
Low-Cost GNSS Receivers Reliability Using Centipede RTK Network
for Land Surveying
Muhammad Ali Sammuneh
a
, Mojtaba Eslahi
b
, Rani EL Meouche
c
and Elham Farazdaghi
d
Institut de Recherche en Construction (IRC), ESTP Paris, 94230 Cachan, France
Keywords: GNSS, Land Surveying, RTK, Centipede-RTK, Low-Cost GNSS.
Abstract: The question of using low-cost Multiband Global Navigation Satellite System GNSS receivers and antennas
in land surveying is real and important. In France, mainly a collaborative Real Time Kinematic (RTK)
network called Centipede covers the country providing the corrections open access in real time to the users.
Furthermore, the low-cost interface application and software called SW Maps connect the Low-cost GNSS
receiver to the Centipede-RTK network using a smartphone. The cost of surveying projects using all these
elements is certainly economical. The main question here is the reliability of this package to perform
continuous, stable, and reliable RTK land surveying. We test this capability by examining the differences in
the RTK position of known control points with a series of measurements over different mount points. The
results show that we can use this package for land surveying only with necessary validation and control by
experimental users, as the indicators of Centipede RTK accuracy via the SW Maps interface are not
representative.
1 INTRODUCTION
Low GNSS cost concept is attractive economically
and it can offer an alternative to accomplish some
kinds of engineering projects. Nevertheless, the main
question is to examine the reliability of this package
(Low-cost dual frequency receiver, low-cost antenna,
open access Centipede-RTK network in France and
free Android GIS application SW Maps on
smartphone) to achieve land surveying in RTK in a
continues, stable and reliable way. We explore this
possibility by examining the differences in RTK
position of known control points with a series of
measurements over different mount points.
We start with the necessary definitions of technical
terms and their abbreviations to ensure a good
understanding of this work. A GNSS, or Global
Navigation Satellite System, is a generic name for a
group of artificial satellites consisting mainly of
constellations from the United States (GPS), Russia
(GLONASS), Europe (Galileo), and the China
(Beidou) that transmit position and timing data from
their high orbits (Teunissen and Montenbruck, 2017).
a
https://orcid.org/0009-0008-4977-7386
b
https://orcid.org/0000-0001-5005-1867
c https://orcid.org/0000-0001-5063-6638
d https://orcid.org/0000-0001-9935-1553
NTRIP (Network and Transport of RTCM via Internet
Protocol) is a protocol for transmitting Real Time
Kinematic (RTK) corrections over the Internet to
Global Navigation Satellite System (GNSS) receivers.
RTK, on the other hand is a technique for improving
the accuracy of GNSS positioning using information
from (GNSS-RTK base or a mount point) a fixed
reference station whose position is well known (GNSS
Science Support Centre fosters collaboration across
scientific communities through the provision of GNSS
science-based products and services., 2021). Typical
nominal accuracy for RTK systems is 1 cm
horizontally and 2 cm vertically (Seeber, 2003).
Centipede RTK is a network of shared, open-
access GNSS RTK bases. The Centipede project aims
to create a network of open RTK bases available to
anyone in the coverage area. Public institutions,
individuals, and private stakeholders (farmers or
other public partners) extend the network. The
objective of the project is to provide complete
coverage of the metropolitan area. The French public
research institute working for the coherent and
sustainable development of agriculture, food and the
Sammuneh, M. A., Eslahi, M., El Meouche, R. and Farazdaghi, E.
Low-Cost GNSS Receivers Reliability Using Centipede RTK Network for Land Surveying.
DOI: 10.5220/0013444800003935
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2025), pages 211-218
ISBN: 978-989-758-741-2; ISSN: 2184-500X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
211

environment (INRAE) (“INRAE: research for
Agriculture, Food and Environment,” n.d.),
financially supports the project and since its launch in
2019, it has benefited from shared resources between
research institutes, public bodies, farmers, and private
companies (“Le Reseau Centipede RTK,” n.d.). SW
Maps is a free Android GIS and mobile mapping
application for collecting, presenting, and sharing
geographic information (“SW Maps - GIS & Data
Collector – Applications - Google Play,” n.d.). It
allows users to perform high-precision GPS surveys
using external RTK-compatible Bluetooth or USB
serial receivers. It can be used with low-cost GNSS
receivers and requires a USB-C male to USB-A male
cable to work with an Android phone.
The current research presents studies on low-cost
receivers and antennas that address their accuracy or
stability. In addition, publications related to the
Centipede collaborative network discuss the accuracy
of this network using high-quality geodetic GNSS
receivers and antennas. Nowadays several researches
have been done on low-cost GNSS. In fact, we
recently have access to low-cost GNSS receivers and
low-cost antennas (LCRA). In addition, free
smartphone applications serve as an interface to
connect LCRA to the Centipede mount point
(Sammuneh et al., 2023). We found it interesting to
explore the possibility of securing land surveying in
an economical and trustworthy manner. Our work
differs from others in that we gather all the low-cost
concepts and tools (receivers, antennas, correction
network, interface, and software); and tried to answer
this simple question: Could we trust the RTK results
of LCRA within the Centipede network for reliable
land surveying ?
There is an increasing number of studies on the
accuracy of low-cost GNSS receivers and dual-
frequency receivers (Jackson et al., 2018). A recent
review, found that “Low-cost GNSS receivers
generally exhibit lower observation quality compared
to geodetic GNSS receivers in both open sky and
urban conditions” and “Sub-centimeter accuracy can
be achieved in the static relative method while a few
centimeter accuracy is possible in RTK when open
sky conditions are guaranteed (Stopar et al., 2024).
However, for longer baselines and areas with
obstructed views of the sky, low-cost GNSS receivers
still can’t achieve the same positioning quality as
geodetic GNSS receivers”. Studies on the
performance of low-cost dual-frequency GNSS
receivers and antennas for surveying in urban areas
are the main subject of recent research (Hamza et al.,
2023, 2021b, 2021a, 2020). There are many studies
on the accuracy of RTK using LCRA in different
scenarios, including open-sky environments.
(Bellone et al., 2016; Broekman and Gräbe, 2021;
Cina and Piras, 2015). Semler et al. (2019) showed
that 1 cm spatial accuracy is possible in open sky
conditions using LCRA (Semler et al., 2019). Other
researches discuss the limits of baseline distances,
giving a limit of up to 20 km for short baselines, since
beyond this distance the quality of positioning
deteriorates due to ionospheric distortion (Caldera et
al., 2016; Tsakiri et al., 2017). Moreover, when
testing the kinematic performance of RTK in a non-
urban area with a long baseline of about 30 km, the
RTK solutions showed good concordance with the
post-processed data, with less than 5% of the
differences exceeding 3 cm in the planimetric
component and 10 cm in the vertical component
(Sanna et al., 2022).
However, Centipede is a network of mount points,
each of which sends its own RTK corrections to the
user but it is not NRTK. The Centipede website states
that “This technology can be used, for example, to
carry out naturalistic surveys (flora, fauna) with a
high degree of localization accuracy, to carry out
aerial photographic surveys (using drones) and to
automate the driving of agricultural vehicles” (“Le
Reseau Centipede RTK,” n.d.).
Thus, now the Centipede RTK databases are
archived in RINEX (Receiver Independent Exchange
Format) in the RENAG databases, which is a serious
guarantee of durability for the network's data.
Conversely, the Centipede databases are used for
RENAG's daily analyses (“Le Reseau Centipede
RTK,” n.d.).
2 MATERIALS AND METHODS
In our project, we use the Leica GNSS receivers &
antenna, u-blox dual-frequency GNSS chip ZED-F9P
Survey GNSS low-cost receiver (“ZED-F9P
module,” 2023) and Calibrated Survey GNSS
Multiband antenna (IP67) (“Calibrated Survey GNSS
Tripleband + L-band antenna (IP67),” n.d.), SW maps
android application, and smartphone. We use the
GNSS calculations online service network of the IGN
website to manage the Rinex files and to calculate
control points coordinate (“Calculs GNSS Réseau en
ligne | RGP,” n.d.). The centipede website is used to
show the actual situation of the mount points.
In our case, we used two main modes:
Static mode: Relative positioning to the phase in
deferred time. The precision is of the order of
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
212

centimetres or even millimetres for high-quality
receivers (Teunissen and Montenbruck, 2017).
RTK mode: Relative phase positioning in real-time.
The precision is of the order of 5 cm. The data is sent
via internet (Teunissen and Montenbruck, 2017).
The method of this study aims to have serial
estimations of the coordinates of well-known Control
points in RTK based on different mounting points
going from the nearest one to 60 km distance. We
start by using static mode with 3 hours of GNSS
observation using a high quality receiver and antenna
to generate a RINEX observation file with 30-sec
frequencies. We then wait for 2 weeks to obtain the
precise orbit file to calculate the final coordinates of
the reference point REF1 (“Calculs GNSS Réseau en
ligne | RGP,” n.d.). Once the REF1 coordinates are
fixed, we start using a Low-cost GNSS receiver and
antenna to connect to the Centipede network via
smartphone using the SW maps application. We start
by creating a GIS project in SW Maps and allow only
RTK fix quality features to be stored.
We examine the possibility of connecting the
Centipede mount points and getting RTK fix quality
from them by recording 3-4 minutes of RTK
observations, with 5 seconds frequency for each
mount point, within 60 km distance from our
reference point. Then we collect the data related to
each functional mount point within 30 minutes and 5
seconds frequency .After analysis, we focus on three
mount points for the next data collection for one day
with ten series of 30 minutes and 5 seconds frequency
for each one of the three mount points to investigate
their continuity, stability, and reliability. We examine
three levels of planimetric accuracy, less than 5 cm,
from 5 to 10 cm, and over 10 cm.
3 LOW-COST RELIABLE GNSS
RECEIVERS DUE TO THE
CENTIPEDE RTK NETWORK
3.1 Reference Point
We choose a reference point with an open sky view
to make our measurements using (the signal) GNSS
constellations without multipath effects. We call this
point “REF1”. We collect the observations using a
LEICA GS10 dual frequency receiver and LEIAS10
Leica antenna (“Leica Viva GS10 et GS25 –
Récepteurs GNSS de haute précision,” n.d.). The
measurements are made in static mode with 30
seconds frequency for 3 hours to generate the RINEX
file of REF1. We use the IGN online site calculation
service to obtain the final position coordinates
(“Calculs GNSS Réseau en ligne | RGP,” n.d.). The
calculations use Bernese GNSS software. It calculates
vectors from 12 permanent GNSS stations (RGP) and
REF1, using the precise orbits to determine the final
coordinates of REF1. The estimated accuracy given
by the calculation report is (North: 9 mm, East: 10
mm, Height: 23 mm), with final coordinates in UTM
31 N (E = 450714.314 m, N = 5404846.437 m).
3.2 Centipede Mount Points
In this section, we will mainly use the U-blox dual-
frequency GNSS chip ZED-F9P Survey GNSS low-
cost receiver & Calibrated Survey GNSS Multiband
antenna connected to a smartphone by SW Map
Android GIS application. In this part, we will discuss
the possibility of contacting the mounting points of
Centipede via the application within 60 km distance
from the reference station REF1 to verify the
connectivity and to ensure a fixed ambiguity solution
(RTK Fixed). Then we will examine the stability of the
observations for each mount point by observing the
differences in behaviour over time (changes). Finally,
we will concentrate on three stable mount points to test
the accuracy for ten sets of measurements covering 6
hours of RTK observation to ensure the reliability of
the mount station’s diffused corrections.
3.2.1 Connectivity
The Centipede network covers the French territories
but there are some gaps. For the practical use of this
network and as we aim to propose a strategy, we will
examine the connectivity and the differences in the
plan components for near and far points within the
limit of 60 km. The connection is made through the
NTRIP settings in SW-Maps, and then we can
indicate the type of solution (DGPS or RTK Fix),
PDOP, HDOP, VDOP, satellite in view, satellite in
use, the horizontal and vertical accuracy. However,
the accuracy is given in meters. This does not help to
ensure the user the accuracy needed for his work in
land surveying. We are looking for an indicator that
shows the level of accuracy in cm. However, we will
verify in section 3.2.4, whether this indicator change
has any impact on the results.
As mentioned in Table 1, we have mainly 14
mount points and we found that 12 mount points can
be contacted giving RTK Fix solution except the
GRIG mount point which gave DGPS RTK solution
and is discarded from the test set. Table 1. 14
Centipede-RTK network mount points within 60 km
of the reference point.
Low-Cost GNSS Receivers Reliability Using Centipede RTK Network for Land Surveying
213

Table 1: 14 Centipede-RTK network mount points within
60 km of the reference point.
3.2.2 Planimetric Differences
In this work, we will focus only on horizontal or
planimetric results. To estimate the accuracy of the
measurements, we assume that the coordinates of
reference REF1 are accurate and precise. Therefore,
the 2D horizontal or planimetric differences are
considered as the accuracy levels to be discussed. It
is given by difference of the components east and
north of the observed coordinates
from the reference point :
(1)
(2)
(3)
We keep the term difference when talking about
accuracy because it is more representative in our case
with only one reference point. As Figure 1 shows, the
2D planimetric differences give an idea of the
connectivity of the mount points, but also alert the
results concerning the OUIL station for example. We
expect the distant mount points to give high differences
like COND-50KM which gives for some observations
a 2D difference level of 20 cm. The OUIL station is 19
km away from our reference point and it shows a
steady level of 15 cm 2D planimetric differences that
exceed all the other mount points within 60 KM of
distance. Mount points show except (OUIL and
COND) in Figure 1, 2D planimetric differences
reaching a maximum level of 7 cm for the RTK fix
solution.
We see that for some mount points the behaviour
is not stable giving a 5 cm level of difference and
suddenly jumping to a 20 cm level COND-50 KM
while. BARB-48 KM gives differences less than 5 cm
level, but it changes for every 5 sec observation.
Therefore, we need to verify the stability of the 2D
planimetric differences with time for these eleven
mount points over a longer observation period. It is
quite interesting that the mount stations @50km and
@60km show differences of about 5 to 7 cm.
Nevertheless, our sets of measurements in this section
are intended to verify the connectivity.
Figure 1: The difference in 2D Planimetric coordinates of
11 mount points of Centipede Network within one minute
per station with 5 seconds frequency.
3.2.3 Stability
We collect observations for each mount point within
five minutes with a five-second frequency. This
choice is made to collect data within the period that
the satellite configuration is likely to gives the same
positioning dilution of the precision PDOP for each
data set, and to preserve the same metrology
conditions for the troposphere and ionosphere. Figure
2 shows the difference in 2D planimetric coordinates
of 11 mount points of Centipede Network within five
minutes per station with 5 seconds frequency.
Figure 2: Difference in 2D Planimetric coordinates of 11
mount points of Centipede Network within five minutes per
station with 5 seconds frequency.
The poor accuracy of the OUIL mount point is
again shown and it means that the corrections sent by
this point are not good enough to be used for 2D
topographic surveying with a 5 cm accuracy level.
This confirms our suspicion about Centipede mount
points and the need to verify their reliability before
any surveying. Still talking about OUIL, the changes
go from 20 to 16 cm which means that the rate of
change is 4 cm within five minutes. Another
interesting result comes from a distance of 20 km
between two mount points on the same building,
a)
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
214
ENSG (Ecole national des sciences geographies),
called ENSG and ENSG2. The first provides a level
of 4 cm difference while ENSG2 indicates 10 cm.
Therefore, one should use the first mount point
rather than the second if they have the same distance
from our reference point. The indicators in the SW-
Maps interface are the same for both mount points.
Beyond 20 km distance, the differences are quite
above 5 cm level. HBC77@40km distance shows
some exceptions to be below 5 cm level for some
times. Remembering the results in (Sanna et al., 2022)
about the performance of RTK in a non-urban area
with a long baseline of about 30 km, the RTK
solutions have shown a good concordance with post-
processed data, with less than 5% of differences
surpassing 3 cm in the planimetric component.
Meanwhile, the BARB@48km mount point has a 6-
10 cm level. COND@50km has quite troubling
behaviour by giving less than a 5 cm level for the first
two minutes and then suddenly it reaches a 15 cm
level of difference. The difference then decreases
slightly over time, but remains above the 5 cm level.
Therefore, the stability of this mount point again
shows its chaotic behaviour. SEG@51km has more
than a 15 cm difference level and sometimes some
pics reach 50 cm. GPTR@60km has a stable 20 cm
level of difference with one pic reaching 40 cm. In
(Caldera et al., 2016; Tsakiri et al., 2017) a limit of 20
km for short baselines is given because more than this
distance, the quality of positioning deteriorates due to
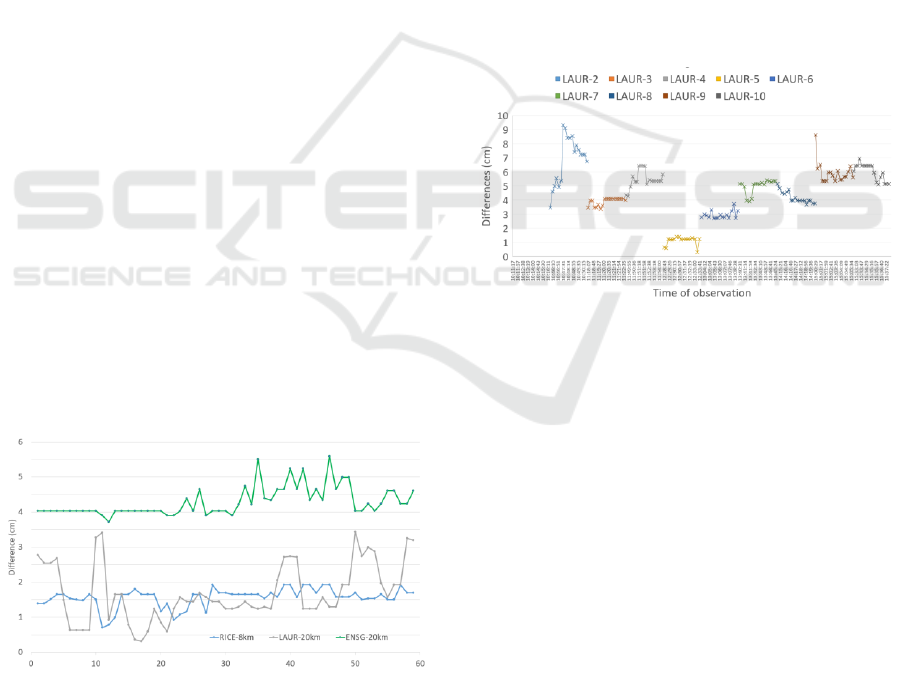
the ionospheric bias. We focus on three mount points
stations RICE@8km, LAUR@20km, and ENSG@20
km. As Figure 3 illustrates ENSG@20km has a
mainly 5 cm level of difference within five minutes.
RICE@8km is better than the 2 cm level, however,
LAUR@20km is still below than the 3.5 cm level but
with fluctuating behaviour.
Figure 3: Difference in 2D Planimetric coordinates of three
mount points of Centipede Network within five minutes per
station with 5 seconds frequency.
3.2.4 Reliability
We need to extend the research for one day to study
the behaviour of these three “short baselines” over
time. We have ten sets of observations for each mount
point. The observations are 5 minutes for RICE and
then 5 minutes for LAURE and finally 5 minutes for
ENSG within a 20 minute time span. We wait 20-30
minutes to restart the observations of the next set. We
will consider nine sets to show the behaviour of the
LAUR@20km mount point. Figure 4 shows sub-ten-
centimeter level differences of all LAUR mount point
sets. We can distinguish four sets with differences
below the 5 cm level (3, 5, 6, and 8). The RTK
measurements are for 5 minutes with 5 seconds
frequency, which means that for these four sets the
surveying work reaches the required level of 5 cm
maximum of accuracy. Nevertheless, the other sets
except set 2 go beyond the five centimeters level but
below the seven centimeters level. Set 2 shows
instability and the difference level reaches 10 cm.
Figure 4: 2D planimetric differences of nine sets of
observations based on LAUR mount point.
The LAUR mount point shows good results
(<5cm) and bad results; therefore one can use it to
periodically verify his measurements by comparing
them with known points around his work. These
conclusions of results are with 20 km distance from
LAUR mount point. It is worth future research work
to verify for <10 km distance whether the differences
for all sets go lower than the five cm level of
difference. LAUR mount point could be used for
topographic or surveying works within a 20 km
distance, with strict periodic verifications and
controls on the site.
Low-Cost GNSS Receivers Reliability Using Centipede RTK Network for Land Surveying
215
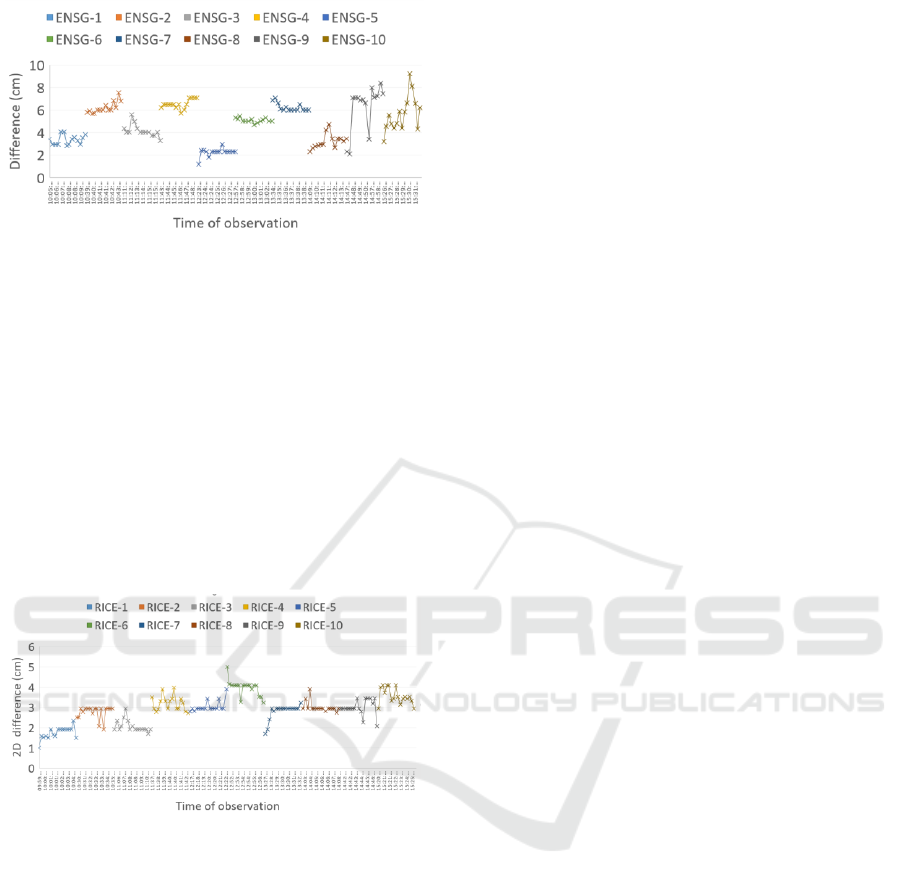
Figure 5: 2D planimetric differences of nine sets of
observations based on ENSG mount point.
Figure 5 shows the differences with sub-nine-
centimeter levels of all ENSG@20km mount point
sets. We can distinguish four sets (1, 3, 5 and 8). Sets
5 and 8 reappear again to have good results like as in
the LAUR case. The values of sets (2, 4, 6, and 7) are
lower than the seven-centimeter difference level. Sets
9&10 shows chaotic behavior with differences
varying between 2 and 9 cm difference level. We can
give the same conclusion as for the LAUR mount
point. Both have a 20 km distance from the reference
point. We can use them as alternative mount points if
the RICE mount point is disabled.
Figure 6: 2D planimetric differences of 10 sets of
observations based on RICE mount point.
Figure 6 shows the differences with sub-five
centimeter levels of all RICE@9km mount point sets.
The measurement differences are stable within one
centimeter for each set. These results confirm the
preliminary results and ensure the continuity,
stability, and reliability of this mount point for use in
topographic or surveying works within a 9 km
distance.
4 DISCUSSION
Knowing that topographic works in France are
subject to the decree of September 16, 2003. The
accuracy classes Land surveying needs to respect an
accuracy level depending on the objective of the
project and the scale of the plan (“Arrêté du 16
septembre 2003 portant sur les classes de précision
applicables aux catégories de travaux topographiques
réalisés par l’Etat, les collectivités locales et leurs
établissements publics ou exécutés pour leur compte
- Légifrance,” n.d.). It gives 10 cm accuracy class for
cadastral map scale of 1/500 and 20 cm for 1/1000 to
1/2000. With this discussion, we can confirm that the
RICE Centipede mount point within 10 km tends to
provide a five cm accuracy level. On the other hand,
the 20km mount points (LAUR and ENSG) offer a 10
cm accuracy level. Therefore, the accuracy of RTK
positioning presented in this work indicates that it is
possible to use it in land surveying with 1/500 –
1/1000 and 1/2000 map scale factor.
15 cm with no confirmed stability (SGC and
GPTR). If the accuracy level is fixed to be 10 cm
level, one should not use mount points with distances
over 48 km. Nevertheless, this criterion of distance is
to be reconsidered after the OUIL mount point at 19
km distance has an accuracy level above 16 cm.
Furthermore, we detect for a set of observations using
the LAUR@19km mount point we see a huge leap in
accuracy. The problem is that there are no indicators
in real-time to alert the user of such a sudden out-of-
accuracy range and thus out of use. We can point to
the case of two mount points ENSG and ENSG2,
where both are in the same place so the same distance
from the user. However, they give different levels of
accuracy for broadcast corrections (ENSG-5 cm and
ENSG2-10cm). Hence, there is doubt about the
quality of broadcast corrections without any kind of
warnings sent to users in real-time.
After all, the user can use Centipede RTK network
with Low-cost GNSS receivers and SW Maps
application, but the user needs to control his work. To
do so we suggest having some control points in the
surveying area. These control points could be the
result of high accuracy GNSS receiver for example.
Then periodically compare the Centipede-RTK
coordinates with the control point coordinates to
eliminate the out-of-use problem and verify the
consistency of the accuracy level. Finally, in the case
of land surveying with a map scale of 1/200 to 1/500,
we cannot trust the use of LCRA dependent on
Centipede-RTK without verification with control
points, because the user has no reliable indication of
accuracy in real time. Nevertheless, it is a good
alternative to be used for small-scale maps starting
from 1/1000.
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
216

5 CONCLUSIONS
We test the feasibility of using a low-cost GNSS
receiver and antenna for land surveying based on
corrections broadcast from a collaborative network of
RTK mount points in France. The interface is SW
Maps, a free GIS Android application for
smartphones. We conclude that the nearest centipede
mount point does not mean that it is the best one to
use. The indicators of accuracy are not representative
in real-time using the SW Map smartphone
application and the mount points of the collaborative
free RTK network (Centipede). The corrections sent
by Centipede mount points may change dramatically
without any warning message for users in real-time.
The use of low-cost GNSS receivers/antennas with
the Centipede-RTK network connected via SW Maps
GIS free smartphone application should be controlled
and verified to ensure the reliability of the corrections
used for land surveying.
For Future work, we intend to automatically
record the data without the user intervention in the
SW Map to generate temporal series for long-term
measurement. Test the differences near ENSG,
ENSG2, LAUR, and OUIL mount points within less
than 10 km to examine the results of our work. Use
the corrections of Centipede using a high-quality
receiver-antenna and compare at the same time with
low-cost GNSS receiver-antenna results for the same
conditions to examine if there are notable differences.
Explore the possibility of using Centipede corrections
as an alternative solution in RTK mode for high-
quality receivers when the paid network broadcast is
lost. Finally, explore the archive of Centipede RTK
databases in RINEX format newly available in the
RENAG databases.
REFERENCES
Arrêté du 16 septembre 2003 portant sur les classes de
précision applicables aux catégories de travaux
topographiques réalisés par l’Etat, les collectivités
locales et leurs établissements publics ou exécutés pour
leur compte - Légifrance [WWW Document], n.d. URL
https://www.legifrance.gouv.fr/jorf/id/JORFTEXT000
000794936 (accessed 2.18.25).
Bellone, T., Dabove, P., Manzino, A.M., Taglioretti, C.,
2016. Real-time monitoring for fast deformations using
GNSS low-cost receivers. Geomatics, Natural Hazards
and Risk 7, 458–470.
https://doi.org/10.1080/19475705.2014.966867
Broekman, A., Gräbe, P.J., 2021. A low-cost, mobile real-
time kinematic geolocation service for engineering and
research applications. HardwareX 10, e00203.
https://doi.org/10.1016/j.ohx.2021.e00203
Calculs GNSS Réseau en ligne | RGP [WWW Document],
n.d. URL https://rgp.ign.fr/SERVICES/calcul_online.
php (accessed 9.8.22).
Caldera, S., Realini, E., Barzaghi, R., Reguzzoni, M.,
Sansò, F., 2016. Experimental study on low-cost
satellite-based geodetic monitoring over short
baselines. Journal of Surveying Engineering 142,
04015016.
Calibrated Survey GNSS Tripleband + L-band antenna
(IP67) [WWW Document], n.d. Geo-matching. URL
https://geo-matching.com/products/calibrated-survey-
gnss-tripleband-l-band-antenna-ip67 (accessed
2.18.25).
Cina, A., Piras, M., 2015. Performance of low-cost GNSS
receiver for landslides monitoring: test and results.
Geomatics, Natural Hazards and Risk 6, 497–514.
https://doi.org/10.1080/19475705.2014.889046
GNSS Science Support Centre fosters collaboration across
scientific communities through the provision of GNSS
science-based products and services., 2021. GSSC
Home [WWW Document]. URL https://gssc.esa.int/
(accessed 2.19.25).
Hamza, V., Stopar, B., Ambrožič, T., Sterle, O., 2021a.
Performance Evaluation of Low-Cost Multi-Frequency
GNSS Receivers and Antennas for Displacement
Detection. Applied Sciences 11, 6666.
https://doi.org/10.3390/app11146666
Hamza, V., Stopar, B., Ambrožič, T., Turk, G., Sterle, O.,
2020. Testing Multi-Frequency Low-Cost GNSS
Receivers for Geodetic Monitoring Purposes. Sensors
20, 4375. https://doi.org/10.3390/s20164375
Hamza, V., Stopar, B., Sterle, O., 2021b. Testing the
Performance of Multi-Frequency Low-Cost GNSS
Receivers and Antennas. Sensors 21, 2029.
https://doi.org/10.3390/s21062029
Hamza, V., Stopar, B., Sterle, O., Pavlovčič-Prešeren, P.,
2023. Low-Cost Dual-Frequency GNSS Receivers and
Antennas for Surveying in Urban Areas. Sensors 23,
2861. https://doi.org/10.3390/s23052861
INRAE: research for Agriculture, Food and Environment
[WWW Document], n.d. URL https://www.inrae.fr/en
(accessed 2.18.25).
Jackson, J., Saborio, R., Anas Ghazanfar, S., Gebre-
Egziabher, D., Davis, B., University of Minnesota.
Department of Aerospace Engineering and Mechanics,
2018. Evaluation of Low-Cost, Centimeter-Level
Accuracy OEM GNSS Receivers (No. MN/RC 2018-
10).
Le Reseau Centipede RTK [WWW Document], n.d.
Centipede RTK. URL https://docs.centipede.fr/
(accessed 2.18.25).
Leica Viva GS10 et GS25 – Récepteurs GNSS de haute
précision [WWW Document], n.d. URL https://leica-
geosystems.com/fr-fr/products/gnss-
systems/receivers/leica-viva-gs10-gs25 (accessed
2.18.25).
Sammuneh, M.A., El Meouche, R., Eslahi, M., Farazdaghi,
E., 2023. Low-Cost Global Navigation Satellite System
Low-Cost GNSS Receivers Reliability Using Centipede RTK Network for Land Surveying
217

(Low-Cost GNSS) for Mobile Geographic Information
System (GIS), in: Ben Ahmed, M., Boudhir, A.A.,
Santos, D., Dionisio, R., Benaya, N. (Eds.), Innovations
in Smart Cities Applications Volume 6. Springer
International Publishing, Cham, pp. 105–117.
Sanna, G., Pisanu, T., Garau, S., 2022. Behavior of Low-
Cost Receivers in Base-Rover Configuration with
Geodetic-Grade Antennas. Sensors 22, 2779.
https://doi.org/10.3390/s22072779
Seeber, G., 2003. Satellite Geodesy. Walter de Gruyter.
Semler, Q., Mangin, L., Moussaoui, A., Semin, E., 2019.
DEVELOPMENT OF A LOW-COST CENTIMETRIC
GNSS POSITIONING SOLUTION FOR ANDROID
APPLICATIONS. Int. Arch. Photogramm. Remote
Sens. Spatial Inf. Sci. XLII-2/W17, 309–314.
https://doi.org/10.5194/isprs-archives-XLII-2-W17-
309-2019
Stopar, B., Sterle, O., Pavlovčič-Prešeren, P., Hamza, V.,
2024. Observations and positioning quality of low-cost
GNSS receivers: a review. GPS Solut 28, 149.
https://doi.org/10.1007/s10291-024-01686-8
SW Maps - GIS & Data Collector – Applications - Google
Play [WWW Document], n.d. URL
https://play.google.com/store/apps/details?id=np.com.
softwel.swmaps&hl=fr (accessed 2.18.25).
Teunissen, P.J., Montenbruck, O. (Eds.), 2017. Springer
handbook of global navigation satellite systems.
Springer International Publishing, Switzerland.
Tsakiri, M., Sioulis, A., Piniotis, G., 2017. Compliance of
low-cost, single-frequency GNSS receivers to
standards consistent with ISO for control surveying.
International Journal of Metrology and Quality
Engineering 8, 11.
ZED-F9P module [WWW Document], 2023. u-blox. URL
https://www.u-blox.com/en/product/zed-f9p-module
(accessed 2.18.25).
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
218
