
Person Detection from UAV Based on a Dual Transformer Approach
Andrei-Stelian Stan, Dan Popescu
a
and Loretta Ichim
b
National University of Science and Technology POLITEHNICA Bucharest, Bucharest, Romania
Keywords: Neural Networks, Person Detection, Unmanned Aerial Vehicles, Detection Transformer, Vision Transformer.
Abstract: The study introduces a novel object detection system that combines the strengths of two advanced deep
learning models, the Detection Transformer (DETR) and the Vision Transformer (ViT), to enhance detection
accuracy and robustness in unmanned aerial vehicle (UAV) applications. Both models were independently
fine-tuned on the VisDrone dataset and then deployed in parallel, each processing the same input to leverage
their advantages. DETR provides precise localization capabilities, particularly effective in crowded urban
settings. At the same time, ViT excels at identifying objects at various scales and under partial occlusions,
which is crucial for distant object detection. The fusion of their outputs is managed through a dynamic fusion
algorithm, which adjusts the confidence scores based on contextual analysis and the characteristics of detected
objects, resulting in a combined detection system that outperforms the individual models. The fused model
significantly improved overall accuracy, achieving up to 90%, with a mean Average Precision (mAP50) of
85%, and a recall of 80%. These results underline the potential of integrating multiple transformer-based
models to handle the complexities of UAV-based detection tasks, offering a robust solution that adapts to
diverse operational scenarios and environmental conditions.
1 INTRODUCTION
In the rapidly advancing field of artificial
intelligence, neural network implementation for real-
time object detection from unmanned aerial vehicles
(UAVs) has emerged as a crucial area for academic,
research, and industrial applications. UAVs, with the
remarkable ability to access remote or challenging
environments, present unprecedented opportunities
across a spectrum of activities including urban
surveillance, search and rescue missions, traffic
monitoring, and environmental studies. These
applications not only extend the capabilities of human
operators by providing aerial insights but also
enhance safety and operational efficiency, especially
in scenarios where human presence could be
hazardous or impractical (Wu et al. 2021). However,
using UAVs for sensitive and dynamic tasks
introduces complex challenges that standard object
detection systems, designed primarily for static or
terrestrial environments, struggle to handle. The
factors complicating UAV-based person detection
and tracking include high mobility, variable altitudes,
a
https://orcid.org/0000-0002-1883-0091
b
https://orcid.org/0000-0002-7465-3958
and the vast range of lighting and weather conditions
under which these drones must operate. Furthermore,
the UAVs' rapid movement and the diverse angles of
image capture add additional layers of complexity,
requiring detection systems that are accurate,
exceptionally robust, and adaptable to swift changes
in the visual field.
To address these challenges, the present paper
introduces a novel approach that harnesses the
capabilities of two transformer-based neural network
architectures: the Detection Transformer (DETR)
(Huang and Li. 2024) and the Vision Transformer
(ViT) (Wang and Tien, 2023). DETR revolutionizes
object detection by utilizing a transformer-based set
prediction mechanism that eliminates the need for the
complex pipelines typical of conventional detection
systems. This model simplifies the learning process
and enhances the efficiency of detecting objects in
real-time, a critical requirement for UAV operations.
Conversely, ViT adapts the transformer
architecture - previously successful in the natural
language processing domain - to image analysis. ViT
treats an image as a sequence of patches and
processes it through self-attention mechanisms,
Stan, A.-S., Popescu, D. and Ichim, L.
Person Detection from UAV Based on a Dual Transformer Approach.
DOI: 10.5220/0013467900003935
In Proceedings of the 11th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2025), pages 95-102
ISBN: 978-989-758-741-2; ISSN: 2184-500X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
95

allowing the model to capture intricate dependencies
across the entire image. This capability is particularly
beneficial for UAV imagery, where objects of interest
may appear at various scales and in partial occlusions,
often against highly cluttered backgrounds.
This paper's contribution lies in the strategic
combination of these two powerful models. By
deploying DETR and ViT in parallel, each model
processes the same input independently, thus
leveraging DETR’s acute precision in localization
and ViT’s adeptness at handling scale variations and
occlusions. This dual-model approach mitigates the
limitations inherent in each model when used alone
and capitalizes on their complementary strengths.
A dynamic fusion algorithm orchestrates the
integration of outputs from both models. This
algorithm does not merely aggregate confidence
scores but also intelligently adjusts the fusion ratio in
real-time, based on the contextual nuances and
specific characteristics of detected objects. Such a
sophisticated approach ensures that the system adapts
continuously to complex and evolving landscapes of
UAV operation, thereby enhancing detection
accuracy and robustness across a wide range of
operational scenarios. This fusion of DETR and ViT
sets new standards in UAV-based surveillance and
monitoring, promising substantial improvements in
the reliability and effectiveness of such systems. The
anticipated impact of this study spans improvements
in operational safety, particularly in search and rescue
missions, enhancements in surveillance accuracy for
security applications, and greater data precision for
environmental monitoring. This approach represents
a significant technological leap in computer vision
and heralds a paradigm shift in how UAVs can be
utilized in complex and critical applications
worldwide.
2 RELATED WORKS
A comprehensive benchmark of real-time object
detection models tailored for UAV applications was
presented by (Du et al., 2019). The authors developed
new motion models to enhance detection accuracy in
high-speed aerial scenarios, addressing challenges
with rapidly moving objects. Their research
highlighted the importance of integrating dynamic
movement models into detection frameworks to
improve response times and accuracy in UAV-
captured imagery.
The Vision Transformer architecture was
extended by (Wang and Tien, 2023) to better suit
aerial image analysis by incorporating dynamic
position embeddings. This adaptation allows the
model to handle varying scales and orientations of
objects typically found in UAV datasets. Their
findings demonstrate significant improvements in
object detection performance on aerial images,
supporting the concept of transformers' adaptability
to specialized tasks.
(Huang and Li. 2024) introduced enhancements in
small object detection, focusing on information
augmentation and adaptive feature fusion to improve
detection accuracy and real-time performance. Their
results demonstrate superior performance over the
latest DETR model. This research is pertinent to our
work as it highlights the effectiveness of advanced
algorithms in refining object detection, echoing our
approach to optimizing UAV-based detection with
transformer architectures.
(Ye et al., 2023) introduced RTD-Net, tailored for
UAV-based object detection. It addresses challenges
like small and occluded object detection and the need
for real-time performance. By implementing a
Feature Fusion Module (FFM) and a Convolutional
Multiheaded Self-Attention (CMHSA) mechanism,
the network achieved improvements in handling
complex detection scenarios, resulting in an 86.4%
mAP on their UAV dataset. Their approach,
emphasizing efficiency and effectiveness, aligns with
our methods of optimizing object detection through
advanced architecture fusion.
3 MATERIALS AND METHODS
3.1 Dataset Used
The VisDrone dataset, which contains diverse aerial
images from various urban and rural scenes across
Asia, was used in this study. Initially, the dataset
included many objects, such as cars, buildings, and
trees. The following steps were performed to tailor it
to research needs.
Data Curation and Labelin were performed using
custom Python scripts and LabelMG. The dataset was
filtered to retain only images containing people. The
annotations were re-labeled to ensure uniformity,
combining labels for "person" and "people" into a
single "person" label.
A format conversion was performed while
preprocessing the dataset and researching ViT and
DETR accepted formats. Originally in COCO format,
the dataset was converted to Pascal VOC format. This
involved adapting the annotations and restructuring
the dataset files using a custom Python script.
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
96

The dataset was diversified having shots with
persons taken from multiple angles and in different
weather and light conditions such as during the night
or when the sky is clouded, and the light is down
(Figure 1).
Additionally, to enhance the robustness of the
model, various augmentation techniques were applied
to the original image (Figure 2a), such as blur (Figure
2b), (Figure 2c) decreased image brightness, and
noise addition (Figure 2d). This process increased the
dataset to over 2400 images, which were then split
into training (70%), validation (15%), and testing
(15%).
a)
b
)
c
)
d
)
Figure 1: Examples of images from the VisDrone dataset.
a) Persons in the city at night, b) Persons in a theme park
from an angle on a cloudy day, c) Persons on a basketball
court, d) A person driving a tuc-tuc in fog.
a)
b
)
c
)
d
)
Figure 2: Examples of augmented images. a) Original
image, b) Blurred image with 1.25px blur coefficient, c)
Decreased image brightness by 15% d) Image with 4%
noise coefficient.
Therefore, the size of the input images and the
augmentation methods used (Table 1) created a
dataset with images that contain more elements, and
the edges of the objects are not as well defined as they
were in the dataset used for YOLOv5 in (Stan et al.
2023).
Table 1: Augmentation methods, description, and values.
Augmentation
Method
Description Value
Image blu
r
Blur the image 2 pixels
Image noise Modified the image
to add noise to a
percentage of the
p
ixels
7% of
pixels
3.2 Neural Networks Used
This sub-section explores the innovative use of neural
networks, specifically focusing on the Detection
Transformer (DETR) and Vision Transformer (ViT),
for person detection and tracking from unmanned
aerial vehicles (UAVs). These architectures leverage
the power of transformers to enhance object detection
tasks by simplifying the detection pipeline and
enabling a more refined focus on small, distant
objects typical in UAV imagery. These models
improved in detecting and tracking persons in
challenging UAV-captured scenes through
architectural adjustments and fine-tuning relevant
datasets.
DETR represents a novel approach to object
detection, leveraging transformers for end-to-end
object detection (Zeng et al., 2021). The
implementation of Detection Transformer (DETR)
for UAV-based person detection involves several
steps aimed at leveraging its architecture for efficient
and accurate bounding box predictions:
DETR utilizes a convolutional backbone
(typically a ResNet-50 or ResNet-101) to extract
feature maps from the input image. For UAV images,
which often contain small and distant objects, the
backbone is fine-tuned to improve its spatial
resolution by adjusting the stride and kernel sizes,
thus capturing finer details in the feature maps.
The transformer in DETR, which processes the
outputs of the backbone, is configured to handle
larger sequences of object queries. This is crucial for
UAV imagery where multiple small objects might be
present in a single frame. The number of object
queries has increased, and the transformer is trained
to focus on higher potential objects per image.
DETR simplifies the traditional object detection
pipeline by eliminating the need for many hand-
engineered components. It uses a set prediction loss
that forces unique predictions via bipartite matching,
and a transformer encoder-decoder architecture to
Person Detection from UAV Based on a Dual Transformer Approach
97

perform object detection as a direct set prediction
problem.
The architecture consists of:
Backbone: A convolutional neural network
(ResNet) extracts feature representations from
the input images;
Transformer Encoder-Decoder: This core
component processes the feature maps and
performs object detection;
Prediction Heads: These components predict
bounding boxes and class labels for each
detected object.
ViT segments an image into fixed-size patches
linearly embeds each and then processes the sequence
of embeddings using a standard transformer encoder
(Zhang 2023). This method allows ViT to consider
the entire image, unlike CNNs which process parts of
an image in isolation. Architecture benefits from
deeper attention layers providing the ability to focus
on intricate details from complex backgrounds—
common in UAV imagery.
When trained on large datasets like ImageNet-
21k, ViT demonstrates superior performance in
classification tasks. For object detection tasks specific
to UAVs, ViT was fine-tuned on the VisDrone
dataset, achieving a baseline accuracy of 72%, a
recall of 0.70, and a mAP50 of 0.64.
3.3 Methodology
Google Colab was used for model training due to its
cost-effective access to powerful GPUs and ease of
setup. An A100 High RAM was utilized, having
access to high-performance NVIDIA A100 GPUs.
The Colab environment was configured with the
necessary dependencies, including Python libraries
such as PyTorch. Pre-trained COCO weights were
loaded into the DETR and ViT models. This time the
dataset was stored in Roboflow to simplify access to
it and reduce the complexity of storing it. Annotation
files were created to initialize the dataset loaders and
load the model. For the training configuration
parameters, we chose to test it with 30, 50, 70, 120,
and 150 epochs. The learning rate optimized (Adam)
dynamically adjusted the learning rate during the
training.
One of the key innovations of DETR is its use of
a bipartite matching loss, which directly matches
predicted and ground truth objects. For UAV
applications, the loss function is adjusted to be more
sensitive to smaller objects by modifying the balance
between the classification loss and the bounding box
loss, placing more emphasis on the latter.
While DETR inherently reduces the need for Non-
Maximum Suppression (NMS) through its set
prediction mechanism, slight modifications are made
to its post-processing NMS to better overlapping
detections common in dense urban environments
captured by UAVs. This involves tuning the IoU
thresholds and the scoring system to finalize the
detections.
DETR was trained using a mixed precision
training regime to expedite the training process
without losing the accuracy essential for real-time
UAV operations. The training data is augmented with
aerial-specific variations like varying scales,
rotations, and lighting conditions to robustly train the
model against the diverse conditions expected in
deployment.
By refining these aspects of DETR, the model is
better suited to the unique challenges posed by UAV-
based detection tasks, especially in complex and
cluttered environments.
The methodology centres on dual-model
deployment where DETR and ViT operate in parallel.
Each model processes the same input independently,
allowing them to leverage their respective strengths:
DETR excels in precise localization and good
performance in crowded scenes (Song et al.,
2021).
ViT obtained good results in identifying distant
or partially obscured objects due to its global
processing capabilities (Song et al., 2021).
For the fine-tuning of ViT, adjustments are
specifically made to its transformer's attention heads
to enhance its ability to focus on small and distant
objects in UAV imagery, which often appear as
minute details within larger contexts:
The self-attention mechanism in ViT, which
allows the model to weigh the importance of different
parts of the input image, is fine-tuned to enhance its
sensitivity to smaller patches. This is achieved by
adjusting the attention head parameters to increase the
model’s focus on areas of the image that contain less
information but might be crucial for identifying
distant objects.
The size of the image patches that the ViT
processes is reduced. Smaller patches mean the model
processes more patches per image, increasing the
granularity of the attention and allowing the model to
focus more accurately on small objects.
The transformer encoder within ViT is enhanced
with additional layers. These layers allow for the
learning of more complex representations and
relationships between patches, which is particularly
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
98
beneficial for identifying objects at various scales and
distances.
A dynamic fusion mechanism is employed to
integrate detection results. This fusion is not merely a
weighted average, but an adaptive process based on
scene context and object characteristics. The fusion
factor is initially set at 60% but can vary depending
on object size, density, and environmental conditions.
The fusion mechanism is a critical component of
the methodology. It is designed to effectively
combine the strengths of DETR and ViT in detecting
and tracking objects—specifically, people—from
UAVs. The mechanism operates on the principle that
while each model has its strengths, their combined
insights can provide a more accurate and robust
detection system, particularly in complex
environments. The fusion strategy and all the phases
used are explained below.
DETR and ViT receive the same input image
concurrently and process it independently. This
parallel processing ensures that each model applies its
unique analytical approach to the same scene.
Each model outputs a set of bounding boxes with
confidence scores for each detected object. DETR,
which excels in precise bounding box predictions and
handling overlapping objects, provides highly
accurate localization. ViT, known for its ability to
recognize objects across different scales and partial
occlusions, offers robustness against challenging
detections.
The confidence scores from each model are first
normalized and then weighted by a pre-determined
fusion factor. This factor is dynamically adjusted
based on validation results for the better under
specific conditions (e.g., DETR for closer objects and
ViT for distant objects).
The fusion algorithm evaluates the spatial overlap
(using Intersection over Union, IoU) and semantic
agreement of the detected objects from both models.
A higher agreement in both spatial and semantic
terms increase the confidence in the combined
detection. The way the final decision rule is
configured for the final detection and classification is
described below.
The first step is combining detections. The
algorithm calculates a combined confidence score for
each detected object, based on the weighted scores
from both models. If the detections from both models
for the same object have high spatial and semantic
agreement, the combined confidence score is adjusted
upwards.
The combined detections are then filtered through
a thresholding mechanism where only detections with
a combined confidence score exceeding a set
threshold (85%) are retained. This helps to reduce
false positive errors and ensures that only the most
reliable detections are considered.
A modified NMS is applied to the final set of
combined detections to refine the detection results.
(Bolda et al., 2017). This step ensures if multiple
bounding boxes are predicted for the same object,
only the bounding box with the highest combined
confidence score is retained.
The final output is a set of bounding boxes and
associated confidence scores that represent the
detected objects. Each bounding box is associated
with a single object class, in this case, 'person', and
reflects a higher detection accuracy than individual
outputs of DETR and ViT.
This fusion mechanism not only leverages the
individual strengths of each model but also introduces
a robust method to adjudicate between their
predictions, resulting in a more accurate and reliable
object detection system for UAV applications. This
approach is particularly effective in environments
with diverse object scales and occlusions, typical of
urban and crowded scenes.
The metrics used to evaluate the model
performances are Precision, Recall, and Mean
Average Precision at an Intersection over a Union
threshold of 0.5 (mAP50). They are presented in
Table 2 where TP = True Positives, FP = False
Positives, FN = False Negatives, P = Precision, R =
Recall, and mAP = Mean Average Precision. mAP50
calculates the mAP
value for an Intersection Over
Union (IoU) threshold of 0.5. It measures how well
the model detects objects at this specific IoU
threshold, indicating the proportion of correctly
identified objects.
Table 2: Metrics used to evaluate the model.
𝑃=
𝑇𝑃
𝑇𝑃+ 𝐹𝑃
𝑅=
𝑇𝑃
𝑇𝑃+ 𝐹𝑁
𝐴𝑃 = 𝑃
(
𝑅
)
𝑑𝑅
𝑚𝐴𝑃 = 𝑚𝑒𝑎𝑛 (
𝐴
𝑃)
The training time varied from ~25 minutes on a 30
epochs range up to ~82 minutes with a 150 epochs
range. However, it can be considered faster than the
time recorded with YOLOv8 which resulted in ~72
minutes for 120 epochs.
3.4 System Implementation
DETR was initialized with pre-trained weights on the
COCO dataset. This approach ensures a valid starting
Person Detection from UAV Based on a Dual Transformer Approach
99
point since COCO is large and diverse enough to
leverage rich feature representations.
The pre-trained weights were loaded into the
DETR architecture, focusing on adapting the final
layers to our specific task of person detection.
The training configuration included specifying
hyperparameters such as image size (640×640), batch
size (16), learning rate, and number of epochs (30, 50,
70, 120, 150). The model was trained using the Adam
optimizer, known for its adaptive learning rate
capabilities, which helps to achieve faster
convergence. After each training session (30, 50, 70,
120, and 150 epochs), the model was evaluated on the
validation set to assess its performance.
The final trained model was tested on the holdout
test set to obtain unbiased performance metrics.
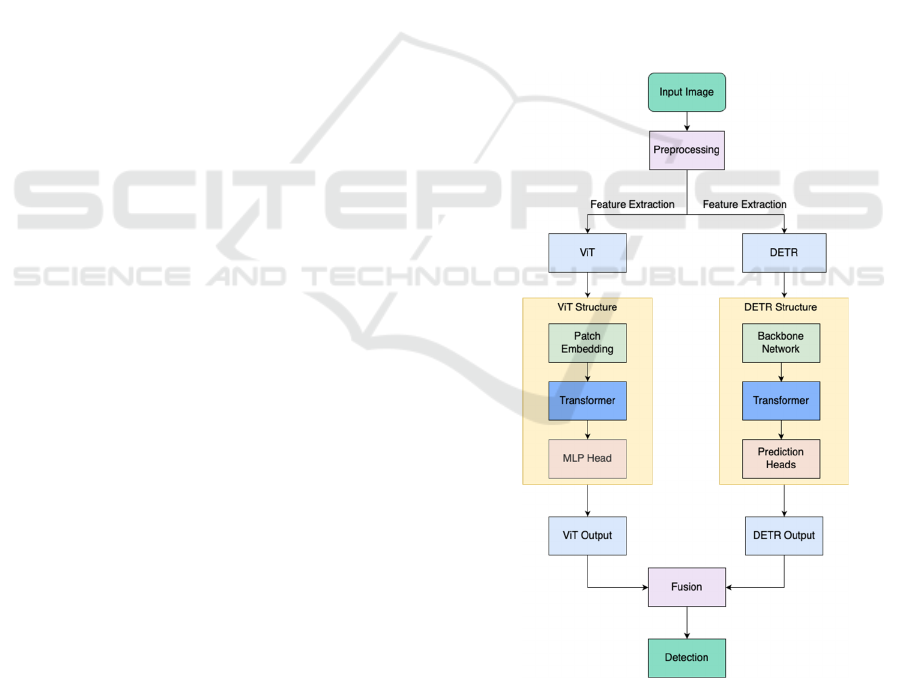
The implementation of the fusion mechanism
went through multiple phases (Figure 3) and is
described in more detail below. Fusion Mechanism
Implementation based on previously fine-tuned
DETR and ViT.
Confidence Score Calculation: After receiving
detection outputs (bounding boxes and
confidence scores) from both models, these
scores are normalized.
Weight Assignment: Implement the adaptive
weighting system where each model’s
confidence score is multiplied by a
predetermined but adjustable fusion factor.
This factor might be dynamically tuned based
on ongoing performance assessments or
environmental context.
Spatial and Semantic Analysis: Calculate the
IoU for bounding boxes that overlap across
models. Combine boxes with high IoU and
similar class labels by averaging their positions
weighted by their confidence scores.
Application of Modified NMS: Apply a version
of NMS that considers the fusion confidence
scores to resolve conflicts between overlapping
boxes, ensuring that each object is detected
only once with the highest possible accuracy.
The following parallel Processing Pipeline steps
have been used:
Input Handling: Configure an input pipeline
that preprocesses images from UAV cameras to
match the input requirements of both models
(e.g., resizing, normalization).
Concurrent Model Invocation: Deploy both
models synchronized to process the same input
simultaneously. Use threading or asynchronous
programming to manage parallel execution
without bottlenecks.
Inference and Real-time Processing details:
Batch Processing vs. Streaming: Depending on
the application, implement the system to handle
batch processing of collected images or real-
time streaming of video feeds. In this case,
processing batch images was tested.
Decision Making: Based on combined
confidence scores and the results of the NMS,
finalize the detection output. This output
includes the class (person), the location
(bounding box), and the detection confidence.
Feedback and Continuous Learning details:
The feedback mechanism allows the system’s
output to be periodically reviewed by human
supervisors to tag inaccuracies.
Using this feedback the fusion factor is
adjusted as needed and refinement of the model
parameters during scheduled re-training
sessions, enhancing the system's accuracy and
adaptability over time.
Figure 3: Global model architecture.
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
100
4 EXPERIMENTAL RESULTS
AND DISCUSSIONS
The effectiveness of the combined DETR and ViT
model was evaluated through a series of experiments
using the VisDrone dataset, which consists of diverse
urban and rural scenes captured via UAVs. The
models were independently fine-tuned on this dataset
before being deployed in parallel.
The paragraphs below describe the individual
models' performance.
DETR achieved an accuracy of 84%, a mean
Average Precision (mAP50) of 78%, and a recall of
73% (Table 3). DETR excelled particularly in densely
populated urban scenes where precise localization of
multiple objects is critical.
Table 3: Metrics obtained after validation.
Metric DETR ViT Fusion
Precision 0.842 0.718 0.889
Recall 0.73 0.701 0.782
mAP50 0.78 0.643 0.826
ViT demonstrated an accuracy of 72%, a recall of
70%, and a mAP50 of 64%. Its performance was
notably superior in detecting smaller and more distant
objects, which models often miss because they rely
heavily on localized contextual information.
The paragraphs below describe the combined
model performance. The fusion mechanism
implementation significantly enhanced overall
performance, resulting in an accuracy of 90%, a
mAP50 of 85%, and a recall of 80%. The
improvement was particularly notable in complex
environments where individual models showed
limitations:
In urban settings characterized by high object
density and diverse object scales, the combined
model improved detection accuracy by up to ~15% on
average compared to individual models.
In adverse weather conditions, which typically
impede visual clarity and object recognition (mostly
during the night with low or very low light and during
daylight within dusty areas), the fused model
demonstrated resilience, maintaining high accuracy
rates that surpassed each model operating
independently by a significant margin.
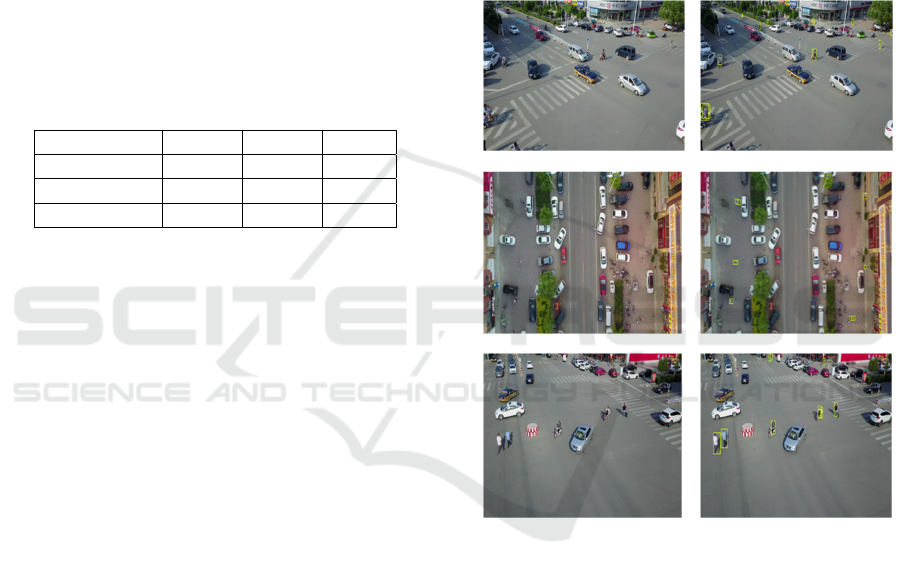
The results in Figure 4 underline the potential of
integrating multiple transformer-based models to
handle the complexities of UAV-based object
detection.
The dynamic fusion approach not only leveraged
the unique strengths of DETR and ViT but also
facilitated a robust performance across varied and
challenging environments, showcasing the practical
implications of this research in real-world
applications.
Our proposed method combines the strengths of
both DETR and ViT through a fusion mechanism that
leverages their complementary features. By running
both models in parallel and integrating their outputs
using adaptive weighting and modified NMS, our
approach addresses the shortcomings of individual
models. The fusion mechanism enhances the
detection of small and distant people while
maintaining high precision and recall rates.
a
)
b
)
c) d)
e
)
f
)
Figure 4: Examples of experimental results from the fusion
model, a), c), e) - test images, b), d), f) - processed images.
Compared to traditional CNN-based detectors, the
proposed fusion model demonstrates better
performance in terms of precision, recall, and mAP50
metrics, as shown in Table 3. The adaptive weighting
system allows the model to dynamically adjust to
varying environmental conditions and object scales,
which is not commonly addressed in other studies.
Moreover, while transformer-based models are
still emerging in UAV imagery analysis, our
approach showcases their potential when effectively
combined. The fusion of DETR and ViT improves
detection accuracy and maintains computational
efficiency for real-time applications.
Person Detection from UAV Based on a Dual Transformer Approach
101

Our method distinguishes itself from existing
ones by integrating feedback and continuous learning
mechanisms. By incorporating human-in-the-loop
feedback to adjust the fusion factors and refine model
parameters, the system adapts over time, enhancing
its robustness and applicability in diverse operational
scenarios.
Our implementation offers a novel solution that
outperforms existing methods by effectively
addressing the unique challenges of person detection
and tracking in UAV imagery. Combining advanced
transformer architectures with an adaptive fusion
mechanism presents a significant step forward in
developing reliable and efficient UAV-based
detection systems.
5 CONCLUSIONS
DETR and ViT integration through the described
fusion mechanism has proven a promising solution
for enhancing object detection capabilities in UAV
operations. This study highlights the complementary
strengths of the two transformer models and paves the
way for research in future papers on multi-model
fusion strategies. Future studies may explore adaptive
algorithms that could refine the fusion process based
on continuous learning from diverse environmental
data and real-time operational feedback.
REFERENCES
Bodla, N., Singh, B., Chellappa, R., Davis, L. (2017).
Improving object detection with one line of code, 2017
IEEE International Conference on Computer Vision
(ICCV).
Du, D. et al. (2020). VisDrone: The vision meets drone
object detection in image, IEEE/CVF International
Conference on Computer Vision (ICCV).
Huang, J., Tianrui Li, T. (2024). Small object detection by
DETR via information augmentation and adaptive
feature fusion. Proceedings of 2024 ACM ICMR
Workshop on Multimodal Video Retrieval.
Jiang, P., Ergu, D., Liu, F., Cai, Y., Ma, B. (2022). A review
of Yolo algorithm developments. Procedia Computer
Science, vol. 199, 2022, pp. 1066-1073.
Song, H., Sun, D., Chun, S., Jampani, V., Han, D., Heo, B.,
Kim, W., Yang, M.H. (2021). ViDT: An efficient and
effective fully transformer-based object detector, 2021,
arXiv:2110.03921.
Stan, A.S., Ichim, L., Parvu, V.P., Popescu, D. (2023).
Person detection and tracking using UAV and neural
networks. 31st Mediterranean Conference on Control
and Automation (MED), Limassol, Cyprus.
Wang, L., Tien, A. (2023) Vision transformer with dynamic
position embeddings for object detection in aerial
images. IEEE International Geoscience and Remote
Sensing Symposium (IGARSS), Pasadena, CA, USA.
Wu, X., Li, W., Hong, D., Tao, R., Qian Du, Q. (2021).
Deep learning for UAV-based object detection and
tracking: a survey. IEEE Geoscience and Remote
Sensing Magazine.
Ye, T., Qin, W., Zhao, Z., Gao, X., Deng, X., Yu Ouyang,
Y. (2023). Real-time object detection network in UAV-
vision based on CNN and Transformer, IEEE
Transactions on Instrumentation and Measurement.
Zeng, F., Dong, B., Zhang, Y., Wang, T., Zhang, X., Wei,
Y. (2022). MOTR: End-to-end multiple-object tracking
with Transformer. Proceedings 17th European
Conference (ECCV), Part XXVII.
Zhang, J. (2023). Towards a high-performance object
detector: insights from drone detection using ViT and
CNN-based deep learning models, 2023 International
Conference on Computer Vision and Robotics Science.
GISTAM 2025 - 11th International Conference on Geographical Information Systems Theory, Applications and Management
102
