
Towards a Cultural Perspective on Human-Robot Interaction
Bhavishya Swami
1 a
, Jeshwitha Jesus Raja
1 b
, Meenakshi Manjunath
1 c
, Amruta Rout
2 d
and
Marian Daun
1 e
1
Center for Robotics, Technical University of Applied Sciences W
¨
urzburg-Schweinfurt, Schweinfurt, Germany
2
Department of Mechanical and Automobile Engineering, CHRIST University, Bangalore, India
Keywords:
Human-Robot Interaction, Conceptual Framework, Cultural Influence.
Abstract:
Human–robot interaction is a rapidly emerging field whose scope and definition remain diffuse due to its broad
application across diverse robotics domains. Research in human–robot interaction typically moves beyond
simple input–output interfaces to explore more complex interactions, such as physical collaboration between
humans and robots. Consequently, various perspectives on human–robot interaction—ranging from techno-
logical considerations and cooperation modalities to trust and safety—have proliferated in both research and
practice. Although the priorities in human–robot interaction research often reflect industry demands and so-
cietal values, the cultural context in which these priorities evolve has received limited attention. In particular,
how different countries’ expectations shape the perceived importance of human–robot interaction perspectives
remains under-explored. A deeper understanding of these cross-cultural differences can foster a global view of
human–robot interaction and support the transfer of best practices across borders. Therefore, this paper exam-
ines representative case studies from Germany and India, highlighting key divergences in how human–robot
interaction is defined and approached in different cultural and industrial contexts.
1 INTRODUCTION
Human-robot interaction (HRI) is a growing field
gaining importance, for instance, in the context of in-
dustry 4.0 (Vemuri and Thaneeru, 2023; Daun et al.,
2023) or the introduction of advanced service robots
in daily life (Fukuda et al., 2011). Thus, research in
HRI stems from different robot system types. In ad-
dition, the multidisciplinary nature of HRI broadens
the field further. From a software engineering per-
spective, this variety of HRI and the resulting lack of
a clear definition, makes it hard to propose develop-
ment approaches properly considering HRI aspects of
robotic software. To help in this, taxonomies and clas-
sifications of HRI systems are used to structure the
field (e.g., (Onnasch and Roesler, 2021)).
Unfortunately, existing classifications primarily
focus on the technical aspects of HRI systems (e.g.,
(Agah, 2000)), with additional emphasis at times on
a
https://orcid.org/0009-0001-7209-8479
b
https://orcid.org/0009-0008-7886-7081
c
https://orcid.org/0009-0005-6421-1450
d
https://orcid.org/0000-0002-5410-4345
e
https://orcid.org/0000-0002-9156-9731
the social aspects of HRI (e.g., (Gervasi et al., 2020)),
or specific factors such as safety (e.g., (Zacharaki
et al., 2020; Manjunath et al., 2024)) and security
(e.g., (Akalin et al., 2023)). However, all these dimen-
sions are not independent of one-another, and, thus,
the interrelations between these are currently not well
reflected. For instance, the use of natural language
processing approaches for speech recognition (e.g.,
(Wuth et al., 2021)) is impacted by trust in the com-
pany (e.g., (Song and Kim, 2022)).
A challenge in defining a conceptual framework
that accounts for the influence of social factors on
technological components is the limited understand-
ing of cultural influences. With HRI research being
conducted around the world, the approaches are of-
tentimes not transferable from one country to another
due to a difference in social factors rooted in differ-
ent cultures. For instance, the attitude towards the
strictness and importance of safety and security dif-
fers between countries (cf. (Weng et al., 2009)). Data
protection might be a severe part of cultural life, for
example, as shown by the European Union’s data pro-
tection laws, which limits the use of technology in
some countries.
782
Swami, B., Jesus Raja, J., Manjunath, M., Rout, A. and Daun, M.
Towards a Cultural Perspective on Human-Robot Interaction.
DOI: 10.5220/0013471900003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 782-789
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

Therefore, in this paper, we argue that there is a
need for a conceptual framework of HRI that not only
considers and brings together technological and so-
cial factors, but explicitly takes a cultural perspective
on HRI into account. Such a conceptual framework
on HRI will allow for better classification and com-
parison of approaches, as well as supporting trans-
ferability of approaches from one country’s cultural
background to another. In this paper, we exemplarily
investigate the need for a conceptual framework con-
sidering case examples from Germany and India. In
doing so, we show the need to a) consider a cultural
perspective for HRI, and b) consider the influence of
culture on the interrelation between social factors and
technological components of HRI.
The paper is outlined as follows: Section 2 intro-
duces HRI and reviews existing taxonomies and re-
search related to culture in HRI. Section 3 presents
the initial conceptual framework for HRI, differenti-
ating between technical, social, and cultural perspec-
tives and their interrelations. Section 4 discusses a
case study from Germany and India. Finally, Section
5 concludes the paper.
2 RELATED WORK
2.1 Culture in HRI Research
The concept of culture has been extensively stud-
ied across disciplines, with each focusing on differ-
ent aspects such as shared customs, rules, attitudes,
and social practices (Koltko-Rivera, 2004). It encom-
passes diverse elements, including traditions, tech-
nologies, and collective behaviors (Matsumoto and
Juang, 1996). In computing, culture concerns en-
abling users to engage through the values and charac-
teristics of their cultural identity (Rauterberg, 2006).
Cultural values influence not only the develop-
ment of robots, but also the reciprocal impact of
robotic cultural values on human behavior (Samani
et al., 2013), further contributing to trust and trustwor-
thiness in HRI. Cultural studies also contribute to en-
suring effective and meaningful interactions between
humans and robots (Keay, 2012). A study by Evers et
al. (Evers et al., 2008) examined how cultural frame-
works shape user behavior in HRI by comparing re-
lational and group self-construal, highlighting the in-
fluence of culture and background on these interac-
tions. Building on this, Salem et al. (Salem et al.,
2014) explored politeness, showing that user percep-
tions of robots are influenced by social norms and ex-
pectations. Additionally, cultural norms impact user
comfort levels regarding proxemics, or the spatial be-
havior of robots (Joosse et al., 2014).
Social robots are designed to interact with peo-
ple in a natural, interpersonal manner, unlike robots
in industries where their actions are predetermined,
and the environment is controlled. Social robots are
meant to achieve positive outcomes in diverse appli-
cations such as education, health, quality of life, en-
tertainment, communication, and tasks requiring col-
laborative teamwork (Breazeal et al., 2016). These
applications contain global implications and in order
to enhance its global adoption, these robots should be
culturally competent (Lim et al., 2021). A case study
by Bennett et al. (Bennett et al., 2022) compares the
use of robotic companion pets in South Korea and
the United States, highlighting divergent cultural atti-
tudes toward robot anthropomorphization and utility.
Robots can also represent cultural emotions and thus
provide a framework for embedding culturally spe-
cific cues in robot designs (Dang et al., 2017). This
aligns with broader discussions on the ethical and
conceptual fragmentation of cultural robotics (Man-
souri and Taylor, 2024; Bruno et al., 2017).
In the context of WEIRD (Western, Educated, In-
dustrialized, Rich, and Democratic) societies, HRI
still lacks diversity (Seaborn et al., 2023). Cultural
contexts play a crucial role, as they vary signifi-
cantly across different cultures and must be studied to
promote inclusivity. A dynamic and adaptable HRI
system that incorporates user-specific cultural traits
can enable the development of culturally competent
robots (Bruno et al., 2017). Additionally, social psy-
chological theories provide a theoretical foundation
for understanding the cultural dimensions of human-
robot relationships (Smith et al., 2021).
These studies highlight the importance of culture
in shaping robotic behavior and interaction channels
to align with user expectations. Therefore, they can be
taken to advocate the need for a cultural dimension in
HRI research. However, these studies only investigate
the influence of culture on direct interaction between
human and robot. In contrast to our approach, they do
not consider cultural attitudes towards the use of tech-
nological components of HRI. Thereby, we aim at ex-
plaining country-specific differences in HRI research
which allows for comparability and transferability of
HRI research between different cultural contexts.
2.2 Existing Classifications
Based on the nature of the work performed, the type
of contact, and the restrictions of the workspace,
HRI can be categorized into different types. Refer-
ring to Bauer et al.’s (Bauer et al., 2016) catego-
rization of interaction types—which is widely used
Towards a Cultural Perspective on Human-Robot Interaction
783

in the field and covers numerous modalities—these
types include Human-Robot Cell, Human-Robot Co-
existence, Human-Robot Synchronization, Human-
Robot Cooperation, and Human-Robot Collaboration.
These types differ based on varying degrees of auton-
omy, which influence the dependencies between hu-
mans and robots (Jesus Raja et al., 2024).
In (Onnasch and Roesler, 2021), a taxonomy for
structuring and analyzing HRI was proposed which
contains emphasizing factors such as interaction
modalities, levels of autonomy, and user roles. This
taxonomy addresses the varying degrees to which hu-
mans and robots can collaborate—ranging from sim-
ple, sequential interactions to highly interdependent,
synchronized tasks. The taxonomy categorizes HRI
into three main types: Classification of interaction,
Classification of robot and Classification of the team.
Gervasi et al. (Gervasi et al., 2020) proposed a
conceptual framework to evaluate human-robot col-
laboration, comprising eight latent dimensions: au-
tonomy, information exchange, team organization,
adaptivity and training, task, human factors, ethics,
and cybersecurity. Within this framework, human
factors include elements such as workload, trust,
robot morphology, physical ergonomics, and usabil-
ity, while ethics encompasses aspects like social im-
pact and social acceptance. Notably, culture is not ex-
plicitly included as a dimension, despite its influence
on factors such as social acceptance, trust, and social
impact. This omission highlights a gap in addressing
cultural considerations.
3 CONCEPTUAL FRAMEWORK
The currently existing classifications in HRI primarily
consist of technical factors, such as degrees of auton-
omy, sensing capabilities, and human-machine inter-
face designs, and, to some extent, social aspects, such
as trust and acceptance. The incorporation of cultural
aspects, which influence the social aspects, is still
lacking. Therefore, we propose a conceptual frame-
work explaining the influence of cultural aspects on
social and technical dimensions of HRI. Figure 1 il-
lustrates the three perspectives, along with examples
and their interrelationships.
3.1 Technical Perspective
In the field of HRI, the technical perspective rep-
resents the infrastructure that allows interaction be-
tween humans and robotic systems. This perspec-
tive encompasses the essential hardware and software
components, ranging from sensing mechanisms to ad-
vanced computational architectures, that collectively
facilitate robot functionality. By examining these
technical elements, we can better understand what
components are required for the development of the
robotic system and how and why these components
are influenced by social and cultural aspects. For in-
stance, in collaborative manufacturing environments,
the integration of advanced perception systems with
precise motion control algorithms enables robots to
work safely alongside human operators while main-
taining optimal performance. In Figure 1, the block
labeled
1
⃝ provides a list of aspects from the techni-
cal perspective, for example:
• Sensing Mechanisms: These include environ-
mental sensors, cameras, and detection systems
that allow robots to perceive and understand their
surroundings, enabling safe and effective interac-
tion with humans.
• Actuation Systems: Components that enable
robots to interact with their environment by con-
verting energy into motion. This conversion pro-
cess allows robots to perform tasks ranging from
simple to complex. Actuators are the driving force
behind a robot’s ability to move.
• Computational Processing Units: High-
performance computing architectures handle
complex calculations and real-time decision-
making processes when the robot works.
• Interface Modalities: Robots communicate
with humans through various channels includ-
ing touchscreens, voice commands, and gesture
recognition systems. These different interaction
methods ensure that humans can communicate
naturally and effectively with robotic systems.
• Motion Control Algorithms: The smooth and
precise movements of robots are guided through
preplanned and executed trajectories. These algo-
rithms ensure robots move safely around humans
while efficiently completing their tasks.
• Perception Systems: Advanced software that
processes the data from various sensors to help
robots understand their environment. This
includes recognizing objects, tracking human
movements, and understanding spatial relation-
ships in the workspace.
• Human-Machine Interfaces: The points of in-
teraction between humans and robots are designed
to be intuitive and user-friendly. These interfaces
allow operators to communicate their intentions
and understand robot status easily.
• Communication Protocols: Various components
of a robotic system exchange information through
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
784
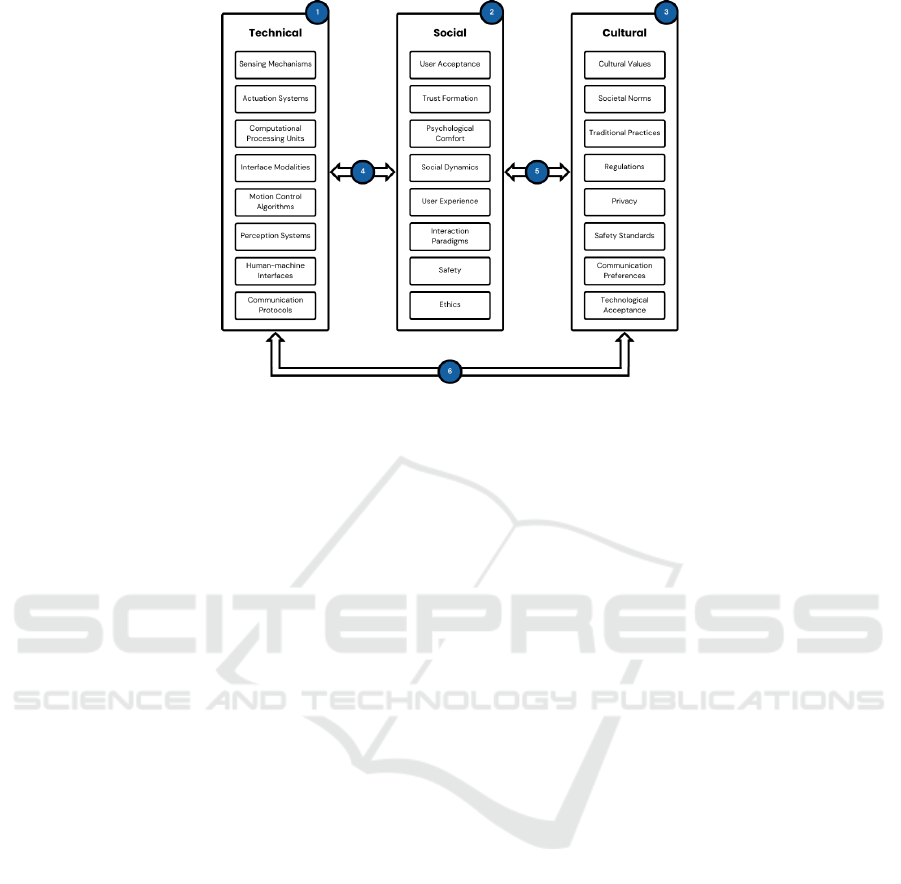
Figure 1: Conceptual HRI Framework Differentiating between Three Major Perspectives and Their Interrelations.
standardized methods. These protocols ensure re-
liable and efficient data flow, enabling coordinated
operation of all system parts.
3.2 Social Perspective
HRI fundamentally relies on understanding and ad-
dressing social dynamics between users and robotic
systems. For instance, in healthcare, robots must es-
tablish trust and maintain user comfort while perform-
ing tasks. The social perspective (labeled
2
⃝ in Fig-
ure 1) examines how humans perceive and respond to
robotic interactions, considering factors from initial
acceptance to long-term collaboration patterns. Im-
portant aspects of the social perspective contain:
• User Acceptance: This aspect tells how differ-
ent users adapt to and accept robotic systems, and
how this varies based on their experience and con-
text. For instance, healthcare workers may readily
accept assistive robots when they clearly under-
stand the benefits and receive proper training.
• Trust Formation: Building trust between hu-
mans and robots happens through consistent and
transparent robot behavior. When robots commu-
nicate their intentions clearly and perform reli-
ably, users develop confidence in working along-
side them.
• Psychological Comfort: The level of comfort
humans feel around robots depends on factors
like robot movement, speed, proximity, and pre-
dictability. Careful consideration of these ele-
ments ensures positively perceived HRIs.
• Social Dynamics: The way humans and robots
interact creates unique social patterns that evolve
over time. Understanding these dynamics helps in
designing more effective collaborative scenarios.
• User Experience: The overall interaction experi-
ence must be intuitive and satisfying for different
user groups. This includes various factors from
interface design to robot responsiveness.
• Interaction Paradigms: This aspect tells us
how robots behave in different social situations.
This includes determining when robots should be
proactive versus passive in their interactions.
• Safety: Beyond physical safety, ensuring that
users feel psychologically secure working with
robots is crucial. This encompasses both actual
and perceived safety measures.
• Ethics: Robots must operate within clear ethical
guidelines that respect human values and rights.
This includes considerations of privacy, auton-
omy, and fair treatment.
3.3 Cultural Perspective
The technical perspective represents the physical in-
frastructure enabling interaction between humans and
robotic systems, while the social perspective ad-
dresses the dynamics of these interactions. The cul-
tural perspective (labeled
3
⃝ in Figure 1) influences
both the technical and social aspects. This influence
on the technical aspects shapes the refinement of tech-
nical components that constitutes a robotic system.
It highlights how cultural factors impact robot de-
sign, behavior, and acceptance across different con-
texts and regions. Important cultural aspects include:
• Cultural Values: Different societies hold varying
beliefs about automation and HRI.
Towards a Cultural Perspective on Human-Robot Interaction
785

• Societal Norms: Acceptable robot behavior
varies across cultures, from communication styles
to physical proximity.
• Traditional Practices: Considering local cus-
toms and traditions can make robots user-friendly,
gaining user acceptance. For example, greeting
the human while passing by can have a positive
impact on the human.
• Regulations: Different regions have varying legal
requirements for robot deployment. These regula-
tions shape technical implementations and opera-
tional parameters.
• Privacy Expectations: Cultural attitudes toward
privacy affect how robots should handle personal
information and maintain appropriate boundaries.
• Safety Standards: Regional differences in safety
expectations require adaptable robot behavior and
safety protocols.
• Communication Preferences: The way robots
communicate must align with local customs and
preferences, from language use to non-verbal
cues. For example, colors differ based on cultural
preferences or professional rules.
• Technological Acceptance: Different cultures
show varying levels of openness to robotic tech-
nologies, affecting implementation strategies.
3.4 Technical-Social Interrelations
The interrelation between technical capabilities and
social requirements (labeled
4
⃝ in Figure 1) creates
crucial relationships that shape effective HRI imple-
mentation. For instance, in collaborative manufac-
turing or healthcare robotics, we observe how tech-
nical features must adapt to social needs, ensuring
both functional efficiency and user acceptance. The
following aspects highlight key areas where technical
and social interdependencies shape robot design and
functionality:
• Interaction Modalities: The way technical inter-
faces adapt to different user preferences impacts
acceptance and usability. For example, elderly
users might prefer simple voice commands, while
industrial workers may favor touchscreen inter-
faces for precise control.
• Robot Behaviors: The technical implementation
of motion control systems must consider social
factors like user comfort and safety. This includes
the robot adjusting its speed and maintaining ap-
propriate distances to humans.
• Communication Protocols: Technical feedback
systems influence trust development through clear
and consistent communication. Robots signaling
their next actions through visual or auditory cues
help users understand and predict robot behavior.
• Motion Planning Systems: How robots move
aligns with human psychological comfort. This
includes smooth trajectory adjustments when ap-
proaching humans and predictable movement pat-
terns in shared spaces. Additionally, user comfort
and safety concerns also influence the way motion
control systems are implemented.
3.5 Cultural-Social Interrelations
The relationship between social interaction patterns
and cultural norms (labeled
5
⃝ in Figure 1) influences
how robots should behave in different societies. Un-
derstanding these connections is crucial for develop-
ing robots that can operate effectively across diverse
cultural contexts. The following aspects highlight
key areas where cultural and social interdependencies
shape robot design and functionality:
• Cultural Attitudes: Social acceptance of robots
varies significantly across cultures, affecting how
users prefer to interact with them. Some societies
readily accept robots in care roles, while others
prefer limiting them to industrial applications.
• Risk Protocols: Safety measures must align with
cultural risk tolerance levels. This includes adapt-
ing robot behavior and safety protocols to match
local expectations and norms.
• Social Interaction Designs: Robot interaction
patterns need to reflect local communication
styles and customs. This affects, e.g., personal
space maintenance or communication timings.
• Privacy Mechanisms: Trust-building approaches
must consider cultural privacy expectations. This
influences how robots collect, handle, and com-
municate about user data.
3.6 Cultural-Technical Interrelations
The influence of cultural requirements on technical
implementations (
6
⃝ in Figure 1) shapes how robotic
systems are developed and deployed across different
regions. This relationship ensures that technical solu-
tions remain culturally appropriate and effective. The
following aspects highlight key areas where technical
and cultural interdependencies shape robot design and
functionality:
• Regulations: Technical control systems must
adapt to meet varying geographical safety and op-
erational requirements. This includes different
safety protocols, standards, and certification.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
786

• Data Protocols: Robots should process and store
information to align with local privacy standards
and cultural expectations about data handling.
• Natural Language Processing Systems: Lan-
guage processing capabilities must account for
cultural communication patterns, including for-
mal versus informal speech and non-verbal cues.
• Cultural Contexts: Technical development pri-
orities should reflect local values and needs, en-
suring that robot capabilities align with cultural
expectations and practices.
4 CASE EXAMPLE
The HRI assembly process used is a sorting pro-
cess performed collaboratively by humans and robots,
involving tasks such as categorizing, scanning, and
transporting. The cobot picks and places packages,
scans barcodes, and transports them to the desig-
nated zone. Humans handle irregularly shaped pack-
ages and resolve ambiguities, such as categorizing
new or unidentifiable items. The cobot operates in
close proximity to humans while adhering to strict
safety protocols to ensure smooth interaction. Figure
2 shows the technical, the social and cultural aspects
for India and Germany respectively. The figure shows
how the aspects differ significantly between the two
countries.
For example, in Germany, the technical aspect of
“advanced sensors and high-precision equipment” is
supported by the social aspect of a “technology-first
mindset,” which reflects how Germans prioritize in-
novation and quality. This social factor is further in-
fluenced by the cultural emphasis on “precision and
efficiency,” a value that strongly shapes the work cul-
ture of Germany. In contrast, in India, the techni-
cal implementation of “semi-automated flexible sys-
tems” is shaped by the social focus on “collabora-
tive, community-based dynamics,” which stems from
the cultural emphasis on “community and adaptabil-
ity.” India, being a labor-intensive country, necessi-
tates having a semi-automated system rather than a
completely automated one, allowing robots to work
alongside humans.
This systematic progression from cultural to so-
cial to technical aspects is evident in many scenarios
illustrated in Figure 2. For instance, standardized in-
terfaces and fully automated systems align with Ger-
many’s social emphasis on efficiency-focused user
experience and certification-based trust formation is
rooted in process-oriented cultural norms. Similarly,
the Indian approach of employing user-friendly inter-
faces and balanced automation with manual override
capabilities highlights how Indian manufacturing pri-
oritizes workforce diversity while embracing techno-
logical advancement.
However, the influence of culture on technical as-
pects does not always pass through social factors and
can directly shape technical implementations. For ex-
ample, in German manufacturing, the cultural foun-
dation of “process-oriented work culture” and “com-
prehensive guidelines” directly shapes the technical
aspect of “highly structured, well-documented sys-
tems.” In the Indian context, the cultural aspect of
“flexible work approaches” directly impacts techni-
cal solutions, resulting in “simple, user-friendly in-
terfaces.” This cultural-technical relationship is fur-
ther exemplified by the cultural emphasis on blending
modern and traditional methods, which translates into
adaptable, multilingual support systems to accommo-
date the diverse languages and cultures of each In-
dian state, as well as balanced automation solutions.
These examples demonstrate how cultural values such
as workforce diversity and adaptability directly shape
technical implementations in Indian manufacturing
settings.
The interdependencies shown for both Germany
and India are not one-to-one; a single cultural aspect
can influence multiple technical aspects, and a single
technical aspect can also be shaped by multiple cul-
tural factors. These examples highlight how cultural
differences, which are contrasting in nature for both
countries, shape perceptions and priorities, thereby
influencing both social dynamics and technical imple-
mentations. While Germany and India differ in social
aspects, these differences stem from their distinct cul-
tural foundations.
Robots in India are often designed to assist hu-
mans in manual tasks rather than replace them en-
tirely (Goodrich et al., 2008). Regarding cultural ac-
ceptance, perspectives in India vary based on socio-
economic factors and exposure to technology. Ur-
ban populations generally have welcoming and in-
tegrative views towards robots, while rural commu-
nities exhibit more diverse perceptions (Deshmukh
et al., 2018). For the Indian market, addressing so-
cietal concerns such as job displacement is critical.
Robots in India are designed to complement human
labor, which has fostered acceptance across diverse
communities (Haring et al., 2019). This emphasizes
the profound impact of cultural factors on the social
and technical dimensions of HRI. In contrast, Robots
in Germany are predominantly designed to meet high-
quality standards, adhering to the country’s rigorous
safety norms. In industrial settings, the focus is on
achieving precision and maximizing production with
minimal human involvement.
Towards a Cultural Perspective on Human-Robot Interaction
787
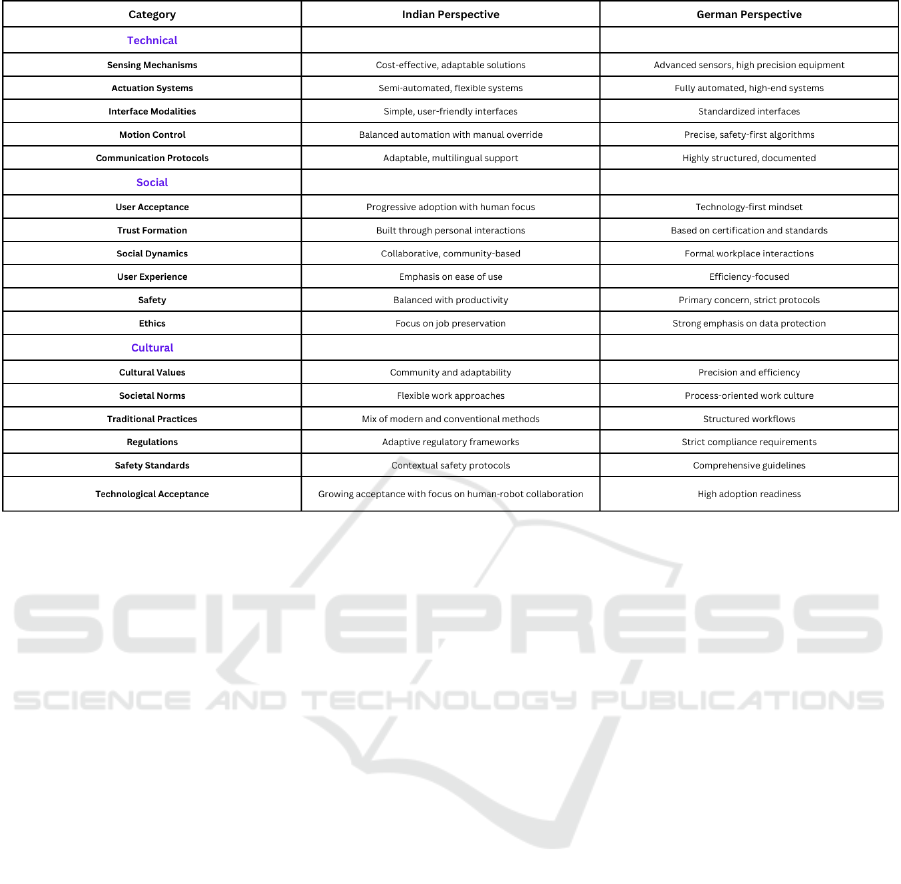
Figure 2: Conceptual HRI Framework: Comparative Overview of Indian and German Perspectives.
5 CONCLUSION
HRI continues to evolve as a multidisciplinary field,
providing innovative solutions to complex tasks that
require collaboration between humans and robots.
While HRI has seen significant research, especially
for the technical and social aspects, the influence of
cultural aspects still remains under-explored. This pa-
per addressed this gap by examining the cultural, so-
cial, and technical interdependencies in HRI through
a comparative case study of Germany and India.
The findings reveal that cultural values play a piv-
otal role in shaping key aspects of HRI, including
safety mechanisms, communication styles, and sys-
tem adaptability. In Germany, HRI systems empha-
size precision, compliance, and strict safety protocols,
reflecting cultural priorities rooted in structure and
standardization. In contrast, Indian systems prioritize
cost-effectiveness and collaborative human-robot dy-
namics, driven by cultural values of flexibility and in-
clusivity. These insights underscore the importance of
integrating cultural considerations into HRI design to
enhance adaptability and effectiveness in diverse en-
vironments. By embedding cultural awareness during
the early stages of system development, researchers
and practitioners can account for the varying needs,
preferences, and constraints of different societies. For
instance, integrating culturally tailored safety proto-
cols can enhance user trust and acceptance, while
designing adaptable communication systems ensures
that robots interact effectively across linguistic and
social boundaries. Moreover, culturally aware HRI
frameworks can better address ethical concerns, such
as privacy and job displacement, by aligning robot be-
havior with local societal norms. Such considerations
are crucial for fostering meaningful and sustainable
human-robot collaborations in global contexts.
REFERENCES
Agah, A. (2000). Human interactions with intelligent sys-
tems: research taxonomy. Computers & Electrical
Engineering, 27(1):71–107.
Akalin, N., Kiselev, A., Kristoffersson, A., and Loutfi, A.
(2023). A taxonomy of factors influencing perceived
safety in human–robot interaction. Int. Journal of So-
cial Robotics, 15(12):1993–2004.
Bauer, W., Bender, M., Braun, r., Rally, P., and Scholtz,
O. (2016). Lightweight robots in manual assembly–
best to start simply. Frauenhofer-Institut f
¨
ur Ar-
beitswirtschaft und Organisation IAO, Stuttgart, 1.
Bennett, C. C., Stanojevic, C., Kim, S., Lee, J., Yu, J., Oh,
J., Sabanovic, S., and Piatt, J. A. (2022). Compar-
ison of in-home robotic companion pet use in south
korea and the united states: a case study. In 2022 9th
IEEE RAS/EMBS Int. Conf. for Biomedical Robotics
and Biomechatronics (BioRob), pages 01–07. IEEE.
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
788

Breazeal, C., Dautenhahn, K., and Kanda, T. (2016). Social
robotics. Springer handbook of robotics, pages 1935–
1972.
Bruno, B., Chong, N. Y., Kamide, H., Kanoria, S., Lee, J.,
Lim, Y., Pandey, A. K., Papadopoulos, C., Papadopou-
los, I., Pecora, F., et al. (2017). Paving the way for
culturally competent robots: A position paper. In 26th
IEEE Int. Symp. on robot and human interactive com-
munication (RO-MAN), pages 553–560. IEEE.
Dang, T. L. Q., Tuyen, N. T. V., Jeong, S., and Chong, N. Y.
(2017). Encoding cultures in robot emotion represen-
tation. In 2017 26th IEEE Int. Symp. on Robot and
Human Interactive Communication (RO-MAN), pages
547–552. IEEE.
Daun, M., Manjunath, M., and Jesus Raja, J. (2023). Safety
analysis of human robot collaborations with grl goal
models. In Int. Conf. on Conceptual Modeling, pages
317–333. Springer.
Deshmukh, A., Krishna, S., Akshay, N., Vilvanathan, V.,
Sivaprasad, J., and Bhavani, R. R. (2018). Technology
acceptance, sociocultural influence and gender per-
ception of robots: A human robot interaction study
with naive users in rural india. In 2018 27th IEEE Int.
Symp. on Robot and Human Interactive Communica-
tion (RO-MAN), pages 1–6. IEEE.
Evers, V., Maldonado, H. C., Brodecki, T. L., and Hinds,
P. J. (2008). Relational vs. group self-construal: Un-
tangling the role of national culture in hri. In 3rd
ACM/IEEE Int. Conf. on Human robot interaction,
pages 255–262.
Fukuda, T., Di, P., Chen, F., Sekiyama, K., Huang, J., Naka-
jima, M., and Kojima, M. (2011). Advanced service
robotics for human assistance and support. In 2011
Int. Conf. on Advanced Computer Science and Infor-
mation Systems, pages 25–30. IEEE.
Gervasi, R., Mastrogiacomo, L., and Franceschini, F.
(2020). A conceptual framework to evaluate human-
robot collaboration. The Int. Journal of Advanced
Manufacturing Technology, 108:841–865.
Goodrich, M. A., Schultz, A. C., et al. (2008). Human–
robot interaction: a survey. Foundations and Trends®
in Human–Computer Interaction, 1(3):203–275.
Haring, K. S., Novitzky, M. M., Robinette, P., De Visser,
E. J., Wagner, A., and Williams, T. (2019). The dark
side of human-robot interaction: ethical considera-
tions and community guidelines for the field of hri.
In 2019 14th ACM/IEEE Int. Conf. on Human-Robot
Interaction (HRI), pages 689–690. IEEE.
Jesus Raja, J., Kranz, P., and Daun, M. (2024). Comparison
of dependencies for human-robot interaction types.
In Companion Proceedings of the 43rd Int. Conf. on
Conceptual Modeling, pages 98–110. CEUR-WS.org.
Joosse, M., Lohse, M., and Evers, V. (2014). Lost in prox-
emics: spatial behavior for cross-cultural hri. In Work-
shop on Culture-Aware Robotics, pages 1–6.
Keay, A. (2012). Cultural studies in the hri loop. In
ACM/IEEE Int. Conf. on Human-Robot Interaction,
pages 165–166.
Koltko-Rivera, M. E. (2004). The psychology of world-
views. Review of general psychology, 8(1):3–58.
Lim, V., Rooksby, M., and Cross, E. S. (2021). Social robots
on a global stage: establishing a role for culture dur-
ing human–robot interaction. Int. Journal of Social
Robotics, 13(6):1307–1333.
Manjunath, M., Jesus Raja, J., and Daun, M. (2024). Early
model-based safety analysis for collaborative robotic
systems. IEEE Transactions on Automation Science
and Engineering.
Mansouri, M. and Taylor, H. (2024). Does cultural robotics
need culture? conceptual fragmentation and the prob-
lems of merging culture with robot design. Int. Jour-
nal of Social Robotics, 16(2):385–401.
Matsumoto, D. and Juang, L. (1996). Culture and psychol-
ogy. Pacific Grove, pages 266–270.
Onnasch, L. and Roesler, E. (2021). A taxonomy to struc-
ture and analyze human–robot interaction. Int. Jour-
nal of Social Robotics, 13(4):833–849.
Rauterberg, M. (2006). From personal to cultural com-
puting: how to assess a cultural experience. udayiv–
information nutzbar machen. Kempter and Pv Hell-
berg, Editors.
Salem, M., Ziadee, M., and Sakr, M. (2014). Marhaba,
how may i help you? effects of politeness and cul-
ture on robot acceptance and anthropomorphization.
In 2014 ACM/IEEE Int. Conf. on Human-robot inter-
action, pages 74–81.
Samani, H., Saadatian, E., Pang, N., Polydorou, D., Fer-
nando, O. N. N., Nakatsu, R., and Koh, J. T. K. V.
(2013). Cultural robotics: The culture of robotics and
robotics in culture. Int. Journal of Advanced Robotic
Systems, 10(12):400.
Seaborn, K., Barbareschi, G., and Chandra, S. (2023). Not
only weird but “uncanny”? a systematic review of di-
versity in human–robot interaction research. Int. Jour-
nal of Social Robotics, 15(11):1841–1870.
Smith, E. R.,
ˇ
Sabanovi
´
c, S., and Fraune, M. R. (2021).
Human-robot interaction through the lens of social
psychological theories of intergroup behavior.(2021).
Song, C. S. and Kim, Y.-K. (2022). The role of the
human-robot interaction in consumers’ acceptance of
humanoid retail service robots. Journal of Business
Research, 146:489–503.
Vemuri, N. and Thaneeru, N. (2023). Enhancing human-
robot collaboration in industry 4.0 with ai-driven hri.
Power System Technology, 47(4):341–358.
Weng, Y.-H., Chen, C.-H., and Sun, C.-T. (2009). Toward
the human–robot co-existence society: On safety in-
telligence for next generation robots. Int. Journal of
Social Robotics, 1:267–282.
Wuth, J., Correa, P., N
´
u
˜
nez, T., Saavedra, M., and Yoma,
N. B. (2021). The role of speech technology in user
perception and context acquisition in hri. Int. Journal
of Social Robotics, 13:949–968.
Zacharaki, A., Kostavelis, I., Gasteratos, A., and Dokas, I.
(2020). Safety bounds in human robot interaction: A
survey. Safety science, 127:104667.
Towards a Cultural Perspective on Human-Robot Interaction
789
