
A Greedy Dynamic Task Offloading and Service Management in V2V
Networks
Hanyang Xing
a
Institute of Communication Engineering, University of Electronic Science and Technology of China,
2006 Xiyuan Avenue, High-tech Zone (West), Chengdu, China
Keywords: Vehicle-to-Vehicle Communication, Knapsack Algorithm, Game Theory, Decision Tree.
Abstract: This paper introduces an advanced framework for optimizing task offloading and service caching in Vehicle-
to-Vehicle (V2V) communication networks. The proposed approach leverages a greedy algorithm to address
key challenges such as offloading latency, energy consumption, and system overhead. By incorporating
practical factors such as task size, server storage capacity, and task popularity, the framework efficiently
allocates tasks, thereby reducing computational delays and enhancing network performance. The
effectiveness of the algorithm is validated through comprehensive simulations that demonstrate significant
improvements in both time efficiency and resource utilization compared to existing methodologies. The
results underscore the potential for future advancements in V2V networks, particularly in enhancing network
stability under high-speed conditions and developing robust communication systems that maximize the use
of roadside computational resources.
1 INTRODUCTION
The computational demands for information
transmission are rapidly increasing with the
proliferation of the Internet of Things (IoT). While the
existing cloud server infrastructure remains an
efficient and cost-effective solution for handling most
user requests, the growing number of local devices
with stringent computational needs—including
augmented reality, virtual reality, autonomous
vehicles, and vehicle communication—has created
new challenges. These applications require ultra-
reliable and low-latency communications (URLLC) to
ensure low latency, reduced power consumption, and
adequate computational resources without
compromising performance (Zeng, Zhang, Wang, Liu,
Wang, 2020). In this context, Mobile Edge Computing
(MEC) is becoming a critical component of modern
networks, serving as a distributed computational
infrastructure embedded within hosts (He, Li, Chen,
Wang, 2019). Tasks can be offloaded to these edge
servers, a process known as Mobile Edge Computing
Offloading (MECO) (He et al, 2019), allowing highly
demanding tasks to be processed and subsequently
downloaded to local devices.
a
https://orcid.org/0009-0008-5534-0930
However, current URLLC devices and services
face several significant challenges. Firstly, many
communication networks are burdened with a
substantial number of computation-intensive tasks,
which strains the computational capacity of nodes or
hosts. This strain, coupled with the network's
intermittent availability, can result in inaccurate
communication processes (Zeng et al, 2020).
Secondly, the network often operates near full
capacity, making immediate transmission and
processing of data nearly impossible due to
congestion (Zeng et al, 2020; He et al, 2019). Thirdly,
although the existing capacity allocation algorithms
within MEC networks are sophisticated, they fall
short in accounting for long-term effectiveness,
leading to suboptimal resource allocation over
extended periods (He et al, 2019).
Vehicle-to-vehicle (V2V) communication, which
is crucial for the advancement of driverless vehicles
and the improvement of traffic conditions, is
particularly affected by these challenges. V2V
communication requires stable connections between
vehicles, which function as both hosts and nodes
while in motion (Liu, Wang Chen, Bensaou 2021).
Current vehicular ad hoc networks rely on cellular
Xing, H.
A Greedy Dynamic Task Offloading and Service Management in V2V Networks.
DOI: 10.5220/0013474100003941
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 653-659
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
653

networks for direct data transfer. However, this
approach is limited, often leading to inefficiencies
and wasted computational resources within the
network (Pachat, Chen, Chen, 2020).
To address these challenges and integrate mobile
edge networks into vehicular systems, our research
proposes a robust framework for task offloading and
service caching within both edge and cloud networks.
This framework is designed to reduce latency and
energy consumption, thereby minimizing time delays
and resource demands during information
transmission. Based on computational capabilities,
data packets will dynamically choose the most
optimal processing route—whether locally, at the
edge server, or within the cloud—correlating
computational power with transmission time. The
proposed framework incorporates a non-cooperative
game theory-based algorithm to efficiently distribute
packets across various endpoints. Additionally,
considering the limited energy resources at the edge
servers, the framework leverages a 0-1 knapsack
algorithm to refine the initial selection process,
implementing dynamic service caching based on task
popularity (i.e., frequency of service requests) to
ensure that the endpoint can handle the required data
volume. The final offloading decision is derived from
a comprehensive analysis of both service caching and
the original selection.
1.1 Accessibility
Vehicle-to-Vehicle (V2V) communication is a form
of Mobile Edge Computing (MEC) that leverages
resources from vehicles and roadside infrastructure to
collect and disseminate traffic information, thereby
supporting self-driving vehicles and enhancing traffic
conditions. Currently, V2V communication demands
low latency and energy-efficient transmission, but
existing algorithms struggle to fully meet these
requirements. However, through the optimization and
refinement of these algorithms, V2V communication
can be made faster and more energy-efficient.
To improve the accessibility of V2V
communication, task offloading should be prioritized
based on the popularity or importance of the tasks,
ensuring a more rational processing by the algorithm.
Additionally, the algorithm must operate within
reasonable computational requirements to reduce
processing time and further minimize latency.
1.2 Inserting V2V Concepts
V2V communication, short for Vehicle-to-Vehicle
communication, is a subset of Mobile Edge
Computing (MEC) that offers an alternative to
Mobile Cloud Communication (MCC). An MEC
system comprises not only a cloud center but also
various edge devices, such as base stations and
mobile phones. Tasks requiring computation are
partitioned, with some processed locally while others,
particularly those that are computation-intensive, are
offloaded to MEC servers or cloud servers to utilize
higher computational power. Key factors in
determining the optimal task partitioning include the
offloading ratio, CPU-cycle frequency, and
transmission power. This approach results in lower
latency, reduced energy consumption, and shorter
transmission distances. Consequently, the system is
transformed into an information-centric architecture
capable of partitioning and offloading tasks more
efficiently, rather than rigidly transferring all tasks
from one end to another.
2 RELATED WORK
Vehicle-to-Vehicle (V2V) communication
addressing specific traffic issues has been extensively
studied in various contexts. Dey et al. explored
wireless communication within a heterogeneous
network (Het-Net) environment, utilizing Wi-Fi,
DSRC, and LTE for the transmission of accident
information between vehicles. Their research
demonstrated that this system effectively reduces the
dependency on infrastructure communication and
establishes a stable connection between rapidly
moving vehicles (Dey, Ding, Zheng, 2016). Navas et
al. developed a device equipped with an adaptive
cruise control (ACC) system that can be easily
installed on vehicles to mitigate poor traffic
conditions (Navas, Milanés, 2019). Notably, this
device remains effective even when preceding
vehicles are not equipped with it, enhancing its
acceptability and widespread adop8tion (Navas et al,
2019).
In 2017, Perfecto et al. proposed a framework for
beam alignment in millimeter-wave V2V networks,
which improves millimeter-wave communication by
addressing issues related to directionality, blockage,
and alignment delay (Perfecto, Del Ser, Bennis 2017).
This framework has proven effective under complex
conditions in high-density, multi-lane highway
scenarios (Perfecto et al, 2017). Ahmad et al.
recommended a validation method for congestion
control and performance in V2V systems through
vehicle-level testing, which enables congestion
detection within a 1.5-meter range and achieves a
transmission latency of 600ms (Ahmad,
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
654

Bakhshizadeh, Yilmaz, 2019). Bian et al. introduced
a linear feedback controller designed to reduce time
headway in V2V communication under various
conditions. Their approach includes a novel definition
of the inter-vehicle distance, which helps prevent
undesirable intermittent fluctuations in distance
detection (Bian, Wu, Zheng 2019). By increasing the
number of predecessors, their method ensures internal
asymptotic stability and meets string stability
requirements (Bian et al, 2019). Gao et al. proposed
an enhanced GPSR-based wireless routing scheme
that incorporates newly introduced parameters, such
as a prediction mechanism and computed weights, to
improve wireless communication stability (Gao,
Zhao, Yin, 2021). Their approach demonstrated
superior performance in terms of packet delivery
ratio, wireless hops, and time delay (Gao et al, 2021).
Bazzi et al. conducted a comparison between the
IEEE 802.11 standard and the proposed V2V
communication network, revealing that the proposed
network outperforms IEEE 802.11 in terms of
maximum awareness range and vehicle density, given
identical inputs and external conditions (Bazzi,
Wong, 2017).
3 ALGORITHMS
In this part, it shows the part of original code of the
purposed algorithm. The principle of this part of code
illustrates how the decision is made based on the task
size and capacity requirement. In Q1, it is a 2-
dimensional array which contains size and capacity
requirement information about the task.
In this section, we present a segment of the
original code implementing the proposed algorithm.
This code illustrates the core decision-making
mechanism, which is based on the task size and the
corresponding capacity requirements. The algorithm
operates on a two-dimensional array, denoted as Q1,
which encapsulates the size and capacity
requirements of the tasks. The iterative nature of the
algorithm allows for dynamic adjustments to be made
as tasks are processed.
To evaluate the proposed framework, we consider
a V2V communication system comprising vehicles
and roadside edge servers. Vehicles are assumed to
move at varying speeds with densities ranging from
sparse rural areas to dense urban environments. In this
model, each vehicle generates tasks with specific
computational requirements, including CPU cycles
and storage needs. Edge servers are equipped limited
storage and processing capacities which influencing
task offloading decisions. Moreover, we built a traffic
model simulates real-world scenarios where vehicles
dynamically interact with edge servers, enabling
comprehensive analysis of system performance.
Our proposed algorithm incorporates three main
modules: Task Offloading, Dynamic Service
Caching, and Adjustment of Task Offloading. These
modules work together to optimize computational
resource utilization. The algorithm begins by
evaluating task size and capacity requirements
through a two-dimensional array. Probabilities are
calculated to determine task selection, and a random
selection mechanism ensures balanced resource
allocation.
As Algorithm 1 shown, this algorithm begins by
resetting the two-dimensional array Q1 through the
Restart function, ensuring that all task-related data is
cleared before processing. The main decision-making
process occurs in the UpdateAction1 function, where
tasks are evaluated based on their size and capacity
requirements stored in Q1.
Probabilities are calculated to determine which
tasks are likely to be selected for execution, and a
random selection mechanism is employed to choose
the next task, ensuring a balanced distribution of
computational resources. This approach enables the
algorithm to adapt dynamically to varying task
demands, optimizing performance in a V2V
communication environment.
Data: task size and capacity requirements
Result: how to select the next task;
while not iterate over all the tasks do
read the task index;
if the loaded task is not current task then
calculate the resource ratio;
compute the probability for task selection
update the probability list
else
select a new task
end
end
Algorithm 1: How to select a new task
4 METHODOLOGY
This section outlines the methodology of the
proposed framework, including the algorithm's
processing flow and structure, which encompasses:
1. Task Offloading: Using non-cooperative
game theory to minimize latency.
2. Dynamic Service Caching: Employing the
0-1 knapsack algorithm to cache tasks based
on popularity and storage capacity.
A Greedy Dynamic Task Offloading and Service Management in V2V Networks
655
3. Adjustment of Task Offloading: Refining
initial decisions to optimize resource
utilization.
4.1 Algorithm Process
The principles and procedures of the framework are
briefly introduced below with corresponding
diagrams: The process begins with tasks that are
candidates for offloading to an edge server. The IoT
device first identifies and confirms the edge server
before initiating task transmission. Upon receiving
the notification, the edge server evaluates the service
request based on its frequency of occurrence. A
higher frequency increases the likelihood that the task
will be offloaded to that particular edge server. The
edge server then downloads services from the cloud
server to cache them, considering both the popularity
of the services and the storage limitations of the edge
server. If the requested service for a task is already
cached in the edge server, the task can be offloaded
to it. Otherwise, the task will need to be offloaded to
another endpoint.
4.2 Algorithm Structure
The algorithm first identifies the optimal terminal for
task offloading and then caches the task accordingly.
The objective is to minimize energy consumption
while maximizing task popularity, using the 0-1
knapsack algorithm and incorporating game theory.
Based on these factors, the algorithm provides the
most effective strategy for task offloading.
4.2.1 Algorithm Explanation
In this algorithm, five IoT devices are assumed to
handle local processing. Additionally, both edge
servers and cloud servers are available for task
offloading. The values 0, 1, and -1 represent local
processing, edge server processing, and cloud server
processing, respectively, for each task.
The algorithm is composed of three main modules:
Task Offloading, Dynamic Service Caching, and
Adjustment of Task Offloading. The Task Offloading
module employs a non-cooperative game theory
approach to make initial task offloading decisions,
aiming to minimize system overhead. The Dynamic
Service Caching module uses the 0-1 knapsack
algorithm to maximize the popularity of task-
requested services by implementing dynamic service
caching in edge servers. Finally, the Adjustment of
Task Offloading module fine-tunes the initial
offloading decisions based on the caching outcomes at
the edge server.
The following algorithms are used for
comparative experiments:
• The TOCS algorithm, which
comprehensively addresses task offloading
and service caching within a mobile edge
computing network without relying on cloud
server assistance.
• The TO algorithm, which focuses solely on
the offloading problem within a mobile edge
computing network.
• The LP algorithm, where all tasks are
processed on local IoT devices.
5 EXPERIMENT
This section presents two experiments designed to
validate the algorithm under different conditions and
scenarios. It begins with an introduction to the
parameters and key components of the algorithm and
the experimental setup. Following this, the specific
steps of the experiments are detailed, along with an
analysis of the results.
Two experiments were conducted to evaluate the
proposed framework under different conditions. Key
parameters include CPU capacity, task size, and
server storage. The experiments simulate task
generation and offloading in both sparse and dense
traffic scenarios.
5.1 Experiment Introduction
This subsection describes two experiments conducted
under varying conditions, along with the primary
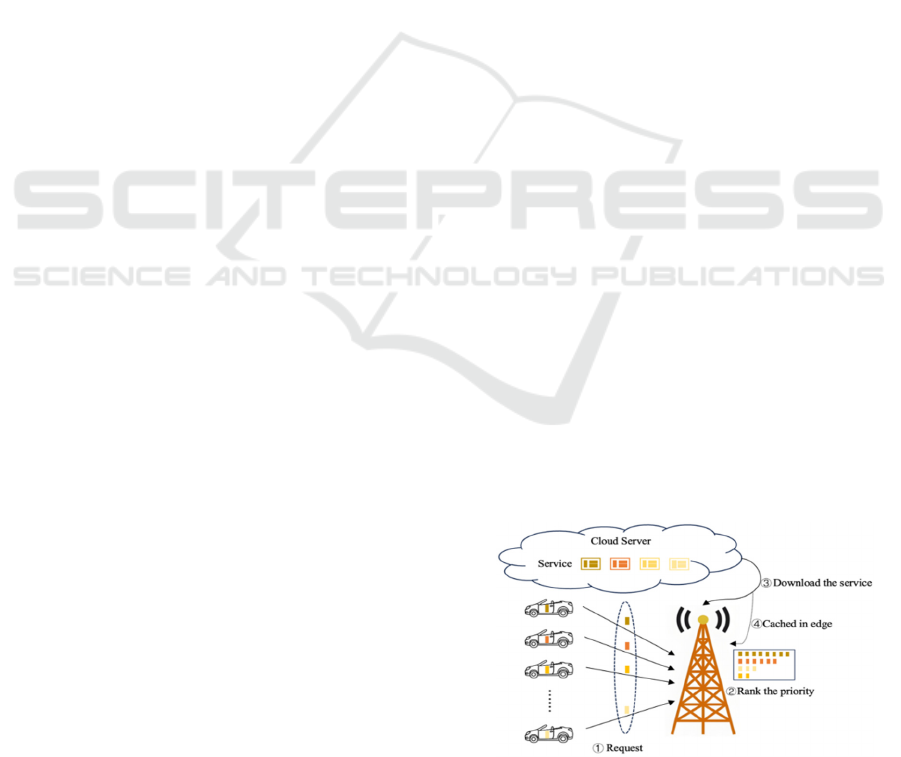
results. Figure 1 illustrates the algorithm's flowchart
and provides an overview of the experimental
procedure. Initially, devices and vehicles request
services from nearby edge servers, such as base
stations. These tasks are subsequently aggregated
Figure 1: Flowchart of the Algorithm.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
656
at the base station, where they are ranked based on
their popularity, size, and the storage capacity of the
base station. The algorithm subsequently generates a
decision based on this ranking. The appropriate
services are then downloaded from the cloud server
and processed on different hosts, ensuring that tasks
are executed where energy consumption and
processing time are minimized.
The parameters used in the experiments are listed
in Table 1 below. Each parameter plays a critical role
in influencing task offloading latency. For example,
the Task CPU parameter affects the processing time
and directly impacts the task offloading decision,
especially since the edge server may not provide
sufficient computational capacity for certain tasks.
The Task Size parameter indicates the storage
requirement for hosting the task. Task Popularity
reflects the importance of each task, determining
which tasks should be prioritized in the scheduling
process.
Table 1: Factors to select the best server of task.
Factor Name Definition
Task CPU Re
q
uired CPU ca
p
acit
y
for tas
k
Task Size Re
q
uired server size for storin
g
Task Popularit
y
Importance of tas
k
Server CPU CPU ca
p
acit
y
offered b
y
serve
r
Server Stora
g
e Stora
g
e size offered b
y
serve
r
5.2 The Capacity Experiment
In the first experiment, the algorithm's performance is
evaluated by varying the CPU capacity for task
requests. By adjusting the CPU value, different task
offloading decisions are observed. Here, 3 types of
extant method, that are introduced in chapter 4.2.1,
are imported to compare with the proposed algorithm.
Initially, the algorithm is run to determine a
selection that minimizes system overhead. In this
phase, the capacities of the cloud server, edge server,
and local devices are predefined. Here, "Task CPU"
refers to the required processing capacity, while
"Task Size" indicates the storage requirement for
each task. The algorithm employs a non-cooperative
game theory approach, making decisions based on
single-oriented connections. To assess the impact of
CPU requirements, the fifth task is treated as a
variable, with its required CPU capacity adjusted
from 0.1GHz to 1GHz.
After iterating the selection process three times,
the resulting task allocation is 0-0-1-0-0, indicating
that the third task is offloaded to the edge server while
the others are processed locally.
Following the initial result, the algorithm
considers task popularity and the storage capacity of
edge servers in the Dynamic Services Caching phase.
The outcome of this phase is 0-1-1-0-0, meaning that
tasks 2 and 3 cache their services on the edge server,
while the others do not.
Finally, combining the initial result with the
caching outcome, the final task offloading decision is
made, yielding the selection 0-0-1-0-0, where only
the third task is offloaded to the edge server, and the
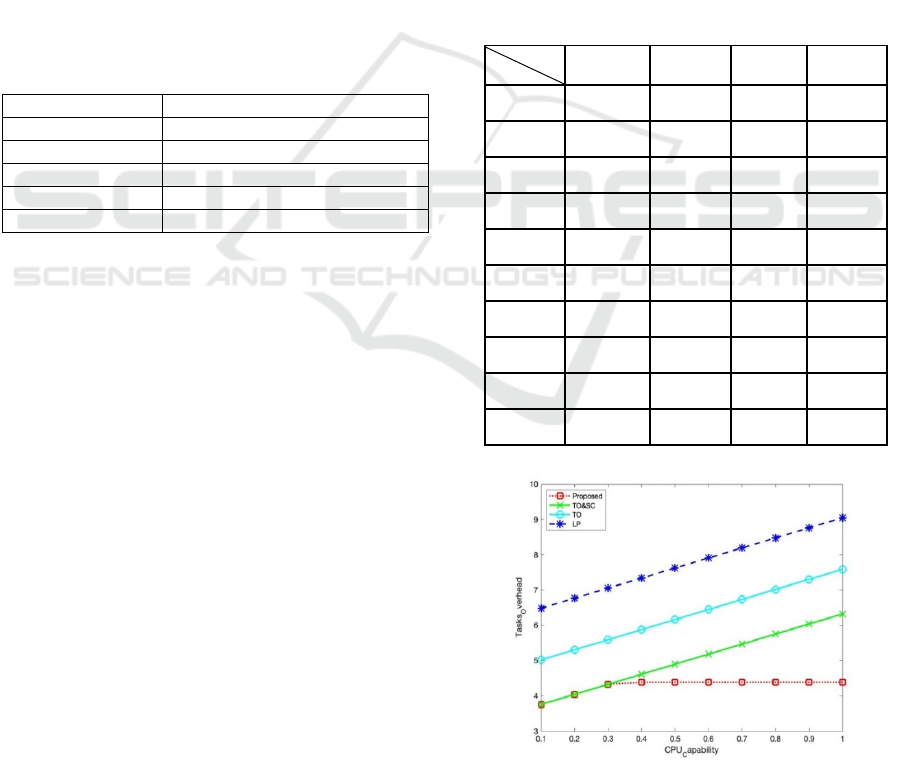
remaining tasks are processed locally. As depicted in
Figure 2, when the CPU requirement is not
excessively high, the algorithm achieves the lowest
task offloading cost compared to other methods.
However, when the CPU requirement exceeds a
certain threshold, the cost becomes constrained by the
limited storage capacity of the edge server, leading to
no further cost reduction.
Table 2: Factors to select the best server of task.
Method
Storage
Propose TOSC TO LP
0.1 3.75602 3.75602 5.0203 6.48231
0.2 4.04102 4.04102 5.3053 6.76731
0.3 4.32602 4.32602 5.5903 7.05231
0.4 4.38102 4.61102 5.8753 7.33731
0.5 4.38102 4.89602 6.1603 7.62231
0.6 4.38102 5.18102 6.4453 7.90731
0.7 4.38102 5.46602 6.7303 8.19231
0.8 4.38102 5.75102 7.0153 8.47731
0.9 4.38102 6.03602 7.3003 8.76231
1.0 4.38102 6.32102 7.5853 9.04731
Figure 2: The cost of the task offloading with the change of
CPU requirement.
A Greedy Dynamic Task Offloading and Service Management in V2V Networks
657
5.3 The Storage Experiment
In the second experiment, the performance of the
algorithm is assessed by varying the storage capacity
of the edge servers. The process for determining the
final task offloading decision follows the same steps
as in the first experiment, but with a key difference:
the storage capacity of the edge servers is altered in
each iteration. This adjustment is crucial, as the
storage capacity directly impacts the number of tasks
that can be offloaded, as well as the popularity of
those tasks within the network.
For this experiment, the storage unit is set to 3,
meaning that each edge server has the capacity to
accommodate three tasks. Each task has a uniform
size of 1, while their respective values are assigned as
1, 2, 0, 0, and 1. These values represent the
importance or priority of the tasks in the system,
which influences the offloading decisions.
The experiment begins with the execution of the
Dynamic Service Caching algorithm. This step
determines which tasks should be cached on the edge
servers based on their popularity and the available
storage space. The outcome of this step guides the
subsequent task offloading process by ensuring that
high-priority tasks are positioned where they can be
processed most efficiently.
Following the caching decisions, the Adjustment
of Task Offloading phase is conducted. In this phase,
the algorithm refines the initial offloading decisions,
taking into account the caching results and the storage
constraints of the edge servers. The final offloading
decisions, under these conditions, are determined to
be 0-0-0-1-1. This result indicates that the last two
tasks will be offloaded to the edge server, while the
first three tasks will remain for local processing.
The experiment also explores how different
storage conditions, combined with a fixed CPU
capacity of 0.3, influence the overall cost associated
with each offloading decision. The analysis reveals
that as the storage capacity and task values vary, the
cost of offloading decisions fluctuates accordingly.
This relationship underscores the importance of
optimizing both storage and processing capacities to
minimize costs and maximize efficiency in the V2V
communication system.
This experiment highlights the critical role of
edge server storage in the task offloading process. By
adjusting storage capacity and analyzing its impact on
task allocation, the algorithm demonstrates its ability
to adapt to varying network conditions, thereby
ensuring efficient resource utilization and optimal
performance across different scenarios.
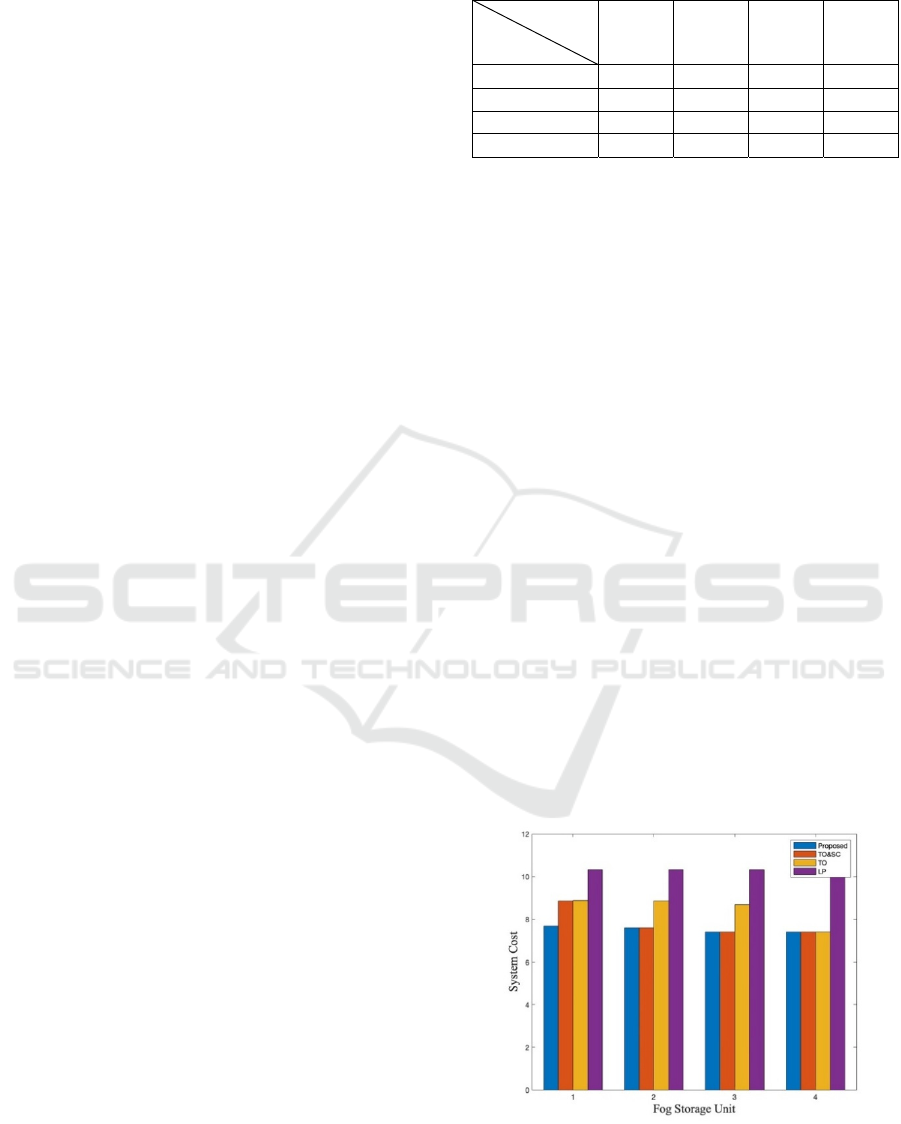
Table 3: Factors to select the best server of task.
Storage
Methods
1 2 3 4
Proposed 7.68642 7.59442 7.40793 7.40793
TOSC 8.8587 7.59442 7.40793 7.40793
TO 8.86992 8.8587 8.6722 7.40793
LP 10.3207 10.3207 10.3207 10.3207
5.4 Analysis
In the first experiment, the results, as illustrated in
Figure 2, demonstrate the impact of varying CPU
capacity in the edge server using different data
transfer methods. The proposed algorithm
consistently achieves the lowest transmission cost
compared to a singular processing method.
Furthermore, the cost of task offloading peaks when
the CPU capacity is sufficiently high, as the CPU can
easily handle the tasks without requiring additional
resources.
In the second experiment, the results, presented in
Figure 3, focus on the influence and effectiveness of
server storage. Under identical storage conditions, the
proposed algorithm outperforms other algorithms by
minimizing the cost of task offloading. Similar to the
first experiment, when the storage capacity is
sufficiently large, the cost stabilizes because the tasks
no longer fully occupy the available server space.
These experiments collectively demonstrate the
validity and effectiveness of the proposed algorithm
in optimizing task offloading in V2V communication
systems. The algorithm's ability to minimize costs
while effectively utilizing CPU capacity and server
storage underscores its potential for practical
applications in edge computing environments.
Figure 3: The cost of the task offloading with the change of
server storage.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
658

However, sufficient edge computing capacity is
currently a challenge and the relative movement
between vehicles and vehicles causes the challenge of
stable information connection and further influences
the entire communication network of V2V.
6 CONCLUSIONS
This paper presents an effective algorithm and
framework for task offloading and service
downloading, inspired by multi-predecessor
investigations and research. The algorithm considers
various factors, including task size, server storage,
and task popularity, to optimize task offloading
decisions. These considerations allow for intelligent
service downloading decisions based on the specific
conditions of the network. As demonstrated through
experimental simulation and validation, the proposed
algorithm can effectively minimize both time delays
and energy consumption by making informed,
strategic decisions.
Looking ahead, further improvements could be
made to enhance the stability of V2V networks,
particularly in scenarios where vehicles are moving at
high speeds. Additionally, the development of
vehicle-to-infrastructure communication holds
promise for fully leveraging the computational
resources of roadside infrastructures.
REFERENCES
Zeng, J., Zhang, H., Wang, H., Liu, Y., & Wang, W. (2020).
Mobile edge communications, computing, and caching
(MEC3) technology in the maritime communication
network. China Communications, 17(5), 223-234.
He, Y., Li, Y., Chen, Y., & Wang, H. (2019). D2D
communications meet mobile edge computing for
enhanced computation capacity in cellular networks.
IEEE Transactions on Wireless Communications,
18(3), 1750-1763.
Liu, L., Wang, T., Chen, Y., & Bensaou, B. (2021).
Vehicular edge computing and networking: A survey.
Mobile Networks and Applications, 26(3), 1145-1168.
Pachat, J., Chen, Y., & Chen, Y. (2020). Index coding in
vehicle to vehicle communication. IEEE Transactions
on Vehicular Technology, 69(10), 11926-11936.
Dey, K. C., Ding, Y., & Zheng, Y. (2016). Vehicle-to-vehicle
(V2V) and vehicle-to-infrastructure (V2I)
communication in a heterogeneous wireless network –
Performance evaluation. Transportation Research Part
C: Emerging Technologies, 68, 168-184.
Navas, F., & Milanés, V. (2019). Mixing V2V- and non-
V2V-equipped vehicles in car following.
Transportation Research Part C: Emerging
Technologies, 108, 167-181.
Perfecto, C., Del Ser, J., & Bennis, M. (2017). Millimeter-
wave V2V communications: Distributed association
and beam alignment. IEEE Journal on Selected Areas
in Communications, 35(9), 2148-2162.
Ahmad, S. A., Bakhshizadeh, A., & Yilmaz, M. (2019). V2V
system congestion control validation and performance.
IEEE Transactions on Vehicular Technology, 68(3),
2102-2110.
Bian, Y., Wu, C., & Zheng, Y. (2019). Reducing time
headway for platooning of connected vehicles via V2V
communication. Transportation Research Part C:
Emerging Technologies, 102, 87-105.
Gao, H., Zhao, J., & Yin, Y. (2021). V2VR: Reliable hybrid-
network-oriented V2V data transmission and routing
considering RSUs and connectivity probability. IEEE
Transactions on Intelligent Transportation Systems,
22(6), 3533-3546.
Bazzi, A., & Wong, K. W. (2017). On the performance of
IEEE 802.11p and LTE-V2V for the cooperative
awareness of connected vehicles. IEEE Transactions on
Vehicular Technology, 66(11), 10419-10432.
A Greedy Dynamic Task Offloading and Service Management in V2V Networks
659
