
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety
Validation
Raivo Sell
1 a
, Mohsen Malayjerdi
1 b
, Ehsan Malayjerdi
2 c
, Mauro Bellone
3 d
and Heiko Pikner
1 e
1
Department of Mechanical and Industrial Engineering, Tallinn University of Technology, Estonia
2
Volvo Autonomous Solutions, Gothenburg, Sweden
3
FinEst Centre for Smart Cities, Tallinn University of Technology, Estonia
Keywords:
Automated Driving, Industry 5.0, Digital Twin, Validation and Verification.
Abstract:
Autonomy and digitalization are megatrends in today’s world and influence our everyday lives on many levels.
The same applies to industry, whereas the manufacturing and engineering industry is heavily under digital-
ization, also known as Industry 4.0. Now the next step is to focus on where human-centric and sustainable
resilient processes are considered a priority. This is an Industry 5.0 paradigm, where humans and robots must
work together, with social aspects and increased safety in mind. From the product development and engineer-
ing point of view, realistic system simulations and digital counterparts are beneficial to ensure proper complex
system development and interactions between robots and humans. In this research, we investigate the method-
ology to design and implement a comprehensive digital twin of an Autonomous Vehicle (AV) interacting in the
context of Industry 5.0 and modern industrial environments. We propose a step-by-step digital twin creation
methodology for industrial environments where the AV shuttle bus is intended to serve as a mobility service
for the workforce connected to industrial processes. In this research, the main focus is a safety assessment and
simulations of an AV interaction in the environment and humans. However, the digital twin, once created, can
be used for many other simulations and different purposes.
1 INTRODUCTION
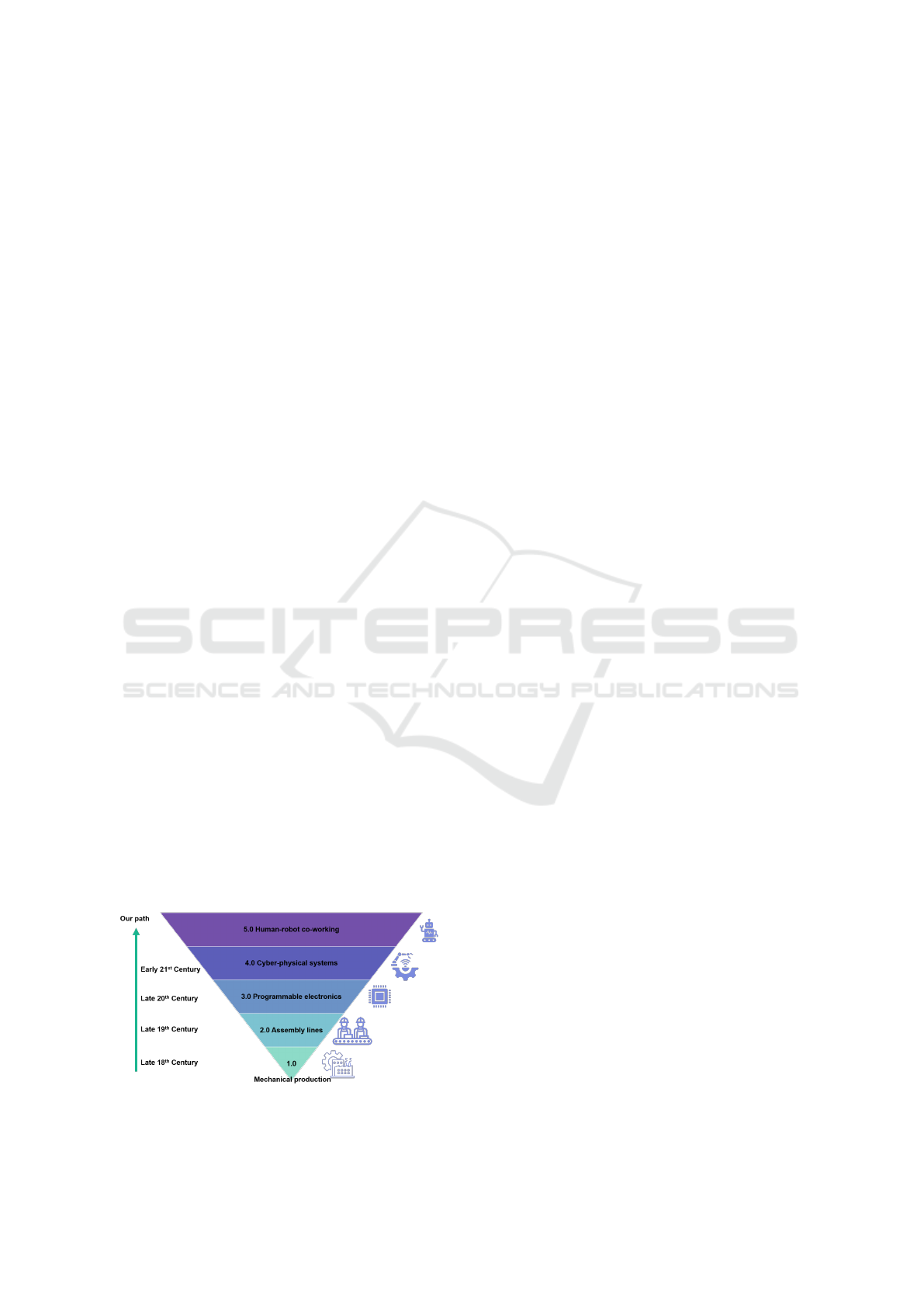
The process from Industry 1.0 to 5.0 represents the
evolution of manufacturing and production, driven
by technological advancements and changing societal
needs. In Industry 1.0, humans have seen the intro-
duction of mechanization, steam engines, and water
power, generating a transition from manual labor to
mechanized production. From Industry 2.0, electric-
ity and assembly lines powered the introduction of
mass production techniques, thus fostering work on
standardization and large-scale production. The main
strength in this stage was the enhanced productivity at
a reduced cost. In the third revolution, in the late 20th
century, we have seen the introduction of automation,
computing machines, and electronics. This also gen-
erated the digitalization of manufacturing processes,
a
https://orcid.org/0000-0003-1409-0206
b
https://orcid.org/0000-0001-6976-2095
c
https://orcid.org/0000-0002-6526-6059
d
https://orcid.org/0000-0003-3692-0688
e
https://orcid.org/0000-0002-5360-4321
the introduction of robotics, and initial IT systems to
automate simple mechanical tasks. Here, the industry
benefited from greater precision, efficiency, and flexi-
bility. Workers became more educated and performed
less risky tasks, thus improving safety.
The fourth industrial revolution, still happening
these days, is characterized by the introduction of
cyber-physical systems, the Internet of Things (IoT),
artificial intelligence (AI), big data, and cloud com-
puting. Industries are becoming smarter, and ma-
chines are more interconnected, the focus goes on
data in terms of quantity and speed in data exchange
and fostering initial automated decision-making.
The principles at the core of Industry 5.0 lie
in the enhancement of human-machine collaboration
and customization of production without forgetting
about sustainability and ethical AI. In simple words,
the concept of Industry 5.0 is to integrate advanced
technology having human-centric goals (Alves et al.,
2023). The focus shifts to the integration of human
creativity and decision-making with advanced tech-
nologies like AI and robotics to create more cus-
tomized and sustainable production.
660
Sell, R., Malayjerdi, M., Malayjerdi, E., Bellone, M. and Pikner, H.
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation.
DOI: 10.5220/0013476600003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 660-667
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
Building upon the principles of Industry 5.0, the
integration of human-centric, sustainable, and re-
silient processes into mobility systems is becoming
a cornerstone for future innovation. Advanced tech-
nologies are pivotal in this transition, enabling the de-
velopment of adaptive, efficient, and safe solutions
for industrial and mobility ecosystems. In the con-
text of AVs, these principles are critical to design-
ing systems that harmoniously interact with humans
while addressing sustainability goals. The incorpora-
tion of circular economy practices, enhanced collab-
oration between human workers and intelligent sys-
tems, and robust resilience strategies ensures the scal-
ability and reliability of these innovations. This mul-
tidimensional approach fosters not only technological
advancement but also addresses societal and environ-
mental challenges, aligning industrial progress with
broader human and ecological needs. Several EU
Horizon projects are actively addressing these chal-
lenges e.g. SURE 5.0 - Supporting the SMEs Sus-
tainability and Resilience Transition towards Indus-
try 5.0 in the Mobility, Transport and Automotive,
Aerospace and Electronics European Ecosystems, fo-
cusing on supporting SMEs in adopting advanced
technologies and integrating Industry 5.0 principles
into their operations.
The question is now: ”how AVs and smart trans-
portation systems fit into the concept of Industry
5.0?” From a technological and societal perspective,
driverless vehicles embody the core principles of In-
dustry 5.0, i.e. human-machine collaboration, cus-
tomization of production, sustainability, the human-
centric goal in technological development, and eth-
ical AI. Driverless vehicles represent an example of
an advanced collaboration between AI, robotics, and
human input. Fully AVs must be designed to coexist
with road users, requiring advanced human-machine
interaction capabilities, such as intuitive communica-
tion and adaptive behaviors in the emerging concept
known as language of driving (Kalda et al., 2022).
Furthermore, such automated vehicles are embedded
in a more complex system of intelligent mobility, thus
Figure 1: Conceptual depiction of the path from mechanical
production to Industry 5.0.
embracing different modes of transportation and on-
demand services into more integrated mobility as a
service concept. This is a clear example of customiza-
tion in the production of services. The new mobil-
ity systems are also designed in consideration of high
efficiency, electrification, and reduced environmental
pollution, thus integrating the sustainability concept
of Industry 5.0.
2 INTEGRATED AND SECURE
MOBILITY AS A SERVICE
APPROACH
Mobility as a Service (MaaS) is a concept focused
on offering on-demand services with optimized re-
sources. In this framework, centrally orchestrated
AVs play a crucial role in addressing mobility de-
mands for specific cases and situations (Hensher
et al., 2020). However, for MaaS to be effectively
implemented, AV orchestration cannot function as a
standalone component of the mobility solution, par-
ticularly in public or semi-public transportation con-
texts. Instead, AVs and on-demand transport services
must be integrated into a comprehensive transport
management system considering all available trans-
portation options (Slamnik-Krije
ˇ
storac et al., 2023).
For instance, alongside traditional public transport
solutions such as buses and trains, MaaS should ac-
commodate alternative modes of transportation like
public e-scooters, ride-sharing, and more. Addition-
ally, various services, directly and indirectly related to
transportation, must be considered. Directly related
services include ticketing, route planning, seat book-
ing, and similar functions. Indirect services like mon-
itoring, statistical data collection, future route plan-
ning, and other emerging functionalities should also
seamlessly interface with transportation services.
In the context of Industry 5.0, it is essential
to integrate MaaS systems with industrial processes
and workforce management procedures to provide
seamless and energy-efficient services. This necessi-
tates secure communication between all sub-systems,
particularly to protect against cyberattacks (Roberts
et al., 2023).
A MaaS solution based on the open-source Esto-
nian X-Road secure data exchange framework, ini-
tially developed for governmental data exchange was
designed and implemented (Robles et al., 2019),
(Paide et al., 2018). This framework was adapted to
a MaaS transportation management system and im-
plemented in a prototype solution. The concept was
tested in practical pilot cases involving autonomous
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation
661
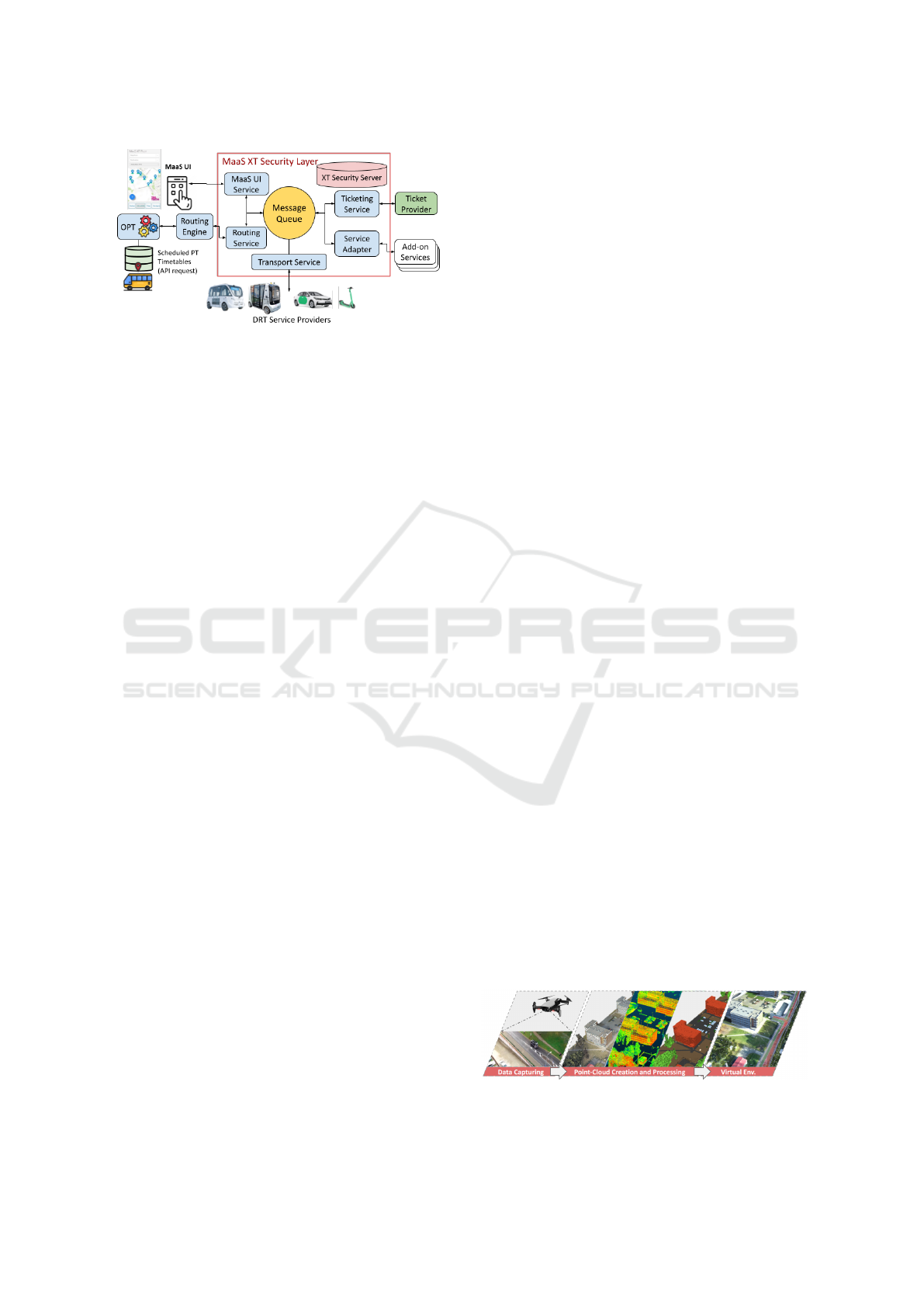
Figure 2: The architecture of the proposed MaaS XT sys-
tem is designed to seamlessly integrate multiple mobility
services into a secure and scalable ecosystem.
minibuses in locations such as Rae and the Port of
Tallinn. Additional cybersecurity experiments were
conducted on the solution, as detailed in related pub-
lications (Roberts et al., 2021). Our research demon-
strates the potential of integrating secure, efficient,
and flexible transportation management systems to
address the growing complexity of mobility demands
in modern urban and industrial environments.
The proposed MaaS XT system (Kalda et al.,
2024) is a lightweight middleware framework, illus-
trated in Fig. 2. The system includes several intercon-
nected modules within the Mass XT Security Layer,
ensuring robust communication and interaction be-
tween service layers. Core components such as the
XT Security Server, Ticketing Service, and Service
Adapter enable essential functionalities, including se-
cure data exchange, ticketing management, and inte-
grating external add-on services. The Message Queue
facilitates reliable and asynchronous communication
between modules, ensuring seamless operations. It
includes a UI Service for user interfaces and a Rout-
ing Service for route optimization, connecting users
to various transport solutions. The platform integrates
AVs, public transport, and last-mile options such as
e-scooters. The Routing Engine and Transport Ser-
vice components work together to address mobility
demands dynamically. A key characteristic of the pro-
posed concept is its open-source nature and openly
documented interface descriptions. This openness fa-
cilitates the integration of additional functional mod-
ules, such as those required for Industry 5.0-specific
industrial interfacing with the general MaaS ecosys-
tem.
Add-on services can be seamlessly integrated
through the Service Adapter, which employs a stan-
dardized specification for unified message exchange
structures. This enables consistent and reliable com-
munication between the MaaS XT system and supple-
mentary modules.
In the context of Industry 5.0, the add-on ser-
vice is envisioned as a system that connects avail-
able transport services, including last-mile AVs, to
industrial processes. The proposed concept links an
AV shuttle fleet with factory operations, enabling the
scheduling and planning of routes, as well as effi-
cient fleet management. A fleet of AV shuttles is or-
chestrated through a cloud-based fleet management
solution, which is interconnected with manufactur-
ing processes. This system predicts and dynami-
cally manages demand-based AV shuttle routing ac-
cording to workforce movement needs within the fac-
tory premises, such as transportation between differ-
ent production units in the factory area.
This approach demonstrates the potential of the
MaaS XT system to seamlessly integrate mobility so-
lutions with industrial processes, thereby enhancing
operational efficiency and supporting the principles of
Industry 5.0
3 METHODOLOGY FOR
CREATING DIGITAL TWINS IN
INDUSTRY 5.0
3.1 Realistic Environment Creation
Creating realistic environments is pivotal in validat-
ing AVs for Industry 5.0, where human-centric and
sustainable systems are paramount. Digital twin tech-
nology plays a crucial role in replicating real-world
scenarios with high fidelity, enabling precise valida-
tion processes (Hu et al., 2024). Digital twinning
enables us to simulate diverse environments like ur-
ban streets, industrial sites, and campuses. Game en-
gines like Unity and Unreal allow the generation of
complex environments and scenarios, including vary-
ing weather conditions, traffic density, and pedestrian
interactions, which are essential for testing the ro-
bustness of AV decision-making algorithms(Chance
et al., 2022) (Michal
´
ık et al., 2021). These simula-
tions replicate static elements, such as road layouts
and signage, and dynamic elements, such as vehicle
movement and human behavior, ensuring comprehen-
sive validation.
Virtual environment creation for AV validation
can be achieved through two main approaches. The
Figure 3: Building a virtual environment by aerial imaging
and processing to obtain a 3D virtual terrain.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
662

Figure 4: Large-scale residential area converted to a virtual
environment usable for high-fidelity AV simulation terrain.
first involves processing aerial imagery with georefer-
enced data to automatically generate 3D terrains suit-
able for simulation (see Fig. 3). This method (Malay-
jerdi et al., 2020) efficiently replicates large-scale en-
vironments, including topographical and infrastruc-
tural details. While this approach offers automation
and scalability, the resulting environments may lack
the refined appearance for high-fidelity simulations.
The second approach utilizes pre-made urban fea-
tures and vegetation to replicate real-world elements
more precisely and visually appealingly (see Fig. 4).
This method allows for greater control over the en-
vironment’s aesthetic and functional details but re-
quires more manual work. However, modern tools
like RoadRunner simplify this process significantly,
enabling users to design detailed virtual environments
and export them seamlessly into game-engine-based
high-fidelity simulators, enhancing the realism and
utility of AV validation scenarios (Pikner et al., 2024).
3.2 Shuttle Modelling
Within the virtual environment engine, vehicles are
modeled with varying levels of detail to serve differ-
ent simulation purposes. A basic cuboid 3D mesh
model is used to calculate collisions and define the ve-
hicle’s physical boundaries. For sensor simulations,
such as LiDAR or radar, a more intricate 3D model
is designed to support raycasting and ensure accu-
rate detection interactions. Finally, the most detailed
model focuses on the vehicle’s appearance, captur-
ing its external design for visual realism. These three
models are integrated into the simulation software to
collectively define the vehicle’s physical, sensory, and
visual properties, enabling comprehensive and realis-
tic testing. Fig. 5 shows these three models for the
iseAuto shuttle (Sell et al., 2024).
3.3 Simulation Concept
After the virtual environment and the desired vehi-
cle model are prepared, the next step is the evaluation
process, which involves three main stages as shown
in Fig. 6: scenario generation, simulation execution,
and result analysis.
Scenario generation: This is the initial stage
Figure 5: Three different models for a vehicle to be config-
ured inside the simulation engine. Physical, Sensory, and
visual mesh are the three mesh models needed for the vehi-
cle model-building process.
where realistic test cases are designed to replicate
various operational design domains (ODDs). These
scenarios consider diverse factors, including road ge-
ometries, environmental conditions, traffic patterns,
and pedestrian interactions. By creating functional,
logical, and concrete scenarios, the system can ad-
dress both standard and edge-case situations that AVs
may encounter.
Simulation execution: The second stage can uti-
lize a range of low- (Medrano-Berumen et al., 2020)
to high-fidelity simulators (Dosovitskiy et al., 2017).
Based on this choice, the software-in-the-loop (SiL)
(Umang et al., 2024) or hardware-in-the-loop (HiL)
method can be configured accordingly. SiL simu-
lations test the software stack, including perception,
decision-making, and control algorithms, within a
fully virtual environment. This allows for rapid itera-
tion and debugging. In contrast, HiL simulations in-
corporate physical hardware, such as controllers and
sensors, into the virtual setup. This hybrid approach
ensures that hardware and software interact seam-
lessly under real-time conditions, providing a more
holistic system evaluation (Sarhadi and Yousefpour,
2015).
Result analysis: The final stage involves assess-
ing the performance and safety of the AV based on
simulation outcomes. Metrics such as collision rates,
trajectory adherence, response times, and other per-
formance metrics are evaluated to identify potential
weaknesses or areas for improvement. Advanced an-
Figure 6: The validation process for AVs: scenario genera-
tion, simulation execution, and result analysis.
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation
663

alytics and visualization tools are often employed to
gain deeper insights into system behavior, enabling
targeted refinements. These three stages form a robust
framework for validating and optimizing AV systems
in diverse and complex scenarios.
4 VALIDATION
In the validation framework for AVs, two distinct lev-
els of validation are essential: high-level validation
and low-level validation(Pikner et al., 2024; Malay-
jerdi et al., 2021).
High-level validation focuses on testing the core
autonomous algorithms that operate at the software
level of the vehicle. These include critical modules
such as localization, detection, and planning. Local-
ization ensures the vehicle accurately determines its
position in the environment, detection identifies ob-
stacles and interprets sensory inputs, and planning
determines safe and efficient routes for navigation.
This level of validation is typically conducted using
SiL simulations, which provide a virtual environment
for testing these algorithms without requiring physi-
cal hardware. By simulating various operational de-
sign domains (ODDs), high-level validation ensures
that the software can perform reliably under diverse
and challenging conditions.
Low-level validation, on the other hand, ad-
dresses the vehicle’s control systems that manage
hardware-specific tasks such as driving, steering, and
braking. These systems operate through a Controller
Area Network (CAN) that facilitates communication
between the vehicle’s low-level components. Vali-
dation at this level involves ensuring that the drive
controllers, steering actuators, and other hardware el-
ements function correctly and respond appropriately
to commands from the high-level system. Low-level
validation can be conducted entirely in simulation,
replicating the physical controllers virtually, or by in-
tegrating the physical hardware into the simulation
framework using HiL setups. This integration bridges
the gap between the digital and physical domains, en-
abling comprehensive testing of software and hard-
ware systems in unison.
Together, high-level and low-level validation form
a robust methodology for assessing AV systems’
safety, reliability, and performance. This two-tiered
approach ensures that the vehicle operates effectively
in real-world conditions by addressing both the soft-
ware and hardware aspects. A Separate case study has
been conducted and covered in (Pikner et al., 2022;
Sell et al., 2022).
5 INDUSTRIAL USE CASE OF
TRANSPORTATION AS A
SERVICE
Transport as a Service (TaaS) represents a transforma-
tive shift in mobility, moving away from traditional
vehicle ownership toward a seamless, on-demand,
and subscription-based transportation model. By
leveraging advanced technologies such as artificial in-
telligence (AI), the Internet of Things (IoT), and data
analytics, TaaS platforms enable users to plan, book,
and pay for transportation services through digital in-
terfaces, creating a more efficient, affordable, and sus-
tainable ecosystem. MaaS and TaaS might seem sim-
ilar on a first glance they differ in their scope, focus,
and operational approach. While MaaS focuses on
integrating and streamlining access to multiple modes
of transportation, TaaS emphasizes providing a single,
efficient transport service as an alternative to owner-
ship. Both are components of the broader shift toward
shared, efficient, and sustainable mobility solutions.
This model aligns with global trends emphasizing
shared economies, digital transformation, and envi-
ronmental responsibility. It is a key enabler of smart
cities and modern lifestyles, offering solutions for
commuters, tourists, and businesses seeking efficient
logistics.
The Volvo Autonomous Solution (V.A.S) at Volvo
Group is at the forefront of TaaS innovation, redefin-
ing mobility and logistics with a focus on safety, sus-
tainability, and efficiency (Pisarov and Mester, 2021).
Volvo’s approach extends beyond autonomous trucks
or machinery to encompass a fully integrated au-
tonomous transport ecosystem tailored to customer
needs (Volvo Autonomous Solutions, 2025).
Key features of Volvo’s TaaS solutions include:
• Advanced Autonomous Transport Systems: Oper-
ating in quarries, mines, and highways, Volvo’s
systems utilize a ”virtual driver,” a system devel-
oped in-house or with partners like Aurora. These
systems manage dynamic driving tasks in prede-
fined environments.
• High-Integrity AVs: Purpose-built or adapted
for autonomous operations, these vehicles are
equipped with robust systems ensuring safety and
reliability.
• Comprehensive Fleet Management: offering
end-to-end control over operations, integrating
seamlessly with existing Transportation Manage-
ment System (TMS), Fleet Management System
(FMS), or Enterprise Resource Planning (ERP)
systems for optimal performance (Rensfeldt and
Kniele, 2024).
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
664

Developing a TaaS solution requires consideration
of several key areas, including standards, efficiency,
and the integration of digital twin technology. Volvo’s
TaaS framework exemplifies the principles of Indus-
try 5.0, focusing on human-centric, sustainable, and
resilient systems. Unlike Industry 4.0, which empha-
sizes IoT, AI, and automation, Industry 5.0 prioritizes
collaboration between advanced technologies and hu-
man operators. Volvo’s solutions complement human
Figure 7: Developing a Digital Twin for TaaS in V.A.S.
capabilities by enhancing safety and efficiency in haz-
ardous environments like quarries or mines highlight-
ing its human-centric design principle. Autonomous
systems handle repetitive tasks, allowing human oper-
ators to focus on higher-value activities. By integrat-
ing electric and AVs, optimizing transport flows, and
minimizing resource wastage, Volvo’s TaaS solutions
contribute to greener supply chains and reduced envi-
ronmental impact. These efforts align with global sus-
tainability goals. Simultaneously, Volvo Autonomous
Solutions (V.A.S.) has established an internal simula-
tion platform to conduct hardware-in-the-loop (HIL)
and software-in-the-loop (SIL) testing, utilizing dig-
ital twins of sites and vehicles/machines. This ap-
proach reduces lead times for software development
and verification while optimizing the use of physical
resources, including machines, personnel, and test fa-
cilities. The V.A.S foster innovation and customiza-
tion, while its tailored solutions address the unique
needs of each client, ensuring optimal performance
and adaptability across industries (Fig. 7).
Volvo’s TaaS system architecture (Fig. 8) consists
of five primary subsystems:
• Site Control and monitoring: Centralized man-
agement and supervision of the fleet, support sys-
tems, and safety protocols.
• Driver: In-house systems that execute site control
instructions and plan movements.
• Autonomy-Enabled Machine/Vehicle: Vehicles
equipped with advanced autonomous capabilities.
• Safety: Emergency stops, barriers, and integrated
safety protocols.
• Infrastructure: Supporting systems, including
connectivity, GNSS, loading equipment, and
Figure 8: V.A.S TaaS System high-level Architecture with
five subsystems.
charging stations.
By embedding Industry 5.0 principles into its
TaaS framework, Volvo Group is driving innovation,
reducing environmental impact, and enhancing indus-
trial resilience. Its human-centric, sustainable ap-
proach is paving the way for a future where tech-
nology and ingenuity converge to revolutionize trans-
portation.
5.1 Experimental Pilots
To bridge the gap between theoretical modeling and
practical application, the proposed digital twin frame-
work was validated through real-world pilot studies
involving AV shuttles and autonomous freight trans-
port operations. These pilot deployments provided
valuable data to enhance the accuracy of digital twin
simulations, ensuring that the methodology remains
grounded in practical, real-world conditions. The
collected data enabled refinements in environmen-
tal modeling, sensor fusion, and the interaction be-
tween autonomous systems and human-operated in-
frastructure. This section presents two experimental
use cases: one focusing on MaaS in urban mobility
and another exploring TaaS in logistics and industrial
automation.
5.1.1 MaaS Integration
The AV shuttle experiment was conducted in two
distinct locations, focusing on testing the interaction
between the AV system and its surrounding infras-
tructure within the MaaS XT platform. The Tallinn
Sadama pilot (see Fig. 9), situated in a highly dynamic
urban setting, assessed system compatibility and data
exchange within a larger digital ecosystem. Mean-
while, in the Rae suburban area, an AV shuttle oper-
ated within a predefined service area, collecting di-
verse environmental and operational data to support
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation
665

Figure 9: Rae pilot with iseAuto AV shuttle (top) and
Tallinna Sadam pilot with Navya EVO AV shuttle (bottom).
Figure 10: Autonomous Operations for DHL Supply Chain.
real-time mobility solutions. The open-data platform
created during this pilot study served as a continuous
feedback loop, improving the digital twin’s predictive
modeling capabilities.
By incorporating real-world AV sensor data, the
digital twin was enhanced to simulate dynamic road
conditions, pedestrian presence, and vehicle interac-
tions more accurately. The integration of this pi-
lot data strengthened the validation process by ensur-
ing that the digital twin could simulate and analyze
safety-critical scenarios in MaaS ecosystems. The ap-
proach aligns with Industry 5.0 principles by creating
a human-centric, resilient, and data-driven mobility
framework that enhances adaptive transport planning
and decision-making.
5.1.2 TaaS for Industrial Logistics
Beyond urban mobility, the digital twin framework
was validated in TaaS applications, particularly in au-
tonomous freight transportation and industrial logis-
tics. The V.A.S. and DHL Supply Chain project ex-
emplifies the implementation of autonomous trucking
in logistics networks, improving efficiency and reduc-
ing operational costs (Fig. 10). This experiment pro-
vided insights into integrating autonomous freight op-
erations within the digital twin, enabling predictive
modeling for route optimization, vehicle maintenance
forecasting, and operational safety assessments.
Additionally, autonomous transport solutions in
the mining industry were explored as another TaaS
application. The Boliden mining project leveraged
autonomous truck operations to enhance safety and
efficiency in mining logistics, adapting infrastructure
for autonomous haulage systems. Digital twin mod-
els utilized real-world mining transport data, improv-
ing terrain modeling, vehicle path optimization, and
hazard detection in extreme environments.
Both experiments illustrate the scalability of digi-
tal twin methodologies across different industrial do-
mains. By integrating real-world operational data,
this research demonstrates the practical applicabil-
ity of digital twins in optimizing AV ecosystems for
future smart cities and industrial automation frame-
works.
6 CONCLUSIONS
This paper explores the concept of Industry 5.0 in re-
lation to automated driving and transportation, high-
lighting advanced collaboration between humans and
robots. As robots and automated systems transition
from constrained industrial environments to open,
shared spaces, emphasis must be placed on ensur-
ing seamless coexistence between humans and robots.
The paper presents an integrated approach to lever-
aging automated driving within the MaaS ecosystem
and underscores its applicability through an industri-
ally relevant use case.
While the proposed approach shows significant
potential in integrating automated driving within the
MaaS ecosystem, certain limitations need to be ad-
dressed. These include challenges in ensuring safety
and trust in mixed human-robot environments, scala-
bility of solutions across different urban settings, and
the adaptation of automated systems to diverse user
needs and behaviors. Additionally, the reliance on ro-
bust communication infrastructures and data privacy
concerns present hurdles for widespread adoption.
To mitigate these challenges, extending validation
and verification activities plays a critical role in ad-
dressing safety and reliability concerns. However,
such efforts demand significant resources and a col-
laborative commitment across stakeholders, includ-
ing academia, industry, and regulatory bodies. Fur-
thermore, extensive real-world testing and validation
across varied scenarios can provide valuable insights
to refine the framework and expand its industrial ap-
plications
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
666

ACKNOWLEDGMENT
This research has supported by the EU Horizon 2020
Research and Innovation Programme, grant agree-
ment No. 856602 and Horizon Europe project No.
101057369.
REFERENCES
Alves, J., Lima, T. M., and Gaspar, P. D. (2023). Is industry
5.0 a human-centred approach? a systematic review.
Processes, 11(1):193.
Chance, G., Ghobrial, A., McAreavey, K., Lemaignan, S.,
Pipe, T., and Eder, K. (2022). On determinism of
game engines used for simulation-based autonomous
vehicle verification. IEEE Transactions on Intelligent
Transportation Systems, 23(11):20538–20552.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on robot learning, pages 1–16.
PMLR.
Hensher, D. A., Mulley, C., Ho, C., Wong, Y., Smith, G.,
and Nelson, J. D. (2020). Understanding Mobility as
a Service (MaaS): Past, present and future. Elsevier.
Hu, X., Li, S., Huang, T., Tang, B., Huai, R., and Chen,
L. (2024). How simulation helps autonomous driving:
A survey of sim2real, digital twins, and parallel in-
telligence. IEEE Transactions on Intelligent Vehicles,
9(1):593–612.
Kalda, K., Pizzagalli, S.-L., Soe, R.-M., Sell, R., and Bel-
lone, M. (2022). Language of driving for autonomous
vehicles. Applied Sciences, 12(11):5406.
Kalda, K., Sell, R., and Kivim
¨
ae, M. (2024). Enhancing
mobility as a service with autonomous last-mile shut-
tles and data exchange layer for public transport. In
AIP Conference Proceedings, volume 2989.
Malayjerdi, M., Baykara, B. C., Sell, R., and Malayjerdi,
E. (2021). Autonomous vehicle safety evaluation
through a high-fidelity simulation approach. Proceed-
ings of the Estonian Academy of Sciences, 70(4):413–
421.
Malayjerdi, M., Kuts, V., Sell, R., Otto, T., and Baykara,
B. C. (2020). Virtual simulations environment devel-
opment for autonomous vehicles interaction. In ASME
International Mechanical Engineering Congress and
Exposition, volume 84492, page V02BT02A009.
American Society of Mechanical Engineers.
Medrano-Berumen, C., Malayjerdi, M., Akbas¸, M.
˙
I., Sell,
R., and Razdan, R. (2020). Development of a Valida-
tion Regime for an Autonomous Campus Shuttle. In
IEEE SoutheastCon, pages 1–8.
Michal
´
ık, D., Jirgl, M., Arm, J., and Fiedler, P. (2021).
Developing an unreal engine 4-based vehicle driving
simulator applicable in driver behavior analysis—a
technical perspective. Safety, 7(2):25.
Paide, K., Pappel, I., Vainsalu, H., and Draheim, D. (2018).
On the systematic exploitation of the estonian data ex-
change layer x-road for strengthening public-private
partnerships. In proceedings of the 11th international
conference on theory and practice of electronic gov-
ernance, pages 34–41.
Pikner, H., Malayjerdi, M., Bellone, M., and Sell, R. (2024).
Autonomous driving validation and verification using
digital twins. In International Conference on Vehi-
cle Technology and Intelligent Transport Systems (VE-
HITS), pages 204–211.
Pikner, H., Sell, R., Majak, J., and Karjust, K. (2022).
Safety system assessment case study of automated ve-
hicle shuttle. Electronics, 11:1162.
Pisarov, J. L. and Mester, G. (2021). The use of autonomous
vehicles in transportation. Tehnika, 76(2):171–177.
Rensfeldt, S. and Kniele, L. (2024). Navigating global sup-
ply chain disruptions: A case study of volvo trucks for
enhanced resilience and risk management in the auto-
motive sector.
Roberts, A., Maennel, O., and Snetkov, N. (2021). Cyber-
security test range for autonomous vehicle shuttles. In
2021 IEEE European Symposium on Security and Pri-
vacy Workshops (EuroS&PW), pages 239–248.
Roberts, A., Malayjerdi, M., Bellone, M., Maennel, O.,
and Malayjerdi, E. (2023). Analysing adversarial
threats to rule-based local-planning algorithms for au-
tonomous driving. In Network and Distributed System
Security (NDSS) Symposium.
Robles, G., Gamalielsson, J., and Lundell, B. (2019).
Setting up government 3.0 solutions based on open
source software: the case of x-road. In Electronic
Government: 18th IFIP WG 8.5 International Con-
ference, EGOV 2019, San Benedetto Del Tronto, Italy,
September 2–4, 2019, Proceedings 18, pages 69–81.
Springer.
Sarhadi, P. and Yousefpour, S. (2015). State of the art: hard-
ware in the loop modeling and simulation with its ap-
plications in design, development and implementation
of system and control software. International Journal
of Dynamics and Control, 3:470–479.
Sell, R., Malayjerdi, E., Malayjerdi, M., and Baykara, B. C.
(2022). Safety toolkit for automated vehicle shuttle
- practical implementation of digital twin. In 2022
International Conference on Connected Vehicle and
Expo (ICCVE), pages 1–6.
Sell, R., Malayjerdi, M., Pikner, H., Razdan, R., Malay-
jerdi, E., and Bellone, M. (2024). Open-source level
4 autonomous shuttle for last-mile mobility. In 2024
IEEE 29th International Conference on Emerging
Technologies and Factory Automation (ETFA), pages
01–06. IEEE.
Slamnik-Krije
ˇ
storac, N., Yilma, G. M., Liebsch, M.,
Yousaf, F. Z., and Marquez-Barja, J. M. (2023). Col-
laborative orchestration of multi-domain edges from
a connected, cooperative and automated mobility
(ccam) perspective. IEEE Transactions on Mobile
Computing, 22(4):2001–2020.
Umang, G. S. R., Shivanandaswamy, K. K., Pallavi, S.,
and Rajagopal, S. (2024). Software-in-the-loop (sil)
method. In Proceedings of the 10th International
Conference on Mechanical, Automotive and Materi-
als Engineering: CMAME 2023, 20–22 December, Da
Nang, Vietnam, page 243. Springer Nature.
Volvo Autonomous Solutions (2025). Autonomous trans-
port solution by volvo. Accessed: 2025-01-19.
Autonomous Vehicle for Industry 5.0: Digital Twin for System Safety Validation
667
