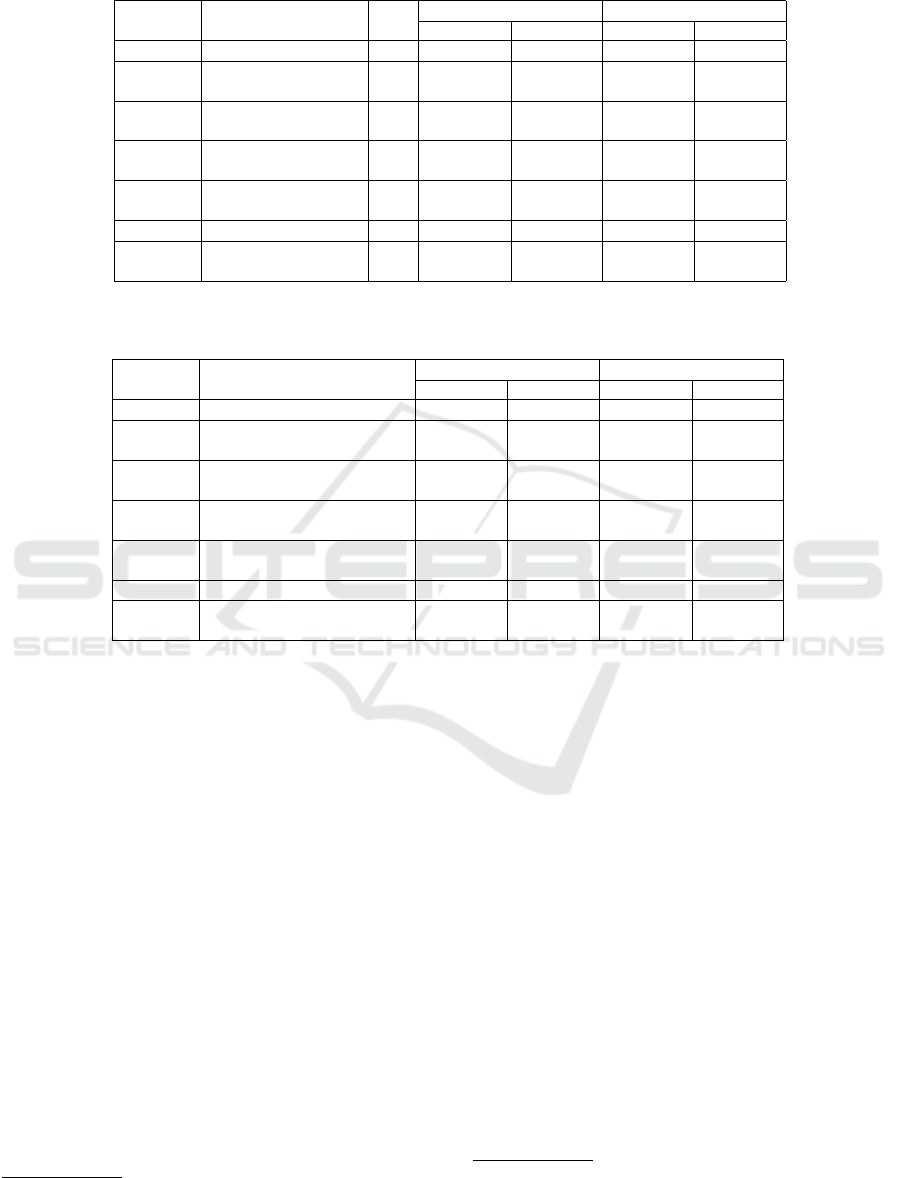
Table 2: Structure of questions in the first task (comprehension), detailing the question number, programming concept, bug
presence, and for each notation (BP/COBP), the number of code modules and average lines of code per module.
Question Concept Bug
BP COBP
#Modules Avg. code #Modules Avg. code
Q1 Encapsulation No 1 6 1 6
Q2 Guard — Block
Internal Event
Yes 2 5.5 2 5.5
Q3 Guard — Block
Single Event
Yes 3 3.33 5 3.4
Q4 Guard — Block
Multiple Events
No 3 4 6 4
Q5 Guard — Override
Event
No 2 7.5 8 3.125
Q6 Enhancement No 2 5 6 3.83
Q7 Enhancement with
Guard
Yes 3 5 8 3.875
Table 3: Structure of questions in the second task (identification), detailing the question number, programming concept, and
for each notation (BP/COBP), the number of code modules and average lines of code per module.
Question Concept
BP COBP
#Modules Avg. code #Modules Avg. code
Q1 Enhancement 1 12 7 4.42
Q2 Enhancement — Block
Multiple Events
2 5 8 4.125
Q3 Enhancement — Wait and
Block Multiple Events
3 3.67 8 4.125
Q4 Guard — Block Single
Event
3 4 5 3
Q5 Guard — Block Multiple
Events
5 3.4 7 3.85
Q6 Guard — Override Event 1 8 4 4.5
Q7 Guard — Complex
Override Event
1 10 4 3.25
5.1 Overview
The ISE and SE students study different curricula
and are at different stages in their studies. A Mann-
Whitney analysis revealed statistically significant dif-
ferences in their performance (p-values < 0.05) with
medium to large effect sizes, justifying separate anal-
yses. Combining the data did not change the signif-
icance or effect sizes, confirming that separate anal-
yses highlight meaningful distinctions aligned with
their training and expertise.
The ISE group consisted of 61 third-year students
(37 in COBP, 24 in BP) focused on information sys-
tems analysis and design, while the SE group in-
cluded 48 fourth-year students (29 in COBP, 19 in
BP) specializing in software engineering methods.
Both groups had completed at least four semesters
of programming courses. A pre-questionnaire assess-
ment of their BP background revealed no statistically
significant differences between BP and COBP groups
within either population (see Table 4 and Table 5).
2
2
We present the means of the student’s results in the var-
Given the non-normal distribution of the data, we
employed the Mann-Whitney test to assess statistical
significance and Cohen’s r to calculate effect sizes.
These methods were applied consistently across all
comparisons to ensure robust and meaningful analy-
sis.
5.2 Total Questionnaire Results
In the following tables, total correctness is the sum of
correct answers divided by the total number of ques-
tions. Total average confidence refers to the average
confidence across all questions, where confidence was
measured on a 5-Likert scale. Total time indicates the
time taken to complete all tasks, measured in min-
utes. The rows represent the various metrics. Each
cell presents the average and the standard deviation
in brackets. The underlined numbers indicate the best
results. Bold entries indicate that the metric was sta-
tistically significant. The effect size quantifies the
ious criteria (and not the median of each variable) as these
aggregate several measures.
A Study on the Comprehensibility of Behavioral Programming Variants
261

magnitude of the difference between groups, provid-
ing insight into its practical significance.
Table 6 and Table 7 show the overall measures of
the questionnaire for the ISE and SE students, respec-
tively. The number of participants is indicated next to
each group’s name.
The BP group’s correctness was superior to COBP
in both the ISE and SE populations. The differences
are statistically significant, with medium effect sizes
for both groups, indicating a meaningful advantage
for BP. These findings lead to the rejection of the null
hypothesis H
1
0
for both ISE and SE groups.
The BP group was also more confident in their an-
swers, with a statistically significant advantage for the
ISE group (medium effect size). This supports the re-
jection of the null hypothesis H
1
C0
for ISE students,
while for SE students, the difference was not statisti-
cally significant, and we retained the null hypothesis.
In terms of time, the COBP group answered the
questionnaire faster than the BP group. This differ-
ence was statistically significant for SE students, with
a medium effect size, leading to the rejection of H
1
T 0
for SE. However, no significant time difference was
observed for the ISE group, resulting in the retention
of the corresponding null hypothesis.
These results demonstrate BP’s overall superiority
in correctness and confidence, particularly among ISE
students, while highlighting COBP’s potential advan-
tages in time efficiency for SE students.
5.3 Comprehension and Identification
Results
Table 8 and Table 9 summarize the results for com-
prehension and identification tasks across the ISE and
SE populations.
Comprehension Task. The BP group demonstrated
superior performance in both execution semantics and
alignment sub-tasks, with higher correctness scores
for both ISE and SE students. These differences
were statistically significant for the alignment sub-
task, with small-to-medium effect sizes, leading to the
rejection of H
2.2
0
for both groups. This confirms that
BP supports better comprehension of alignment with
requirements compared to COBP.
Identification Task. In the identification tasks, BP
also outperformed COBP in correctness for both ISE
and SE students. The differences were statistically
significant and demonstrated medium effect sizes,
supporting the rejection of H
3
0
for both groups. Ad-
ditionally, BP participants reported higher confidence
in their answers, with statistically significant differ-
ences and small-to-medium effect sizes. This led to
the rejection of H
3
C0
.
Time to Solution. COBP participants completed
identification tasks faster than BP participants across
both populations. The differences were statistically
significant, with small-to-medium effect sizes for ISE
and SE groups, leading to the rejection of H
3
T 0
for both
groups. However, this time advantage for COBP did
not translate into higher correctness or confidence.
These results confirm BP’s consistent advantage
in comprehension and identification correctness and
confidence, particularly for the alignment task. While
COBP participants completed tasks more quickly, this
may reflect a lack of deeper understanding of the
paradigm, potentially leading to quicker but less ac-
curate responses. This highlights the need for fur-
ther investigation into the relationship between task
complexity, participant familiarity with COBP, and
response time.
5.4 Per Question Results
In the online Appendix (Ashrov et al., 2024c), we
examine specific question results and observe a note-
worthy pattern. For an enhancement question (task1-
Q6) and guard questions involving complex event
overriding (task1-Q5 and task2-Q7), the COBP group
shows an advantage in understandability (though not
statistically significant). The commonality in the
questions where the COBP system proved more un-
derstandable than BP is that BP’s b-threads consist
of two primary components: (1) identifying when
the context is active, and (2) defining the actions to
perform within that context. In contrast, COBP’s
b-threads are inherently context-specific and focus
solely on action specification. These findings suggest
that, in certain cases, COBP may be better suited to
defining complex override rules that are more aligned
with requirements and easier to understand than BP.
6 DISCUSSION
Our results indicate that BP demonstrated an advan-
tage over COBP in understanding a reactive system
enhanced and guarded by the BP variant. Specifically,
BP outperformed COBP in both comprehension and
identification tasks. Participants who worked with BP
provided more correct answers and were more confi-
dent in their responses than those with COBP. These
findings support our hypothesis that there is a dif-
ference between the two variants in terms of system
comprehensibility when extended and guarded using
each respective approach (rejection of hypotheses H
1
0
,
H
2.2
0
, and H
3
0
).
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
262
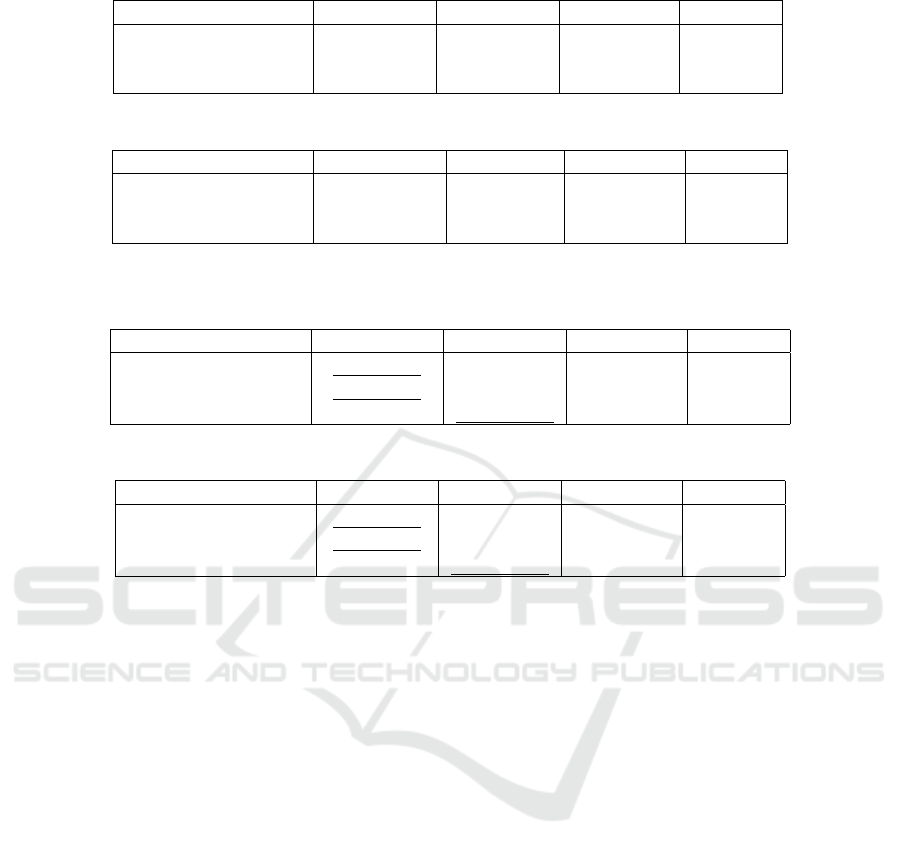
Table 4: Pre-questionnaire results - ISE*.
Question BP (24) COBP (37) Sig. (M-W) Effect (r)
Total correctness 0.85 (0.22) 0.81 (0.20) 0.222 0.156
Total Avg. confidence 4.09 (0.53) 3.96 (0.59) 0.467 0.093
Total time 13.88 (6.02) 10.84 (3.82) 0.088 0.218
Table 5: Pre-questionnaire results - SE*.
Question BP (19) COBP (29) Sig. (M-W) Effect (r)
Total correctness 0.94 (0.07) 0.88 (0.15) 0.292 0.022
Total Avg. confidence 4.41 (0.51) 4.28 (0.58) 0.390 0.018
Total time 15.74 (13.36) 9.07 (3.86) 0.164 0.029
*Correctness is measured on a scale of 0-1. Confidence is on a five-point Likert scale, and time is measured in minutes.
Table 6: The total questionnaire results - ISE*.
DV BP (24) COBP (37) Sig. (M-W) Effect (r)
Total correctness 0.75 (0.14) 0.61 (0.13) 0.000 0.458
Total Avg. confidence 3.65 (0.54) 3.09 (0.61) 0.000 0.460
Total time 45.31 (10.46) 41.05 (9.01) 0.116 0.201
Table 7: The total questionnaire results - SE*.
DV BP (19) COBP (29) Sig. (M-W) Effect (r)
Total correctness 0.83 (0.10) 0.74 (0.12) 0.007 0.386
Total Avg. confidence 3.82 (0.69) 3.66 (0.35) 0.104 0.235
Total time 46.91 (7.99) 39.84 (9.42) 0.014 0.353
*Correctness is measured on a scale of 0-1. Confidence is on a five-point Likert scale, and time is measured in minutes.
We seek to examine the comprehension task in
greater depth. In this task, we measure correctness in
two sub-tasks: execution and alignment. BP partic-
ipants answered more questions correctly in the ex-
ecution task and alignment sub-tasks. Nevertheless,
the COBP group showed an advantage in complex
context-dependent guard b-threads. This could be at-
tributed to Green’s ‘hard mental operations’ (Green
and Petre, 1996). When the enhancement/guard is
simple, the direct approach of BP may require less
mental effort from the developer compared to the
overhead of understanding the context and bound be-
havior of COBP. However, when the enhancement/-
guard is complex, the BP implementation becomes
complicated because it is composed of identifying
the context and specifying the action. This, in turn,
presents a ‘hard mental operation’ for the devel-
oper who needs to comprehend a b-thread that is not
aligned. On the other hand, COBP’s clear separation
of context and behavior allows developers to focus
their mental effort on understanding each component
individually, an approach that pays off when dealing
with complex b-threads.
In the identification task, BP significantly outper-
formed COBP in correctness and confidence. BP’s
advantage can be attributed to two main factors: First,
BP’s visibility is greater, as described by Green’s cog-
nitive dimension (Green and Petre, 1996). The num-
ber of modules/b-threads in BP is small, whereas
COBP had a larger number of code modules and
context-related b-threads that required scrolling to
view. This made the BP implementation more acces-
sible to the developer (see Table 2 and Table 3). In
addition, the larger number of code modules in COBP
likely increased the developer’s cognitive load, which
could have reduced their ability to identify the imple-
mented requirements. Nonetheless, in specific cases
that involve a complex override b-thread, it is possi-
ble that the cognitive load presented by BP b-threads
could have been greater than COBP because the BP
b-threads were not perfectly aligned, leading to an ad-
vantage for COBP.
Another key factor in BP’s advantages could be its
easier learnability compared to COBP, which likely
contributed to its better performance on the experi-
mental tasks. COBP, as a more recent approach, intro-
duces a new context-specific idiom interface that may
present a steeper learning curve, causing participants
to struggle more with their tasks. While COBP par-
ticipants completed tasks faster, particularly in identi-
fication, this may reflect a lack of engagement rather
than genuine efficiency, as they may have “given up”
A Study on the Comprehensibility of Behavioral Programming Variants
263
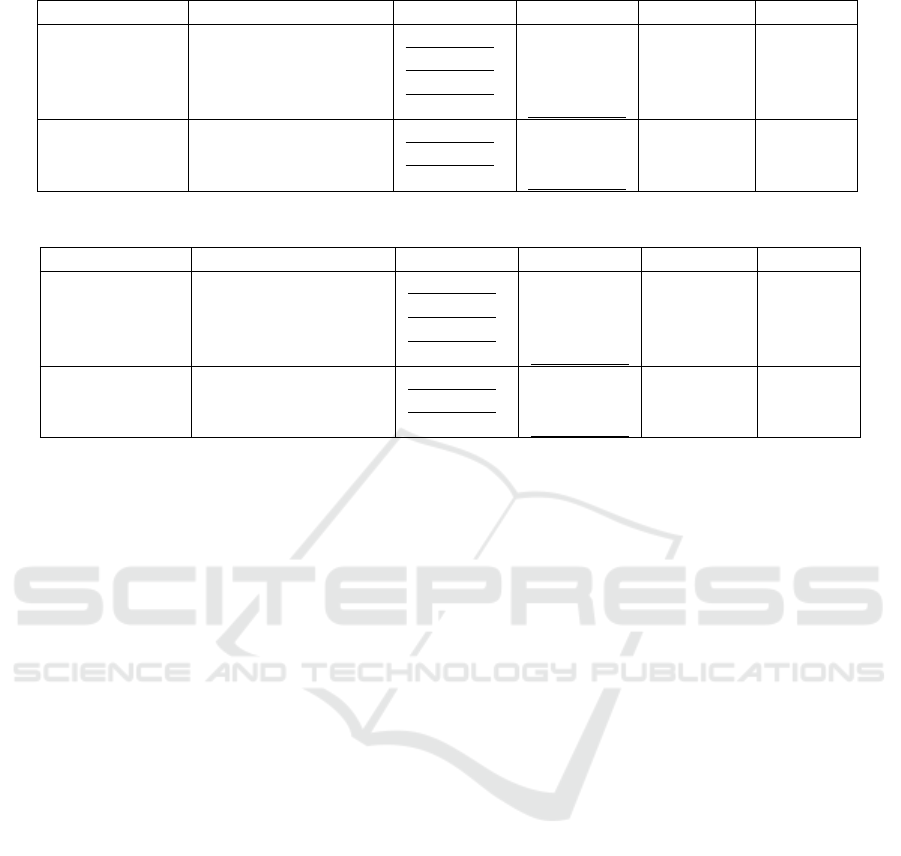
Table 8: Dependent variable results of ISE per task in the questionnaire*.
Concept DV BP (24) COBP (37) Sig. (M-H) Effect (r)
Comprehension
Execution correctness 0.74 (0.20) 0.65 (0.17) 0.068 0.233
Alignment correctness 0.71 (0.20) 0.58 (0.19) 0.012 0.322
Confidence 3.57 (0.61) 2.94 (0.62) 0.000 0.469
Time 28.13 (7.89) 27.26 (7.21) 0.976 0.004
Identification
Correctness 0.81 (0.16) 0.60 (0.19) 0.000 0.493
Confidence 3.74 (0.54) 3.25 (0.72) 0.006 0.349
Time 17.18 (4.91) 13.83 (4.52) 0.009 0.334
Table 9: Dependent variable results of SE per task in the questionnaire*.
Concept DV BP (19) COBP (29) Sig. (M-H) Effect (r)
Comprehension
Execution correctness 0.83 (0.17) 0.81 (0.15) 0.653 0.065
Alignment correctness 0.77 (0.15) 0.68 (0.16) 0.040 0.297
Confidence 3.65 (0.70) 3.58 (0.43) 0.471 0.104
Time 29.60 (6.32) 26.10 (8.44) 0.071 0.260
Identification
Correctness 0.90 (0.10) 0.74 (0.24) 0.025 0.323
Confidence 4.00 (0.74) 3.74 (0.39) 0.018 0.341
Time 17.33 (3.65) 13.72 (3.70) 0.001 0.458
*Correctness is measured on a scale of 0-1. Confidence is on a five-point Likert scale, and time is measured in minutes.
on fully comprehending the paradigm. The rejec-
tion of H
3
T 0
underscores this point, suggesting that
COBP’s faster responses were not accompanied by
higher correctness or confidence. This observation
highlights how COBP’s recent idioms and learning
curve challenges contributed to participants’ difficul-
ties in effectively applying its approach.
While both the SE and ISE groups rejected H
2.2
0
in
favor of BP, the gap between BP and COBP differed.
SE students showed narrower gaps in alignment per-
formance and execution correctness compared to ISE
students. This may stem from differences in educa-
tional focus, with SE students emphasizing the techni-
cal aspects of software engineering, and ISE students
focusing on broader information systems. Addition-
ally, SE students’ fourth-year status and greater expe-
rience may have enhanced their understanding of BP
and COBP principles, contributing to their stronger
performance.
The findings of this study have practical impli-
cations for developing reactive systems. COBP’s
strength in managing context-dependent behaviors
makes it suited for systems requiring dynamic ad-
justments, like smart devices and robotic controllers.
Conversely, BP’s simplicity and modularity are ideal
for applications where maintainability and compre-
hension are paramount, such as safety-critical sys-
tems. This study thus provides actionable guidance
for practitioners in selecting between BP and COBP,
which can be applied in several practical scenar-
ios: (i) When developing safety-critical systems with
straightforward guard rules but high comprehensibil-
ity requirements, BP’s simpler model may help re-
duce potential maintenance errors and make code re-
views more efficient. (ii) For reactive systems with
complex contextual requirements, COBP’s explicit
context modeling can help manage this complexity
more effectively. (iii) In systems that start simple but
are expected to grow in complexity over time, teams
might begin with BP for its easier learning curve, then
gradually transition to COBP as context-dependent
behaviors become more prevalent.
7 THREATS TO VALIDITY
In this section, we discuss the potential threats to the
validity of our study and how we addressed them. We
consider four main categories of validity threats: con-
struct validity, internal validity, conclusion validity,
and external validity (Wohlin et al., 2012).
Construct Validity. Measuring correctness, confi-
dence, and time is a common practice for measur-
ing comprehension in software engineering (Ashrov
et al., 2017; Rajlich and Cowan, 1997). Two main
threats to construct validity were identified: (i) po-
tentially measuring understanding of BP/COBP syn-
tax rather than comprehension of enhanced systems,
and (ii) whether our experimental instruments validly
measure the intended constructs. We addressed these
threats by designing domain-specific questions, con-
ducting a pilot study with students having no prior
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
264

BP/COBP exposure, and consulting with COBP ex-
perts during questionnaire design. The pilot study
was particularly valuable in validating that our instru-
ments measured system comprehension and helping
refine questions to better target understanding of the
enhanced system rather than just paradigm mechan-
ics.
Internal Validity. The students had some familiar-
ity with BP because they had attended a lecture on BP
in their course and solved a home assignment with
Provengo that was based on BP. We mitigated this
risk by explaining BP to both groups at the beginning
of the experiment to ensure a shared baseline under-
standing. In addition, self-selection into groups based
on session timing could introduce a bias, as students
choosing the same time slot might share characteris-
tics (e.g., time constraints or social connections). We
mitigated the knowledge level and potential selection
bias by verifying that there were no significant dif-
ferences in BP background between groups (See ta-
bles 4 and 5). Regarding the commitment of the sub-
jects, the compensation of bonus points based on the
students’ performance increased their motivation and
commitment. While offering bonus points is a com-
mon practice to motivate participation, it could lead to
varying levels of motivation among students. We mit-
igated this threat by: (i) keeping the bonus points to
a modest percentage of the total course grade (max-
imum 5%), (ii) making it clear to students that the
bonus was supplementary and not essential for pass-
ing the course, and (iii) structuring the bonus to be
proportional to effort and engagement. Finally, the
training session for COBP was longer, which might
have caused a fatigue effect that also impacted the per-
formance of the COBP group.
Another internal validity threat concerns the self-
reported nature of confidence scores. Individual
personality differences and gender-based variations
in self-assessment tendencies could have influenced
these scores. While this study anonymized responses
to reduce potential biases, future research should con-
sider collecting demographic information and pair-
ing self-reports with objective performance metrics to
better understand and control these effects.
Finally, While we analyzed ISE and SE students
separately due to their distinct backgrounds and per-
formance differences, an alternative approach would
have been to treat program enrollment as an inde-
pendent variable (covariate). Given our experimental
setup and the significant differences between popula-
tions, separate analyses provided clearer insights into
how each group engaged with the BP variants. Future
research could explore using the program as a covari-
ate with a larger, more balanced sample size.
Conclusion Validity. While Likert scales are ordi-
nal, we used mean values for composite confidence
scores across multiple questions, a practice validated
for group comparisons (Carifio and Perla, 2007; Nor-
man, 2010). Moreover, We followed the assumptions
of the statistical tests (normal distribution and data in-
dependence) and the effect size when we analyzed the
results. Finally, the answers to the questions were de-
fined before the experiment and were reviewed by ex-
perts.
External Validity. One external validity issue is
subject selection. The subjects were undergradu-
ate students from two different populations with di-
verse experience in software engineering and mod-
eling. Kitchnham et al. (Kitchenham et al., 2002)
argue that this is acceptable if the research ques-
tions are not focused on experts. This is the case in
our experiment since we were looking for subjects
with little or no experience in the paradigms. An-
other external validity threat concerns the generaliz-
ability of our findings, as the study relied on a sin-
gle case, the Taxi environment, to evaluate compre-
hension. This domain was chosen for its balance be-
tween simplicity and complexity, making it suitable
for an educational context. However, using a single,
relatively straightforward domain limits the applica-
bility of our results to broader, more complex real-
world scenarios. An additional external validity threat
is that our study focused specifically on enhancements
and guard clauses, while other common maintenance
types such as bug fixes and refactoring were not in-
vestigated. We acknowledge these threats and state
that generalizing the results should be done carefully,
and further studies may be required.
8 SUMMARY
In this paper, we conducted a controlled experiment
with 109 participants to compare the comprehension
of a reactive system enhanced and guarded using BP
versus COBP. The results of this experiment show
a general advantage for BP in understanding system
behavior, identifying gaps between system behavior
and requirements, and comprehending requirements
from existing specifications. BP’s simplicity makes
it preferable for systems requiring clear guard/over-
ride rules, or for educational tools where ease of
comprehension is paramount. In contrast, COBP
showed a slight advantage in complex b-threads in-
volving simultaneous context definition and intricate
A Study on the Comprehensibility of Behavioral Programming Variants
265

override actions, such as smart devices adapting to
changing conditions or robotic controllers navigating
through dynamic environments. These findings pro-
vide actionable guidance for selecting the appropriate
paradigm based on system complexity and the nature
of guard rules. Specifically, our results suggest:
• Use BP when the system requires high maintain-
ability and clear code comprehension.
• Consider COBP for systems with complex con-
textual requirements, especially when behaviors
need to adapt dynamically to changing conditions.
• Factor in team expertise and system evolution —
BP’s simpler learning curve may benefit rapid de-
velopment, while COBP’s context-awareness bet-
ter supports long-term scalability.
ACKNOWLEDGMENTS
We thank the anonymous reviewers for their insight-
ful comments. This work was partially funded by the
European Union (ERC, VeriDeL, 101112713). Views
and opinions expressed are however those of the au-
thor(s) only and do not necessarily reflect those of
the European Union or the European Research Coun-
cil Executive Agency. Neither the European Union
nor the granting authority can be held responsible for
them. Additionally, this work was partially supported
by the Israeli Smart Transportation Research Center
(ISTRC).
REFERENCES
Ashrov, A., Gordon, M., Marron, A., Sturm, A., and Weiss,
G. (2017). Structured Behavioral Programming Id-
ioms. In Proc. 18th Int. Conf. on Enterprise, Business-
Process and Information Systems Modeling: (BP-
MDS), pages 319–333.
Ashrov, A. and Katz, G. (2023). Enhancing Deep Learning
with Scenario-Based Override Rules: a Case Study.
In Proc. 11th Int. Conf. on Model-Driven Engineering
and Software Development (MODELSWARD), pages
253–268.
Ashrov, A., Marron, A., Weiss, G., and Wiener, G. (2015).
A Use-Case for Behavioral Programming: An Archi-
tecture in JavaScript and Blockly for Interactive Ap-
plications with Cross-Cutting Scenarios. Science of
Computer Programming, 98:268–292.
Ashrov, A., Sturm, A., Elyasaf, A., and Katz, G. (2024a).
A Study on the Comprehensibility of Behavioral Pro-
gramming Variants — BP Questionnaire. https://
forms.gle/nLtGkPGdNM4USJtG8.
Ashrov, A., Sturm, A., Elyasaf, A., and Katz, G. (2024b).
A Study on the Comprehensibility of Behavioral Pro-
gramming Variants — COBP Questionnaire. https:
//forms.gle/4fQ7N3bTvDd6XuNQ6.
Ashrov, A., Sturm, A., Elyasaf, A., and Katz, G. (2024c).
Supplementary Materials: A Study on the Com-
prehensibility of Behavioral Programming Variants.
https://doi.org/10.5281/zenodo.14845899.
Bar-Sinai, M., Elyasaf, A., Weiss, G., and Weiss, Y. (2023).
Provengo: A Tool Suite for Scenario Driven Model-
Based Testing. In Proc. 38th IEEE/ACM Int. Conf. on
Automated Software Engineering (ASE), pages 2062–
2065.
Bar-Sinai, M., Weiss, G., and Shmuel, R. (2018). BPjs—
a Framework for Modeling Reactive Systems using a
Scripting Language and BP. Technical Report. http:
//arxiv.org/abs/1806.00842.
Brooks, R. (1983). Towards a Theory of the Comprehension
of Computer Programs. Int. Journal of Man-Machine
Studies, 18(6):543–554.
Carifio, J. and Perla, R. J. (2007). Ten Common Misunder-
standings, Misconceptions, Persistent Myths and Ur-
ban Legends about Likert Scales and Likert Response
Formats and their Antidotes. Journal of Social Sci-
ences, 3(3):106–116.
Corsi, D., Yerushalmi, R., Amir, G., Farinelli, A., Harel,
D., and Katz, G. (2024). Constrained Reinforcement
Learning for Robotics via Scenario-Based Program-
ming. In Proc. 31st Int. Conf. on Neural Information
Processing (ICONIP).
Curasma, H. P. and Estrella, J. C. (2023). Reactive Soft-
ware Architectures in IoT: A Literature Review. In
Proc. Int. Conf. on Research in Adaptive and Conver-
gent Systems (RACS), pages 1–8.
Dafflon, B., Vilca, J., Gechter, F., and Adouane, L.
(2015). Adaptive Autonomous Navigation using Re-
active Multi-agent System for Control Law Merging.
In Proc. Int. Conf On Computational Science (ICCS),
pages 423–432.
Desai, A., Ghosh, S., Seshia, S. A., Shankar, N., and Tiwari,
A. (2018). Soter: Programming Safe Robotics System
using Runtime Assurance. Technical Report. http://
arxiv.org/abs/1808.07921.
Dietterich, G. (2000). Hierarchical Reinforcement Learn-
ing with the MAXQ Value Function Decomposition.
Journal of Artificial Intelligence Research, 13:227–
303.
Elyasaf, A. (2021a). COBPjs: Context-oriented behav-
ioral programming in JavaScript. https://github.com/
bThink-BGU/COBPjs.
Elyasaf, A. (2021b). Context-Oriented Behavioral Pro-
gramming. Information and Software Technology,
133.
Elyasaf, A., Marron, A., Sturm, A., and Weiss, G. (2018). A
Context-Based Behavioral Language for IoT. In Proc.
21st ACM/IEEE Int. Conf. on Model Driven Engineer-
ing Languages and Systems (MODELS) Workshops,
pages 485–494.
Elyasaf, A., Sadon, A., Weiss, G., and Yaacov, T. (2019).
Using Behavioural Programming with Solver, Con-
text, and Deep Reinforcement Learning for Playing
a Simplified Robocup-Type Game. In Proc. 22nd
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
266

ACM/IEEE Int. Conf. on Model Driven Engineering
Languages and Systems Companion (MODELS-C),
pages 243–251.
Gordon, M., Marron, A., and Meerbaum-Salant, O. (2012).
Spaghetti for the Main Course? Observations on
the Naturalness of Scenario-Based Programming. In
Proc. 17th Conf. on Innovation and Technology in
Computer Science Education (ITICSE), pages 198–
203.
Green, T. (1989). Cognitive Dimensions of Notations. Peo-
ple and Computers V, pages 443–460.
Green, T. and Petre, M. (1996). Usability Analysis of Vi-
sual Programming Environments: a ‘Cognitive Di-
mensions’ Framework. Journal of Visual Languages
& Computing, 7(2):131–174.
Greenyer, J., Gritzner, D., Katz, G., and Marron, A. (2016).
Scenario-Based Modeling and Synthesis for Reactive
Systems with Dynamic System Structure in Scenari-
oTools. In Proc. 19th ACM/IEEE Int. Conf. on Model
Driven Engineering Languages and Systems (MOD-
ELS), pages 16–23.
Gritzner, D. and Greenyer, J. (2018). Synthesizing Exe-
cutable PLC Code for Robots from Scenario-Based
GR (1) Specifications. In Proc. Workshops on Soft-
ware Technologies: Applications and Foundations
(STAF), pages 247–262.
Harel, D., Kantor, A., and Katz, G. (2013). Relaxing Syn-
chronization Constraints in Behavioral Programs. In
Proc. 19th Int. Conf. on Logic for Programming, Arti-
ficial Intelligence and Reasoning (LPAR), pages 355–
372.
Harel, D., Kantor, A., Katz, G., Marron, A., Weiss, G., and
Wiener, G. (2015). Towards Behavioral Programming
in Distributed Architectures. Journal of Science of
Computer Programming (J. SCP), 98:233–267.
Harel, D. and Katz, G. (2014). Scaling-Up Behavioral Pro-
gramming: Steps from Basic Principles to Applica-
tion Architectures. In Proc. 4th SPLASH Workshop
on Programming based on Actors, Agents and Decen-
tralized Control (AGERE!), pages 95–108.
Harel, D., Katz, G., Marelly, R., and Marron, A. (2016).
An Initial Wise Development Environment for Behav-
ioral Models. In Proc. 4th Int. Conf. on Model-Driven
Engineering and Software Development (MODEL-
SWARD), pages 600–612.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2012a).
Non-Intrusive Repair of Reactive Programs. In Proc.
17th IEEE Int. Conf. on Engineering of Complex Com-
puter Systems (ICECCS), pages 3–12.
Harel, D., Katz, G., Marron, A., and Weiss, G. (2014). Non-
Intrusive Repair of Safety and Liveness Violations in
Reactive Programs. Transactions on Computational
Collective Intelligence (TCCI), 16:1–33.
Harel, D., Lampert, R., Marron, A., and Weiss, G. (2011).
Model-Checking Behavioral Programs. In Proc. 9th
ACM Int. Conf. on Embedded Software, pages 279–
288.
Harel, D., Marron, A., and Weiss, G. (2010). Programming
Coordinated Behavior in Java. In Proc. European
Conf. on Object-Oriented Programming (ECOOP),
pages 250–274.
Harel, D., Marron, A., and Weiss, G. (2012b). Behav-
ioral Programming. Communications of the ACM,
55(7):90–100.
Kaelbling, L. (1987). An Architecture for Intelligent Re-
active Systems. Reasoning about Actions and Plans,
pages 395–410.
Katz, G. (2021). Augmenting Deep Neural Networks
with Scenario-Based Guard Rules. Communica-
tions in Computer and Information Science (CCIS),
1361:147–172.
Katz, G., Barrett, C., and Harel, D. (2015). Theory-Aided
Model Checking of Concurrent Transition Systems. In
Proc. 15th Int. Conf. on Formal Methods in Computer-
Aided Design (FMCAD), pages 81–88.
Kitchenham, B., Pfleeger, S., Pickard, L., Jones, P.,
Hoaglin, D., El Emam, K., and Rosenberg, J. (2002).
Preliminary Guidelines for Empirical Research in
Software Engineering. IEEE Transactions on Soft-
ware Engineering, 28(8):721–734.
Morandini, M., Marchetto, A., and Perini, A. (2011). Re-
quirements Comprehension: a Controlled Experiment
on Conceptual Modeling Methods. In Proc. Workshop
on Empirical Requirements Engineering (EmpiRE),
pages 53–60.
Norman, G. (2010). Likert Scales, Levels of Measurement
and the “laws” of Statistics. Advances in Health Sci-
ences Education, 15:625–632.
Phan, D., Yang, J., Grosu, R., Smolka, S., and Stoller, S.
(2017). Collision Avoidance for Mobile Robots with
Limited Sensing and Limited Information about Mov-
ing Obstacles. Formal Methods in System Design
(FMSD), 51(1):62–86.
Provengo (2024). Provengo Online Course. https://
provengo.github.io/Course.
Rajlich, V. and Cowan, G. (1997). Towards Standard for
Experiments in Program Comprehension. In Proc. 5th
Int. Workshop on Program Comprehension (IWPC),
pages 160–161.
Schierman, J., DeVore, M., Richards, N., Gandhi, N.,
Cooper, J., Horneman, K., Stoller, S., and Smolka,
S. (2015). Runtime Assurance Framework Devel-
opment for Highly Adaptive Flight Control Systems.
Technical Report. https://apps.dtic.mil/docs/citations/
AD1010277.
Storey, M.-A. (2005). Theories, Methods and Tools in Pro-
gram Comprehension: Past, Present and Future. In
Proc. 13th Int. Workshop on Program Comprehension
(IWPC), pages 181–191.
Sutton, R. and Barto, A. (1999). Reinforcement Learning.
Journal of Cognitive Neuroscience, 11(1):126–134.
Sweller, J. (1988). Cognitive Load During Problem
Solving: Effects on Learning. Cognitive Science,
12(2):257–285.
Taxi (2024). The Taxi Environment. https://gymnasium.
farama.org/environments/toy_text/taxi/.
Wohlin, C., Runeson, P., Höst, M., Ohlsson, M., Regnell,
B., and Wesslén, A. (2012). Experimentation in Soft-
ware Engineering, volume 236. Springer.
A Study on the Comprehensibility of Behavioral Programming Variants
267
