
Human Activity Recognition on Embedded Devices: An Edge AI
Approach
Graziele de C
´
assia Rodrigues
1 a
and Ricardo Augusto Rabelo Oliveira
2 b
1
Computing and Systems Department, Universidade Federal de Ouro Preto, Joao Monlevade, Brazil
2
Computing Department, Universidade Federal de Ouro Preto, Ouro Preto, Brazil
Keywords:
Human Activity Recognition, Embedded Devices, TensorFlow Lite, Real-Time, Edge AI.
Abstract:
Human Activity Recognition (HAR) is a technology aimed at identifying basic movements such as walking,
running, and staying still, with applications in sports monitoring, healthcare, and supervision of the elderly
and children. Traditionally, HAR data processing occurs in cloud servers, which presents drawbacks such as
high energy consumption, high costs, and reliance on a stable Internet connection. This study explores the fea-
sibility of implementing human activity recognition directly on embedded devices, focusing on three specific
movements: walking, jumping, and staying still. The proposal uses machine learning models implemented
with LiteRT (known as TensorFlow Lite), enabling efficient execution on hardware with limited resources.
The developed proof of concept demonstrates the potential of embedded systems for real-time activity recog-
nition. This approach highlights the efficiency of edge AI, enabling local inferences without the need for cloud
processing.
1 INTRODUCTION
Human Activity Recognition (HAR) involves iden-
tifying basic movements such as walking, running,
jumping, and standing still (V. Sharma and Cano,
2024). This technology has applications in various
areas, including sports monitoring, hospital care, el-
derly and child supervision, among others (Shub-
ham Gupta and Deb, 2022). However, processing
these data, commonly performed on cloud servers,
poses challenges such as high energy consumption
and reliance on Internet connectivity (Bidyut Saha
and Roy, 2024).
Traditionally, machine learning algorithms, in-
cluding convolutional neural networks (CNNs), re-
current neural networks (RNNs), and long short-term
memory networks (LSTMs), have been used for hu-
man activity classification (Waghchaware and Joshi,
2024). However, these methods require significant
computational resources, making them challenging
to implement on resource-constrained devices. A
promising approach to overcoming these challenges is
edge computing, where data processing occurs locally
on the device, without the need for cloud transfer.
This approach offers advantages such as enhanced
a
https://orcid.org/0009-0008-3190-3102
b
https://orcid.org/0000-0001-5167-1523
privacy, reduced energy consumption, and lower la-
tency, making it particularly relevant for applications
requiring real-time responses.
In this context, tools like LiteRT, formerly known
as TensorFlow Lite, have enabled the execution of
deep learning models on mobile and embedded de-
vices. Studies have shown that it is possible to
achieve significant reductions in model size and
computational complexity, making it feasible to use
on resource-limited devices (Diab and Rodriguez-
Villegas, 2022). However, adapting these models to
run efficiently in such constrained environments still
presents challenges, particularly in optimizing infer-
ence speed and maintaining accuracy.
This work explores the development of an embed-
ded device for human activity recognition, focusing
on three specific movements: walking, standing still,
and jumping. The goal is to demonstrate the feasibil-
ity of deploying machine learning models to operate
efficiently on resource-constrained devices.
This paper is organized as follows. Section 2
presents related work on HAR and edge computing
approaches. Section 3 describes the proposed sys-
tem, including the hardware, data collection process,
and model implementation. Section 4 discusses the
experimental results, and finally, Section 5 provides
conclusions and future directions.
Rodrigues, G. C. and Oliveira, R. A. R.
Human Activity Recognition on Embedded Devices: An Edge AI Approach.
DOI: 10.5220/0013475300003929
In Proceedings of the 27th International Conference on Enterprise Information Systems (ICEIS 2025) - Volume 1, pages 973-979
ISBN: 978-989-758-749-8; ISSN: 2184-4992
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
973

2 RELATED WORKS AND
THEORETICAL REFERENCES
This section presents a literature and theoretical re-
view on HAR, edge computing, and TensorFlow.
2.1 Human Activity Recognition (HAR)
Human activity recognition (HAR) has been exten-
sively studied due to its applicability in areas such
as healthcare and sports. Inertial sensor-based ap-
proaches (IMUs) have stood out for their ability to
capture detailed human motion data, enabling accu-
rate and real-time analysis. When combined with ma-
chine learning algorithms, these data allow human ac-
tivities to be classified with high accuracy.
The study by (da Silva et al., 2023) developed a
system using IMUs for the collection of motion data.
The work evaluated three models of recurrent neural
networks: long short-term memory (LSTM), gated re-
current unit (GRU) and simple RNN to classify hu-
man activities, demonstrating their effectiveness in
recognizing motion patterns in HAR systems.
Likewise, (Waghchaware and Joshi, 2024) con-
ducted a review of machine learning and deep learn-
ing techniques applied to human activity recognition.
Their study explores the use of data from inertial sen-
sors and images, highlighting the performance of dif-
ferent methods and providing a critical analysis of
their advantages and limitations.
In another example, (Ann-Kathrin Schalkamp and
Sandor, 2023) investigates the use of digital sensors
for human action recognition to detect changes in
movement patterns, aiming to identify diseases be-
fore clinical diagnosis. This approach highlights the
potential of HAR systems not only for activity clas-
sification, but also for health monitoring and disease
prevention. These studies underscore the relevance of
HAR research, demonstrating its application in phys-
ical activities and health-related areas.
2.2 Edge Computing
Edge computing is an approach that processes data
near the point of capture, reducing latency and re-
liance on remote connections. This technique is in-
creasingly utilized in wearables and IoT devices, en-
abling real-time analysis, enhanced data privacy, and
energy efficiency.
(M. S. Elbamby and Bennis, 2019) discusses the
potential of edge computing for applications requiring
high reliability and low latency, such as virtual reality
and autonomous vehicles. The study highlights how
local processing can enhance the scalability of wire-
less systems in critical scenarios.
Similarly, the work of (M. C. Silva and Oliveira,
2022) applied edge computing during the COVID-19
pandemic, presenting a proof of concept for an in-
telligent healthcare system. This system integrated
wearable biometric sensors to monitor the vital signs
of healthcare professionals, processing data locally
to generate immediate insights. The research lever-
aged data fusion, big data, and machine learning tech-
niques, demonstrating the benefits of this approach in
health and safety contexts.
Meanwhile, (et al., 2024) highlight the crucial
role of edge computing in human activity recognition,
enabling devices to perform real-time inferences di-
rectly at the data capture point, without relying on
cloud processing. This approach not only improves
energy efficiency but also facilitates the development
of autonomous devices capable of operating in envi-
ronments with connectivity constraints.
2.3 TensorFlow and TensorFlow Lite
Machine learning (ML), a subfield of artificial intel-
ligence, enables systems to learn patterns and make
predictions based on data. Traditionally, ML models
are trained and deployed in the cloud, with local de-
vices like microcontrollers used only for data collec-
tion and transmission. However, the growing demand
for real-time processing has led to frameworks like
TensorFlow Lite, which allow models to run directly
on resource-constrained devices.
TensorFlow Lite, now known as LiteRT, is de-
signed to run machine learning models on microcon-
trollers and other hardware with severe memory and
processing constraints (A. Haj-Ali and Weiser, 2020).
It enables local inferences, eliminating the need for
continuous cloud connectivity — a crucial factor for
battery-operated devices. Additionally, reducing data
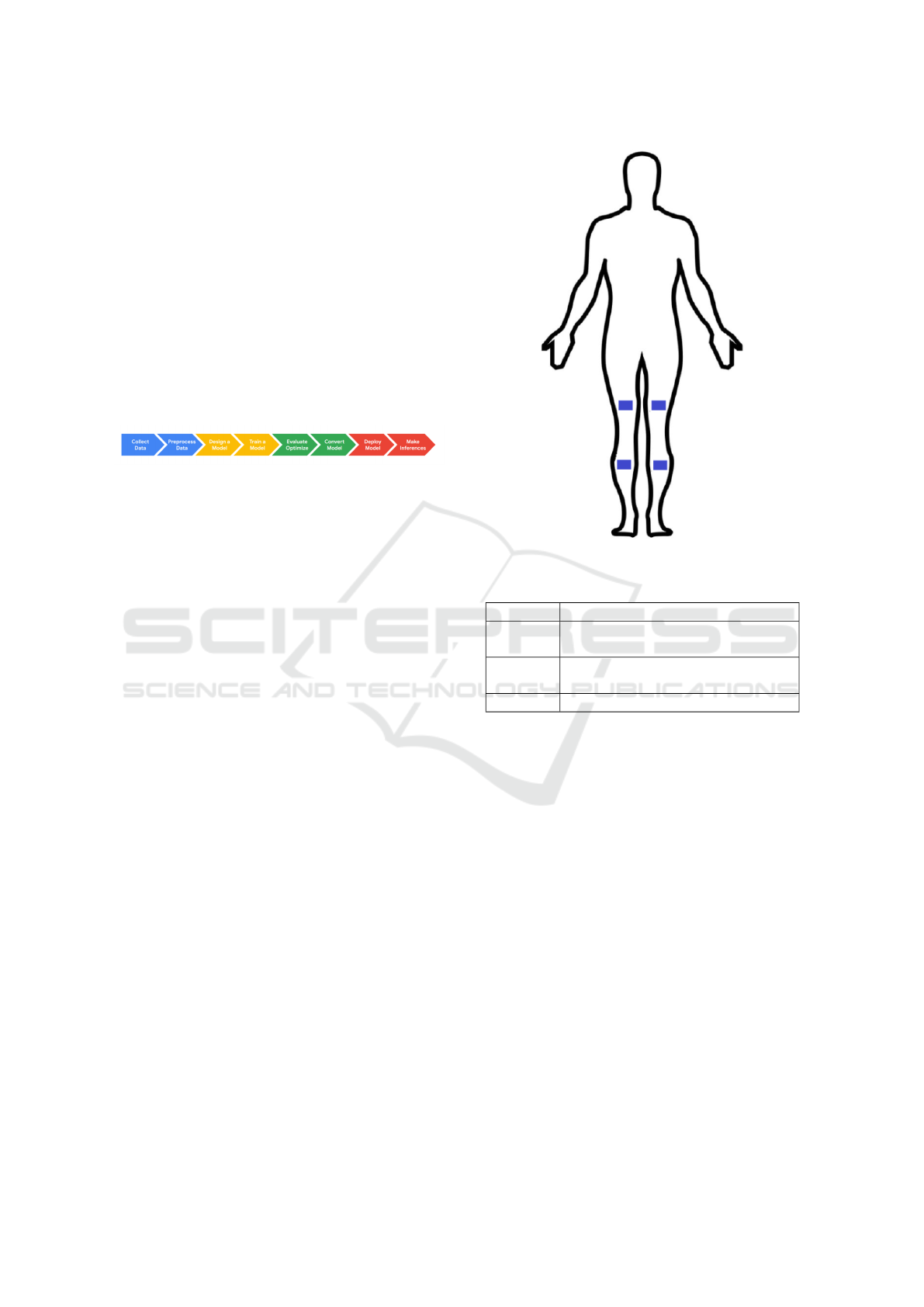
transmission promotes energy efficiency. In Figure
1, the complete development flow using TensorFlow
Lite is illustrated.
Recent studies, such as those by (S. S. Saha and
Srivastava, 2022) and (et al., 2023), address tech-
niques for optimizing models on low-capacity de-
vices. These works explore methods like model com-
pression, quantization, and strategies to maximize ef-
ficiency for specific tasks, such as signal classifica-
tion.
Practical applications of TensorFlow Lite in hu-
man activity recognition have been presented by
(V. Sharma and Cano, 2024) and (Bidyut Saha and
Roy, 2024). These studies demonstrate the frame-
work’s effectiveness in microcontrollers for real-time
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
974
activity classification, highlighting TinyML as a vi-
able solution for embedded devices in applications
like health monitoring and intelligent wearable de-
vices.
3 METHODS
In this section, we describe the steps and techniques
involved in developing the embedded device for hu-
man activity recognition. Figure 1 illustrates the over-
all workflow used with TensorFlow Lite. The pro-
cess is divided into three main stages: data collec-
tion, model training and conversion, and deployment
on the device.
Figure 1: Development flow using TensorFlow Lite.
3.1 Data Collection
Movement data was collected using four wearable
devices equipped with the BNO080 inertial sensor,
which provides accelerometer, gyroscope, and mag-
netometer readings with 9 degrees of freedom. Each
device was integrated with a NodeMCU ESP-32 mi-
crocontroller, powered by a rechargeable lithium-ion
battery, ensuring portability and extended operation.
The devices were strategically positioned on dif-
ferent regions of the legs, as illustrated in Figure 2,
to maximize movement capture and enhance activity
recognition. Data transmission was carried out via
Bluetooth at a frequency of 20 Hz, corresponding to
one sample every 50 milliseconds, ensuring a high-
resolution temporal dataset.
The dataset was collected from these four devices,
each recording accelerometer and gyroscope data for
three specific activities: walking, jumping, and stand-
ing still. Each sample comprised six normalized fea-
tures (ax, ay, az, gx, gy, gz).
The recorded activities, as described in Table 1,
include walking, standing still, and jumping. Data
collection was conducted under various conditions to
ensure the diversity and quality of the dataset. Raw
data underwent preprocessing, including noise re-
moval and normalization, ensuring compatibility with
the machine learning model.
During data processing, each device recorded ap-
proximately 1,000 samples for each gesture. The col-
lected data, sampled at a frequency of 20 Hz (1 sam-
ple every 50 ms), were grouped such that for each sec-
ond of gesture duration, 20 samples were obtained.
This procedure was applied individually to the data
collected by each device.
Figure 2: Positions of the wearable devices.
Table 1: Description of recorded activities.
Label Description
Walking Data collected indoors during a
walking activity
Jumping Data collected indoors during
jumping activities
Standing Data collected while standing still
Figures 3 and 4 display 250 samples of accelera-
tion and gyroscope data for the activities of walking,
standing still, and jumping. In the acceleration graph,
walking shows significant variations across all three
axes with typical cyclical oscillations. When standing
still, the readings are stable and close to zero, with
minor fluctuations. During jumping, the data exhibit
peaks, especially on the y-axis, and more abrupt vari-
ations due to the intensity of the movement.
In the gyroscope graph, moderate variations in an-
gular velocity during walking reflect the swinging of
the legs, while at rest, angular velocity remains close
to zero. During jumping, higher intensity peaks are
observed but are less frequent than in the acceleration
data.
3.2 Model Training and Conversion
In this stage, the first step was to implement a neu-
ral network model using the TensorFlow/Keras library
to classify the actions of walking, standing still, and
jumping based on six features per sample (ax, ay, az,
Human Activity Recognition on Embedded Devices: An Edge AI Approach
975
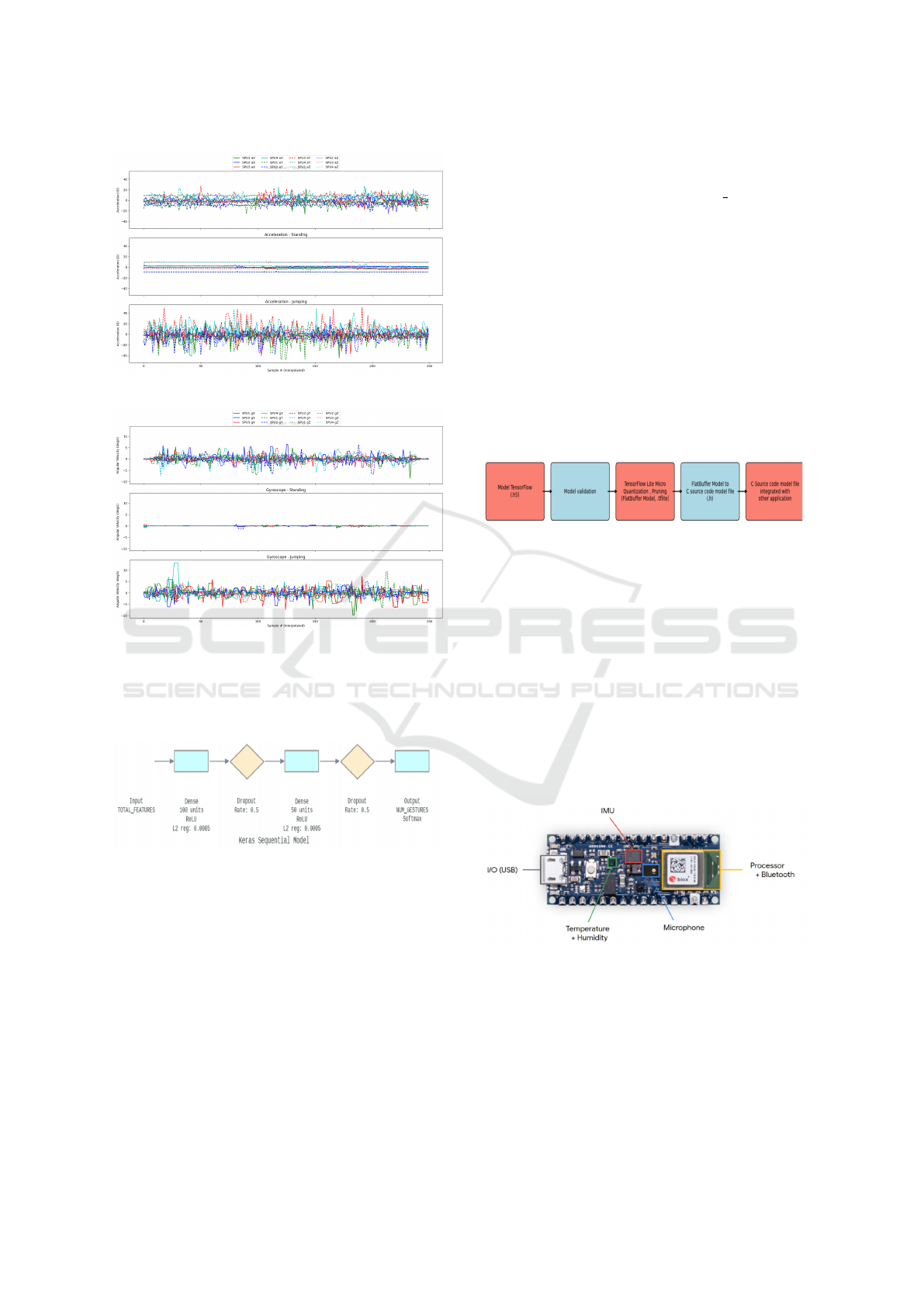
Figure 3: Collected acceleration data.
Figure 4: Collected gyroscope data.
gx, gy, gz). The model, shown in Figure 5, is defined
as a sequential network composed of Dense Layers
with ReLU activation, dropouts, and an output layer
with Softmax activation.
Figure 5: TensorFlow Model Structure.
The collected data was labeled using a one-hot
encoding scheme, where each class was represented
as a binary vector. The segmentation was performed
by dividing the continuous sensor readings into non-
overlapping windows of 20 samples per gesture, cor-
responding to 1 second of data per instance. This seg-
mentation ensured that each instance captured a full
second of motion data, preserving the temporal char-
acteristics necessary for classification.
To ensure unbiased training, the dataset was ran-
domly shuffled before splitting into 60% for training,
20% for validation, and 20% for testing.
The model was compiled using the Adam opti-
mizer, an efficient choice for neural networks. The
loss function employed was categorical crossentropy.
During training, the metrics monitored included accu-
racy and mean absolute error (MAE). The model was
trained for up to 500 epochs with a batch size of 32,
using the training and validation datasets.
Next, the model was evaluated to validate its per-
formance with test data. Subsequently, it was con-
verted into the TensorFlow Lite (TFLite) format for
use in embedded devices. The model was then trans-
formed into a byte array in C format using the xxd
tool. The resulting data was stored in a header file
named model.h, which can be directly integrated into
the firmware of embedded systems. The final model
had a size of 71316 bytes. Figure 6 illustrates the
steps followed in this process.
Figure 6: Model Training and Conversion Steps.
3.3 Deployment on the Device
During the deployment stage, the Arduino Nano 33
BLE board was used, as illustrated in Figure 7. This
board was designed to cater to the growing audience
of developers, makers, and enthusiasts in the fields of
AIoT (Artificial Intelligence and Internet of Things),
combining integrated sensors and Bluetooth Low En-
ergy (BLE) connectivity. Equipped with an Arm®
Cortex®-M4F processor (with FPU) operating at 64
MHz and 1 MB of Flash memory + 256 kB of RAM,
the Arduino Nano 33 BLE is a complete and low-
power board.
Figure 7: Arduino Nano 33 BLE.
To test the feasibility of the project, sensor data
was emulated. The model was deployed on the board
using the .h file generated in the previous stage. Using
the emulated sensor features, such as acceleration on
the X, Y, and Z axes, as well as gyroscope data on the
same axes, the board was able to infer, locally and ac-
curately, the type of movement performed, as shown
in Figure 8.
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
976
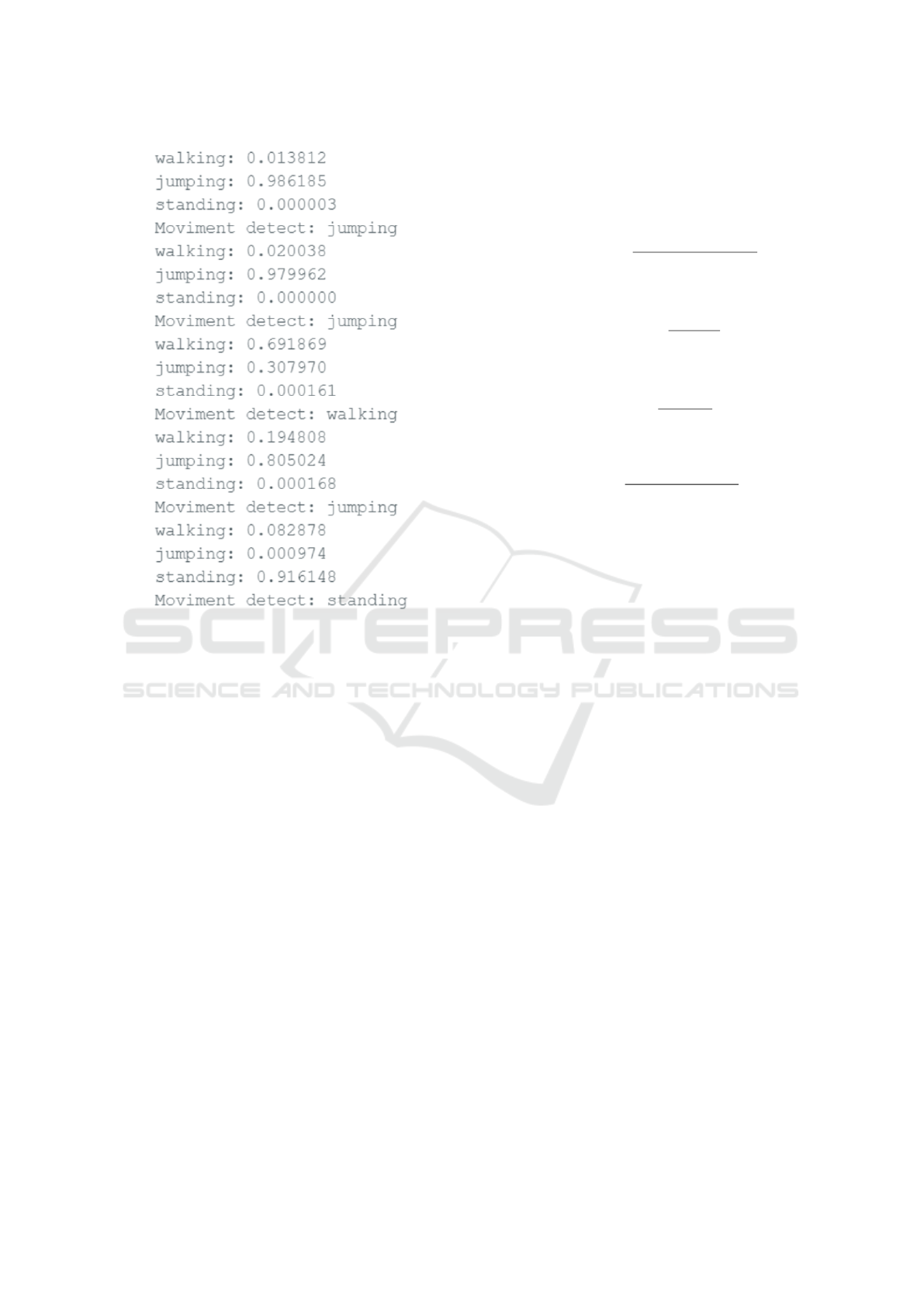
Figure 8: Experiment.
This experiment serves as a proof of concept and
demonstrates the potential of the device to function as
an edge system. It can receive sensor data and make
decisions about the type of movement without need-
ing to send the data to external servers. This enables
more efficient operation, lower power consumption,
and greater privacy—essential characteristics for the
development of intelligent edge systems.
3.4 Evaluation Metrics
To assess the performance of the model and the em-
bedded device, several metrics were used during both
the training phase and testing with real data. Below,
the main metrics are presented
3.4.1 During Training
• Accuracy. The ratio of correct predictions to the
total number of samples evaluated.
• Validation Loss (Val Loss). Represents the aver-
age error of the model on the validation dataset.
A low value indicates that the model is fitting the
data correctly.
• MAE (Mean Absolute Error). The average of
the absolute differences between predicted and ac-
tual values.
3.4.2 In the Test Data
• Accuracy. The percentage of correct predictions.
Accuracy =
TP + TN
TP + TN + FP + FN
(1)
• Precision. The proportion of correctly predicted
positive instances.
Precision =
TP
TP + FP
(2)
• Recall. The proportion of actual positive in-
stances correctly identified.
Recall =
TP
TP + FN
(3)
• F1-Score. The harmonic mean of precision and
recall.
F1 = 2 ·
Precision · Recall
Precision + Recall
(4)
• Confusion Matrix. A distribution of correct and
incorrect predictions, highlighting potential mis-
classifications among classes.
3.4.3 In the Application
• Inference Latency. The time required to make a
prediction from sensor data.
• Power Consumption. Measurement of energy
consumption during inference.
Power (mWs) = current (mA) · voltage (V) · time (s)
(5)
4 RESULTS AND DISCUSSION
In this section, we present the results obtained during
the development of the model and its deployment on
the embedded device.
4.1 Model Performance During
Training and Validation
Table 2 presents the metrics obtained during the train-
ing of the model, designed to recognize three human
actions: walking, jumping and standing.
The results indicate that the model achieved good
accuracy during training (93.65%) but a decline in
validation accuracy (84.78%). This difference, along
with the increase in loss and MAE, suggests early
signs of overfitting. As a solution, it would be per-
tinent to investigate whether the dataset is sufficiently
diverse or to apply training adjustments, such as reg-
ularization techniques or data augmentation.
Human Activity Recognition on Embedded Devices: An Edge AI Approach
977
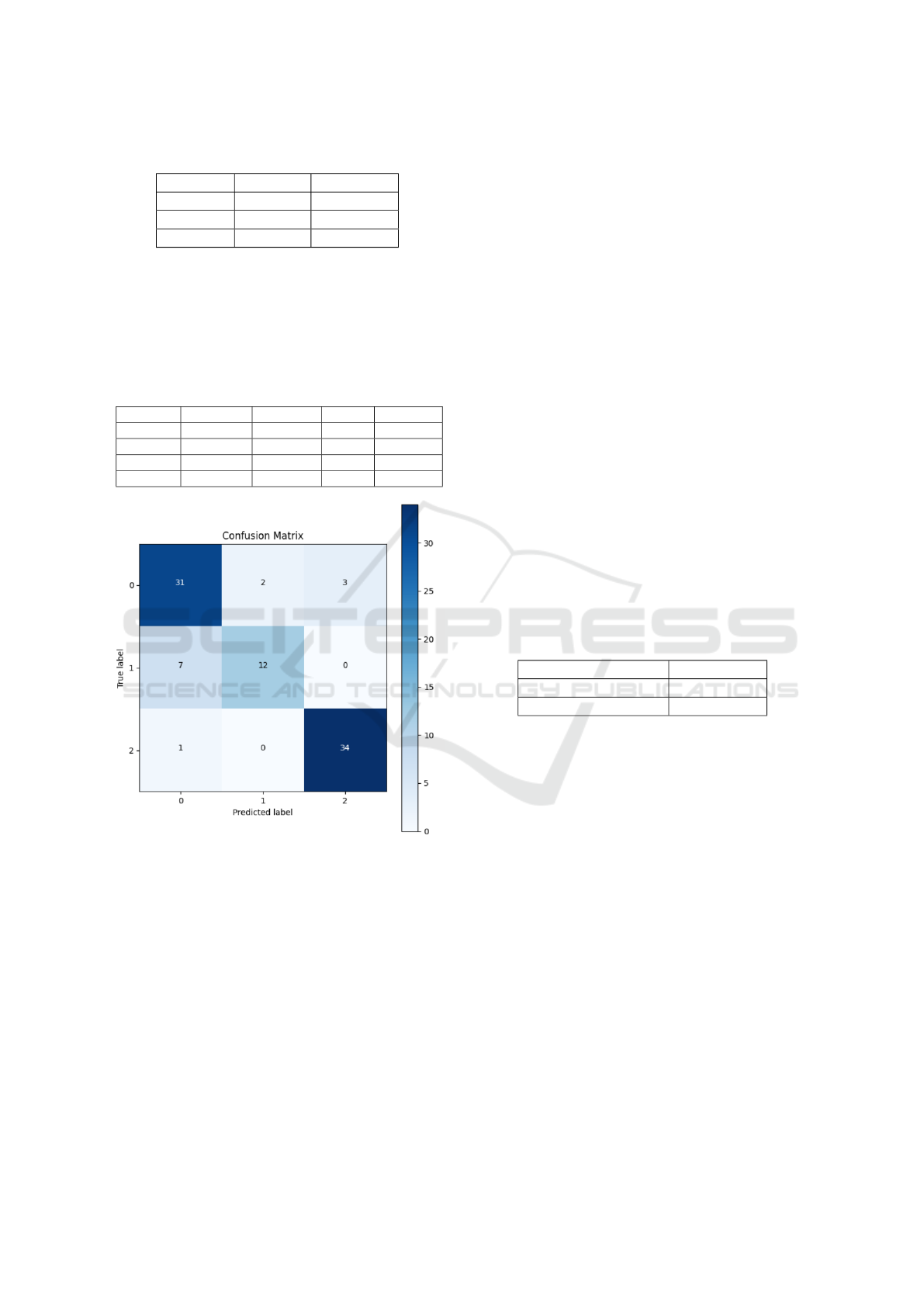
Table 2: Metrics training.
Metric Training Validation
Accuracy 0.9365 0.8478
Val Loss 0.3340 0.5964
MAE 0.1120 0.1566
4.2 Evaluation on Test Data
Table 3 presents the global and per-class metrics
based on the test data and the Figure 9 as confusion
matrix, considering the classes: 0 as Walking, 1 as
Jumping, and 2 as Standing.
Table 3: Metrics on test data.
Class Accuracy Precision Recall F1-Score
Walking 0.861 0.794 0.861 0.826
Jumping 0.631 0.857 0.631 0.727
Standing 0.971 0.918 0.971 0.944
Global 0.855 0.856 0.855 0.851
Figure 9: Confusion Matrix on Test Data.
The overall results indicate that the model
achieved an accuracy of 85.56%, demonstrating its
ability to correctly classify most samples. Further-
more, the global precision of 85.63% and global recall
of 85.56% reflect a balance between the reliability of
positive predictions and the correct identification of
classes. The global F1-Score, which combines these
metrics, was 85.15%, highlighting the model’s overall
consistency.
Analyzing the per-class results:
• Walking: This class showed good performance,
with an accuracy of 86.11% and high recall, indi-
cating that most examples were correctly classi-
fied. However, the moderate precision of
79.49% suggests some predictions for this class
were misclassified as others.
• Jumping: This class showed the poorest perfor-
mance, with an accuracy of 63.16% and low re-
call, indicating the model struggled to identify this
class correctly. Despite this, the high precision
(85.7%) suggests that the model made some cor-
rect predictions for this class but struggled to dif-
ferentiate it from Walking.
• Standing Still: This class exhibited excellent per-
formance across all metrics, with an accuracy of
97.14%, high recall, and high precision, demon-
strating the model’s reliability in identifying this
class.
Although the model performs well overall, spe-
cific improvements can be made to increase accuracy
and recall for the Jumping class, ensuring a more bal-
anced classification across all categories.
4.3 Evaluation During Deployment on
the Embedded Device
Table 4 presents the latency and energy consumption
values during inference.
Table 4: Metrics during inference.
Metric Result
Latency 3.2 ms
Energy Consumption 0.1056 mWs
These results indicate that executing the Machine
Learning model developed with TensorFlow directly
on the device (local inference) is highly efficient in
terms of time and energy. The latency of only 3.2
ms demonstrates extremely fast processing, suitable
for real-time applications such as motion detection.
The energy consumption of 0.1056 mJ per inference
is extremely low, reinforcing the feasibility of embed-
ded device-based solutions for edge scenarios, such as
wearables and IoT.
It is important to note that the latency of the sys-
tem is also influenced by the sensor update rate. For
instance, the sensor sampling rate, often measured in
Hz, directly impacts the frequency at which data is
acquired. A higher sampling rate could result in more
frequent sensor readings, thus potentially increasing
the data throughput and the need for faster process-
ing times. Conversely, a lower sampling rate might
reduce the load on the system but could compromise
the real-time responsiveness of applications, such as
motion detection, which require high-frequency data.
Therefore, the choice of sensor update rate is a key
ICEIS 2025 - 27th International Conference on Enterprise Information Systems
978

factor in achieving an optimal balance between per-
formance and energy efficiency in embedded systems.
5 CONCLUSIONS
This study demonstrates the feasibility of developing
a human activity recognition (HAR) model using Ten-
sorFlow and deploying it directly on an embedded de-
vice. The results highlight the practical application of
machine learning at the edge, providing real-time per-
formance and energy efficiency.
The process, which involved data collection, pre-
processing, model training, and deployment, proved
effective in recognizing three primary activities:
walking, standing still, and jumping. The model
achieved good accuracy during the training and vali-
dation phases, despite minor challenges such as over-
fitting and reduced performance in specific activity
classifications, like jumping.
Deployment on the Arduino Nano 33 BLE val-
idated the model’s ability to perform accurate local
inference with minimal latency and energy consump-
tion. This makes it suitable for use in wearable de-
vices and IoT systems, where privacy, efficiency, and
low-power operation are crucial.
Future improvements could include diversifying
the dataset to increase representativeness, optimizing
the model’s performance for classes with lower ac-
curacy, and adding new activities to enhance the sys-
tem’s versatility. Additionally, in this study, sensor
data on the Arduino Nano 33 BLE were emulated. As
a next step, the device used for data collection could
be integrated to send information directly to the Ar-
duino Nano 33 BLE, eliminating emulation and cre-
ating a complete system.
Nevertheless, this proof of concept demonstrates
the tremendous potential of embedded systems for
real-time human activity recognition, highlighting the
efficiency of edge AI solutions. The study establishes
a solid foundation for future advances in HAR appli-
cations, meeting demands for privacy, low power con-
sumption, and high efficiency.
ACKNOWLEDGEMENTS
The authors acknowledge the use of ChatGPT, an AI
language model by OpenAI, for assisting with the
translation of this article from Portuguese to English.
REFERENCES
A. Haj-Ali, N. P. and Weiser, U. (2020). Neural networks
on microcontrollers: Saving memory at inference via
operator reordering. In 2020 ACM/IEEE 47th Annual
International Symposium on Computer Architecture
(ISCA), pages 1105–1117, Valencia, Spain.
Ann-Kathrin Schalkamp, Kathryn J. Peall, N. A. H. and
Sandor, C. (2023). Wearable movement-tracking data
identify parkinson’s disease years before clinical di-
agnosis. Nature Medicine.
Bidyut Saha, Riya Samanta, S. G. and Roy, R. B. (2024).
Towards sustainable personalized on-device human
activity recognition with tinyml and cloud-enabled
auto deployment. arXiv preprint, 2409.00093.
da Silva et al., J. C. F. (2023). Ai-based personalized
human activity recognition in walking and trekking
sports: A case study. IEEE Latin America Transac-
tions, 21(8):874–881.
Diab, M. S. and Rodriguez-Villegas, E. (2022). Embedded
machine learning using microcontrollers in wearable
and ambulatory systems for health and care applica-
tions: A review. IEEE Access, 10:98450–98474.
et al., A. M. H. (2024). Tinyml empowered transfer learning
on the edge. IEEE Open Journal of the Communica-
tions Society, 5:1656–1672.
et al., Y. A. (2023). A comprehensive survey on tinyml.
IEEE Access, 11:96892–96922.
M. C. Silva, A. G. C. Bianchi, S. P. R. J. S. S. and Oliveira,
R. A. R. (2022). Edge computing smart healthcare
cooperative architecture for covid-19 medical facili-
ties. IEEE Latin America Transactions, 20(10):2229–
2235.
M. S. Elbamby, C. Perfecto, C.-F. L. J. P. S. S. X. C. and
Bennis, M. (2019). Wireless edge computing with la-
tency and reliability guarantees. Proceedings of the
IEEE, 107(8):1717–1737.
S. S. Saha, S. S. S. and Srivastava, M. (2022). Machine
learning for microcontroller-class hardware: A re-
view. IEEE Sensors Journal, 22(22):21362–21390.
Shubham Gupta, Sweta Jain, B. R. and Deb, A. (2022). A
tinyml approach to human activity recognition. Jour-
nal of Physics: Conference Series, 2273.
V. Sharma, D. P. and Cano, J. (2024). Efficient tiny machine
learning for human activity recognition on low-power
edge devices. pages 85–90.
Waghchaware, S. and Joshi, R. (2024). Machine learning
and deep learning models for human activity recogni-
tion in security and surveillance: a review. Knowledge
and Information Systems, 66:4405–4436.
APPENDIX
In this appendix, the source code for the wearable
project can be found on GitHub: GitHub - Calc¸a
Wearable Project.
Human Activity Recognition on Embedded Devices: An Edge AI Approach
979
