
Application of Consensus Protocols to Vehicular Communications
Scenarios for the Negotiation of Cooperative Traffic Maneuvers
Miguel Tavares
1
, Emanuel Vieira
1 a
, Jo
˜
ao Almeida
2 b
and Paulo Bartolomeu
1 c
1
Instituto de Telecomunicac¸
˜
oes - Departamento de Eletr
´
onica, Telecomunicac¸
˜
oes e Inform
´
atica, Universidade de Aveiro,
Campus Universit
´
ario de Santiago, 3810-193 Aveiro, Portugal
2
Instituto de Telecomunicac¸
˜
oes, Universidade de Aveiro, Campus Universit
´
ario de Santiago, 3810-193 Aveiro, Portugal
Keywords:
Connected and Automated Vehicles (CAVs), Vehicle-to-Everything (V2X) Communications, Consensus
Protocols, Cooperative Traffic Maneuvers, Intelligent Transportation Systems (ITS), Maneuver Coordination,
Byzantine Fault Tolerance (BFT).
Abstract:
The introduction of Connected and Automated Vehicles (CAVs) has changed the face of the automotive sec-
tor, enhancing further developments in cooperative mobility, public safety and improved transportation system
management. This paper presents an example study of the application of consensus algorithms in Vehicle-
to-Everything (V2X) environments to enable reliable communication among vehicles for the realization of
cooperative traffic maneuvers. Among others, an important mechanism employed in this work is the Verifi-
able Event Extension (VEE), which adds the reliability feature to the V2X communications and ensures trust.
In addition to assessing various network conditions in detail, this work analyzes the performance and resiliency
trade-offs of different consensus protocols applied to maneuver coordination scenarios, namely Zyzzyva, Prat-
ical Byzantine Fault Tolerance (PBFT), HotStuff, and Three-Phase Commit (3PC). The obtained results un-
derline the feasibility of applying robust, highly scalable fault-tolerant solutions to open the way towards a
safe deployment of next-generation cooperative and autonomous driving systems.
1 INTRODUCTION
The rapid development of the automotive industry in
the 21st century is transforming the transportation
landscape by embracing Connected and Automated
Vehicles (CAVs) at its core. Beyond improving driver
convenience, CAVs are redefining public safety stan-
dards, optimizing traffic management, fostering co-
operative mobility, and unlocking new opportunities
for economic growth and transportation system effi-
ciency. One of the pillars of this technological rev-
olution is Vehicle-to-Everything (V2X) communica-
tions technology, which provides seamless interaction
among vehicles and with the environment to enhance
intelligent decision-making and coordinated maneu-
vers.
CAVs are equipped with a wide range of sophis-
ticated sensors, such as On-Board Units (OBUs),
Global Navigation Satellite Systems (GNSS), Light
Detection and Ranging (LiDAR), Radio Detection
a
https://orcid.org/0000-0001-9466-4649
b
https://orcid.org/0000-0001-6634-6213
c
https://orcid.org/0000-0002-7471-5135
and Ranging (RADAR), cameras and ultrasonic sen-
sors (Kiraz et al., 2024)(Paluszczyszyn et al., 2024),
to provide real-time awareness of their surround-
ings. However, efficiently utilizing these data requires
the creation of strong frameworks for decentralized
decision-making in dynamic and uncertain scenarios.
Cooperative traffic maneuvers, such as overtaking and
merging, are particularly challenging; vehicles need
not only to process sensor data accurately but also to
agree with their counterparts to ensure the safety and
reliability of their maneuvers.
As an example, Figure 1 illustrates a scenario in
which the green vehicle attempts to overtake the yel-
low car. The arrow lines represent the future trajec-
tories of the vehicles. Two critical questions emerge,
encapsulating the core challenges of this exploration:
• How Can the Green Vehicle Ensure the Ma-
neuver Is Safe?
• How Can the Green Vehicle Trust the Decisions
of Others?
These scenarios highlight the high stakes of coop-
erative maneuvers, where communication failures or
Tavares, M., Vieira, E., Almeida, J. and Bartolomeu, P.
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers.
DOI: 10.5220/0013484900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 235-246
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
235

Figure 1: Scenario for vehicular consensus.
errors can cause serious hazards. Establishing trust
and coordination among vehicles is essential to avoid
these hazards and move towards reliable autonomous
transportation systems.
To this end, this paper presents a detailed compar-
ison of four consensus protocols employed in the ne-
gotiation of cooperative traffic maneuvers: Zyzzyva,
Practical Byzantine Fault Tolerance (PBFT), Hot-
Stuff, and Three-Phase Commit (3PC). This maneu-
ver coordination process takes place over short-range
vehicular networks, relying either on IEEE 802.11p
or C-V2X based communications technologies. Per-
formance analysis of the different consensus proto-
cols is conducted in a variety of network configura-
tions, including node density and packet loss scenar-
ios, thus providing deep insights into their efficiency,
fault-tolerance, and practical applicability. The find-
ings highlight the feasibility of employing scalable
and fault-tolerant solutions that can empower future
cooperative autonomous driving systems.
The remainder of this document is organized as
follows. Section 2 presents an overview of related
works, followed by Section 3, that provides the sys-
tem model and the assumptions of the proposed de-
sign. Then, Section 4 presents the consensus algo-
rithms used in this work and a detailed explanation of
one of them (Zyzzyva). After that, Section 5 describes
the implementation of the framework developed for
the analysis of the consensus processes. Section 6
presents the evaluation of the different consensus pro-
tocols, including the setup used, the tests performed,
and the results obtained. Finally, Section 7 provides
the final conclusions drawn from the research findings
and outlines the future work.
2 RELATED WORK
In this section, related work that contributed to the
development of the concepts and methodologies em-
ployed in this study is explored. By reviewing exist-
ing literature, key advancements in the field are high-
lighted, positioning this work within the broader con-
text of ongoing research.
Feng et al. identify key challenges in achieving
consensus in autonomous vehicle networks, particu-
larly under critical conditions (Feng et al., 2023). A
notable issue with consensus algorithms like PBFT is
their reliance on simple majority voting, which may
fall short in scenarios requiring unanimous agree-
ment. To address this, the authors introduce a veto-
collection phase with a feasibility-proofing procedure
preceding the standard consensus process. As a result,
the authors propose two types of consensus:
• Type 1: Follows the traditional PBFT protocol,
relying on majority voting to reach an agreement.
• Type 2: Incorporates the veto-collection phase to
address scenarios where unanimity is required.
Additionally, Feng et al. tackle the challenge
of maneuver coordination, often requiring multiple
small actions. They propose a plan tree to consolidate
a sequence of actions into a single proposal, reducing
the frequency of consensus processes. A gossip al-
gorithm further enhances the PBFT consensus, ensur-
ing robust information dissemination across the net-
work. Simulations demonstrate the efficacy of their
approach, particularly in mitigating communication
failures and handling faulty vehicles.
With the purpose of safeguarding cooperative ma-
neuver information, Vieira et al. propose a system
comprising two key protocols designed to enhance
vehicle coordination and data reliability in connected
environments: the Maneuver Coordination Protocol
and the Maneuver Data Consensus Protocol (Vieira
et al., 2023). The former focuses on negotiation
and agreement among vehicles, leveraging European
Telecommunications Standards Institute (ETSI) ITS
standards to resolve conflicts using basic Maneuver
Coordination Messages (bMCMs). While this pro-
tocol focuses on timeliness and cryptographic secu-
rity, its lack of fault-tolerance poses challenges un-
der adverse conditions. The Maneuver Data Consen-
sus Protocol, in contrast, emphasizes fault-tolerance
and traceability, employing PBFT for data agreement
and blockchain for storage. Hardware-in-the-loop
(HiL) simulations highlight its strengths and limita-
tions, with packet loss significantly impacting perfor-
mance. Despite this, the protocol’s adaptability and
scalability make it a promising solution for connected
environments.
Expanding on the use of alternative consensus al-
gorithms, the AIR-RAFT system integrates the Raft
algorithm with LoRa-based wireless communication
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
236

to address unreliable V2V scenarios (Li et al., 2022).
The proposed solution focuses on decentralized data
consistency over long distances, leveraging LoRa’s
capabilities. While effective in scenarios like pla-
tooning, the system faces limitations in transmis-
sion speed and latency, suggesting a need for further
research into advanced communication technologies
like Cellular-V2X (C-V2X).
In a more generic proposal (Vieira et al., 2024a),
that is able to support different consensus protocols,
Vieira et al. introduce the Verifiable Event Exten-
sion (VEE), a lightweight and modular applicational
extension designed specifically for Intelligent Trans-
portation System (ITS) messages. It enhances vehic-
ular networks by seamlessly adding functionality for
data security, consensus, and trading while maintain-
ing compatibility with existing V2X communication
standard protocols. This design ensures that the im-
plementation does not disrupt or require significant
modifications to the current Cooperative ITS (C-ITS)
framework.
VEE is structured into three core modules that
provide specific functionalities. The Ledger Mod-
ule utilizes localchains, a geographically based dis-
tributed ledger technology, to ensure data immutabil-
ity and traceability, making vehicular data tamper-
proof and highly reliable. The Consensus Module
handles consensus processes, providing an agreement
mechanism for various applications. The PBFT algo-
rithm is given as an example, to enable fault-tolerant
consensus among network participants, particularly
for non safety-critical scenarios. Lastly, the Token
Module facilitates cryptocurrency-based transactions,
enabling the secure and efficient exchange of digital
assets or services, such as toll payments or coopera-
tive maneuver rewards, within the vehicular network.
The VEE framework is designed with perfor-
mance efficiency in mind, minimizing overhead on
the communication channel by leveraging existing
ITS messages as a transport medium. This ap-
proach avoids the need for additional message head-
ers, reducing the network load. The feasibility and
lightweight nature of the system have been validated
through HiL setups, demonstrating its capability to
function effectively under real-world vehicular con-
straints. VEE significantly enhances the security and
accountability of cooperative maneuvers by recording
and verifying vehicular event data. It also supports
distributed trading mechanisms, such as instant road
toll payments and reward systems for cooperative ma-
neuvers, providing a robust platform for value-added
vehicular services. The modular design allows for
customization, enabling its deployment in various ve-
hicular scenarios while addressing diverse use cases.
Finally, V2X messages may lack reliability, for
instance due to sensor errors or malicious nodes,
even when essential security mechanisms (e.g., stan-
dard authentication and authorization protocols) are
in place (Vieira et al., 2024b). To address this issue,
the authors propose the inclusion of consensus infor-
mation on top of the standard V2X messages, in or-
der to be validated using the PBFT algorithm. This
way, it is possible to achieve agreement among vehi-
cles, even in the presence of faults or malicious ac-
tors. The methodology was tested using a HiL setup
that simulates real-world conditions, by introducing a
configurable packet loss rate in the communications
between four OBUs running the ETSI ITS-G5 proto-
col stack. The obtained results showed that dedicated
messages were faster for consensus, while extended
messages were better suited to dense traffic scenarios
due to their lower wireless medium impact. Channel
Busy Ratio (CBR) measurements confirmed the feasi-
bility of both methods. The extended V2X messages
approach is suitable for non-safety-critical scenarios
but may require optimization for time-sensitive tasks.
The reviewed works collectively highlight signif-
icant progress in developing consensus mechanisms
tailored for vehicular networks. From enhancing
PBFT with veto-gathering phases and gossip algo-
rithms to exploring alternative approaches such as
Raft and integrating blockchain technologies, these
efforts address critical challenges such as fault toler-
ance, scalability, and reliability under diverse condi-
tions. However, certain gaps remain unaddressed.
Existing methods typically rely on majority-based
consensus, which, while efficient, can fall short
in scenarios that require unanimous agreement for
safety-critical applications. Although the one-vote
veto mechanism addresses this to some extent, its re-
liance on unanimity can introduce additional delays
and inefficiencies, particularly under moderate/high
packet loss conditions or when the network encom-
passes untrusted nodes. Furthermore, alternative al-
gorithms such as 3PC and other BFT protocols have
not been extensively explored in the context of vehic-
ular networks, leaving questions about their compar-
ative performance under varying packet loss rates and
operational constraints.
To address these limitations, this work focuses on
the systematic evaluation and comparison of differ-
ent consensus algorithms, including PBFT, 3PC, and
other BFT protocols, under diverse network condi-
tions and packet loss rates.
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers
237

3 SYSTEM MODEL
This section presents the system model for the pro-
posed cooperative maneuvers framework and outlines
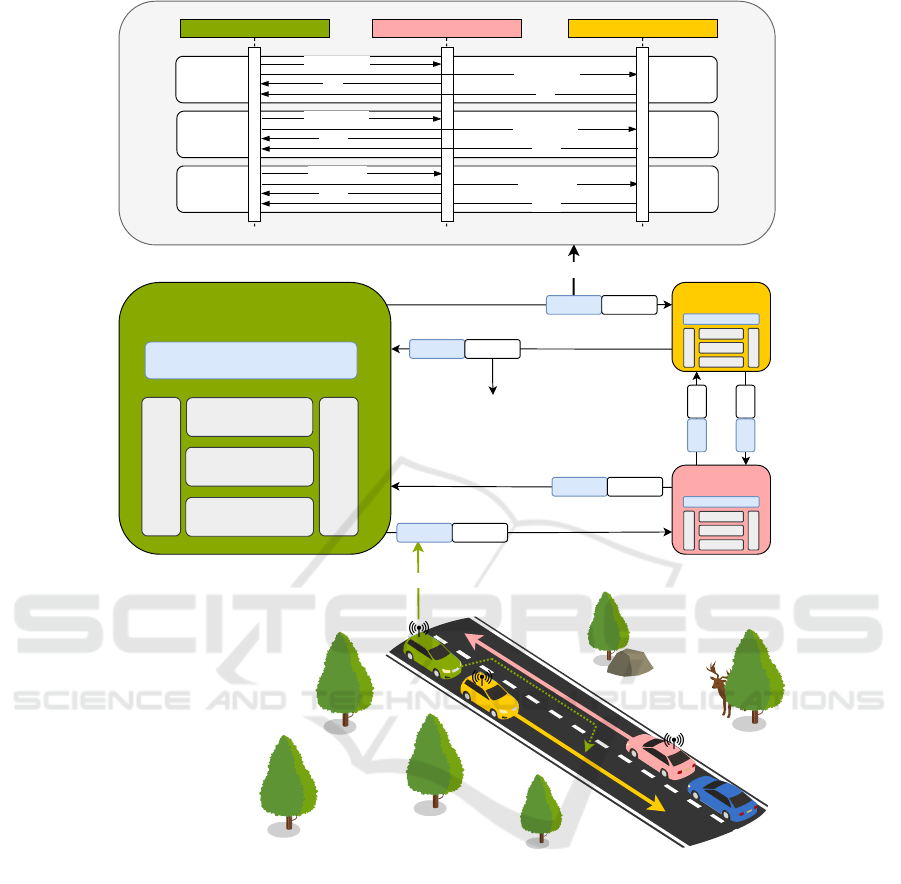
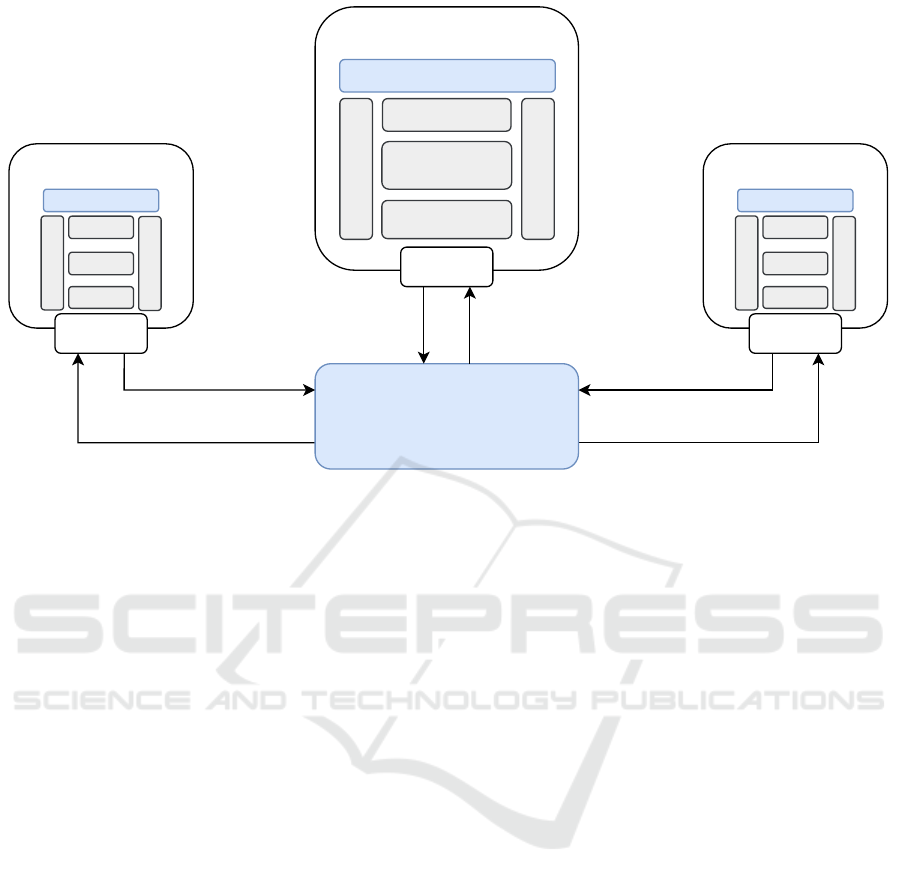
the assumptions considered in the study. Figure 2 pro-
vides an overview of the system model. The system
consists of multiple OBUs, each representing a vehi-
cle, employing the Verifiable Event Extension (VEE)
proposed in (Vieira et al., 2024a). This way, the ITS-
G5 protocol stack running in each of the OBUs is en-
hanced with the Verifiable Event Protocol (VEP) that
is able to support the execution of different consen-
sus algorithms. This extension allows OBUs to pro-
cess and interpret additional data embedded within
ITS messages, facilitating the implementation of con-
sensus processes. It is worth noting that vehicles in
which the stack does not use the extension simply dis-
regard the extended data encapsulated in the ITS mes-
sages. Therefore, these vehicles can still exchange
standard V2X messages and decode VEP-enhanced
packets, but are not able to participate in the consen-
sus mechanisms.
3.1 Assumptions
The proximity of vehicles in the tested scenarios indi-
cates that packet loss is unlikely to exceed 20%, align-
ing with realistic conditions for vehicular networks
experiencing minimal external interference. Typi-
cally, in V2X communications technologies, packet
loss remains below 20% for distances of several hun-
dred meters between transmitting and receiving vehi-
cles. Therefore, this value represents a practical com-
munications range for vehicles engaged in a traffic
maneuver (Molina-Masegosa et al., 2020).
To evaluate the robustness and fault-tolerance
properties of the consensus algorithms, scalability
testing was conducted using configurations of 4, 7,
and 10 nodes, in addition to the client vehicle propos-
ing the maneuver. These configurations were chosen
to represent cooperative traffic maneuvers involving
varying numbers of vehicles, providing information
on the performance of the algorithms under different
levels of complexity and communication challenges.
In the system, replicas (i.e., vehicles participat-
ing in the consensus protocol) may begin the pro-
cess at different states due to asynchronous starts
or operational conditions. These replicas are de-
signed to progress through states independently as
they meet the necessary criteria, offering flexibility
and resilience in achieving system-wide consensus
despite operational variability.
The network model assumes that failures are re-
stricted to message losses, without accounting for
the presence of malicious nodes or intentional dis-
ruptions. This simplifies the fault model, allowing
the focus to remain on the system’s ability to effec-
tively handle communication losses, which is critical
for reaching consensus in vehicular networks.
Finally, while the vehicles are moving, the group
membership for a specific consensus process (coop-
erative maneuver) remains fixed. Only the nodes
present at the beginning participate in the process,
guaranteeing stability.
4 CONSENSUS ALGORITHMS
In this section, an overview of the four consensus
algorithms employed in this work is presented, as
well as a more detailed analysis of a specific one
(Zyzzyva), which is given as an example. PBFT
was selected due to its widespread adoption in related
work, while Zyzzyva was chosen for its speculation
mechanism, which holds promise for enhancing per-
formance. 3PC was considered since it can be eas-
ily applied to scenarios in which all vehicles need to
agree on the proposed maneuver. And finally, Hot-
Stuff was employed as a BFT alternative with small
communications complexity. Since Zyzzyva is the al-
gorithm chosen to give examples in the next sections,
it is the only algorithm explained here in more detail.
The four algorithms are summarized in Table 1, with
the following aspects being used to compare them:
• Consensus Type: Distinguishes consensus algo-
rithms based on their fault-tolerance characteris-
tics. It divides them into BFT and non-BFT algo-
rithms.
• N: Indicates the minimum number of nodes
needed to achieve consensus. f refers to the num-
ber of faulty nodes in the system.
• Communications Model: Refers to the method
or pattern of communications between nodes
in the network. It could include decentralized
communications, master-slave, or other models
that define how nodes exchange information to
achieve consensus.
• Message Complexity: Measures the complexity
of the algorithm in terms of number of messages
exchanged between nodes during the execution of
the consensus process.
4.1 Zyzzyva Protocol
Zyzzyva (Kotla et al., 2010) is a BFT protocol de-
signed to improve the replication of state machines
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
238
doCommit
doCommit
ACK
ACK
Coordinator
canCommit
Participant 1 Participant 2
canCommit
Yes
Yes
preCommit
preCommit
ACK
ACK
Voting
Phase
Pre-
Commit
Phase
Decision
Phase
VEP
ITS Management
ITS Facilities
ITS Networking
& Transport
ITS Access
ITS Security
On-Board
Unit
CAM
VEE
CAM
VEE
Proposed Data
On-Board
Unit
VEE CAM
VEE CAM
VEE CAM
VEE CAM
Piggybacked data
ITS
message
On-Board Unit
Figure 2: System model overview.
by using speculative execution. This approach re-
duces overhead and enhances performance by allow-
ing replicas (corresponding to CAVs participating in
cooperative maneuvers in the context of this work)
to optimistically follow the primary’s proposed order
and respond to client requests immediately. Tempo-
rary inconsistencies are resolved by the clients, who
ensure a single, total ordering of requests.
A key feature of Zyzzyva is speculative execution,
where replicas process requests without engaging in
time-consuming agreement protocols. They send im-
mediate responses to clients, significantly reducing
cryptographic overhead and increasing throughput
compared to protocols like PBFT and Query/Update
(Q/U) (Abd-El-Malek et al., 2005). This speculative
mechanism enables concurrent processing and opti-
mizes system performance.
Zyzzyva employs a client-centric approach to en-
sure consistency. Clients verify stability using replies
that include history information. If the replies are
consistent, the client considers the request complete.
If inconsistencies are detected, clients prompt the sys-
tem to converge to a stable state, driving overall con-
sistency and reliability.
The agreement phase is responsible for ordering
client requests for execution by replicas. The process
begins when a client sends a request to the primary
replica. The primary replica then forwards the request
to the other replicas in the system. Once the replicas
receive the request, they analyze it and send their re-
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers
239
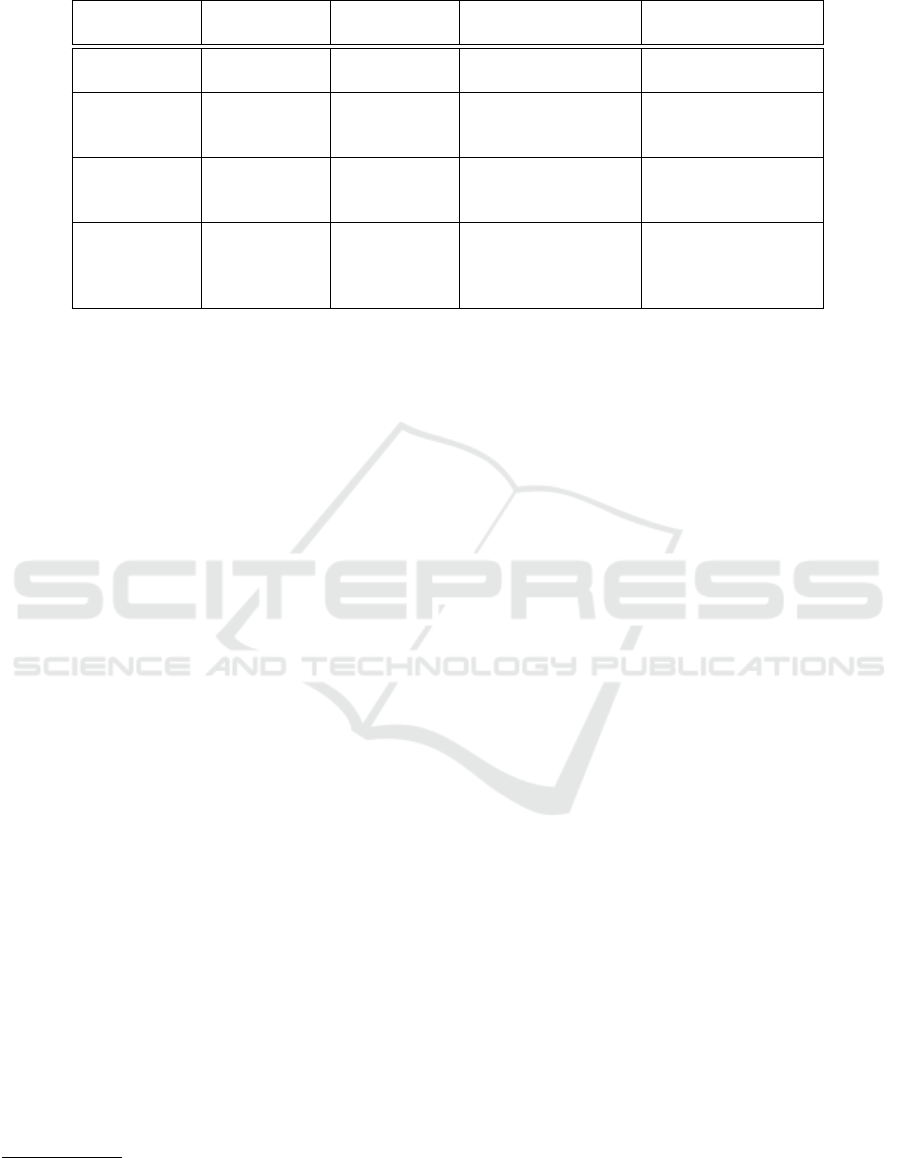
Table 1: Comparison of the four selected consensus algorithms.
Algorithm
Consensus
Type
N
Communications
Model
Message
Complexity
1
HotStuff (Yin
et al., 2019)
BFT 3 f + 1
Client-Primary-
Replicas
O(N)
PBFT (Castro
and Liskov,
1999)
BFT 3 f + 1
Client-Primary-
Replicas
O(N
2
)
Zyzzyva
(Kotla et al.,
2010)
BFT 3 f + 1
Client-Primary-
Replicas
O(N)
3PC
(Al-Houmaily
and Samaras,
2009)
Non-BFT Unanimous
Coordinator-
Participants
O(N)
sponses directly to the client.
Upon receiving the responses, the client evaluates
them to determine whether the request can be con-
sidered complete. This decision is based on the con-
sistency of the responses and the history information
contained within them. There are two possible sce-
narios for determining completion:
1. In a gracious execution scenario, if the client re-
ceives 3 f +1 consistent responses, it considers the
request complete and acts on it accordingly. This
case represents the ideal outcome where sufficient
consistent responses are obtained without issues.
2. In cases involving faulty replicas, if the client re-
ceives between 2 f + 1 and 3 f , it aggregates these
into a commit certificate. The client then sends
the commit certificate to the replicas. Once 2 f +1
replicas acknowledge the commit certificate, the
client considers the request complete and acts on
the reply. This approach ensures robustness in the
presence of potential faults while maintaining the
integrity of the process.
Figure 3 shows the protocol workflow for these
two cases. In green, the situation in which there is an
immediate conclusion of the consensus process and,
in orange, the case where a faulty replica does not
respond, thus leading the client to initiate the commit
phase.
In addition to the agreement procedure, there are
other protocol phases (view change and checkpoint)
that are not employed in this work, given that each
maneuver is executed independently and therefore the
state of the system does not need to be stored from
one maneuver request to the other. The view change
phase ensures the liveliness of the system by elect-
ing a new primary if the current one is faulty or slow.
1
Zyzzyva obtains an O(N) message complexity only in
case of gracious execution; otherwise, the message com-
plexity is O(N
2
) (Zhang et al., 2024).
This phase is initiated when enough replicas suspect
the behavior of the primary and therefore transition
to a new view. The checkpoint phase limits the state
that replicas must store and reduces the cost of view
changes. Periodically, replicas create checkpoints to
manage storage requirements and provide a consistent
state for new view transitions.
Zyzzyva offers several advantages, including re-
duced latency, increased throughput, and strong fault-
tolerance capabilities. By minimizing cryptographic
overheads and enabling concurrent request process-
ing, it achieves higher performance while maintain-
ing safety and liveliness in asynchronous distributed
systems. However, the speculative execution mecha-
nism may result in wasted computational resources if
inconsistencies or incorrect ordering lead to discarded
speculative work.
5 IMPLEMENTATION
This section delves into the implementation details
of such algorithms, illustrating how replicas manage
consensus tasks while handling timeouts, retransmis-
sions, and state synchronization. The message struc-
ture used for the implementation of consensus pro-
cesses is also explained.
Every replica can run multiple consensus pro-
cesses simultaneously, always saving the IDs of pro-
cesses that have already been removed, each with its
own lifecycle. The tasks involved include checking
timeouts, handling messages according to the algo-
rithm, and removing timed-out processes. If the cho-
sen algorithm is BFT (HotStuff, PBFT or Zyzzyva),
each process includes three types of nodes: client
nodes, primary nodes (if applicable), and backup
nodes. In contrast, if the algorithm is 3PC, the nodes
are categorized into two types: coordinator and par-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
240
specResponse (code)
specResponse (code)
commit (data,nodes)
localCommit (code)
localCommit (code)
COMMIT
Client
Replica 0
(Primary)
Replica 1
(Backup)
request (data,nodes)
Replica 2
(Backup)
Replica 3
(Backup)
orderRequest (data,nodes)
orderRequest (data,nodes)
orderRequest (data,nodes)
specResponse (code)
specResponse (code)
specResponse (code)
specResponse (code)
SPECULATIVE
EXECUTION
commit (data,nodes)
commit (data,nodes)
commit (data,nodes)
specResponse (code)
localCommit (code)
Gracious Execution Faulty Replica Scenario
epilogue
epilogue
epilogue
epilogue
EPILOGUE
Figure 3: Agreement phase of Zyzzyva consensus protocol.
ticipants.
A process typically begins when a client sends a
request to the system. In terms of vehicular networks,
this means that a process will start when a vehicle
sends a maneuver request to the group of vehicles in
close proximity, after detecting a trajectory conflict.
The replicas previously selected by the client (the rel-
evant ones for the maneuver) receive the request and,
depending on the algorithm, exchange messages to
reach consensus. The other replicas assume roles as
either primary or backup nodes, being those roles de-
termined by their IDs. The replica with the lowest
ID (excluding the client) is designated as the primary,
provided that the algorithm requires a primary replica.
To illustrate such scenarios, consider a consensus
process that uses the Zyzzyva algorithm. In this pro-
cess, the primary replica has reached the localCom-
mit state (see Figure 3), but the process remains un-
finished due to missing messages on the client side.
In response, the client retransmits its request. Upon
receiving this repeated request, the primary replica
will retransmit its localCommit message, ensuring the
client is updated with the current state. On the other
hand, consider a scenario where a replica, due to
message loss, finds itself in a delayed state. For in-
stance, if a backup replica receives a commit mes-
sage while still in an earlier state — specifically, the
requestHold state, where it awaits the orderRequest
message — it will respond with both the specRe-
sponse and the localCommit messages. By handling
such scenarios, the system ensures that all replicas
eventually synchronize and maintain consistency.
Now, consider a client initiating a consensus pro-
cess using Zyzzyva. Upon receiving the request,
replicas determine which node will act as the primary.
Once identified, the primary creates the process. In
Zyzzyva, only the primary initiates the process upon
receiving the client request. The primary then sends
an orderRequest and a specResponse. Backup repli-
cas receive the orderRequest, create the process lo-
cally, and send their own specResponses. These re-
sponses are collected by the client, which analyzes
the number of unique responses received. If the
client receives 3 f + 1 (where f is the maximum num-
ber of Byzantine nodes tolerated) specResponse mes-
sages, the process is successfully completed. How-
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers
241

ever, if it receives between 2 f + 1 and 3 f responses,
it then sends a commit. Replicas that receive a com-
mit message reply with a localCommit. Once the
client receives 2 f +1 localCommit messages, the pro-
cess is considered complete, and its state transitions to
finalized.
Periodic mechanisms are also in place to iterate
through all ongoing processes and perform two key
verifications:
• Timeouts for Stage-Specific Retransmissions:
this involves checking if the retransmission timer
for the current stage has exceeded the retry time-
out. If it has, the replica retransmits messages, up
to a maximum of five retransmissions for that pro-
cess. When the limit of 5 is reached, the process
is marked as timed out.
• Process Timeout Status: if a process is consid-
ered to have timed out, it is removed. Depend-
ing on the circumstances, the process is marked
as completed (if the success criteria were met) or
as failed.
A process is considered timed out if any of the
following conditions are met:
• Retry Timeout: the time since the last activity
exceeds a certain threshold value (11 seconds by
default).
• Retry Count: the number of retries has exceeded
the maximum allowed (5).
• Lifetime Limit: the total duration of the process
from its initiation to the current time exceeds the
maximum allowed (30 seconds by default).
5.1 VEE Message Structure
In this work, ASN.1 description language is used to
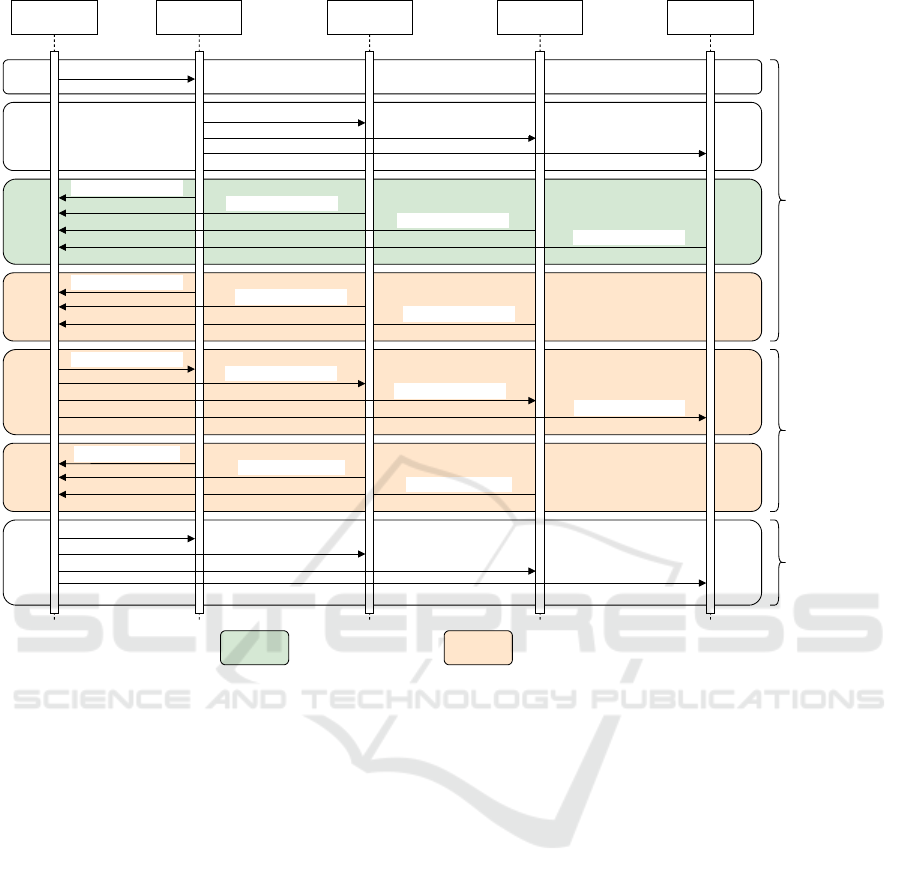
define the message structure. Figure 4 illustrates the
structure of VEE, highlighting its main modules: con-
sensus, ledger and token. In the original VEE pro-
posal (Vieira et al., 2024a), all these modules could
be optionally used, but for the purpose of this work
the consensus module is always employed, serving
as a mandatory component for the execution of the
consensus process. This module contains the chosen
consensus algorithm, such as Zyzzyva, PBFT, Hot-
Stuff, or 3PC, along with a nonce representing the
process ID and a timestamp indicating when the mes-
sage extension was formed. The figure specifically
uses Zyzzyva as an example to demonstrate the con-
sensus representation.
Each algorithm is represented by different ele-
ments corresponding to the various stages of its work-
flow. As shown in Figure 4, Zyzzyva can use one of
the following six elements in each VEE transmission:
1. request – sent from the client to the primary
node, containing the proposed operation (maneu-
ver) and the identification of the participating
nodes.
2. orderRequest – used by the primary replica to
forward the client request to all remaining repli-
cas.
3. specResponse – sent by the primary or secondary
replicas to the client, containing only a code.
In this work, it is ensured that a positive reply
(“OK”) is always conveyed in the code field.
4. commit – transmitted by the client, when it re-
ceives between 2 f +1 and 3 f specResponses. The
proposed operation (maneuver) and the participat-
ing nodes are retransmitted to ensure synchroniza-
tion.
5. localCommit – operates similarly to specRe-
sponse, allowing primary and secondary replicas
to send a reply to the client.
6. epilogue – sent by the client to signal when the
consensus process has been successfully com-
pleted.
6 EVALUATION
In this section, an overview of the experimental setup
used for the evaluation process is provided, as well as
an analysis and discussion of the obtained results.
6.1 Experimental Setup
In order to evaluate the performance of the different
consensus algorithms, an experimental setup was de-
veloped using Docker containers. All containers are
hosted on the same laptop with the following spec-
ifications: 11th Gen Intel® Core™ i7-1165G7 @
2.80GHz (8 cores), 16GB of RAM, and a 512GB
NVMe SSD, running Ubuntu 22.04 LTS.
Each container in the environment is equipped
with the ETSI ITS-G5 protocol stack and VEP, en-
abling the use of ITS message extensions. The setup
configuration, illustrated in Figure 5, comprises a
minimum of five to a maximum of eleven of these
containers:
• Container 1: acts as the client, initiating and
managing the consensus processes.
• Container 2: serves as the primary replica, re-
sponsible for coordinating the consensus process
when required.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
242
consensus :
SEQUENCE
zyzzyva :
CHOICE
request :
SEQUENCE
localCommit :
SEQUENCE
commit:
SEQUENCE
orderRequest :
SEQUENCE
specResponse :
SEQUENCE
nonce :
INTEGER
timestamp :
INTEGER
proposedData :
OCTET
STRING
nodes :
SEQUENCE OF
INTEGER
algorithm :
CHOICE
hotstuff :
CHOICE
pbft :
CHOICE
code :
ENUMERATED
VEE :
SEQUENCE
ledger :
SEQUENCE
token :
SEQUENCE
Mandatory Optional Choice (Max.1)
epilogue :
SEQUENCE
eventID :
INTEGER
spID :
INTEGER
3pc :
CHOICE
Figure 4: ASN.1 definition of the implemented VEE message format (Zyzzyva used as an example for the detailed structure).
• Containers 3-11: operate as backup replicas par-
ticipating in the consensus process.
The containers are all connected to the same lo-
cal network (dsrc network) via individual network in-
terfaces. This virtual V2X network, running on the
test laptop, is responsible for managing all traffic gen-
erated by the various ETSI ITS-G5 protocol stacks.
To simulate real-world conditions, traffic control
rules are applied to each container’s interface, specif-
ically affecting incoming traffic. These rules are used
to introduce packet loss, mimicking network disrup-
tions and challenging wireless communications chan-
nel conditions. This way, the setup attempts to simu-
late real-world scenarios, providing a controlled envi-
ronment for systematic testing.
To effectively evaluate the consensus algorithms,
the following tests were conducted:
• Performance Testing: measured the delays in
reaching consensus under various network con-
ditions. Simulated different levels of packet loss
rates (e.g., 0%, 1%, 5%, and 20%) to assess the
fault-tolerance and efficiency of the algorithms.
• Scalability Testing: Increased the number of
nodes in the network to observe the algorithm’s
performance in maneuver scenarios with varying
traffic complexity. Examined how the system han-
dles additional replicas and higher communica-
tion loads.
In these experimental tests, it was ensured that
only one consensus process was active at any given
time. This was accomplished by consistently using
the same client node to initiate each process and by
introducing a sufficiently large interval between the
start of consecutive processes. This framework pro-
vides a flexible and controlled platform for testing,
allowing the simulation of complex, real-world sce-
narios with distinct packet loss rates, node failures,
and varying network loads. It enables the assess-
ment of fault-tolerance and efficiency metrics regard-
ing the consensus algorithms performance under dif-
ferent network stress conditions, as well as the vali-
dation of node synchronization and state correctness
during the consensus process.
6.2 Results
The total durations of the consensus processes mea-
sured during the experiments are presented in Fig-
ure 6 as empirical cumulative distribution functions
(ECDFs). Each ECDF is derived from 100 consen-
sus process delay measurements for each of the al-
gorithms employed in this work. The results docu-
ment the time required for the network to reach agree-
ment based on a request with dummy payload, as well
as the percentage of successful consensus processes
under various conditions of node count and average
packet loss rate. Extended messages were the sole
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers
243
dsrc_network
192.168.1.0/24
eth0
VEP
Management
Facilities
Networking
& Transport
Access
Security
Container 1
Client/Coordinator
Container 3-11
Secondary Replicas
Container 2
Primary Replica
eth0 eth0
traffic control (tc):
simulates packet loss
on incoming traffic.
Figure 5: Experimental setup used to evaluate consensus algorithms performance.
type of messages tested. Although this approach re-
quires more time to achieve consensus compared to
dedicated messages, it results in a lower channel busy
ratio (CBR) (Vieira et al., 2024b), thereby minimiz-
ing interference with other C-ITS messages transmit-
ted over the wireless medium.
The findings reveal that variations in packet loss
rates and the number of nodes participating in the ma-
neuver significantly influence consensus delays and
the percentage of finalized processes. Higher packet
loss results in longer consensus times and a reduced
rate of successful process completions across all al-
gorithms. This outcome is largely driven by delays
caused by retransmissions and the handling of miss-
ing messages. The impact is especially pronounced
under extreme packet loss conditions, such as 20%,
where delays increase substantially, and success rates
decline sharply.
The impact of increasing the number of nodes is
also noticeable. A larger number of nodes in the
consensus process introduce greater communication
overhead, extending consensus times across all algo-
rithms. However, increasing the node count can en-
hance fault-tolerance, leading to higher success rates
for some algorithms. For example, with PBFT un-
der 20% packet loss, the success rate improves from
approximately 54% (4 replicas) to 68% (7) and 86%
(10). On the other hand, the success rate for 3PC
drops significantly as node count increases, highlight-
ing the limitations of non-BFT algorithms in lossy en-
vironments.
Among the evaluated algorithms, Zyzzyva consis-
tently outperforms the others in terms of robustness
and efficiency. It maintains shorter consensus times
and higher completion rates even in unreliable net-
work conditions, showcasing strong resilience. PBFT
performs adequately under moderate conditions but
suffers from longer delays and reduced success rates
as packet loss rises. In contrast, HotStuff and 3PC
exhibit high sensitivity to packet loss, with significant
increases in total delays and steep drops in completion
rates, rendering them less reliable in such scenarios.
7 CONCLUSION
In this article, a comparative analysis is presented re-
garding the application of four different consensus
algorithms to the negotiation of cooperative traffic
maneuvers. Three of the selected protocols exhibit
Byzantine Fault-Tolerance (BFT) properties, while
one is non-BFT (3PC). This evaluation was conducted
using VEP to extend standard C-ITS messages, ensur-
ing that the Channel Busy Ratio (CBR) was not over-
loaded. The consensus framework was validated in
a local environment with several containers running
the ETSI ITS-G5 protocol stack and VEP. The ob-
tained results show that both packet loss and the num-
ber of nodes involved in the maneuver have a signifi-
cant impact on the time taken to reach consensus and
the rate of successfully completed processes. While
this research focuses on decision-making for traf-
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
244
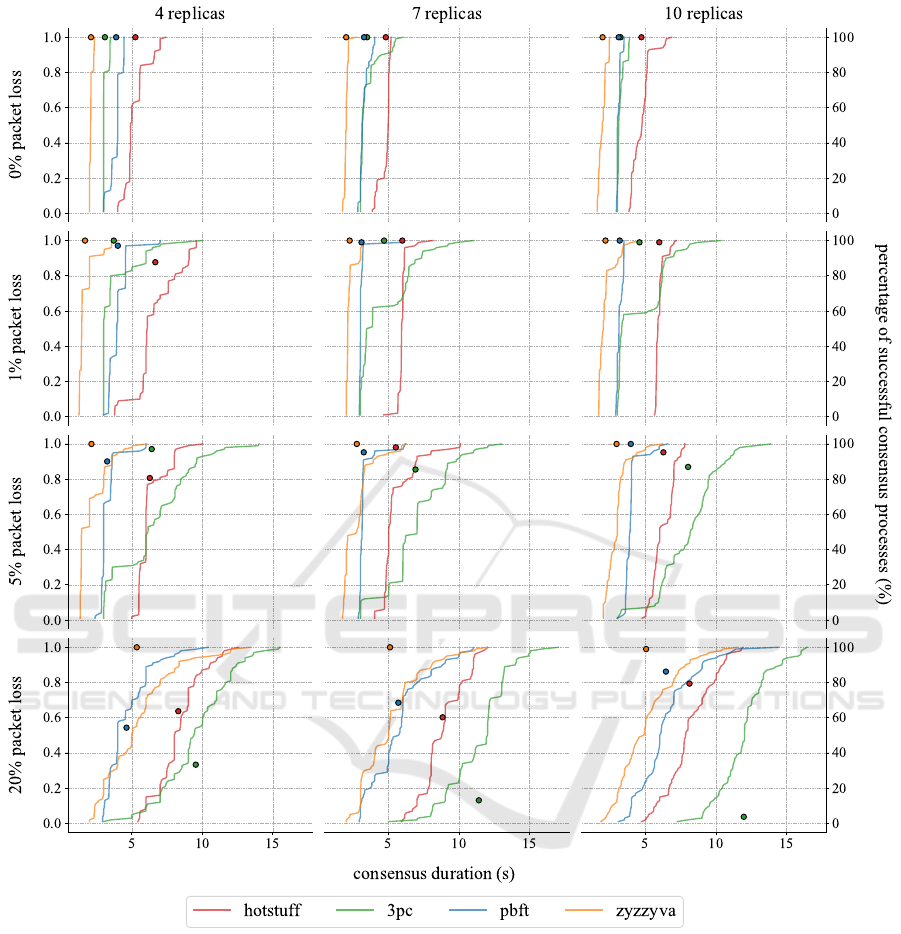
Figure 6: ECDF of consensus duration (s) and percentage of successful consensus processes (%) for the four implemented
algorithms. The results were obtained for several packet loss rates and number of replicas. The ratio of successful processes
(% in the y-axis) is plotted over the average consensus duration values (seconds in the x-axis) for each algorithm.
fic maneuvers, the proposed methods are adaptable
to other scenarios requiring decentralized decision-
making, such as fleet management or coordinated re-
sponses in emergency situations.
Future work could explore additional consensus
algorithms, including hybrid approaches that adapt to
the specific requirements of each situation. For in-
stance, in scenarios where unanimous agreement is
critical, the system could dynamically select the most
appropriate algorithm compared to cases where a ma-
jority vote is sufficient. Another possible line of work
involves developing mechanisms to deal with mali-
cious nodes. For example, by keeping records of the
processes in each vehicle, it could be possible to iden-
tify and penalize the nodes responsible for unsuccess-
ful maneuvers, once a consensus has been reached.
In addition, further investigation is warranted to op-
timize the synchronization process for the remaining
vehicles. While related work discusses a gossip proto-
col, exploring alternative methods to reduce message
Application of Consensus Protocols to Vehicular Communications Scenarios for the Negotiation of Cooperative Traffic Maneuvers
245

overhead and improve efficiency could yield signifi-
cant benefits.
ACKNOWLEDGEMENTS
This work is supported by the European Union / Next
Generation EU, through Programa de Recuperac¸
˜
ao e
Resili
ˆ
encia (PRR) [Project Nr. 29: Route 25 (02/C05-
i01.01/2022.PC645463824-00000063)].
REFERENCES
Abd-El-Malek, M., Ganger, G. R., Goodson, G. R., Re-
iter, M. K., and Wylie, J. J. (2005). Fault-scalable
Byzantine fault-tolerant services. In Proceedings of
the Twentieth ACM Symposium on Operating Systems
Principles, SOSP ’05, page 59–74, New York, NY,
USA. Association for Computing Machinery.
Al-Houmaily, Y. J. and Samaras, G. (2009). Three-Phase
Commit, pages 3091–3097. Springer US, Boston,
MA.
Castro, M. and Liskov, B. (1999). Practical Byzantine Fault
Tolerance. In 3rd Symposium on Operating Systems
Design and Implementation (OSDI 99), New Orleans,
LA. USENIX Association.
Feng, C., Xu, Z., Zhu, X., Klaine, P. V., and Zhang, L.
(2023). Wireless Distributed Consensus in Vehicle
to Vehicle Networks for Autonomous Driving. IEEE
Transactions on Vehicular Technology, 72(6):8061–
8073.
Kiraz, M., Sivrikaya, F., and Albayrak, S. (2024). A Survey
on Sensor Selection and Placement for Connected and
Automated Mobility. IEEE Open Journal of Intelli-
gent Transportation Systems, 5:692–710.
Kotla, R., Alvisi, L., Dahlin, M., Clement, A., and Wong,
E. (2010). Zyzzyva: Speculative Byzantine fault tol-
erance. ACM Trans. Comput. Syst., 27(4).
Li, Z., Zhang, L., Zhang, X., and Imran, M. (2022). Design
and Implementation of a Raft based Wireless Consen-
sus System for Autonomous Driving. In GLOBECOM
2022 - 2022 IEEE Global Communications Confer-
ence, pages 3736–3741.
Molina-Masegosa, R., Gozalvez, J., and Sepulcre, M.
(2020). Comparison of IEEE 802.11p and LTE-V2X:
An Evaluation With Periodic and Aperiodic Mes-
sages of Constant and Variable Size. IEEE Access,
8:121526–121548.
Paluszczyszyn, D., Stamenkovic, V. R., and Lane, B.
(2024). Toward Development of Ecosystem for Con-
nected Autonomous Vehicles: Challenges of Mod-
eling and Testing Sensors. IEEE Sensors Letters,
8(3):1–2.
Vieira, E., Almeida, J., Ferreira, J., and Bartolomeu, P. C.
(2023). Safeguarding Cooperative Maneuver Informa-
tion with Practical Byzantine Fault Tolerance. In 2023
53rd Annual IEEE/IFIP International Conference on
Dependable Systems and Networks Workshops (DSN-
W), pages 108–115.
Vieira, E., Almeida, J., Ferreira, J., and Bartolomeu, P. C.
(2024a). Enabling Seamless Data Security, Consen-
sus, and Trading in Vehicular Networks. IEEE Trans-
actions on Intelligent Vehicles, pages 1–22.
Vieira, E., Almeida, J., Ferreira, J., and Bartolomeu, P. C.
(2024b). Extending V2X Messages for the Implemen-
tation of Consensus-Building Mechanisms in C-ITS.
In CARS@EDCC2024 Workshop - Critical Automo-
tive applications: Robustness & Safety, Leuven, Bel-
gium.
Yin, M., Malkhi, D., Reiter, M. K., Gueta, G. G., and Abra-
ham, I. (2019). HotStuff: BFT Consensus with Lin-
earity and Responsiveness. In Proceedings of the 2019
ACM Symposium on Principles of Distributed Com-
puting, PODC ’19, page 347–356, New York, NY,
USA. Association for Computing Machinery.
Zhang, G., Pan, F., Mao, Y., Tijanic, S., Dang’ana, M.,
Motepalli, S., Zhang, S., and Jacobsen, H.-A. (2024).
Reaching Consensus in the Byzantine Empire: A
Comprehensive Review of BFT Consensus Algo-
rithms. ACM Comput. Surv., 56(5).
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
246
