
Maude Strategies-Based SoSs Workflow Modeling
Charaf Eddine Dridi
1,2 a
, Nabil Hameurlain
1 b
and Faiza Belala
2 c
1
LIUPPA Laboratory, University of Pau, Pau, France
2
LIRE Laboratory, Constantine 2 University – Abdelhamid Mehri, Constantine, Algeria
Keywords:
SoS, Missions, Management Strategies, Workflow, Maude Language, Formal Modeling and Verification.
Abstract:
Systems of Systems (SoSs) are large-scale, complex, and occasionally critical software systems. They emerge
from the integration of autonomous, heterogeneous, and evolving Constituent Systems (CSs) that collaborate
to fulfill operational missions and provide functionalities that exceed those of individual systems. The mod-
eling, simulation, and analysis of SoSs are challenging due to complexities such as temporal constraints on
missions and the emergence of both desired and unwanted behaviors within CSs. In this paper, we propose a
formal-based solution to specify and validate the functional behavior of SoSs. We employ the Maude Strategy
language, a rewriting logic-based language to define the operational semantics of these systems. This includes
implementing a set of strategies for managing mission execution, which aim to enhance the SoS workflow
by avoiding undesirable behaviors and promoting desirable ones. Our approach offers an executable solution
for these strategies and validates the SoS behavior using model-checking techniques provided by Maude. To
demonstrate its applicability, the approach is illustrated with a case study of a French Emergency SoS.
1 INTRODUCTION
Systems-of-Systems (SoSs) have experienced signif-
icant attention from the computer science commu-
nity due to their evolutionary progress and ability to
integrate multiple Constituent Systems (CSs) from
diverse domains, including healthcare, military de-
fense, energy grids, and emergency management. An
SoS consists of distributed and complex CSs that
collaborate within a network structure, leveraging
their diverse physical and functional characteristics to
achieve a global capability that surpasses what each
CS could achieve individually (Maier, 1998).
1.1 Context and Problematic
SoSs can take four different types (Maier, 1998): Di-
rected (with a centrally managed purpose and central
ownership of all CSs), Virtual (lack of central purpose
and central alignment), Collaborative (with voluntary
interactions of CSs to achieve a goal), and Acknowl-
edged (independent ownership of the CSs). Subse-
quently, the definition of SoSs is introduced based on
a
https://orcid.org/0000-0001-5724-8187
b
https://orcid.org/0000-0003-3311-4146
c
https://orcid.org/0000-0002-4563-4061
the key consideration that SoSs are more than simply
a set of connected CSs sharing data and offering mis-
sions; it also defines the logical structure and behavior
of qualitative/quantitative features involved in SoSs,
whose CSs can have their operational/managerial in-
dependence and whose emergent behavior is aligned
with missions’ execution.
In time-aware missioned SoSs, two critical as-
pects based on quantitative priorities can govern the
success of mission achievement: temporal constraints
and self-management of workflows (Dridi et al.,
2022)(Dridi et al., 2023)(Halima et al., 2021)(Maa-
mar et al., 2016):
• The first aspect addresses the complexities of time
constraints and explores how various time-related
properties (e.g., mission duration, deadlines, etc.)
affect the overall execution of each mission. Es-
pecially in critical and emergency applications,
missions of various CSs are required to be exe-
cuted in real-time and accomplished within spe-
cific amounts of time. This property influences
the starting, execution, and completion time of
missions, where a violated constraint can result in
a disaster.
• The second aspect self-manages the Workflows
(WFs) of missions. This requires analyzing, plan-
ning and executing the series of missions (or func-
316
Dridi, C. E., Hameurlain, N. and Belala, F.
Maude Strategies-Based SoSs Workflow Modeling.
DOI: 10.5220/0013481800003928
In Proceedings of the 20th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2025), pages 316-327
ISBN: 978-989-758-742-9; ISSN: 2184-4895
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
tional chains of missions) required to reach a spe-
cific mission. The goal of workflow manage-
ment is to ensure that the global mission of an
SoS is completed correctly, consistently, and ef-
ficiently. Understanding the temporal constraints
of missions and their dependencies is essential for
achieving functional missions, maintaining situa-
tional awareness, and ensuring system success.
The main questions we intent to address in this
paper are: I) How to thoroughly express and ensure
properties regarding SoSs requirements and charac-
teristics, while continuously evolving during runtime.
II) How to define behaviors related to quantitative as-
pects such as time of SoSs and their management. III)
How to ensure a strategic management of the execu-
tion of the different missions in SoSs’ WFs. IV) How
to ensure the autonomous executability of the desired
behaviors and verify their correctness. Therefore,
the main goal of our formal approach is to provide
a formal design and specification of the SoSs’ self-
managed behaviors and express quantitative proper-
ties over these behaviors that can be formally verified.
1.2 Contribution
Formal methods present the appropriate mechanisms
to address behavioral issues and the complexity inher-
ent in SoS architectures. They are rigorous and rely
on formal logic and operational semantics. In this
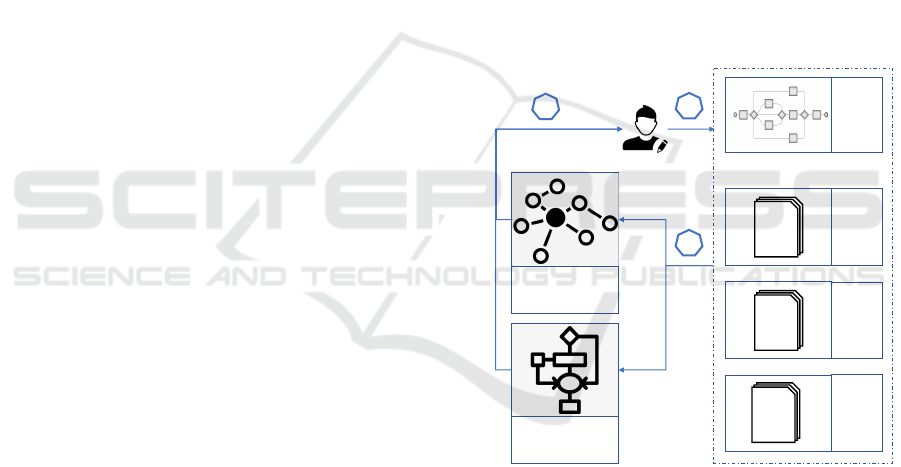
paper, we propose a formal approach for modeling
and analysis of time-aware SoSs and their WFs self-
management (Figure 1). More precisely, we aim to
facilitate the selection and execution of the best Func-
tional Chain (FC), which represents the best path of
sequenced missions leading to the final mission. To
this end, we employ a set of rules and strategies that
evaluate the entire WF: (1) the rules use conditional
equations to prioritize missions based on time con-
straints during their execution. These rules classify
missions into two categories, “Primary” or “Alterna-
tive,” allowing the system to focus on selecting only
the primary choices. (2) The strategies manage the ex-
ecution of prioritized missions composing the optimal
FC. They guide and govern the selection of rules to
avoid the execution of unwanted behaviors (i.e., states
characterized by violations, conflicts, or unwanted ac-
tions) representing the alternative missions and en-
force rules leading to the desired behavior, described
by primary missions.
The approach is based on the formal specifica-
tion language Maude Strategy and its tools (
¨
Olveczky,
2004), including a model-checker for formal verifica-
tion (
¨
Olveczky, 2004). The choice of this language
can be argued by several reasons:
• The strong expressivity of the language to model
SoSs in terms of structure (i.e., the WF structure
and its FCs) and its components such as CSs, mis-
sions, and their temporal attributes (e.g., time, de-
lays, deadlines, etc.).
• The executability of its rewriting logic semantics
allows the implementation of conditional rules,
such as prioritizing primary missions over the al-
ternative ones in terms of time.
• The language and semantics support strategies,
which allow for mechanisms to guide and spec-
ify which rule should be executed and under what
conditions.
• Maude provides a bounded model-checking of
logical properties represented in terms of com-
bined patterns/invariants expressing specific SoS
application requirements, which is relevant to
study the managed SoS environment temporal
evolution.
Modeling
Analysis
Feedback
1
Mission,
temporal
constraints,
WF, FCs
- Struct.
Syntax
- Cond.
Equations
Self-
management
strategies
Prioritization
rules
*.fm
*.maude
*.maude
Model-check: state
properties
Simulation: monitor
self-management
strategies
2
3
Figure 1: Proposed approach for self-managed SoSs.
Formally, the Maude-based specifications
(
¨
Olveczky, 2004) (Rubio et al., 2021) (Mart
´
ı-Oliet
and Meseguer, 1996) provide a powerful semantic
framework for modeling and analyzing the behavior
of workflows, making them ideal for validating and
simulating the quantitative aspects of WF design.
The approach defines operational semantics, condi-
tional equations, rules, and management strategies
to capture the dynamic behavior of the SoS and to
provide an executable specification. Therefore The
approach supports two main aspects of analysis: sim-
ulation/monitoring and formal verification. Using the
Maude rewriting engine and built-in model-checker,
the system’s state evolution can be monitored to
Maude Strategies-Based SoSs Workflow Modeling
317

ensure the correct execution of self-management
strategies.
1.3 Paper Structure
The remainder of the paper is structured as follows:
Section 2 introduces our case study, FESoS, and out-
lines various components of an SoS. Section 3 pro-
vides an overview of rewriting theory and the Maude
strategy language. Section 4 explores the static and
dynamic aspects of the workflow. Section 5 focuses
on implementing self-management strategies to pro-
mote desired behaviors and mitigate unwanted ones.
Section 6 discusses the practical application and val-
idation of our approach. Section 7 reviews related
works, and Section 8 provides a summary and con-
clusion of the paper.
2 MOTIVATING EXAMPLE
The case study explores the FESoS (Petitdemange
et al., 2018) which aims to protect people and prop-
erty. The FESoS consists of several interconnected
CSs, and Missions. The MonitoringSoS, SAMU,
Hospital CS, Civil Security, SDIS35, Search and
Rescue Teams (SRT), and Fire and Rescue Ser-
vices (FRS) are all part of the FESoS. In a possi-
ble situation, a major fire breaks out in a populated
area, posing a significant threat to the safety of peo-
ple and property. The FESoS is triggered to re-
spond to this emergency. The MonitoringSoS deploys
UnmannedAerialVehicles (UAVs) for Aerial Surveil-
lance. The Wireless Sensor Net CS (WSNCS) con-
ducts Environmental Monitoring of different environ-
mental factors e.g. to assess air quality, temperature,
etc. The CODIS35 controller oversees operations, an-
alyzes data and coordinates resources. The SAMU
is tasked with two missions: Patient Evacuation and
Patient Transportation. TheHospitalCS activates its
Emergency Reception and Triage to receive and as-
sess the incoming patients. The Medical Treatment
provides necessary medical interventions. Civil Secu-
rity takes charge of Emergency Response Coordina-
tion managing communication and coordination be-
tween all involved entities. SDIS35 and SDIS56, the
fire-fighting and emergency response organizations,
implement their respective missions to contain and
extinguish the fire. SRT conduct Rapid Assessment
and Search Operations to locate and rescue individu-
als trapped or stranded due to the fire. FRS engages in
Fire Suppression and Control, ensuring the fire does
not spread further. They also handle Hazardous Ma-
terial Handling and Containment and Structural As-
sessment and Collapse Rescue if needed.
The effective coordination of response efforts
within the FESoS serves as a motivating example for
the necessity of self-control mechanisms and strate-
gic prioritization rules based on time. The dynamic
nature of emergency scenarios, such as civilian evac-
uation, fire suppression, and medical response, re-
quires the use of real-time data to sequence and pri-
oritize missions effectively and ensure a coordinated
response (see Figure 2). In this context, the adop-
tion of strategies and rules focused on temporal pri-
oritization becomes critical. These strategies ensure
that time-sensitive missions are executed in the ap-
propriate sequence while avoiding unwanted behav-
iors such as delays, premature starts, or extended du-
rations. By leveraging temporal interdependencies,
the system can dynamically adjust workflows to ad-
dress evolving conditions and meet strict time con-
straints. Integrating temporal prioritization strategies
into the logical architecture model not only enhances
the understanding of FESoS behavior but also facil-
itates the design of an effective emergency response
system. Such a system must dynamically adapt to
time-critical requirements, ensuring the smooth exe-
cution of missions while avoiding unwanted behav-
iors, and optimizing the overall impact of the FESoS.
3 OVERVIEW ON MAUDE
LANGUAGE
The utilization of Maude as a declarative language be-
comes relevant. Maude’s expressive nature in equa-
tional and rewriting logic aligns with our need for a
powerful language to support programming, formal
specification execution, and formal analysis and ver-
ification (
¨
Olveczky, 2004). By leveraging Maude’s
concurrent rewriting capabilities and equational struc-
tural axioms, we can logically deduce and reason
about the behavior of the system under consideration.
In the context of our paper on temporal mission
priorities and states, the modules in Maude, along
with their rewriting theory, denoted as a tuple R =
(Σ, E ∪ A, R), play a crucial role. These modules pro-
vide a formal and structured representation of the sys-
tem’s behavior and transitions, incorporating tempo-
ral aspects.
The equational theory part of the modules, rep-
resented by (Σ, E ∪ A), encompasses the signature
Σ = (S,C, <, F, M), which includes:
• Sorts and Subsorts (S): Representing the types
and hierarchies of temporal entities in the system.
• Class Names (C): Defining the classifications of
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
318
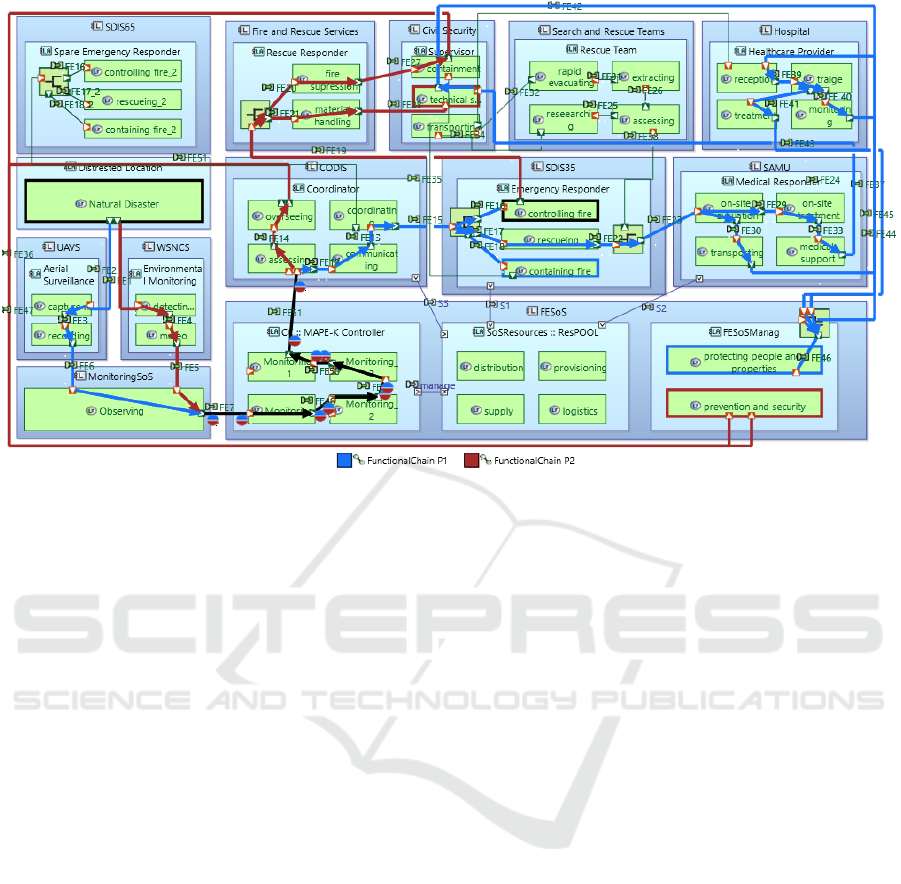
Figure 2: Overview of the Logical Architecture model of FESoS.
missions within the workflow.
• Subclass Relation (<): Structuring hierarchies
among class names.
• Functions and Messages (F, M): Enabling inter-
actions and operations on missions.
The set E denotes equations and membership
tests, some of which can be conditional, while A rep-
resents equational axioms associated with specific op-
erators in the signature Σ. The tuple R consists of both
conditional and nonconditional rewrite rules, captur-
ing the dynamic behavior of missions over time.
The specification of the proposed formal approach
is based on the operational semantics of different el-
ements of SoSs’ workflows using Maude. In its ba-
sic form, the latter is equipped with two types of
modules: functional modules and system modules.
By using the extension of the Strategy Language for
Maude, we add the strategies’ module to formalize
the semantics of the self-management approach. The
three types of modules are summarized below:
• Functional Module: Specifies the static part of
a specified SoS as a theory in membership equa-
tional logic as a pair (Σ, E ∪ A), where:
– Σ specifies the type structure (sorts, subsorts,
operators, etc.).
– E is the collection of possibly conditional equa-
tions.
– A is a collection of equational attributes for the
operators (e.g., associative, commutative).
• System Module: Specifies the dynamics of the
implemented SoS as a rewrite theory represented
as a triple (Σ, E ∪ A, R), where:
– (Σ, E ∪ A) is the module’s equational theory
part.
– R is a collection of possibly conditional rewrite
rules that describe the system’s dynamic behav-
ior.
• Strategy Module: Defines a set of strategies
that control and guide the application of rewriting
rules in Maude as (Σ, E ∪ A, S(R, SM)), where:
– (Σ, E ∪ A) represents the equational theory of
the system.
– SM is a semantics describing the behavior of a
system, constructed from:
*
R: A set of rewriting rules.
*
S: A strategy module guiding the rewriting
and application of these rules.
The different modules can be implemented using
an object-oriented specification, encompassing ob-
jects, messages, classes, and inheritance. Concurrent
systems are modeled as a multiset of juxtaposed ob-
jects and messages, where interactions between ob-
jects are governed by rewrite rules.
An object is represented as:
< O : C |a
1
: v
1
, ..., a
n
: v
n
>,
where O is the object name, an instance of class C, a
i
are attribute identifiers, and v
i
are their corresponding
values, for i = 1...n.
Maude Strategies-Based SoSs Workflow Modeling
319
Class declarations follow the syntax:
class < C |a
1
: s
1
, ..., a
n
: s
n
>,
where C is the class name, and s
i
are sorts for attribute
a
i
. Subclasses can also be declared, making use of
inheritance. Messages are declared using the keyword
msg.
4 FORMAL MODELING SOS’ WF
In this section, we focus on the initial step of estab-
lishing formal definitions and semantics for our ap-
proach. This involves specifying and defining the
attributes and properties of missions. WFs describe
the sequence and organization of interconnected mis-
sions aimed at completing specific goals, while func-
tional chains represent a more specific path of mis-
sions that ensure the goal is accomplished. The func-
tional chains present the desired behaviors, which re-
fer to the intended actions and mission executions that
align with the system’s objectives, facilitating effec-
tive workflows of missions and achievement of goals.
Conversely, unwanted behaviors represent actions or
outcomes that deviate from planned intentions and
potentially lead to inefficiencies or conflicts within
the SoS’ workflows. In this section, we present the
operational semantics of both static entities and dy-
namic behavior describing the workflow specified us-
ing the Maude rewriting language.
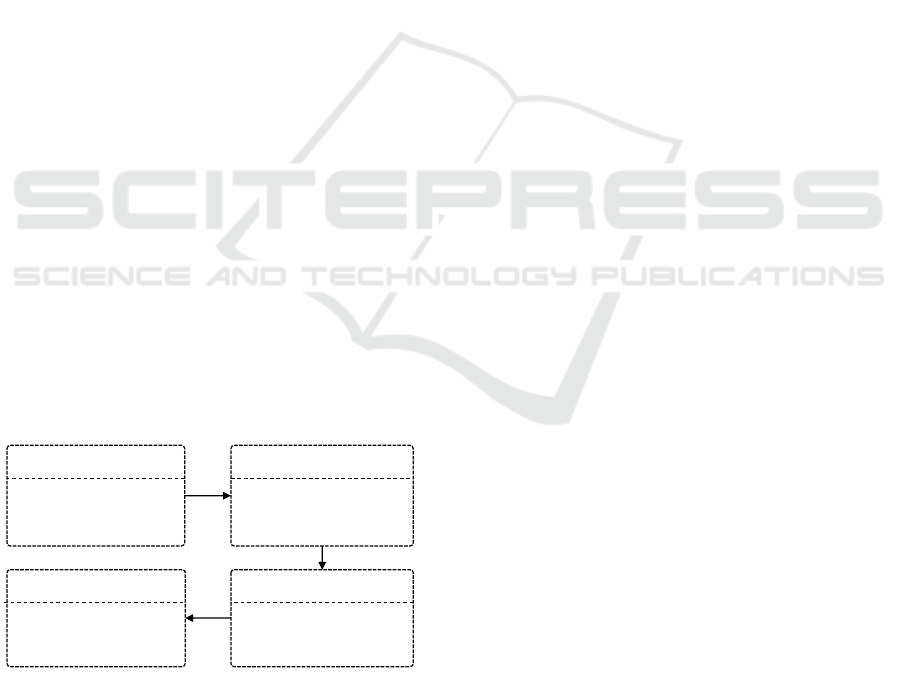
As illustrated in Figure 3, the proposed self-
management strategies are encoded within Maude’s
functional and system modules. This integration re-
sults in the definition of five complementary mod-
ules that collectively encompass the operational se-
mantics, summarized below:
Functional Module
WORKFLOW-DATA
• SoS Workflow Structure
• Functional chain structure
• Unwanted States/Desired
System Module
MISSION-BASED-EXEC
Conditional rewriting rules
specifying Mission execution
Strategies Module
FUNC-CHAIN-STRAT
Strategies for managing
Mission execution
System Module
Verification of quantitative
priorities of Missions
VERIF-ANALYSIS
Figure 3: Overview of the Maude-based specification mod-
ules.
- Functional Module WORKFLOW-DATA: Its
role is to define the structural syntax of the work-
flow of Directed SoSs by implementing the functional
chain elements (i.e., different executing missions) in
the form of sorts and operations. This structure allows
for the construction of a complete structured process
that begins with individual missions and finishes with
one or more global missions, resulting in a structured
missions workflow enabled by the systematic organi-
zation of temporal dependencies.
- The System Module MISSION-BASED-
EXEC: This module includes the WORKFLOW-
DATA module to implement a set of rules and con-
ditions to enable the execution of missions based on
temporal attributes and conditions. It encapsulates the
semantics provided by a suite of rewriting rules, facil-
itating the execution of a suitable functional chain by
selecting the optimal choices based on timing criteria.
- The FUNC-CHAIN-STRAT Module: This
module integrates the TIME-BASED-EXEC module
to formulate strategies that direct and plan SoS execu-
tion. It focuses on enforcing specific rewriting rules to
self-prioritize behaviors, ensuring missions align with
objectives. It effectively avoids unwanted behaviors
and selects optimal mission paths based on criteria
such as arrival time and duration.
- System VERIF-ANALYSIS Module: This
module describes a set of LTL properties introduced
to verify the desired/unwanted behaviors related to
time constraints of the SoS. These properties are ana-
lyzed using the Maude model-checker tool, and more
precisely, search commands are used to verify a prop-
erty on a simulation from an initial state of a SoS to
a final state, applying the set of conditional rewriting
rules.
This approach supports a modular integration, in
which Maude-based modules can be integrated with
others, allowing easy extension or independent edit-
ing of their specifications. More specifically, by lever-
aging conditional rewrite logic, the system maintains
the operational flexibility and resilience essential to
managing the complexities of these systems.
4.1 Mission Specification
The specification of each mission in the SoS’ WF in-
cludes the necessary information to describe the mis-
sion’s structure, checking predicates, temporal con-
straints, and their violation signals, all specified in an
object-oriented class. The latter is characterized by its
timeline and operational parameters. This class is de-
fined by several attributes that describe the mission’s
state and progress, alongside its temporal constraints
and resource requirements. This class is defined by
the following Maude declaration:
class Mission | localClock : Time, duration
: Time, arrivalTime : Time, quitTime : Time,
delay : Time, deadline : Time, missionState:
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
320

MissionState, resType : ResType, RAUT Time,
sg : Sig, rs : Rs .
The localClock attribute serves as a real-time
clock to track the mission’s progress and timeline.
The duration describes the total operational time-
frame, while arrivalTime and quitTime describe the
starting and ending, framing the mission’s execution
state. Any deviations from this timeline are captured
by the delay attribute. The deadline describes a strict
time limit for mission completion. The missionState
reflects the current state of the mission instance.
After its Idle state and if its TCs are respected, the
mission moves to waitConsResp and waits for an an-
swer from the controller after sending an allocation
message. At this moment, a resource may be allo-
cated to this mission instance, and it moves to the
state executing, then to succeed after finishing the ex-
ecution. In case of unavailability of resources (or ab-
sence), the Mission will receive a reject message from
the controller and return to the Idle state. If the Mis-
sion encounters any unexpected problem, it can ask
the controller to extend the availability time of the re-
source by sending the message isAskRenewing to ask
for a renewal of the allocation of resources. And then,
the controller can reply by sending a renewAskOk
message, If the renewal request is accepted, or by
sending isFailed message if the request is denied and
the mission reaches the Idle state, and at the end, the
mission instance will send an exit message to the con-
troller and it will move to Idle state. The following
Maude code specifies possible states that a mission
can be in throughout its lifecycle.
sort MissionState .
ops idle failed waitConsResp executing
succeeded rnwAsk : -> MissionState [ctor] .
ops isConsReqSent isConsReqAccepted
isConsReqRejected : M R -> Bool .
4.2 WF Model: Static Aspects
The concept of WF is defined in an SoS as a compre-
hensive model that structures a set of FCs of missions
to accomplish specific goals. The WF model includes
FCs which are specific sequences or combinations of
missions designed to execute a part of the overall WF.
The WORKFLOW-DATA module in Maude specifies
structured and orchestrated WFs and their associated
FCs. This module focuses on:
• Linking various FCs and integrating them into the
overarching WF structure.
• Classifying these chains into two distinct cate-
gories: primary and alternative. This classifica-
tion enables the definition of the operational be-
havior and managing missions’ priorities within
the WF.
For this classification, the module defines a set
of sorts such as Mission, SecOrPri, FuncChain, and
Workflow which form the structure of these elements.
Each sort serves a distinct purpose: Mission encapsu-
lates individual missions or operations, while SecOr-
Pri represents a secondary or primary categorization
of these missions. The FuncChain sort particularly
acts as a generic structure under which both missions
and their classifications (secondary or primary) are
nested.
op DelayViolated DeadlineViolated
isWCETViolated isArrivalTimeViolated:
Time Time -> Bool .
op isTCViolated : Mission -> Bool .
ops AlternativeM PrimaryM :
-> SecOrPri [ctor] .
op __ : FuncChain FuncChain
-> FuncChain [ctor assoc comm] .
op _|_ : FuncChain FuncChain
-> Workflow [ctor comm prec] .
The classification of Missions into primary (Pri-
maryM) and alternative (AlternativeM) allows for the
prioritization of certain FCs over others in WF, this
feature is essential in scenarios where time-sensitive
missions are involved.
• PrimaryM: represents a subset of missions that
are given priority during the current execution to
achieve the final global Mission.
• AlternativeM: represents a subset of missions that
are not given priority for the current execution,
these missions could still exist in the system and
could be relevant in future executions.
Subsequently, the module employs conditional equa-
tions to analyze the complexities of time. These equa-
tions enable real-time responses to changes in WF.
The module defines different conditions which work
on monitoring the system’s compliance with its oper-
ational parameters. These conditions act as triggers
for rewriting rules the two modules TIME-BASED-
EXEC, allowing the SoS to adapt its behavior in re-
sponse to environmental changes.
4.3 WF Model: Dynamic Aspects
The MISSION-BASED-EXEC module in Maude lever-
ages the conditional equations of WORKFLOW-DATA to
dynamically prioritize and manage missions based on
temporal constraints. It supports:
• Prioritization of missions by urgency and impact.
Maude Strategies-Based SoSs Workflow Modeling
321

• Management of sequential, simultaneous, and
concurrent executions.
• Handling unexpected operational changes while
maintaining time constraints.
• Ensuring missions are completed within desig-
nated time frames.
The module categorizes missions into PrimaryM
and AlternativeM and dynamically adjusts their pri-
orities to construct functional chains (FCs). Below
are the key prioritization rules, with enhanced expla-
nations:
Sequential Mission Ordering. This rule ensures
that missions M1 and M2 are executed in a strict se-
quential order when one depends on the completion
of the other. The rule rearranges missions to maintain
the correct order, ensuring logical dependencies are
respected.
rl [sequentialMissionOrdering] : M1 M2
AlternativeM | PrimaryM => AlternativeM |
PrimaryM M1 M2 .
Prioritize Earliest Start. This rule prioritizes mis-
sions based on their start times, ensuring that mis-
sions scheduled to begin earlier are given precedence.
By comparing the arrival times of M2 and M3, the
mission with the earlier start time is promoted to
PrimaryM.
crl [prioritizeEarliestStart] : M2 M3
AlternativeM | PrimaryM M1 =>
if (getArrivalTime(M2) < getArrivalTime(M3))
then AlternativeM M3 | PrimaryM M2 M1
else AlternativeM M2 | PrimaryM M3 M1 fi .
Prioritize Earliest Completion. This rule focuses
on completing missions as quickly as possible by pri-
oritizing those with earlier finish times. This method
minimizes delays in the overall workflow and ensures
that shorter missions do not unnecessarily hold up
progress. The rule compares the completion times
(getQuitTime) of M2 and M3, prioritizing the mis-
sion that can finish sooner.
crl [prioritizeEarliestCompletion] : M2 M3
AlternativeM | PrimaryM M1 =>
if (getQuitTime(M2) <= getQuitTime(M3))
then AlternativeM M3 | PrimaryM M2 M1
else AlternativeM M2 | PrimaryM M3 M1 fi .
Prioritize Shortest Mission. This rule gives prior-
ity to missions with the shortest duration, ensuring
that smaller missions are completed first. This can
accelerate the overall workflow by quickly resolv-
ing missions that would otherwise accumulate and
create inefficiencies. The rule evaluates the dura-
tions (getDuration) of M2 and M3 and promotes the
shorter mission to PrimaryM.
crl [prioritizeShortestMission] : M2 M3
AlternativeM | PrimaryM M1 =>
if (getDuration(M2) <= getDuration(M3))
then AlternativeM M3 | PrimaryM M2 M1
else AlternativeM M2 | PrimaryM M3 M1 fi .
Minimize Mission Delays. This rule targets the re-
duction of delays in mission execution, which is cru-
cial in maintaining efficiency and meeting deadlines.
By comparing the delay metrics (getDelay) of M2
and M3, the rule prioritizes the mission with the
least delay, ensuring smoother progression through
the functional chain.
crl [minimizeMissionDelays] : M2 M3
AlternativeM | PrimaryM M1 =>
if (getDelay(M2) <= getDelay(M3))
then AlternativeM M3 | PrimaryM M2 M1
else AlternativeM M2 | PrimaryM M3 M1 fi .
On the other hand, the rules defined in the pre-
vious modules aim to ensure desired behavior and
outcomes during mission execution. However, prac-
tical execution may encounter challenges such as the
complexity of inter-CS interactions, unpredictable en-
vironmental conditions, or human error. These is-
sues can significantly impact the effectiveness of rule
implementation, especially in dynamic and critical
emergency scenarios.
The rest of this section addresses rules that de-
scribe unwanted behaviors and their operational sig-
nificance within workflows. These rules enable the
system to overcome runtime challenges, avoid envi-
ronmental issues, and ensure that missions align with
the strategic goals of the SoS. The rules focus on ad-
dressing timing violations:
Deadline Violation. This rule checks if a mission
exceeds its deadline. If the current time (Clock) is
greater than the mission’s deadline (Deadline) and
the mission state is not already failed, the mission’s
state transitions to failed. This is essential to iden-
tify and address missions that cannot meet their time
frame.
crl [deadlineViolation] :
< Mid : Mission | deadline : Deadline,
localClock : Clock, missionState : State>
=> < Mid : Mission | missionState : failed >
if isDeadlineViolated(Clock, Deadline) and
State =/= failed .
Delay Violation. This rule activates when a mis-
sion’s delay (Delay) exceeds its expected dura-
tion (ExpectedDuration). If the delay surpasses
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
322

this threshold and the mission state is not already
failed, the state is updated to failed. This en-
sures timely identification of delayed missions and
promotes timely execution.
crl [delayViolation] :
< Mid : Mission | delay : Delay,
expectedDuration : ExpectedDuration,
missionState : State > =>
< Mid : Mission | missionState : failed >
if isDelayViolated(Delay, ExpectedDuration)
and State =/= failed .
Arrival Time Violation. This rule ensures that mis-
sions do not start too early. If the current time
(Clock) is less than the mission’s expected arrival
time (ExpectedArrivalTime) and the mission state
is not failed, the state transitions to failed. This
prevents premature mission execution and ensures
proper scheduling.
crl [arrivalTimeViolation] : < Mid : Mission |
arrivalTime : ExpectedArrivalTime, localClock
: Clock, missionState : State, ... > => < Mid
: Mission | missionState : failed, ... > if
isArrivalTimeViolated(Clock,
ExpectedArrivalTime) and State =/= failed .
Quit Time Violation. This rule checks if a mission
exceeds its quit time (QuitTime). If the current time
(Clock) surpasses the quit time and the mission state
is not failed, the state transitions to failed. This
ensures missions adhere to their time limits and pre-
vents cascading delays.
crl [quitTimeViolation] :
< Mid : Mission | quitTime : QuitTime,
localClock: Clock, missionState : State,
... > => < Mid : Mission | missionState :
failed, ... > if isQuitTimeViolated(Clock,
QuitTime) and State =/= failed .
These rules collectively address critical timing vi-
olations, ensuring missions do not start too early, de-
lay excessively, miss deadlines, or exceed allocated
time. They play a crucial role in managing workflows
in time-sensitive environments by strategically identi-
fying and mitigating potential issues.
5 STRATEGIES FOR
SELF-MANAGEMENT IN SoSs
As seen in the previous section, the execution of de-
sired behavior rules related to time does not guaran-
tee that their execution is respected, since escaping
from a violated, non-deterministic or unwanted be-
havior states without applying the rules describing the
unwanted behavior is possible. This suggests that the
unwanted behavior rules must be applied before any
rules of desired behaviors, for which strategies will be
helpful in this case. In this section, we propose a set
of self-management strategies proposed govern both
the desired behaviors specified using rewriting rules
and avoid any unpredictable, unwanted ones. These
strategies are key to the SoS’s ability to balance func-
tional execution constraints, they help at:
- Determining the execution of missions provided
by CSs within the SoS. The aim is to ensure timely
mission completion.
- Selecting and executing the optimal path to
achieve the SoS’s final goal, considering factors such
as urgency.
- Prioritizing missions with urgent or time-
sensitive requirements. It schedules missions ac-
cording to their time-criticality, addressing scenarios
where timing is a crucial factor.
The Strategy module forms the foundation for two
derived classes: MainStrat and ComponentStrat. The
ComponentStrat provides additional support to gov-
ern and respond to dynamic prioritization of missions,
while the MainStrat represents the primary strategies
that are essential for selecting a functional chain to ex-
ecute. The main strategies within the MainStrat class
i.e. mission-based functional chain strategies, deter-
mine the execution path of the workflow, guiding it
toward completing its goals. These strategies are ro-
bust and incorporate the component rules to promote
advantageous missions and ensure that the workflow
remains resilient in the face of changing internal and
external conditions.
5.1 Component Strategies
In this section, we define a set of component strate-
gies based on time constraints in the module FUNC-
CHAIN-STRAT. The latter includes MISSION-
BASED-EXEC to provide four component strategies
as follows:
orderBasedExecStr: this strategy switches be-
tween concurrent and sequential mission execution. It
starts with executing concurrent execution, governing
parallel mission, and then goes to sequential ordering
if concurrent execution is not feasible.
sd orderBasedExecStr :=
SequentialMissionOrdering
or-else ConcurrentMissionExecution .
timeCriticalmissionstr: this strategy focuses on
time-sensitive missions. It firstly prioritizes missions
based on their start times and then completion times,
ensuring that the most urgent missions are addressed
promptly.
Maude Strategies-Based SoSs Workflow Modeling
323

sd timeCriticalMissionStr :=
PrioritizeEarliestStart
or-else PrioritizeEarliestCompletion .
quickCompletionStr: this strategy emphasizes quick
mission completion. It aims to prioritize missions
with shorter durations and minimize delays in mission
execution.
sd quickCompletionStr :=
PrioritizeShortestMission
or-else MinimizeMissionDelays .
violatedConstraintsStr: this strategy handles mis-
sions that risk violating time constraints. It dynam-
ically applies rules to manage and rectify such situa-
tions, preventing potential disruptions in mission exe-
cution.
sd violatedConstraintsStr :=
DeadlineViolation |
DelayViolation |
ArrivalTimeViolation |
QuitTimeViolation .
In these strategies, the operators or-else, |, and ;
play pivotal roles in strategizing mission execution
within a SoS:
- The or-else operator is crucial for providing fall-
back options, ensuring that if one strategy is not ap-
plicable, an alternative can be immediately employed.
This is exemplified in the timeCriticalMisStr strategy,
where the system first attempts to apply prioritizeEar-
liestStart and, failing that, defaults to prioritizeEarli-
estCompletion.
- The | operator introduces a layer of non-
determinism, allowing the system to choose any ap-
plicable strategy without a fixed order, as seen in the
violatedConstraintsStr strategy, where the system can
select any one of the violation handling rules like
deadlineViolation or delayViolation, etc.
- The ; operator, on the other hand, ensures a con-
trolled, sequential execution of strategies.
In the next section, we show how these strate-
gies will be coordinated and executed in a specific
sequence using one Main Strategy.
the FUNC-CHAIN-STRAT module aligns with
the dynamic and often unpredictable nature of SoS
environments, ensuring efficient and effective system
operations.
5.2 Main Strategies
The FUNC-CHAIN-STRAT module also defines one
main Main Strategy missionBasedFCStrategy
which incorporate the previous strategies and their
rules. In this strategy, the component strategies like
orderBasedExecStr, timeCriticalMissionStr,
and quickCompletionStr are executed in a specific
sequence using the flexibility of or-else, the non-
determinism of |, and the controlled execution of ;.
This sequential execution guarantees a structured and
orderly approach to execute missions. Collectively,
these strategies enable the system to adaptively man-
age various temporal scenarios in an SoS, prioritizing
mission execution utilization while avoiding conflicts
and undesirable states. The latter is reached by lever-
aging the flexibility of not(violatedConstraintsStr)
which aligns with the dynamic and the unpredictable
nature of time related violated constraints in an SoS
environments.
strat missionBasedFCStrat .
sd missionBasedFCStrat := (match AlternativeM
| G) ? idle : (orderBasedExecStr;
timeCriticalMissionStr; quickCompletionStr;
not(violatedConstraintsStr); selectedFuncCh) .
The strategy missionBasedFCStrategy is recur-
sive strategies that repeat these steps forever or un-
til the final mission is reached. They are restric-
tive and avoid executing conflicts or any unwanted
states by discarding all missions where violatedCon-
straints and/or missionBasedFCStrategy are possible
with not(α) ≡ α? f ail : idle. i.e. Executing violated-
Constraints and/or missionBasedFCStrategy still re-
quires visiting the conflicts and unwanted states de-
fined in the module WORKFLOW-DATA and speci-
fied in the two execution modules as conditional rules,
but this execution path is discarded as if the state were
never visited.
More specifically, these strategies encapsulate
the operational semantics defined in WORKFLOW-
DATA, including various ops and ceq conditions
that determine the states of missions. For in-
stance, conditions like DelayViolated, DeadlineVi-
olated, isWCETViolated, and isArrivalTimeViolated
identify risky states based on time constraints. These,
along with the unscheduledMissionExecution rules in
TIME-BASED-EXEC, help identify and manage un-
desirable states.
By synchronizing these strategies and rules, the
module effectively prevents management conflicts
and contradictory decisions. It ensures that each mis-
sion is executed while maintaining the overall balance
within the SoS.
6 EXECUTION AND ANALYSIS
In this section, we analyze the FESoS case study
through multiple execution scenarios. As depicted in
Figure 2, two functional chains are presented, demon-
strating their potential to achieve global mission ob-
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
324

jectives. For simplicity and ease of reference, the mis-
sions within these functional chains are designated
as M1, M2, M3, ..., Mn. The Maude Strategy Lan-
guage is employed to execute these mission specifica-
tions. Using the Maude’s command srew which fa-
cilitates the exploration of different state transitions
within the strategy, the missionBasedFCStrat strategy
guides the system from its initial state to the criti-
cal global mission. It integrates various component
strategies from the MISSION-BASED-EXE module
(e.g. SequentialMissionOrdering and Concurrent-
MissionExecution), as well as prioritization strate-
gies (e.g. PrioritizeEarliestStart and PrioritizeEar-
liestCompletion) to categorize FESoS missions into
two distinct groups: PrimaryM and AlternativeM:
Maude> srew initState using
missionBasedFCStrat.
Solution 1
rewrites: 124
result missionBasedFCStrat: AlternativeM M4
M5 M11 M13...M29 | PrimaryM M0 M1 M2 M3
M6 M7 M8.....M30 M33 M34
No more solutions.
rewrites: 124
PrimaryM Missions: These missions constitute
the main functional chain essential for achieving the
global mission M34. Prioritized based on urgency,
start and completion times, and their critical role in
the global objective, missions such as M0 through
M30, M33, and M34 are executed with precedence
to ensure the success of the overall mission.
AlternativeM Missions: These missions, includ-
ing M4, M5, M11, and M13 through M29, provide
supportive roles. They supply necessary resources
and assistance to facilitate the seamless execution of
the primary functional chain.
On the other hand, the search command in
Maude is a versatile tool for exploring (following a
breadth-first strategy) the reachable state space in dif-
ferent ways of systems defined by rewrite rules. This
command is particularly powerful for systems where
multiple outcomes or states can result from a given
initial condition, and it’s essential for analyzing sys-
tems with complex behaviors or verifying properties
across potentially vast numbers of states:
search [ n, m ] in <ModId> : <Term-1>
<SearchArrow> <Term-2> such that <Condition>.
In the context of the FESoS case study, the search
command could be used to simulate different scenar-
ios of emergency responses, ensuring that the strate-
gic objectives are met and that the system behaves
as expected in various potential emergencies. Given
the diverse potentials of FESoS to accomplish global
mission objectives, the search command enables the
exploration of all possible functional chain rules and
helps identify terms that align with a specified target:
Maude> search initState =>* AlternativeM |
PrimaryM M0 M1 M2 M3 M4 M5 M6 M7... M33 M34 .
Solution 1 (state 74)
states: 75 rewrites: 123
empty substitution
no more solutions.
states 80
In this case, the search command was employed
to verify whether the initial state of the FESoS sys-
tem could transition into an expected configuration,
specifically a PrimaryM mission chain that represents
the final goal. The search confirmed a valid path to
the desired state, involving 123 rewrite steps across
75 possible states, with no variable substitutions re-
quired. However, the path revealed conflicts with
the module’s rules, as it navigated through states ex-
hibiting unwanted behaviors. This was further val-
idated using the show path command, which traced
the transitions, showing early adherence to rules like
sequentialMissionOrdering but later involving viola-
tions such as arrivalTimeViolation. For instance:
Maude> show path 40 .
states 0, WF: PrimaryM | AlternativeM M0 M1 M2
M3 M4 M5 M6 M7 M8..... M33 M34
===[ rl ...[sequentialMissionOrdering] . ] ===>
state 1, WF: PrimaryM M0 | AlternativeM M1 M2
M3 M4 M5 M6 M7 M8..... M33 M34
===[ rl ...[sequentialMissionOrdering] . ] ===>
state 2, WF: PrimaryM M0 M1 | AlternativeM M2
M3 M4 M5 M6 M7 M8..... M33 M34
===[ rl ...[sequentialMissionOrdering] . ] ===>
state 3, WF: PrimaryM M0 M1 M2 | AlternativeM
M3 M4 M5 M6 M7 M8..... M33 M34
===[ rl ...[sequentialMissionOrdering] . ] ===>
state 4, WF: PrimaryM M0 M1 M2 M3 | AlternativeM
M4 M5 M6 M7 M8..... M33 M34
===[ rl ...[prioritizeEarliestStart] . ] ===>
state 5, WF: PrimaryM M0 M1 M2 M3 M6 |
AlternativeM M4 M5 M6 M7 M8..... M33 M34 ....
===[ rl ...[arrivalTimeViolation] . ] ===>
state 40, WF: PrimaryM M0 M1 M2 M3 M6 M7 M8..M30
| AlternativeM M4 M5 M6 M7 M8..... M33 M34
The provided result shows a workflow sequence of
states and transitions (denoted as WF). This workflow
is structured around managing a set of missions (M0,
M1, M2, etc.) using two categories: PrimaryM and
AlternativeM:
• Initial State (state 0): All missions (M0 through
M34) are under AlternativeM. This represents a
starting point where all missions are initially in an
alternative or secondary queue, awaiting prioriti-
zation or scheduling.
• Transitions Using [sequentialMissionOrdering]:
The sequence of transitions from state 1 to state
Maude Strategies-Based SoSs Workflow Modeling
325

4 appears to follow a rule labeled [sequentialMis-
sionOrdering]. This suggests a process where
missions are moved one by one from Alterna-
tiveM to PrimaryM. For example, in state 1, M0
is moved to PrimaryM, and in state 2, M1 is also
moved, and so on.
• Transition Using [prioritizeEarliestStart]: At state
4, the transition rule changes to [prioritizeEarli-
estStart], indicating a shift in the strategy for or-
dering missions. This means that instead of sim-
ply moving missions sequentially, the next mis-
sion to be moved to PrimaryM is selected based
on the strategy of earliest start time. This is evi-
dent as M6 is moved to PrimaryM in state 5, skip-
ping M4 and M5.
• Final State (state 40): By state 40, a set of
missions (M0, M1, M2, M3, M6, M7, M8, ...,
M30) are in PrimaryM, and the remaining ones
(M4, M5, M31, M32, M33, M34) are in Alter-
nativeM. The transition to this state is marked by
[arrivalTimeViolation], suggesting that this tran-
sition might be due to a violation of expected ar-
rival times of missions, impacting the scheduling
or prioritization.
7 RELATED WORK
While the field of SoS research employs formal lan-
guages and approaches such as ArchSoS, mKAOS,
BRS etc. they still neglect time-aware missioned
SoSs and their self-managed workflows. This section
provides an overview of these works.
In (Seghiri et al., 2022), the authors proposed
ArchSoS, a formal ADL combining BRS and Maude
language to address hierarchical structures and dy-
namic reconfigurations in SoSs. ArchSoS facilitates
understanding and design analysis through graphical
and formal syntax. The approach integrates rewrite
theories to provide operational semantics, enabling
modeling, simulation, and qualitative analysis of SoS
behaviors using Maude’s rewriting engine and LTL
model-checking. While effective in modeling and
verifying cooperation and mission consistency. In
the same context, the paper (Stary and Wachholder,
2016) have explored the interoperability and emer-
gent behavior in SoSs using bigraphs. This approach
addresses the complexity of highly interactive dis-
tributed systems, such as e-learning environments,
where dynamic adaptation to user needs and opera-
tional conditions is critical. Bigraphs provide a dual
representation of systems, capturing both physical
(space) and logical (link) relationships, making them
particularly suited for managing the interactions of
federated, independent CSs within an SoS.
In (Silva et al., 2020), the authors introduced a
methodology to formally verify mission-related prop-
erties in SoS architectural models, emphasizing emer-
gent behaviors and mission accomplishment. Us-
ing mKAOS and DynBLTL, they defined and veri-
fied properties at three levels, derived automatically
from mKAOS models, with statistical model check-
ing via PlasmaLab. On the other hand, the paper (Gas-
sara and Jmaiel, 2017) has presented BiGMTE, a tool
for modeling and simulating SoS architectures using
BRS transformation techniques. The tool integrates
the Big Red graphical editor for creating bigraphs and
the GMTE tool for graph matching and transforma-
tion. The methodology involves five steps: creat-
ing BRS, encoding them into graphs, graph match-
ing, transformation, and visualizing the results. In the
same context, the paper (Gassara et al., 2017) presents
B3MS, a multi-scale modeling methodology for SoS
based on BRS. It ensures ”correct by design” archi-
tectures through a refinement process that starts with
a designer-defined coarse-grained scale and automat-
ically refines it with lower-scale details while respect-
ing system constraints.
The authors (Oquendo, 2016a) have introduced an
approach to enable the description of evolutionary ar-
chitectures that sustain emergent behaviours and sup-
port dynamic reconfigurations for ongoing SoS mis-
sions. The work defines SosADL from a behavioural
viewpoint, facilitating the specification of indepen-
dent CSs, mediators among them, coalitions of me-
diated CSs, and the architectural conditions that ne-
cessitate the emergence of specific SoS behaviours.
Moreover, the same authors have proposed (Oquendo,
2016b) an approach to support automated verification
and establish correctness properties of SoS architec-
tures, thereby ensuring that the structured and ana-
lytical approach to SoS architecture is not only de-
scriptive but also verifiable. In another research work
(Morrison and Kirby, 2004), they have explored the
functionalities of the ArchWare ADL, emphasizing its
role in active architectures. The paper highlights the
challenges of a cohesive system wherein model spec-
ification and enactment coalesce as integral facets of
a singular, dynamic execution state.
While these approaches provide robust frame-
works for representing dynamic behaviors and struc-
tural changes, they fail to address critical quantitative
aspects, such as the management of temporal con-
straints which are essential for time-sensitive environ-
ments. Moreover, They lack strategies for managing
and executing CSs in an SoS, preventing the effective
handling of Workflows of missions. The absence of
ENASE 2025 - 20th International Conference on Evaluation of Novel Approaches to Software Engineering
326

these strategies makes it difficult to verify the correct-
ness of quantitative properties or simulate both de-
sired and unwanted behaviors and this is what limits
their applicability and effectiveness in real scenarios.
8 CONCLUSION
In this paper, we proposed a formal solution for
designing, implementing, and verifying Time-Aware
SoS workflows, focusing on managing mission be-
haviors constrained by temporal conditions. We intro-
duced a set of rewriting rules to specify and prioritize
primary and alternative missions based on quantita-
tive properties and constraints. These rules are gov-
erned by strategies that enforce desired behaviors and
avoid unwanted ones, ensuring the efficient execution
of workflows. The approach was validated through a
case study of the French Emergency SoS, using the
Maude Strategy language for formal verification.
For future work, we aim to extend the formaliza-
tion and verification of self-* properties (e.g., self-
adaptation, self-awareness) to support a broader range
of predictable and unpredictable workflows. Addi-
tionally, we plan to enhance resource prediction and
mission performance evaluation, providing SoSs with
improved tools for planning and optimizing architec-
tures to achieve better performance, cost efficiency,
and resource optimization.
REFERENCES
Dridi, C. E., Hameurlain, N., and Belala, F. (2022). A
maude-based rewriting approach to model and control
system-of-systems’ resources allocation. In Advances
in Model and Data Engineering in the Digitalization
Era - MEDI-DETECT 2022 Workshop Proceedings,
volume 1751 of Communications in Computer and In-
formation Science, pages 207–221. Springer.
Dridi, C. E., Hameurlain, N., and Belala, F. (2023). A
maude-based formal approach to control and analyze
time-resource aware missioned systems-of-systems.
In 31th IEEE International Conference on Enabling
Technologies: Infrastructure for Collaborative Enter-
prises (WETICE-2023). IEEE.
Gassara, A., Rodriguez, I. B. Jmaiel, M., and Drira, K.
(2017). A bigraphical multi-scale modeling method-
ology for system of systems. Computers & Electrical
Engineering, 58:113–125.
Gassara, A. Bouassida, I. and Jmaiel, M. (2017). A tool
for modeling sos architectures using bigraphs. In Pro-
ceedings of the Symposium on Applied Computing,
pages 1787–1792.
Halima, R. B., Klai, K., Sellami, M., and Maamar,
Z. (2021). Formal modeling and verification of
property-based resource consumption cycles. In 2021
IEEE International Conference on Services Comput-
ing (SCC), pages 370–375. IEEE.
Maamar, Z., Faci, N., Sakr, S., Boukhebouze, M., and Bar-
nawi, A. (2016). Network-based social coordination
of business processes. Information Systems, 58:56–
74.
Maier, M. W. (1998). Architecting principles for systems-
of-systems. Systems Engineering: The Journal of
the International Council on Systems Engineering,
1(4):267–284.
Mart
´
ı-Oliet, N. and Meseguer, J. (1996). Rewriting logic as
a logical and semantic framework. Electronic Notes
in Theoretical Computer Science, 4:190–225.
Morrison, R. and Kirby, G. Balasubramaniam, D. e. a.
(2004). Support for evolving software architectures
in the archware adl. Proceedings. Fourth Work-
ing IEEE/IFIP Conference on Software Architecture
(WICSA 2004), pages 69–78.
Oquendo, F. (2016a). Formally describing the archi-
tectural behavior of software-intensive systems-of-
systems with sosadl. In 2016 21st International Con-
ference on Engineering of Complex Computer Systems
(ICECCS), pages 13–22. IEEE.
Oquendo, F. (2016b). Formally describing the software
architecture of systems-of-systems with sosadl. In
2016 11th system of systems engineering conference
(SoSE), pages 1–6. IEEE.
Petitdemange, F., Borne, I., and Buisson, J. (2018). Mod-
eling system of systems configurations. In 2018 13th
Annual Conference on System of Systems Engineering
(SoSE), pages 392–399. IEEE.
Rubio, R., Mart
´
ı-Oliet, N., Pita, I., and Verdejo, A. (2021).
Strategies, model checking and branching-time prop-
erties in maude. Journal of Logical and Algebraic
Methods in Programming, 123:100700.
Seghiri, A., Hameurlain, N., and Belala, F. (2022). A for-
mal language for modelling and verifying systems-of-
systems software architectures. International Journal
of Systems and Service-Oriented Engineering (IJS-
SOE), 12(1):1–17.
Silva, E., Batista, T., and Oquendo, F. (2020). On the
verification of mission-related properties in software-
intensive systems-of-systems architectural design.
Science of Computer Programming, 192:102425.
Stary, C. and Wachholder, D. (2016). System-of-systems
support—a bigraph approach to interoperability and
emergent behavior. Data & Knowledge Engineering,
105:155–172.
¨
Olveczky, P. C. (2004). Real-time maude 2.3
manual. Technical report, Research Report.
http://urn.nb.no/URN:NBN:no-35645.
Maude Strategies-Based SoSs Workflow Modeling
327
