
A Tool for V2X Infrastructure Placement
Michael Kl
¨
oppel-Gersdorf
a
and Joerg Holfeld
b
Fraunhofer IVI, Fraunhofer Institute for Transportation and Infrastructure Systems, Dresden, Germany
Keywords:
Vehicle-to-Everything (V2X) Communication, Intelligent Transport System (ITS)-G5, Cellular V2X
(C-V2X), Road-Side Unit, Intersections, Planning.
Abstract:
V2X technology sees an increasing rollout all over Europe, for instance as part of the C-Roads initiative. These
rollouts are put into operation with implementing several use cases like Traffic Signal Priority request (TSP) for
public transport or emergency vehicles or the provision of Green-Light Optimized Speed Advisory (GLOSA).
Depending on the use case, the placement of V2X communication equipment, like Road-Side Units (RSUs),
is essential for successful implementation of services. In this paper, a tool for V2X planning is introduced,
which allows the efficient and fast estimation of V2X communication ranges especially in densely developed
areas, reducing the need for costly measurement campaigns. Predicted data is compared with the results of a
real-world measurement campaign in the city of Chemnitz, Germany.
1 INTRODUCTION
A variety of Vehicle-to-Everything (V2X) ser-
vices, like Green-Light Optimized Speed Advisory
(GLOSA) or Traffic Signal Priority request (TSP),
require Road-Side Units (RSUs) installed at signal-
ized intersections. To provide services successfully,
transmission of messages must be guaranteed over a
certain distance, e.g., receiving eco-driving informa-
tion only briefly before the stop line does not help.
While V2X communication based on IEEE 802.11p
or C-V2X can reach distances of more than 1 km un-
der optimal conditions, these communication ranges
are much reduced in high-density areas like city cen-
ters, due to shadow fading, reflections, etc. Although
there is a wealth of literature on the optimal place-
ment of RSU, e.g., (Astudillo Le
´
on et al., 2024), they
are generally inspired by cell radio planning, i.e., with
the goal of serving a certain area with the least num-
ber of units, while still having enough bandwidth to
allow the realization of the V2X services even con-
sidering a large number of connected vehicles. Sig-
nal attenuation due to buildings and foliage is gen-
erally ignored, although these have a significant im-
pact on transmission, up to completely blocking com-
munication (Young et al., 2014) (the measurements
conducted only included frequencies up to 4.9GHz,
but similar effects are expected for the current V2X
a
https://orcid.org/0000-0001-9382-3062
b
https://orcid.org/0000-0002-1618-4241
technology, which uses 5.9 GHz). In addition, place-
ment is not considered to be near a signalized inter-
section. This contrasts starkly with the realities when
planning equipment for services like GLOSA or TSP.
Typically, an RSU is installed at every signalized in-
tersection, as a direct connection to the traffic light
controller is required to get signal phase information
or influence the signal plan. Furthermore, bandwidth
is not a direct consideration as the penetration with
connected vehicles is rather low (typically less than
1%) and no immediate growth is expected in the near
to mid future.
The propagation of V2X in urban areas was al-
ready considered in (Granda et al., 2017), where a
ray-launching method coupled with a ray-tracing soft-
ware was used to simulate propagation. Interestingly,
this paper suggests that a simple exponential path-
loss (as used in this study) might not be sufficient to
model all necessary propagation effects. A similar ap-
proach as described here was already introduced in
(Otto et al., 2023), although that paper was concerned
with the implementation of TSP and does not provide
insight into the workings and quality of the predic-
tions. What the presented tool has in common with
the cited research is the usage of a path-loss model
(Goldsmith, 2005) to model radio propagation.
The specific reason for the presented research is
situated in a shift the way TSP is carried out in Ger-
many. Currently, most public transport providers use
R09 telegrams (Schemel et al., 1990) transmitted us-
638
Klöppel-Gersdorf, M. and Holfeld, J.
A Tool for V2X Infrastructure Placement.
DOI: 10.5220/0013471200003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 638-644
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

ing a digital modulation scheme at frequencies in the
146MHz − 174MHz bands, which are designated for
analog radio in the European Union. Currently, a
channel spacing of 20 kHz is used, but due to har-
monization in the European Union, the channel spac-
ing will change to 12.5 kHz until the end of 2028.
Furthermore, a part of the previously used frequency
spectrum will be dedicated to other usages in the fu-
ture. As a significant amount of current radio hard-
ware installed in public transport is not able to oper-
ate under the new conditions, there is a currently a
shift towards using V2X (mainly based on ETSI ITS-
G5 over IEEE 802.11p) communication to solve these
problems (Gay et al., 2022).
When realizing TSP using ETSI compliant mes-
sages, there are currently at least three possible im-
plementations:
1. Using the R09 container within the special vehicle
container in the Cooperative Awareness Message
(CAM),
2. using the R09 container inside the Signal Request
Extended Message (SREM),
3. or using a continuous registration flow using
the SREM and Signal Status Extended Message
(SSEM).
The first two methods have the advantage that the cur-
rent logic for registration (based on four defined lo-
cations for pre-registration, registration, door-closed,
deregistration) can still be employed, whereas the last
method allows to use the whole movement profile of
the public transport vehicle, allowing for a more tai-
lored usage of resources. Outside of research projects,
the third method is not being implemented in Ger-
many at the moment. The first method requires the
fewest channel resources, as the CAM must be sent
regularly as required by the standard. A downside of
this approach is that CAM do not hop using a geo-
based broadcast mechanism. This complicates TSP,
as the location for pre-registration can be located sev-
eral hundred meters before the intersection and a di-
rect communication between On-Board Unit (OBU)
in the vehicle and the RSU at the signalized intersec-
tion is required. This problem can be overcome by
the second implementation, as SREMs are allowed to
hop and message flows can be organized, for example,
with intermediate RSU.
In this paper, a tool for predicting V2X commu-
nication range is introduced which allows to estimate
RSU positions at signalized intersections, considering
surrounding building and allowing a sufficient range
to fulfill the desired use cases. A comparison between
real-world measurements and the modeling finalizes
this publication.
Figure 1: Measurements from test drives with RSSI vs
RSU-OBU distance (top) and the histograms over distances
and RSSI levels (below)).
The paper is organized as follows: The next sec-
tion introduces the theoretical background for pre-
diction of radio propagation and real-world measure-
ments. Section 2.2 summarizes the findings, includ-
ing a comparison between prediction and measured
values. The paper is concluded in the last section.
2 METHODOLOGY
In the current iteration of the proposed tool, a user
first identifies signalized intersections, which are to
be equipped with RSU. In a second step, informa-
tion of the desired coverage area (e.g., the registra-
tion points for public transport) have to be obtained.
Last, the user has to manually position the potential
RSU, considering constraints such as exiting posts,
ductwork, maximum cable length, etc. The tool then
uses a path-loss model as described below to predict
V2X radio propagation and checks if reception lev-
els are satisfactory for the given coverage area. If this
is not the case, the RSUs have to be either moved to
other positions or additional RSU have to be added.
2.1 Path-Loss Model and Link Budget
A simplified path-loss model according to (Gold-
smith, 2005) is used to estimate reception levels
caused by a RSU. This deliberately circumvents
the modeling of reflections, shadowing, and fast fad-
ing effects. Obstacles due to traffic flows are also
not considered and would require a statistical mod-
eling. Typically, data packets are transmitted with a
A Tool for V2X Infrastructure Placement
639

Figure 2: Measurement setup used for data gathering. On
the left is the RSU mounted on a mobile tripod, on the right
is the vehicle used for measurements. The V2X antenna is
visible on the top of the car.
robust and interference resistant modulation and cod-
ing scheme in accordance with the ITS-G5, so a V2X
message can be reliably received within cell bound-
aries. The penetration density of the radio channel
is not a limiting parameter due to the low traffic vol-
ume and small message size. A major focus was set
to identify the Line-of-Sight (LOS) or Non-Line-of-
Sight (NLOS) radio conditions between the transmit-
ter and receiver geometry, the main source of obstruc-
tions being buildings. Therefore, the building loca-
tions were extracted from OpenStreetMap (OSM) as
described in detail in the next section.
The RSU transmits with the highest allowed
power of 23.0 dBm within the frequency band for
V2X of 5.9 GHz. Due to the possible antenna po-
sitions at the masts, we consider a feeder loss of
−2.5dB and an omnidirectional modeled transmit-
ting antenna with 2.0dBi gain. Geometric perspec-
tives are taken into account in the antenna pattern, the
distance between RSU and OBU, as well as the rel-
ative height of 5.0 m. Ultimately, distances greater
than 750.0 m are not further modeled, as these are
not typical in an urban environment. The RSUs and
OBUs used are from the Cohda Wireless (see Section
2.3 below), which have a minimum reception level of
−100.0dBm, so that this parameter is used as a fur-
ther termination criterion for the modeling.
The path-loss coefficient was determined from
several measurement runs at various intersections and
RSU masts in Chemnitz. The power losses were
determined over the distance between the RSU and
OBU. The path-loss coefficient results in the double-
logarithmic representation as the slope of a regression
line (see Fig. 1). During the measurement campaign,
multiple situations occurred in which other road users
Table 1: The list of parameters for the link budget.
Link Budget Parameter Value
Transmit Power 23.0dBm
Feeder Loss −2.5dB
Omnidirectional RSU antenna 2.0dBi
Isotropic OBU antenna 0.0dBi
Height between RSU and OBU 5.0m
Path-loss exponent 2.6
Reference distance 20.0m
Reference offset −74.1dB
Penalty term for NLOS condition −33.0dB
Maximal transmission radius 750.0m
Minimal OBU sensitivity −100.0dBm
crossed the direct line of sight and thus caused addi-
tional attenuation. In order not to weight such mea-
sured values and to remove the temporal bias by stop-
ping at certain positions, the measurements were di-
vided into segments of 10.0m and only the median
value of the upper 20% percentile of all Received Sig-
nal Strength Indicator (RSSI) was selected to avoid
that obstacles downgrade the estimates. This assump-
tion is regarded valid since a constant transmit power
without a power control operates at the RSU side.
Furthermore, positions with a distance closer than
10.0m respectively RSSIs> −50.0dBm are ignored.
Finally, a path-loss coefficient of 2.6 dB per decade
was estimated and used to model the propagation en-
vironment. The table 1 summarizes all the included
parameters for the link budget.
2.2 Environmental Model via OSM
The decisive factor that influences the transmission /
reception conditions is the building environment and
the determination of the LOS and NLOS reception
conditions. The layouts of the buildings listed in
OSM were used for this purpose. The direct path
from RSU to OBU was sampled every 10.0 m and
their geocoordinates led to an Overpass-API query to
determine if the point was located within a building.
In the case of a building, the path was classified as
NLOS and the additional path-loss of −33.0dB was
used as the penalty term. The value of the penalty
term was not determined, only specified heuristically.
OSM was also used to extract reception points on the
roads used in the modeling.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
640
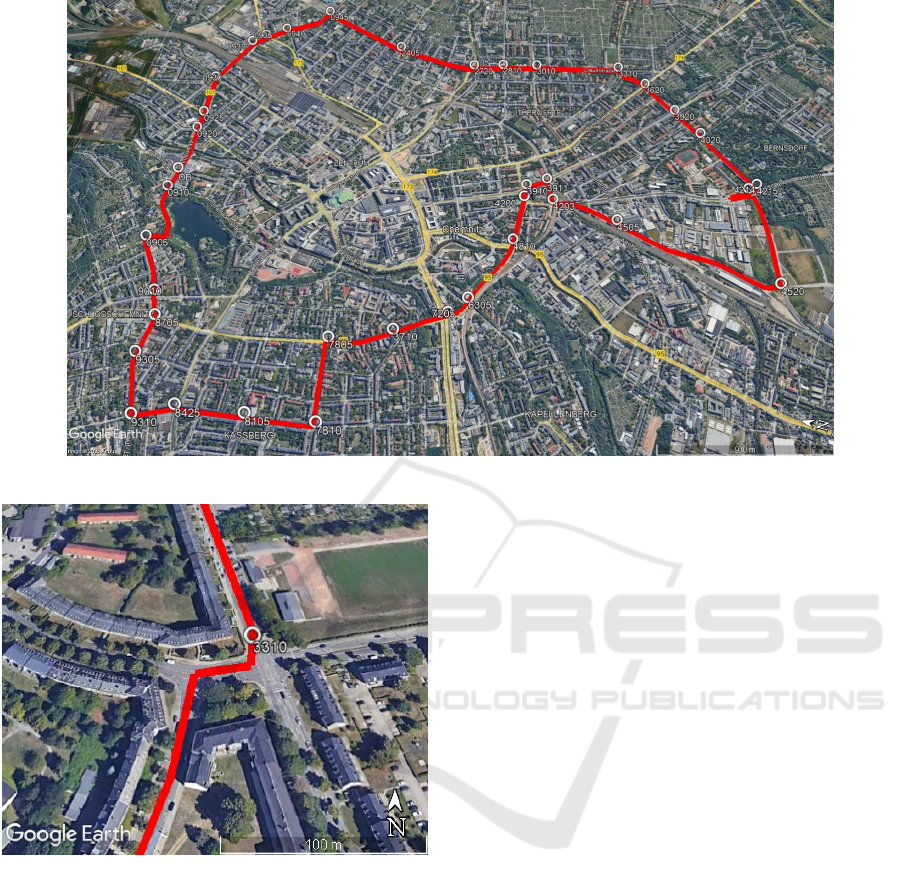
Figure 3: Route of the bus line 82 in Chemnitz, together with all (a total of 38) signalized intersections crossed by this line.
Figure 4: Example of one intersection, where manual mea-
surements were conducted.
2.3 On-site Measurements
The measurement system for real-life measurements
consists of an RSU mounted on a mobile post and an
OBU mounted in a test vehicle. For both units, a Co-
hda MK5 was employed, which used a custom com-
munication stack each (C4CART (Jacob et al., 2020)).
The mobile RSU was modified for battery operation.
Additionally, both OBU and RSU were equipped with
cellular communication units to facilitate connection
to a back-end server to allow real-time transmission of
measurement data. In case of loss of mobile connec-
tivity, measurement data can also be retrieved from
recorded .pcap files.
As we are mainly interested in deploying TSP, a
rather high vehicle (a Mercedes Vito) was used for the
measurements, which is higher than a typical passen-
ger vehicle. The complete measurement setup can be
seen in Fig. 2.
For localization, the internal Global Navigation
Satellite System (GNSS) modules of the respective
units were used. These offer an accuracy of 2.5 m
Circular Error Probable (CEP). For the measure-
ments, the CAM were used, which were send ac-
cording to the standard (ETSI EN 302 637-2 V1.4.1
(2019-04), 2019). This means that the RSU sends
messages with 1Hz, while the vehicle sends messages
with 1Hz − 10 Hz, depending on the dynamic state of
the vehicle.
2.4 Limitations of the Model
Task of this evaluation is not an exact reproduction
of the physical propagation behavior, but to get a
solid idea of the placement of the RSUs. In partic-
ular, the cell borders need further visual inspections,
since local obstacles might not be covered even in
high-resolution maps. Furthermore, a constant height
difference between sender and receiver is assumed
(comp. Table 1), which is not always true due to
the local topography. In addition, the low accuracy
of 2.5 m CEP in the GNSS measurements potentially
causes large differences between the reported and ac-
tual positions. Under some circumstances this leads
to a wrong assignment of a NLOS connection, when
comparing simulation with real world measurements.
A Tool for V2X Infrastructure Placement
641
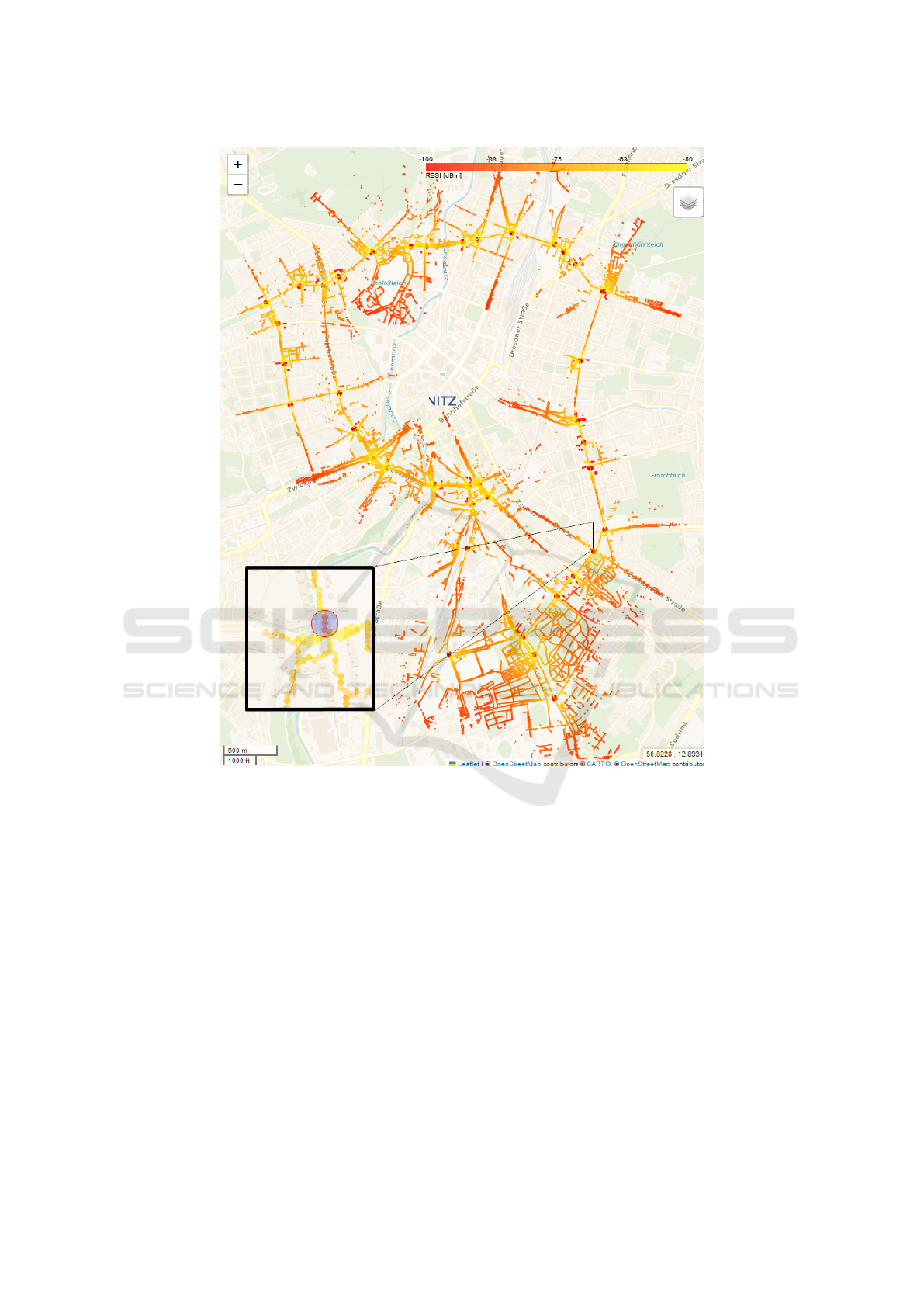
Figure 5: The proposed tool outputs the result as web page. Depicted are the prediction of RSSI levels at all signalized
intersections connected to bus line 82 (compare Fig. 3). Enlarged, in the lower left corner, are the results for the intersection
shown in Fig. 4. The red circle marks the position of the RSU. Overall, a good connectivity is predicted across the whole
route, when using the current positions of RSU.
3 EVALUATION AND
DISCUSSION
The proposed tool was used to plan the installation
of RSU along the bus line 82 in the city of Chem-
nitz, Germany. This bus line crosses a total of 40 sig-
nalized intersections and crossings, where 38 traffic
lights are equipped for prioritization (see Fig. 3). For
all intersection RSU placement was evaluated using
the tool using an estimated path-loss exponent. Of
these intersections, 15 were considered critical, that
is, the predicted range seemed insufficient to realize
the intended use case, that is, the preregistration loca-
tion was not covered or had only minimal radio cover-
age. One of these intersections is shown in Fig. 4. At
this specific intersection, the bus line route does not
follow the main road but instead takes a turn. As a re-
sult, one could expect a significant blockage of V2X
communication due to buildings. Manual measure-
ments were planned at these intersections to assess
whether the placement of secondary RSU would be
required. Due to road construction works, measure-
ments could only be taken for 11 of the identified in-
tersections. Consequently, these measurements were
used to evaluate the accuracy of the predictions.
For evaluation, the measurement area was divided
into hexagons. For a given position of the RSU, RSSI
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
642

0
1
1 1
2 7
6 0
7 6
9 2
1 2 4
1 1 3
1 1 1
9 6
5 5
3 0
1 8
1 0
4
2
1
5
3
0 0 0 0
2
0
- 1 0 0 1 0 2 0 3 0 4 0
0
5 0
1 0 0
1 5 0
C o u n t
P
m e a s u r e d
- P
p r e d
[ d B m ]
Figure 6: Comparison of real world measurements vs. the
predictions. The mean difference is 0.99 dBm with a stan-
dard deviation of 7.35 dbm. Values on the right result from
a too pessimistic modeling.
levels were predicted (see Fig. 5 for an example).
These were compared against the RSSI measured
during the test drive. In case there was more than
one measurement per hexagon, the 80% percentile of
all measurements was used. This was done to ex-
clude certain cases of NLOS, e.g., if communication
was blocked by another vehicle. For evaluation, 841
predicted values were compared with measurements,
where the measured values were retrieved from all
intersections included in the measurement campaign.
The result of this comparison can be seen in Fig. 6.
The difference between measured and predicted val-
ues usually lies between −15dBm − 20 dBm, with
some outliers greater than 25 dBm. These outliers
could be traced to an erroneously assigned NLOS
connection. This is due to the inaccuracy in GNSS,
i.e., the reported position resulted in NLOS connec-
tion, but the real position had LOS.
Generally, modeling differences larger than 0 dBm
do not cause problems, as long as all registration
points are still covered (for the case of TSP), as
this means that the actual connection was even better
than predicted. Values smaller than 0 dBm are more
concerning. Detailed investigations have shown that
these values appear mainly near the submitting sta-
tion, which means that some propagation properties
of the radios are not fully considered by the path-loss
model. As reception levels near the radio are typically
very high, this does not cause an issue for the overall
tool.
Although previous research (Eltahir, 2007) has
shown that the choice of the radio propagation model
has a significant impact on the results of the simu-
lations, our results actually validate the choice of a
simple path-loss model with a penalty term for NLOS
connections, at least if used for V2X infrastructure
planning. Compared to the ray-launching method
proposed by Granda et al. (Granda et al., 2017),
a similar mean error was achieved (0.99 dBm here
vs. 1.75 dBm). In contrast, their method achieves
a much lower standard deviation (2.54 dBm) ver-
sus 7.35 dBm. Although the results obtained us-
ing the ray-launching method are more accurate, ray-
launching requires ray-tracing software and hardware,
which are rather expensive to obtain and to oper-
ate, whereas the proposed algorithm runs on an of-
fice notebook. Given that V2X planning is mainly
contracted by public communities, the offset in costs
could justify the use of a less accurate model, espe-
cially if the results are still good enough for the de-
sired task.
4 CONCLUSIONS & OUTLOOK
Taking real-world measurements for 11 of the 38 sig-
nalized intersections required two people and a day of
work. Measurement of all intersections would have
taken nearly a week. In comparison, generating the
predictions took less than twenty minutes on an of-
fice notebook, most of this computation time. In gen-
eral, the proposed approach leads to a significant de-
crease in planning RSU placement. Furthermore, it
was shown that the model was able to sufficiently pre-
dict real-world radio propagation. Although the com-
parison was performed using IEEE 802.11p, it can be
equally used for C-V2X as the physical propagation
and radio frequencies are the same for both technolo-
gies.
However, there are some limitations of the cur-
rent approach. It works best when the local path-
loss exponent can be accurately estimated, which still
relies on real-world measurements. This is neces-
sary, as this exponent can vary wildly given the local
circumstances, for example, (Goldsmith, 2005) cites
measured path-loss exponents between 2.7 − 6.5. On
the other hand, already existing RSU could help with
this part by comparing reception levels with the posi-
tion reported in the CAM by connected vehicles al-
ready on the road today. Furthermore, currently a
constant difference between the height of RSU and
OBU are assumed. Although the model could also
handle varying height differences, this would com-
plicate the computations, e.g., buildings would need
to be checked for NLOS connections, but also the
ground, especially in hilly regions.
The current approach relies on OSM data. Since
this is an open-source effort, the quality of the data
differs. For some regions in Germany, for example,
Saxony, there exists a digital height model with 25 cm
A Tool for V2X Infrastructure Placement
643

resolution, which is captured from flight data. In ad-
dition to the higher accuracy, these data also contain
information on larger plants and their spread.
In the future, machine learning is planned to
be used for propagation prediction. Given enough
training and meta-data, it is assumed that some
kind of neural net can estimate the path-loss expo-
nent/propagation sufficiently. This would eliminate
the need to determine a path-loss exponent. In addi-
tion, in the current iteration, the position of the RSU
is still determined by hand. In a future iteration, this
position could also be computed using optimization
algorithms, which could consider constraints like the
distance to the traffic light controller (depending on
transmission technology, for example not longer than
100 meters for Power-over-Ethernet (PoE)) and phys-
ical restrictions on placement.
ACKNOWLEDGEMENTS
This research is financially supported by the project
ITS4Culture. Parts of the paper were translated from
German to English using a custom version of Chat-
GPT (FhGenie). Writefull AI was used to increase
the readability of the manuscript.
REFERENCES
Astudillo Le
´
on, J. P., Busson, A., de la Cruz Llopis,
L. J., Begin, T., and Boukerche, A. (2024). Strate-
gic deployment of rsus in urban settings: Optimiz-
ing ieee 802.11p infrastructure. Ad Hoc Networks,
163:103585.
Eltahir, I. K. (2007). The impact of different radio prop-
agation models for mobile ad hoc networks (manet)
in urban area environment. In The 2nd International
Conference on Wireless Broadband and Ultra Wide-
band Communications (AusWireless 2007), pages 30–
30.
ETSI EN 302 637-2 V1.4.1 (2019-04) (2019). ETSI EN
302 637-2 V1.4.1 (2019-04) Intelligent Transport Sys-
tems (ITS); Vehicular Communications; Basic Set of
Applications; Part 2: Specification of Cooperative
Awareness Basic Service. Standard, ETSI.
Gay, M., Grimm, J., Otto, T., Partzsch, I., Gersdorf,
D., Gierisch, F., L
¨
owe, S., and Sch
¨
utze, M. (2022).
Nutzung der c2x-basierten
¨
Ov-priorisierung an signal-
isierten knotenpunkten. Technical report.
Goldsmith, A. (2005). Wireless communications. Cam-
bridge university press.
Granda, F., Azpilicueta, L., Vargas-Rosales, C., Lopez-
Iturri, P., Aguirre, E., Astrain, J. J., Villandangos,
J., and Falcone, F. (2017). Spatial characteriza-
tion of radio propagation channel in urban vehicle-to-
infrastructure environments to support wsns deploy-
ment. Sensors, 17(6).
Jacob, R., Gay, M., Dod, M., Lorenz, S., Jungmann,
A., Franke, L., Philipp, M., Kloeppel-Gersdorf, M.,
Haberjahn, M., Gruschka, E., and Fettweis, G. (2020).
Ivs-kom: A reference platform for heterogeneous its
communications. In 2020 IEEE 92nd Vehicular Tech-
nology Conference (VTC2020-Fall), pages 1–7.
Otto, T., Partzsch, I., Holfeld, J., Kl
¨
oppel-Gersdorf, M., and
Ivanitzki, V. (2023). Designing a c-its communication
infrastructure for traffic signal priority of public trans-
port. Applied Sciences, 13(13).
Schemel, H. et al. (1990). Technische Anforderun-
gen an rechnergesteuerte Betriebsleitsysteme -
¨
Ubertragungsverfahren Datenfunk; Erg
¨
anzung 2
“Datensatz f
¨
ur Meldesysteme”. Technical report.
Young, W. F., Remley, K. A., Holloway, C. L., Koepke, G.,
Camell, D., Ladbury, J., and Dunlap, C. (2014). Ra-
diowave propagation in urban environments with ap-
plication to public-safety communications. IEEE An-
tennas and Propagation Magazine, 56(4):88–107.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
644
