
Comparison of Point Cloud and Surface Based Mapping for Autonomous
Vehicles
Christoph Br
¨
uckner
a
and Lucila Patino-Studencki
b
Faculty Mechanical and Automotive Engineering, Coburg University of Applied Sciences and Art, G
¨
uterstraße 8, Kronach,
Germany
Keywords:
Mapping, SLAM, Localization, Autonomous Driving, Robotics.
Abstract:
Mapping and localization are essential processes in robotics and autonomous systems, providing precise envi-
ronmental representation and real-time positioning. Unlike Simultaneous Localization and Mapping (SLAM),
which combines these tasks simultaneously, mapping and localization are often decoupled in applications that
require higher accuracy and efficiency from the outset, like autonomous vehicles. This study summarizes the
main families of map representations used in SLAM and investigates the applicability for standalone mapping
and localization tasks. Point cloud and surfaced based Mapping Methods, namely KISS-ICP and PUMA are
explored and evaluated numerically using the KITTI database. Key performance metrics accuracy, registra-
tion time during localization, and map size are analyzed to compare their effectiveness. The results provide
insights into the strengths and limitations of SLAM-based techniques when applied to decoupled processes.
1 INTRODUCTION
Autonomous vehicles (AV) are robots on the street,
which means that they are Machines (programmable
by a computer) that can move independently and per-
form complex actions similar to a living creature in-
teracting with its environment. In the case of AVs
their environment is defined by the road network
and other traffic participants, such as other vehicles,
pedestrians, and road infrastructure. In this environ-
ment, vehicles must operate reliably. To achieve this,
the vehicle must accurately determine its position (lo-
calization) and understand the constraints imposed by
its environment, that is, the mapping of static struc-
tures such as road boundaries, buildings, and trees.
Both localization and mapping are closely related
and are mainly addressed in the robotics literature un-
der the theme of simultaneous localization and map-
ping (SLAM). Therefore, this paper addresses var-
ious mapping methods used in robotic applications
and compares them based on how they represent
the environment, as well as the localization accuracy
they provide. The analysis focuses on “traditional”
methods and excludes artificial intelligence (AI) ap-
proaches, since their implementation is highly spe-
a
https://orcid.org/0009-0006-3378-0033
b
https://orcid.org/0009-0002-5349-422X
cific and their capabilities require a significant amount
of data. However, the presented map representations
are equally valid for AI approaches.
In the literature, some comparisons of Simultane-
ous Localization And Mapping (SLAM) approaches
exist. Some focus on a single family of representa-
tions like Iterative Closest Point (ICP), as in Pomer-
leau et al. (Pomerleau et al., 2015), or land-mark-
based maps, as in Dai et al. (Dai et al., 2023) and
Debeunne and Vivet (Debeunne and Vivet, 2020).
Other reviews compare multiple map representations
(e.g. (Schreier et al., 2015), an (Bao et al., 2023)),
but these are typically qualitative rather than quanti-
tative. As a result, these studies are limited to an-
alyze the characteristics of the representations with-
out performing any numerical evaluations. In this pa-
per, a numerical evaluation of various SLAM meth-
ods adapted for autonomous vehicles using the KITTI
dataset (Geiger et al., 2012) is presented.
The rest of this paper is organized as follows.
section 2 reviews the most common representations
and mapping methods used in robotics, while sec-
tion 3 emphasizes the algorithmic differences and
constraints of the mapping for autonomous driving.
section 4 compares two of the methods numerically
with respect to positioning accuracy and memory re-
quirements. The last section presents the main con-
clusions of the analysis.
Brückner, C. and Patino-Studencki, L.
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles.
DOI: 10.5220/0013473000003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 199-209
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
199
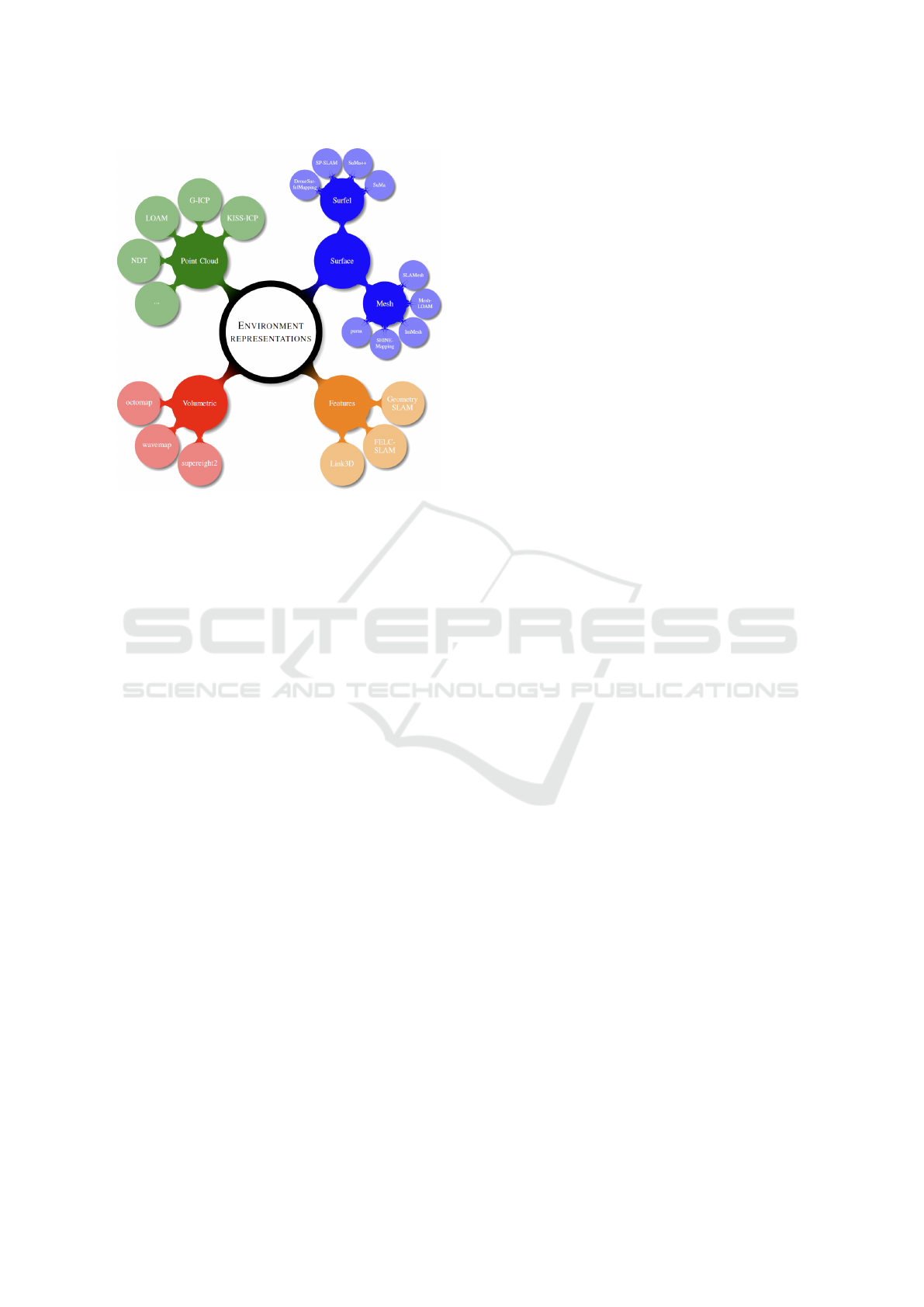
Figure 1: Overview of environment representation tech-
niques and mapping Implementations.
2 OVERVIEW OF MAPPING
METHODS
Mapping real-world environments is essential for au-
tonomous vehicle (AV) systems, with different meth-
ods offering unique strengths and limitations to repre-
sent the environment. Four main types of representa-
tion are found in the literature, namely: Point Clouds,
Surfaces, Volumetric and Features maps.
A summary of these different representation tech-
niques and some of their implementations in the field
of robotics and autonomous driving is shown in Fig-
ure 1. In the following the mentioned methods and
approaches to create the environment representation
(map) are described.
2.1 Volumetric Based Mapping
Approaches
Volumetric-based mapping methods are common in
robotics, offering robust 3D environment representa-
tion by dividing space into volumetric elements called
voxels. These discretize space into 3D grids, excel
in volumetric occupancy mapping and are well suited
for collision avoidance. Their major drawback is high
memory usage at finer resolutions. Methods like Oc-
toMap (Hornung et al., 2013; Wurm et al., 2010),
WaveMap (Reijgwart et al., 2023), and the method
of Vespa et al. (Vespa et al., 2018; Funk et al., 2021;
Vespa et al., 2019) known as supereight2. They dif-
fer in how they process and store information, pre-
senting distinct challenges and trade-offs in memory
usage, accuracy, and localization capabilities. Oc-
toMap is a widely-used framework that employs an
octree structure to hierarchically subdivide 3D space
into cubic volumes (voxels) until a given minimum
voxel size. It efficiently stores data of empty or oc-
cupied regions while reducing memory usage. How-
ever, its reliance on minimal fixed-resolution voxels
can limit detail in high-resolution areas, affecting map
accuracy. WaveMap introduces wavelet-based encod-
ing (Yguel et al., 2006) for volumetric representation,
enabling multiscale resolution within the same map.
This adaptive approach preserves detail in critical re-
gions while minimizing memory usage, making it
more efficient than OctoMap in handling large, com-
plex environments. Furthermore, the wavelet encod-
ing and reconstruction processes are computationally
less intensive than the reconstruction of a high reso-
lution Octomap. WaveMap enhances localization by
capturing finer details and offering better adaptabil-
ity to environmental changes. Supereight2 uses voxel
block to dynamically allocate memory only to regions
of interest, means the region from empty to occu-
pied space. It achieving efficient memory manage-
ment even at high resolutions. It supports dense map-
ping and real-time updates, making it suitable for dy-
namic urban environments. Supereight2’s dense rep-
resentation supports precise localization, especially in
feature-rich settings. Volumetric methods face chal-
lenges in balancing resolution, memory efficiency,
and real-time performance.
2.2 Feature Based Mapping Approaches
Feature-based mapping methods offer an alternative
approach in autonomous driving, known for their
ability to create compact and computationally effi-
cient maps by extracting key features (e.g., edges,
corners) from the environment offering computa-
tional efficiency and compact map storage. However,
these methods may lose environmental details, mak-
ing them less effective in highly dynamic or feature-
poor environments. Methods like Link3D (Cui et al.,
2024; Cui et al., 2023), FELC-SLAM (Gao et al.,
2024), and GeometrySLAM (Xu et al., 2023) each
offer unique approaches to balance accuracy, mem-
ory usage, and localization capabilities. Link3D em-
phasizes lightweight mapping by connecting geomet-
ric features, such as edges and planes, into a sparse
network. This reduces memory requirements sig-
nificantly and provides efficient localization. How-
ever, the sparse representation may lose critical de-
tails in complex environments, limiting its adaptabil-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
200

ity in dynamic or unstructured scenarios. FELC-
SLAM builds on feature extraction by incorporating
edge and line constraints into the mapping process.
It enhances localization accuracy, particularly in ur-
ban environments where linear features are preva-
lent. While FELC-SLAM achieves a good balance
between map detail and memory usage, it struggles
with real-time performance in highly dynamic areas
due to its reliance on feature stability. GeometryS-
LAM focuses on extracting and tracking geometric
primitives, such as corners and planes, for efficient
mapping and robust localization. Its compact repre-
sentation minimizes memory usage, but challenges
arise in feature-poor areas where insufficient primi-
tives can reduce map quality and localization reliabil-
ity. Feature-based methods are memory-efficient and
provide strong localization capabilities, especially in
structured environments. However, their reliance on
sparse features can limit performance in dynamic or
unstructured settings, requiring careful method selec-
tion for autonomous driving applications.
2.3 Surface Based Mapping Approaches
Surface-based mapping methods are another solution
for environment representation in autonomous driv-
ing, representing environments as continuous surfaces
using mesh or surfel-based approaches. These meth-
ods offer detailed and structured maps but vary in
memory usage, computational demands, and localiza-
tion capabilities. Mesh-based approaches create tri-
angular meshes to represent surfaces and aresuitable
for path planning, though generating and maintaining
them in real-time can be computationally demanding.
Poisson Surface Reconstruction for LiDAR Odome-
try and Mapping known as PUMA (Vizzo et al., 2021)
and SHINE-Mapping (Zhong et al., 2023) focuses
on real-time mesh generation with high accuracy but
faces challenges in computational efficiency and scal-
ability in large environments. ImMesh (Lin et al.,
2023) and Mesh-LOAM (Zhu et al., 2024) improve
upon this by integrating efficient incremental up-
dates and feature-based optimizations, enabling bet-
ter memory management and real-time performance.
SLAMesh (Ruan et al., 2023) combines mesh cre-
ation with SLAM techniques, offering strong local-
ization through loop closure and global optimization
but at the cost of higher memory usage for maintain-
ing global meshes.
Surfel-based approaches use discrete surface ele-
ments (surfels), which stores additional attributes like
normal vectors, to represent environment surfaces.
SuMa (Behley and Stachniss, 2018) and its enhanced
semantic version, SuMa++ (Chen et al., 2019), use
LiDAR data to build dense surfel maps, achieving
precise localization with efficient use of memory.
However, maintaining consistency over large areas
remains a challenge. SP-SLAM incorporates color
features into surfel maps, enhancing localization in
dynamic environments but requiring more computa-
tional resources. DenseSurfelMapping (Wang et al.,
2019) focuses on high-resolution surfel representa-
tion, offering detailed maps and robust localization
but at the expense of increased memory usage. Both
mesh and surfel methods excel in creating accurate
surface maps, with mesh approaches favoring struc-
tured representations for global consistency and surfel
methods emphasizing real-time performance. How-
ever, managing memory and computational demands
is a common challenge, particularly for large-scale or
dynamic environments.
2.4 Point Cloud Based Mapping
Approaches
Point cloud representations, composed of discrete
3D points from LiDAR or cameras, provide high-
resolution geometric data, making them ideal for de-
tailed environmental representation. However, they
require significant storage and processing resources
on large scales. Key methods to create a point cloud
map, such as Iterative Closest Point (ICP), and its
newer, enhanced variants like Generalized Iterative
Closest Point ICP (G-ICP) (Segal et al., 2009; Moon
et al., 2024), Keep It Simple Straightforward Iterative
Closest Point (KISS-ICP) (Vizzo et al., 2023), LOAM
(Zhang and Singh, 2014), and Normal Distributions
Transform (NDT) (Biber and Strasser, 2003; Saarinen
et al., 2013) differ slightly in the map representation
used, memory usage, and suitability for localization,
especially when incorporating downsampling or fea-
ture detection for memory efficiency. G-ICP enhances
alignment precision by combining point-to-point and
point-to-plane metrics, and including covariances
of each point excelling in structured environments.
However, its computational and memory demands are
high due to the search for the nearest neighbors of ev-
ery point before computing covariances (Young et al.,
2021). Downsampling can alleviate memory usage
but may reduce accuracy in feature-rich areas. G-ICP
offers reliable localization because of the additional
information taken into account. KISS-ICP focuses
on incremental point cloud alignment using simple
nearest-neighbor matching, making it computation-
ally efficient and memory-light. While suitable for
real-time tasks, it struggles in complex or noisy en-
vironments. Downsampling helps reduce processing
time but risks losing critical details, affecting local-
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles
201
ization. LOAM separates odometry and mapping, ex-
tracting features such as edges and planes for accurate
alignment. The accuracy in the mapping algorithm
is ensured through feature matching, which also fa-
cilitates fast computation in the odometry algorithm
(Zhang and Singh, 2014). It balances accuracy and
real-time performance, making it ideal for urban sce-
narios, but feature extraction and global map main-
tenance are memory-intensive. Downsampling helps
manage data size, but can weaken feature extraction,
affecting map detail and localization. NDT divides
the space in a grid and represents the collected point
cloud as Gaussian distribution saving only their pa-
rameters, matching distributions instead of individual
points. It is computationally efficient in structured en-
vironments and resilient to noise but has high mem-
ory demands for storing grids and struggles in sparse
or dynamic areas (Pang et al., 2018). Downsampling
reduces memory load, but may compromise grid qual-
ity and alignment accuracy. Downsampling is essen-
tial for managing memory and computational costs
across these methods, but it trades off map resolution
and alignment accuracy. Proper trade-offs between
memory usage and localization robustness are key for
autonomous driving applications. These aspects are
analyzed later in section 4.
3 MAPPING AND
LOCALIZATION FOR
AUTONOMOUS VEHICLES
In robotics Simultaneous Localization and Mapping
(SLAM) is a widely used approach , enabling systems
to navigate unknown environments by simultaneously
building a map and determining their position within
it. SLAM is particularly effective for exploration
tasks, as it dynamically updates maps in real time
to reflect environmental changes. However, SLAM
comes with limitations, including reduced accuracy
during the initial convergence phase and significant
computational demands to maintain real-time perfor-
mance. These challenges make SLAM less suitable
for applications like autonomous driving, where pre-
cise positioning and high-resolution environmental
representation are required from the outset.
In contrast, mapping and localization are decou-
pled processes that address specific challenges inde-
pendently. The map shall be created in a process pre-
vious to the navigation phase, when the localization
take place. This separation allows each process to be
optimized for its unique requirements. Mapping fo-
cuses on creating a static representation of the envi-
Point Cloud
Preprocessing Semantic filtering Mapping
Figure 2: Process of mapping.
Map
Point Cloud
Preprocessing
Localization
Figure 3: Process of localization.
ronment, while localization determines the system’s
position in real time relative to the precomputed map.
Moreover, since the map is not created by the same
vehicle using the same sensors long stability of the
map representation needs to be ensured.
The mapping, as shown in Fig. 2 is typically per-
formed offline, allowing for the use of computation-
ally intensive techniques to achieve high-resolution
results. Point cloud data from LIDAR or cameras
serves as the input, undergoing preprocessing steps
like deskewing to correct distortions in sensor mea-
surements. Additionally, semantic filtering is applied
to remove dynamic elements, such as vehicles, and
retain only static objects like buildings and roads.
This ensures that the generated maps are both ac-
curate and reliable for navigation or simulation pur-
poses. However, due to its offline nature, mapping
lacks adaptability and cannot dynamically update to
reflect changes in the environment.
The localization process, as shown in Fig. 3, on
the other hand, operates in real time and relies on the
precomputed map to determine the system’s precise
position. Point cloud data is preprocessed to ensure
accuracy, and semantic filtering may also be applied
to refine the input further. Localization’s real-time na-
ture is crucial for dynamic tasks in autonomous driv-
ing, where the ability to make decisions quickly and
interact with other traffic participants is essential.
In applications like autonomous vehicles, map-
ping and localization are performed at distinct time
points. Mapping occurs during the predeployment
phase, often utilizing pre-recorded, high-accuracy
GPS data (e.g., RTK) to create detailed maps. Local-
ization is then carried out during operation, relying on
these precomputed maps to provide precise and effi-
cient positioning. This separation eliminates the need
for a convergence phase, ensuring that vehicles know
their position accurately from the outset.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
202

4 EVALUATION OF SLAM
METHODS FOR MAPPING AND
LOCALIZATION APPROACHES
After summarizing the characteristics of map repre-
sentations and their main approaches, their numerical
evaluation is critical for understanding their perfor-
mance and suitability for autonomous driving. In this
study, we perform experiments two of the most sig-
nificative algorithms presented in section 2, namely:
the KISS-ICP, and PUMA SLAM, analyzing their ca-
pabilities on a subset of KITTI benchmark sequences
(Geiger et al., 2012). These algorithms represent a
two of the main SLAM approaches, each with unique
characteristics in terms of algorithm design and out-
put.
Our evaluation focuses on three key metrics: pose
accuracy, registration time during localization, and
relative map size. Accuracy assesses the precision
of localization and the quality of the generated maps.
Registration time measures the computational effi-
ciency of each method, highlighting their suitability
for real-time applications. Map size, in the context
of map accuracy, evaluates how efficiently the meth-
ods encode spatial information, balancing storage re-
quirements with fidelity. By systematically compar-
ing these SLAM packages, we aim to identify their
strengths, limitations, and trade-offs, providing valu-
able insights into their application in mapping and lo-
calization tasks for robotics and autonomous systems.
4.1 Testing Environment
For evaluating the algorithms a testing framework
based on the well-known KITTI dataset of odometry
(Geiger et al., 2012) was chosen. This dataset pro-
vides high-quality point cloud data with preprocess-
ing steps (mentioned in chapter 3) already included,
ensuring a reliable foundation for experimentation.
The processes of mapping and localization are di-
vided in similar way as done in autonomous vehicles
instead of using a SLAM approach. For mapping, we
use the Semantic KITTI (Behley et al., 2019; Behley
et al., 2021) dataset, an extension of the KITTI dataset
enriched with semantic annotations. This enables us
to apply semantic filtering during the mapping pro-
cess, removing dynamic elements such as vehicles
while retaining only static objects to create more ac-
curate and consistent maps. To generate the map,
we leverage the ground truth poses provided by the
KITTI dataset, utilizing an adapted version of the al-
gorithm tailored specifically for this purpose. From
the dataset, we chose 4 random data sequences for the
analysis to include some diversity while keeping the
computation time within limits.
For localization, we use the original KITTI dataset
without additional semantic filtering. This simplifies
the localization pipeline by retaining dynamic objects
in the data while focusing on real-time positioning
relative to the precomputed maps. Using these com-
plementary datasets, we ensure a robust test environ-
ment to assess the performance of the approaches in
addressing the distinct requirements of mapping and
localization.
The experiments are conducted on a system run-
ning Ubuntu 22.04 within Windows Subsystem for
Linux (WSL) on a Windows 11 host. The hardware
setup features an AMD Ryzen 7 5700G processor and
32 GB of RAM, providing sufficient computational
resources to handle large point cloud datasets. In the
next subsections the results for each of the algorithms
are presented.
4.2 Point Cloud Based Mapping
In this evaluation, we assess the performance of Point
Cloud Map by using KISS-ICP (Vizzo et al., 2023) on
selected KITTI benchmark sequences to understand
its effectiveness in mapping and localization tasks.
The evaluation is conducted using the default config-
uration by adapting the maximum number of threads
to 8 and increase the maximum number of iterations
to 1,000 to improve convergence accuracy during the
scan alignment process, particularly in complex envi-
ronments. The voxel size is adjusted in accordance
with the map voxelization, ensuring consistency. An
impression of the wide range of voxel sizes and the
resulting point cloud maps is shown in Fig. 4, with
the zoomed scene below. The larger the voxel, the
fewer points are used to represent the map, resulting
in a lighter color.
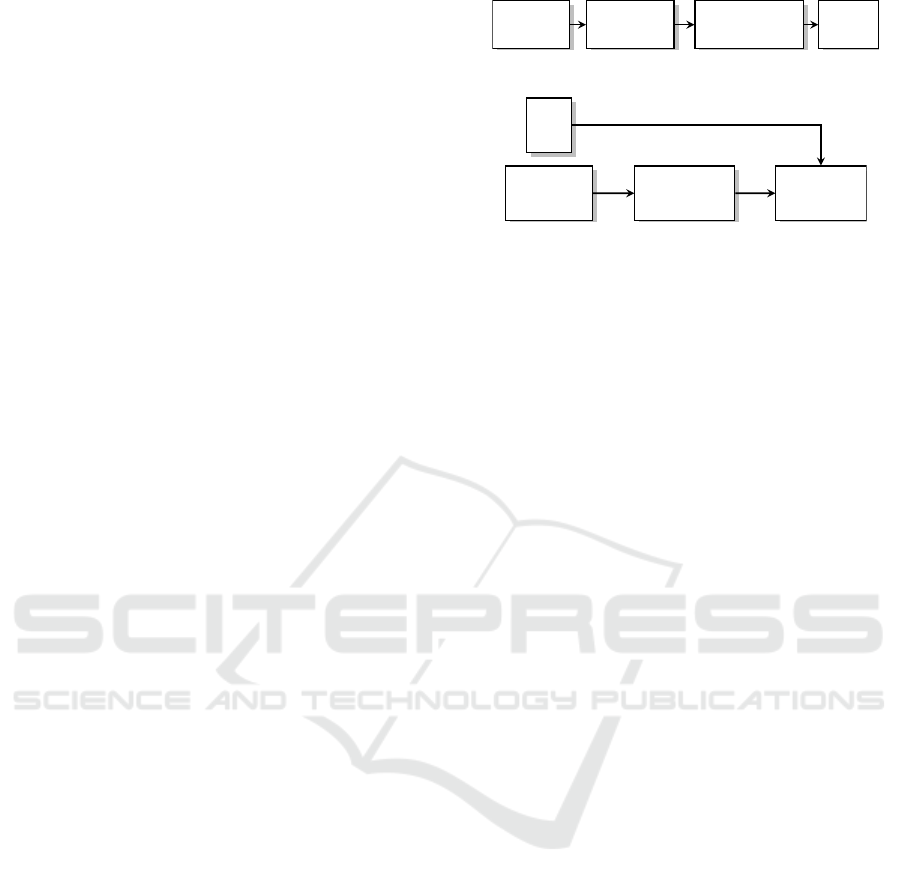
Figure 4: Point cloud map of sequence 03 at different voxel
sizes; from left to right [3 cm, 10 cm, 25 cm, 100 cm].
Figure 5 presents the localization accuracy results,
including absolute and relative translational errors
(difference between the estimated and actual move-
ment of the vehicle between two points in time), as
well as absolute and relative rotational errors (angu-
lar difference). These metrics are computed using
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles
203
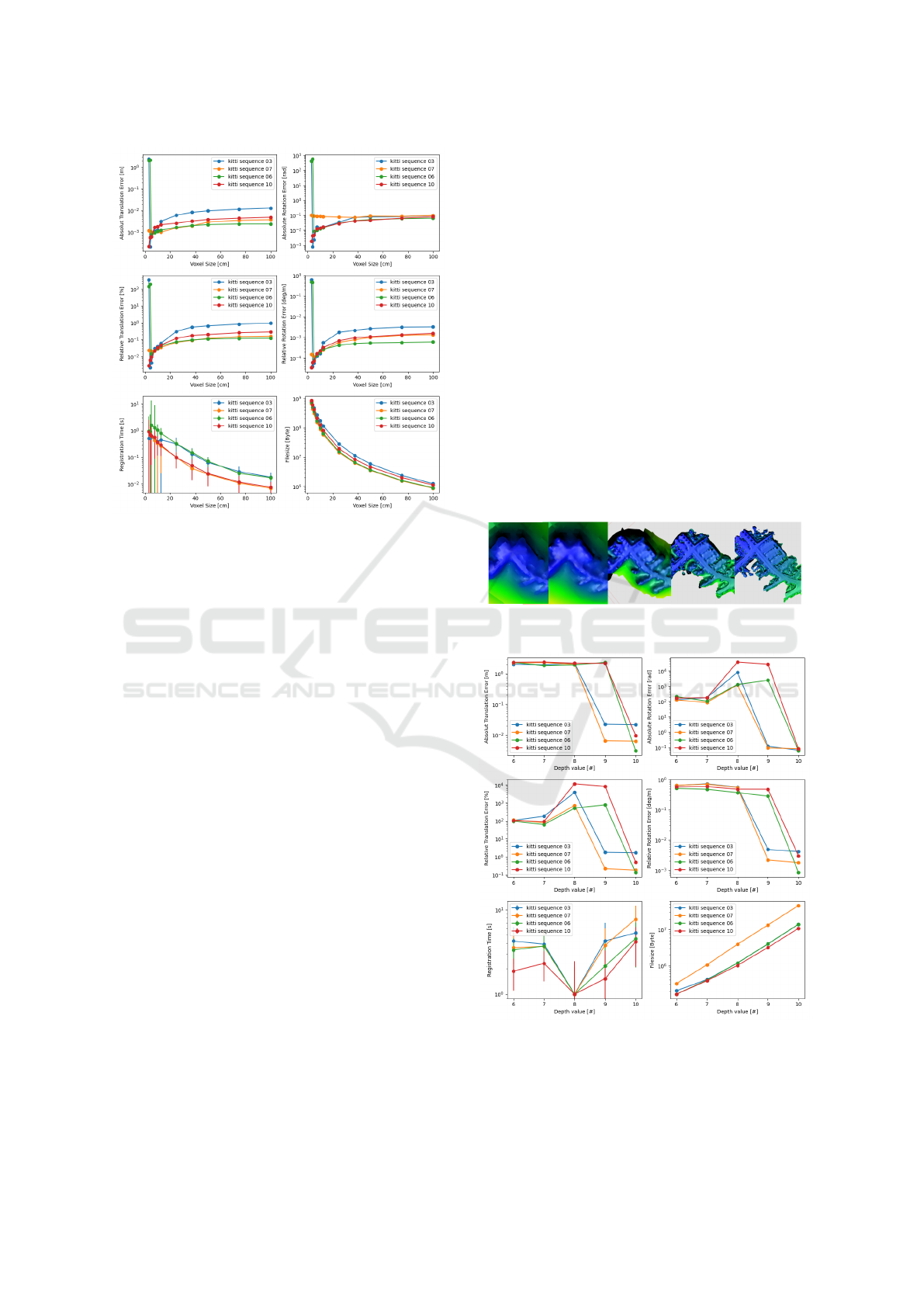
Figure 5: Results of KISS-ICP.
the KISS-ICP evaluation framework, which closely
aligns with the metrics employed in the KITTI odom-
etry benchmark. In the lower part of the figure the
registration time and the file size of the map are de-
picted. Registration time is the time that the algorithm
needs for calculate the correspondences (registration)
between the sensor data and the map.
In general, it can be said that the accuracy im-
proves as the voxel size decreases, at least up to
a sequence-specific threshold where the process be-
comes unstable. Beyond this point, finer voxel grids
result in a significant decline in accuracy, producing
poor outcomes. This behavior is also evident in the
figures presented in the appendix and the trajectory
plots of the sequences, where unstable attempts ex-
hibit oscillations and diverge completely from the in-
tended path. The threshold at which instability oc-
curs appears to be dependent on the specific map or
sequence. Some sequences remain stable with voxel
sizes as small as 3 cm—the lower limit of this inves-
tigation—while others shows instability at voxel size
of 3 and 4 cm.
Overall, the results demonstrate that good accu-
racy can still be achieved even at lower resolutions of
the point cloud map, e.g. a translation error below
1 cm is achievable for voxel sizes of 50 cm. As ex-
pected, computation times and map sizes increase as
the voxel size decreases. Between the lowest resolu-
tion tested (100 cm voxel size) and the highest reso-
lution (3 cm voxel size), processing time increases by
approximately 100 times. Similarly, map size shows
a rapid exponential growth with increasing resolu-
tion, underscoring the trade-off between finer detail
for higher accuracy and computational and storage
demands.
4.3 Surface Based Mapping
The second approach we explore is the PUMA al-
gorithm (Vizzo et al., 2021) for mapping and local-
ization tasks. By leveraging the default properties of
the PUMA package, we adapted a SLAM (Simultane-
ous Localization and Mapping) approach to the previ-
ously proposed mapping and localization framework.
A notable aspect of this adaptation involves con-
trolling the map resolution. This is accomplished by
adjusting the depth parameter of the PUMA algo-
rithm, which controls the granularity of the mesh and,
consequently, the resolution of the map, as can seen
in Fig. 6. This allows for the representation of the
environment at varying levels of detail, ranging from
coarser to finer meshes.
Figure 6: Mesh Map of sequence 03 at different depth val-
ues; from left to right [6, 7, 8, 9, 10].
Figure 7: Results of PUMA.
Figure 7 highlights the performance characteris-
tics of the PUMA algorithm under varying depth val-
ues. Notably, all sequences are successfully resolved
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
204

only when the depth value reaches 10, although some
sequences are also solvable with a depth value of 9,
as further illustrated in the trajectory plots provided
in the appendix. The computation time varies signifi-
cantly, ranging between 1 and 10 seconds. At a depth
value of 8, the computation time unexpectedly drops
to around 1 second for all sequences. However, this is
accompanied by an increase in both the relative trans-
lation error and the absolute rotation error. Combined
with the trajectory plots in the appendix, this suggests
that the localization process fails from the very first
iteration. The underlying cause of this consistent be-
havior across all sequences at the same depth value
remains unclear and warrants further investigation.
The file size increases exponentially with the
depth value, reaching 10 MB to 50 MB at a depth
value of 10, depending on the sequence length. In
terms of accuracy, the overall absolute translation er-
ror achieves a minimum value below 3 cm the depth
value of 10 for all sequences. Further parameter op-
timization may help reduce these errors, potentially
enhancing both accuracy and efficiency.
4.4 Comparison of the Approaches
When comparing the two methods based on the cho-
sen metrics—accuracy, registration time, and map
size—the point cloud representation with KISS-ICP
clearly stands out. It achieves the highest accuracy,
reaching theoretically sub-millimeter levels, and sig-
nificantly smaller file sizes relative to the achieved ac-
curacy. For instance, achieving centimeter-level ac-
curacy with PUMA requires a file size of 10 to 50
MB, depending on the sequence, whereas a similar
level of accuracy with the point-cloud representation
can be achieved with file sizes below 7 MB. Regis-
tration time defines the real-time position availability
too. KISS-ICP demonstrates the fastest registration
times, approximately 10 milliseconds for large voxel
sizes, highlighting its potential for real-world appli-
cations. Additionally, the PUMA localization seems
to be more unstable compared to the point cloud lo-
calization, the frequent divergence of some of the se-
quences depending on the depth value demonstrates
the susceptibility of localization stability to the se-
lected parameters.
Despite these differences, mesh maps offer an
advantage in their inherent topography information,
which facilitates path planning by enabling collision-
free navigation. In contrast, unstructured point cloud
maps lack this built-in topographical data, making
collision-free path planning more challenging in re-
spect of computational effort.
5 CONCLUSIONS
The analysis of the characteristics of different envi-
ronment representations: point clouds, surface-based
models such as meshes and surfels, volumetric maps,
and feature-based maps bring us to the conclusion that
although SLAM approaches are suitable for robotics
applications they require some adaptions for dividing
localization and mapping as required in autonomous
vehicles.
Our comparative numerical analysis of adapted
SLAM approaches demonstrated that point cloud-
based mapping using KISS-ICP offers significant ad-
vantages over mesh-based methods. Specifically, the
point cloud approach excelled in terms of accuracy,
computational efficiency, stability, and reduced map
size. These findings highlight the suitability of point
clouds for scenarios that demand high precision and
real-time performance, such as autonomous driving.
Looking to the future, there is considerable poten-
tial for further advancements in this field. Expanding
the analysis to include other representation methods,
such as feature-based and volumetric maps, could
provide a more comprehensive understanding of the
algorithms and allow a efficient evaluation of their
use-cases. Extending the evaluation to include other
datasets and exploring alternative alignment (registra-
tion) algorithms will further enhance the understand-
ing of the trade-offs between these approaches and
make possible to build more robust algorithms for au-
tonomous driving.
ACKNOWLEDGEMENTS
The project ‘DEKOR-X’ is part of the ‘Flagship Ini-
tiative for Autonomous and Connected Driving’ of
the German Association of the Automotive Industry
(VDA) and is being funded by the German Federal
Ministry for Economic Affairs and Climate Action
(BMWK). We sincerely thank all project partners and
contributors for their valuable support and collabora-
tion throughout this research.
REFERENCES
Bao, Z., Hossain, S., Lang, H., and Lin, X. (2023). A re-
view of high-definition map creation methods for au-
tonomous driving. Engineering Applications of Artifi-
cial Intelligence, 122:106125.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Gall, J., and Stachniss, C. (2021). Towards 3D
LiDAR-based semantic scene understanding of 3D
point cloud sequences: The SemanticKITTI Dataset.
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles
205

The International Journal of Robotics Research, 40(8-
9):959–967.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A Dataset for Semantic Scene Understanding of Li-
DAR Sequences. Version Number: 3.
Behley, J. and Stachniss, C. (2018). Efficient Surfel-Based
SLAM using 3D Laser Range Data in Urban Envi-
ronments. In Robotics: Science and Systems XIV.
Robotics: Science and Systems Foundation.
Biber, P. and Strasser, W. (2003). The normal distributions
transform: a new approach to laser scan matching.
In Proceedings 2003 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS 2003)
(Cat. No.03CH37453), volume 3, pages 2743–2748,
Las Vegas, Nevada, USA. IEEE.
Chen, X., Milioto, A., Palazzolo, E., Giguere, P., Behley, J.,
and Stachniss, C. (2019). SuMa++: Efficient LiDAR-
based Semantic SLAM. In 2019 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 4530–4537, Macau, China. IEEE.
Cui, Y., Chen, X., Zhang, Y., Dong, J., Wu, Q., and Zhu, F.
(2023). BoW3D: Bag of Words for Real-Time Loop
Closing in 3D LiDAR SLAM. IEEE Robotics and
Automation Letters, 8(5):2828–2835.
Cui, Y., Zhang, Y., Dong, J., Sun, H., Chen, X., and Zhu,
F. (2024). LinK3D: Linear Keypoints Representation
for 3D LiDAR Point Cloud. IEEE Robotics and Au-
tomation Letters, 9(3):2128–2135.
Dai, Y., Wu, J., and Wang, D. (2023). A review of com-
mon techniques for visual simultaneous localization
and mapping. Journal of Robotics, 2023(1):8872822.
Debeunne, C. and Vivet, D. (2020). A review of visual-lidar
fusion based simultaneous localization and mapping.
Sensors, 20(7):2068.
Funk, N., Tarrio, J., Papatheodorou, S., Popovi
´
c, M., Al-
cantarilla, P. F., and Leutenegger, S. (2021). Multi-
resolution 3D mapping with explicit free space rep-
resentation for fast and accurate mobile robot mo-
tion planning. IEEE Robotics and Automation Letters,
6(2):3553–3560.
Gao, R., Li, Y., Li, B., and Li, G. (2024). FELC-SLAM:
feature extraction and loop closure optimized lidar
SLAM system. Measurement Science and Technol-
ogy, 35(11):115112.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? The KITTI vision bench-
mark suite. In 2012 IEEE Conference on Computer
Vision and Pattern Recognition, pages 3354–3361,
Providence, RI. IEEE.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2013). OctoMap: an efficient proba-
bilistic 3D mapping framework based on octrees. Au-
tonomous Robots, 34(3):189–206.
Lin, J., Yuan, C., Cai, Y., Li, H., Ren, Y., Zou, Y., Hong,
X., and Zhang, F. (2023). ImMesh: An Immediate
LiDAR Localization and Meshing Framework. IEEE
Transactions on Robotics, 39(6):4312–4331.
Moon, Y., Hong, J., Park, C., and Han, S. (2024).
Faster GICP with Voxel-Based Computation: Dy-
namic voxel size refinement for Enhanced Accuracy.
In 2024 24th International Conference on Control,
Automation and Systems (ICCAS), pages 493–498,
Jeju, Korea, Republic of. IEEE.
Pang, S., Kent, D., Cai, X., Al-Qassab, H., Morris, D., and
Radha, H. (2018). 3d scan registration based local-
ization for autonomous vehicles - a comparison of ndt
and icp under realistic conditions. In 2018 IEEE 88th
Vehicular Technology Conference (VTC-Fall), pages
1–5.
Pomerleau, F., Colas, F., Siegwart, R., et al. (2015). A
review of point cloud registration algorithms for mo-
bile robotics. Foundations and Trends® in Robotics,
4(1):1–104.
Reijgwart, V., Cadena, C., Siegwart, R., and Ott, L. (2023).
Efficient volumetric mapping of multi-scale environ-
ments using wavelet-based compression. In Robotics:
Science and Systems XIX. Robotics: Science and Sys-
tems Foundation.
Ruan, J., Li, B., Wang, Y., and Sun, Y. (2023). SLAMesh:
Real-time LiDAR Simultaneous Localization and
Meshing. In 2023 IEEE International Conference on
Robotics and Automation (ICRA), pages 3546–3552,
London, United Kingdom. IEEE.
Saarinen, J., Andreasson, H., Stoyanov, T., Ala-Luhtala, J.,
and Lilienthal, A. J. (2013). Normal Distributions
Transform Occupancy Maps: Application to large-
scale online 3D mapping. In 2013 IEEE International
Conference on Robotics and Automation, pages 2233–
2238, Karlsruhe, Germany. IEEE.
Schreier, M., Willert, V., and Adamy, J. (2015). Com-
pact representation of dynamic driving environments
for adas by parametric free space and dynamic object
maps. IEEE Transactions on Intelligent Transporta-
tion Systems, 17(2):367–384.
Segal, A., Haehnel, D., and Thrun, S. (2009). Generalized-
ICP. In Robotics: Science and Systems V. Robotics:
Science and Systems Foundation.
Vespa, E., Funk, N., Kelly, P. H. J., and Leutenegger, S.
(2019). Adaptive-resolution octree-based volumetric
SLAM. In International Conference on 3D Vision
(3DV), pages 654–662.
Vespa, E., Nikolov, N., Grimm, M., Nardi, L., Kelly, P. H. J.,
and Leutenegger, S. (2018). Efficient Octree-Based
Volumetric SLAM Supporting Signed-Distance and
Occupancy Mapping. IEEE Robotics and Automation
Letters, 3(2):1144–1151.
Vizzo, I., Chen, X., Chebrolu, N., Behley, J., and Stach-
niss, C. (2021). Poisson Surface Reconstruction for
LiDAR Odometry and Mapping. In 2021 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 5624–5630, Xi’an, China. IEEE.
Vizzo, I., Guadagnino, T., Mersch, B., Wiesmann, L.,
Behley, J., and Stachniss, C. (2023). KISS-ICP: In De-
fense of Point-to-Point ICP – Simple, Accurate, and
Robust Registration If Done the Right Way. IEEE
Robotics and Automation Letters, 8(2):1029–1036.
Wang, K., Gao, F., and Shen, S. (2019). Real-time Scalable
Dense Surfel Mapping. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
6919–6925, Montreal, QC, Canada. IEEE.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
206

Wurm, K. M., Hornung, A., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2010). OctoMap: A Probabilistic,
Flexible, and Compact 3D Map Representation for
Robotic Systems. In Proc. of the ICRA 2010 work-
shop on best practice in 3D perception and modeling
for mobile manipulation, volume 2, page 3.
Xu, M., Lin, S., Wang, J., and Chen, Z. (2023). A LiDAR
SLAM System With Geometry Feature Group-Based
Stable Feature Selection and Three-Stage Loop Clo-
sure Optimization. IEEE Transactions on Instrumen-
tation and Measurement, 72:1–10.
Yguel, M., Aycard, O., and Laugier, C. (2006). Wavelet Oc-
cupancy Grids: A Method for Compact Map Building.
In Corke, P. and Sukkariah, S., editors, Field and Ser-
vice Robotics, volume 25, pages 219–230. Springer
Berlin Heidelberg. Series Title: Springer Tracts in
Advanced Robotics.
Young, M., Pretty, C., McCulloch, J., and Green, R. (2021).
Sparse point cloud registration and aggregation with
mesh-based generalized iterative closest point. Jour-
nal of Field Robotics, 38(8):1078–1091.
Zhang, J. and Singh, S. (2014). LOAM: Lidar Odometry
and Mapping in Real-time. In Robotics: Science and
Systems X. Robotics: Science and Systems Founda-
tion.
Zhong, X., Pan, Y., Behley, J., and Stachniss, C. (2023).
SHINE-Mapping: Large-Scale 3D Mapping Using
Sparse Hierarchical Implicit Neural Representations.
arXiv:2210.02299 [cs].
Zhu, Y., Zheng, X., and Zhu, J. (2024). Mesh-LOAM: Real-
Time Mesh-Based LiDAR Odometry and Mapping.
IEEE Transactions on Intelligent Vehicles, pages 1–
12.
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles
207
APPENDIX
Point Cloud Based Mapping
This section shows the trajectories of different voxel
sizes by the subset of KiTTi sequneces.
Figure 8: Trajectory for sequence 03 estimated using KISS-
ICP, the vehicle moves from 0.0 to 480,200. The localiza-
tion diverges for a voxel sizes of 3 cm.
Figure 9: Trajectory for sequence 06 estimated using KISS-
ICP, the vehicle moves in a loop from 0.0 to -3,300. The
localization diverges below a voxel size 4cm.
Figure 10: Trajectory for sequence 07 estimated using
KISS-ICP, the vehicle moves in a loop from 0.0 to -5,10.
Figure 11: Trajectory for sequence 10 estimated using
KISS-ICP, the vehicle moves in a loop from 0.0 to 550,-
10.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
208
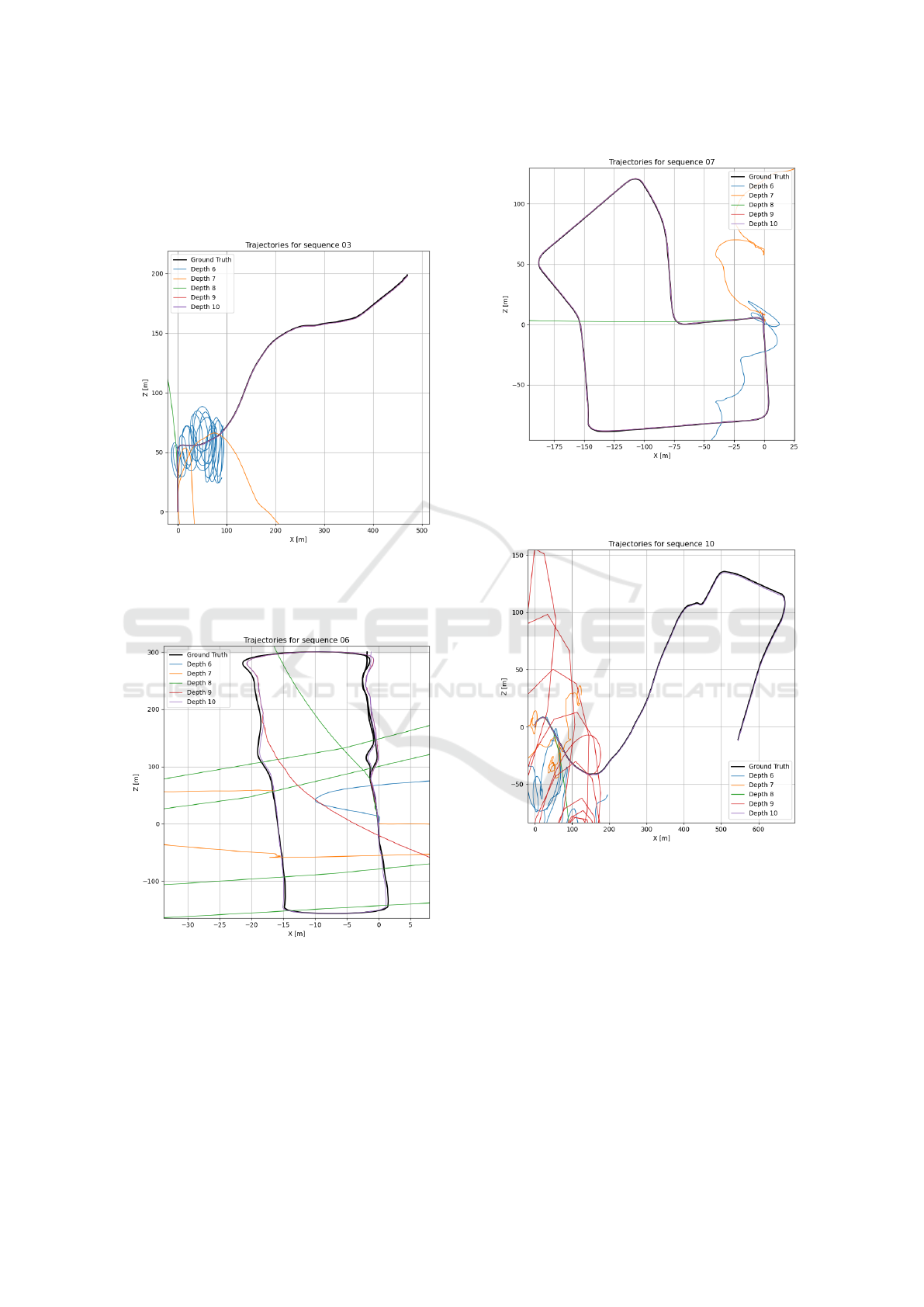
Mesh Based Mapping
This section shows the trajectories of different depth
values by the subset of KiTTi sequneces.
Figure 12: Trajectory for sequence 03 estimated using
PUMA, the vehicle moves from 0.0 to 480,200. The lo-
calization diverges for a depth values of [6, 7, 8].
Figure 13: Trajectory for sequence 06 estimated using
PUMA, the vehicle moves in a loop from 0.0 to -3,300. The
localization diverges for a depth values of [6, 7, 8, 9].
Figure 14: Trajectory for sequence 07 estimated using
PUMA, the vehicle moves in a loop from 0.0 to -5,10. The
localization diverges for a depth values of [6, 7, 8].
Figure 15: Trajectory for sequence 10 estimated using
PUMA, the vehicle moves in a loop from 0.0 to 550,-10.
The localization diverges for a depth values of [6, 7, 8, 9].
Comparison of Point Cloud and Surface Based Mapping for Autonomous Vehicles
209
